直縫焊管自動超聲探傷系統設計
2016-03-31 06:03:42周平
華僑大學學報(自然科學版) 2016年2期
周平
(江西工程學院 機電工程學院, 江西 新余 338000)
?
直縫焊管自動超聲探傷系統設計
周平
(江西工程學院 機電工程學院, 江西 新余 338000)
摘要:針對直縫焊管生產中傳統應用手工探傷效率低、故障率高等問題,利用超聲無損探傷精度高、速度快的優點,構建以可編程控制器(PLC)為核心的直縫焊管自動超聲探傷系統.提出該系統的工藝參數和系統機械構成,設計系統的PLC控制硬件、PLC程序流程及PLC控制程序.系統的操作監控硬件選用臺達觸摸屏,給出基于Windows系統觸摸屏編程軟件設計的人機操作監控畫面.運行結果顯示:該系統結構穩定、可靠.
關鍵詞:直縫焊管; 超聲探傷; 可編程控制器; 觸摸屏
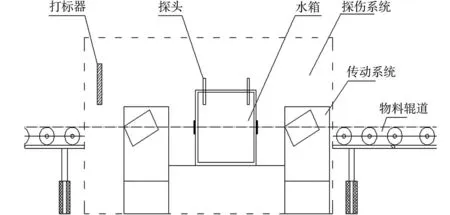
圖1 系統結構簡圖Fig.1 System structure diagram
直縫焊管JCOE成形過程包含板邊預彎、管坯JCO成形和管坯機械擴徑3個主要成形工序[1-6].為保障焊管生產質量,加工工序中一個重要的環節是對焊管進行無損檢測.