基于趨近律方法的永磁同步電機滑模速度控制器設計
2016-04-08 05:08:10楊立秋海軍駐昆明地區軍事代表辦事處昆明6508解放軍理工大學南京0000
船電技術 2016年1期
楊立秋,袁 雷(.海軍駐昆明地區軍事代表辦事處,昆明6508;.解放軍理工大學,南京0000)
?
基于趨近律方法的永磁同步電機滑模速度控制器設計
楊立秋1,袁雷2
(1.海軍駐昆明地區軍事代表