傳統焊管檢測采用操作人員現場手持式探傷儀檢測方式,效率低,精度差,故障率較高.超聲波無損檢測因其檢測精度高、速度快等優點在工業領域中得到了廣泛的應用[7].本文應用可編程控制器(PLC)作為控制核心,將超聲無損檢測技術應用于直縫焊管生產中,設計直縫焊管自動超聲探傷系統.
1系統原理
直縫焊管自動探傷工藝流程如下:上料→進料→壓料→探傷→打標→松料→出料分選.根據工藝流程設計的系統機械結構簡圖,如圖1所示.
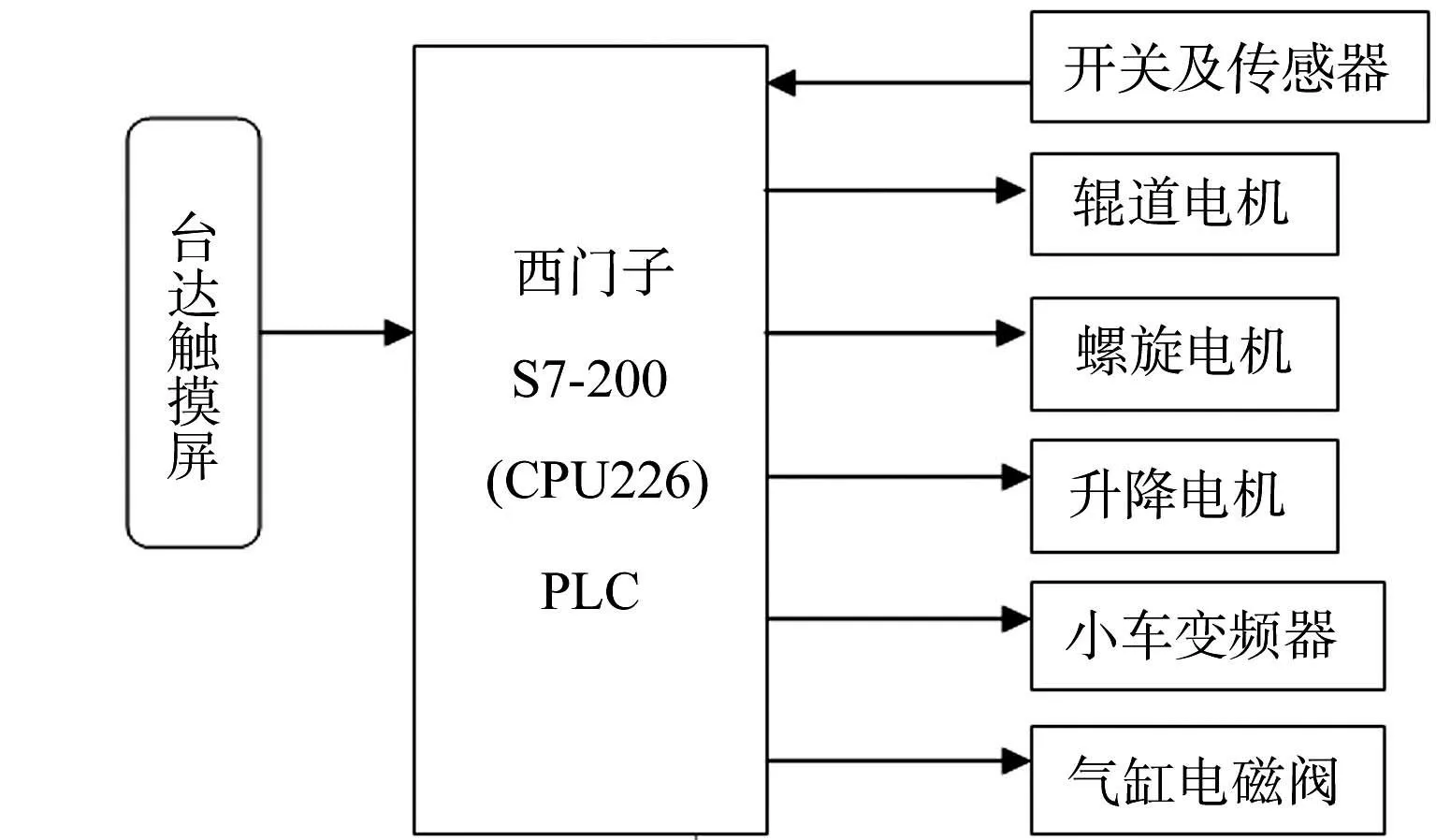
圖2 系統控制硬件結構Fig.2 Control system hardware structure

2系統控制硬件設計
2.1系統控制硬件組成
系統控制硬件結構,如圖2所示.直縫焊管自動超聲探傷系統控制采用西門子S7-200(CPU226)型PLC為控制核心,擴展1個32輸入/32輸出EM223模塊、2個16 輸入EM221數字量模塊和1個EM231模擬量輸入模塊完成系統控制[11-12].焊管運輸小車采用西門子VF1型變頻器調速,系統操作監控采用臺達觸摸屏.
2.2PLC硬件信號分配
根據焊管自動超聲探傷系統的控制設計要求,對PLC的I/O口進行信號分配,設計的PLC輸入信號和輸出信號接線圖,分別如圖3,4所示.
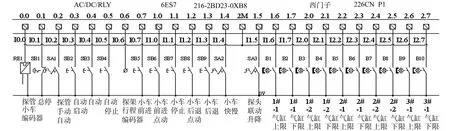
圖3 PLC主模塊輸入信號接線圖Fig.3 PLC main module input signal wiring diagram
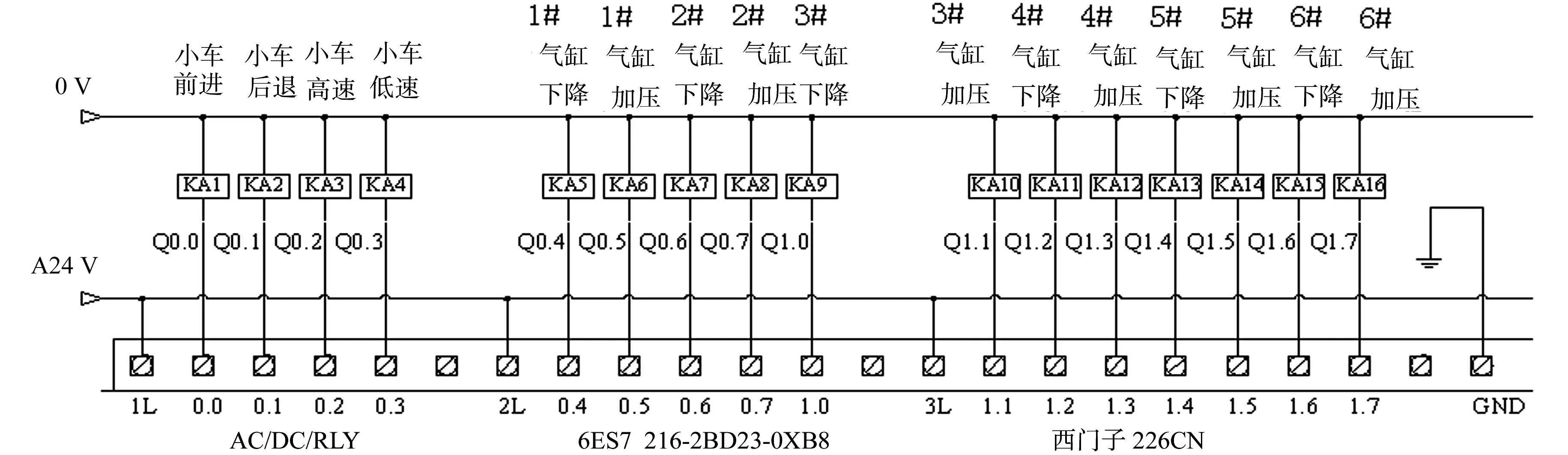
圖4 PLC主模塊輸出信號接線圖Fig.4 PLC main module output signal wiring diagram

圖5 系統PLC主程序流程Fig.5 Main program flow chart of PLC system
3系統PLC軟件設計
3.1PLC控制流程
PLC程序采用西門子PLC編程軟件STEP 7- Micro/WIN V4.0 SP8編制.程序編程為結構化編程模式[13-16],分為主程序、運管小車速度子程序、手動子程序、自動子程序、自動復位子程序、手動復位子程序、系統總停子程序、運管小車編碼器脈沖高速計數子程序等,有自動、手動、單動控制功能.PLC主程序流程,如圖5所示.
3.2PLC程序實現
根據直縫焊管超聲探傷工藝及控制流程,編寫PLC控制程序,相應的控制子程序如圖6所示.
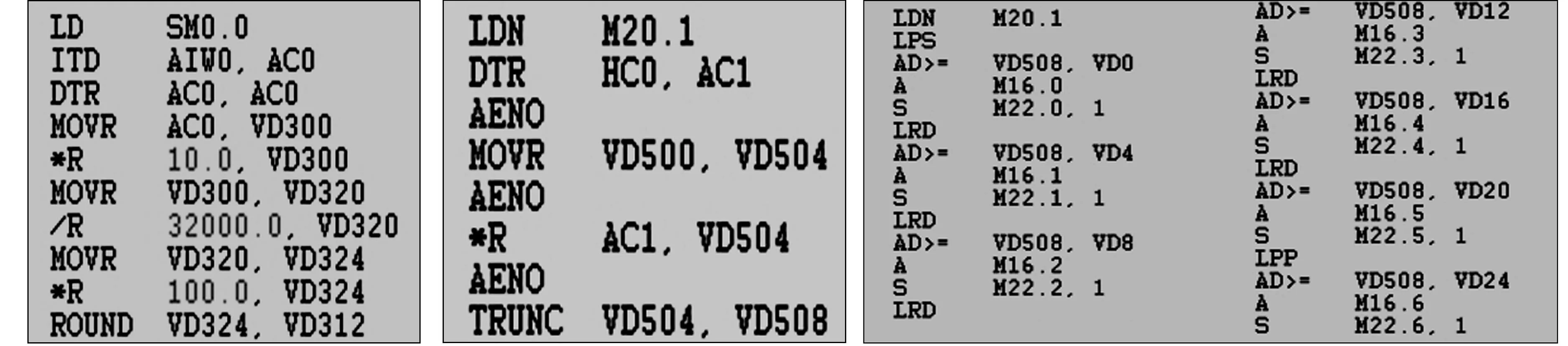
(a) 運管小車速度 (b) 小車行走距離計算 (c) 超聲探頭自動下降 圖6 系統控制PLC子程序Fig.6 PLC subroutine of system control
運管小車速度控制子程序(圖6(a))中,VD300寄存器中數據單位為小車每分鐘圈數,VD320寄存器中數據單位為m·min-1,電流頻率為60 Hz時,小車最大速度為10 m·min-1.
小車行走距離計算PLC控制程序(圖6(b))中,將編碼器脈沖高速計數器HSC0當前值轉換為實數,計數脈沖數乘以VD500寄存器中的脈沖當量;然后,取整數轉存VD508寄存器,VD508存儲的數據即為小車行走的距離.
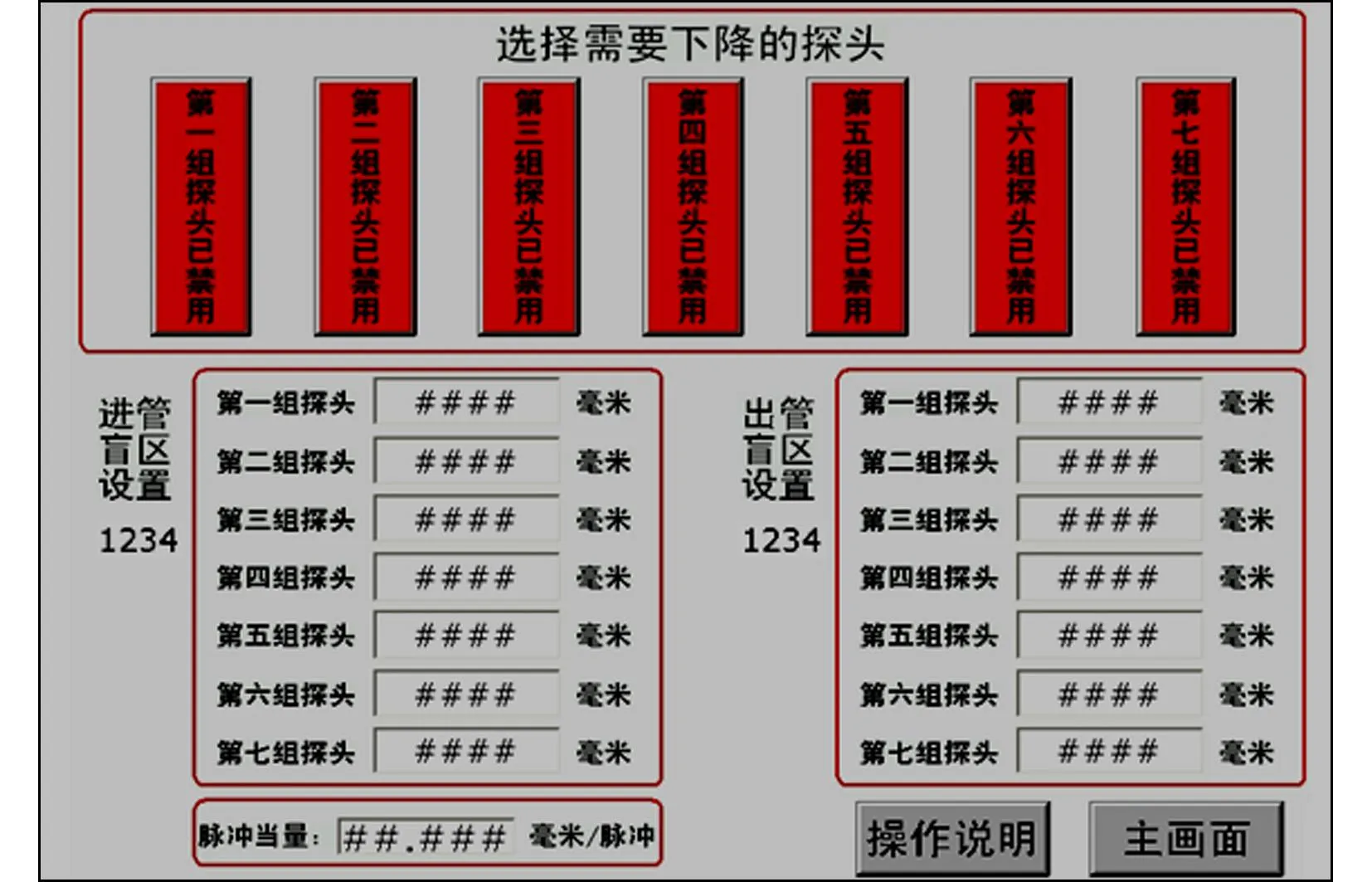
(a) 參數設置畫面
超聲探頭自動下降控制PLC程序(圖6(c))中,小車當前行走距離VD508寄存器的數據和第一到第七組超聲探頭探管區域設定值寄存器VD0~VD24中的數據進行比較,達到設定值時,探頭下降.程序中,PLC內部寄存器M16.0~M16.6為選擇探頭下降的中間繼電器,寄存器M22.0~M22.6對應第一組到第七組探頭下降氣缸電磁閥PLC控制輸出Q0.4,Q0.6,Q1.0,Q1.2,Q1.4,Q1.6,Q2.0.
4系統操作監控界面設計
直縫焊管自動超聲探傷系統操作監控硬件采用臺達公司的DOP-B系列觸摸屏,應用基于Windows系統編程軟件Screen Edit設計觸摸屏操作監控界面[17-20].觸摸屏顯示畫面由系統主畫面、監控報警畫面、參數設置畫面等組成.設計的部分觸摸屏操作監控畫面,如圖7所示.

(b) 主畫面 (c) 監控報警畫面圖7 系統操作監控界面的顯示畫面Fig.7 Display screen of the system operation monitoring interface
5結論
1) 針對直縫焊管傳統人工探傷效率低、精度差等缺點,構建以西門子PLC為控制核心的直縫焊管自動超聲探傷系統.應用西門子S7-200PLC的高速計數與比較功能實現超聲探頭的自動下降和運管小車定位控制,檢測速度快,精確度較高.系統調試中高速計數脈沖當量的選定與超聲探頭安裝位置、小車的速度、 編碼器的參數相關.
2) 觸摸屏具有人機交互、 靈活的優點,減少了操作臺上的開關數量,使操作更加人性化.通過觸摸屏可實時顯示自動超聲探傷系統參數,修改系統參數便捷,系統柔性較好.設計的觸摸屏監控畫面具有超聲波傷波、失波等報警功能,確保了直縫焊管檢測中的安全,避免了人工操作錯誤和生產故障的產生.
3) 自動超聲探傷系統設計方案簡潔,系統控制硬件結構簡單,成本較低,配合操作監控觸摸屏,使工作效率得到提高,系統具有控制穩定、可靠高的特點,具有良好的實際應用性.
參考文獻:
[1]屈曉陽.大型直縫焊管JCOE成形工藝及CAPP系統研究[D].秦皇島:燕山大學,2012:1-10.
[2]FRYER M,TAIT P,KYRIAKIDES S,et al.The prediction and enhancement of UOE-DSAW collapse resistance for deepwater linepipe[C]∥Proceedings of the Fifth Biennial International Pipeline Conference.Calgary:ASME,2004:1961-1966.
[3]KYRIAKIDES S,CORONA E,FISCHER F J.On the effect of the U-O-E manufacturing process on the collapse pressure of long tubes[J].Journal of Engineering for Industry,1994,116(1):93-100.
[4]AL-SHARIF A M,PRESTON R.Improvement in UOE pipe collapse resistance by thermal aging[C]∥Proceeding of the Offshore Technology Conference.Houston:Richardson,1996:579-588.
[5]SUZUKI M,ENDO S,SUGA M.Effect of PWHT on flash butt welded joint of TMCP steel UOE pipe[C]∥Proceedings of the 8th International Conference on Offshore Mechanics and Arctic Engineering Symposium.Hague:American Society of Mechanical Engineers,1989:277-283.
[6]王曉香.我國油氣長輸管線用焊接鋼管生產技術的發展與展望[J].鋼管,2004,33(3):7-13.
[7]劉鎮清,景永剛.增強超聲探傷信號的分離譜處理方法[J].無損檢測,2001,23(3):132-135.
[8]鄭熙,侯力,王裕林,等.厚壁無縫鋼管的超聲波檢測系統[J].機械設計與制造,2010(7):90-92.
[9]涂葵.薄壁小徑管焊接接頭超聲波探傷[J].江西冶金,2013,33(2):40-42.
[10]孫紅磊,趙軍.大型管件JCOE成形智能化控制中的材料性能參數識別[J].燕山大學學報,2011,35(3):223-226.
[11]廖常初.可編程序控制器的編程方法與工程應用[M].重慶:重慶大學出版社,2010:1-30.
[12]李躍進,蘇鋼.電氣自動控制新技術在?340 mm直縫焊管機組上的應用[J].焊管,2002,25(6):45-46.
[13]駱國平,紀建軍.基于西門子611A的鋼管對接位置閉環控制系統[J].控制工程,2008(增刊2):94-95.
[14]丁旭升,林彬泉,楊青蘭.基于PLC的鋼管自動超聲探傷控制系統的設計[J].機電工程技術,2009,38(7):20-22.
[15]海心,馬銀忠,劉樹青.西門子PLC開發入門與典型事例[M].北京:人民郵電出版社,2010:120-139.
[16]趙心,朱軍,張環宇,等.基于PLC的螺旋焊管自動優化剪切系統的設計[J].機械設計與制造,2013(7):50-52.
[17]金英姬.基于PLC與觸摸屏實現液壓教學實驗臺控制系統的研究[J].實驗技術與管理,2012,29(4):151-154.
[18]田龍,馮湛清.PLC和觸摸屏的壓力式自動噴涂系統設計[J].制造業自動化,2007,29(6):64-66.
[19]齊鵬飛,羅繼亮,陳雪琨.PLC程序形式化的設計與驗證[J].華僑大學學報(自然科學版),2013(3):241-246.
[20]彭彥卿.人機界面的開發與應用[J].鷺江職業大學學報,2004,12(4):82-85.
(責任編輯: 黃曉楠 英文審校: 楊建紅)
Design of Automatic Ultrasonic Inspection System of Longitudinal Welded Pipe
ZHOU Ping
(Jiangxi College of Engineering, School of Mechanical and Electrical Engineering, Xinyu 338000, China)
Abstract:Aiming at the problem of low manual detection efficiency and high failure rate in traditional longitudinal welded pipe production, using the advantages of high accuracy, high speed of ultrasonic nondestructive testing, taking the programmable controller (PLC) as the core, a set of automatic ultrasonic inspection system of the longitudinal welded pipe is designed. The paper summarizes the longitudinal-seam welded pipe automatic ultrasonic inspection system. The process parameters and the mechanical structure of the system are put forward, and the PLC control hardware, program flow and control procedures of the system are designed accordingly. A touch screen is chosen for system operation monitoring, and the man-machine operation monitoring picture based on the touch screen programming software design of the Windows system is given.
Keywords:longitudinal welded pipe; ultrasonic inspection; programmable logic controller; touch screen
中圖分類號:TH 39; TG 115.285
文獻標志碼:A
基金項目:江西省教育廳科技項目(GJJ14815)
通信作者:周平(1970-),男,副教授,主要從事自動化和機電技術的研究.E-mail:2865181276@qq.com.
收稿日期:2015-12-22
doi:10.11830/ISSN.1000-5013.2016.02.0145
文章編號:1000-5013(2016)02-0145-04
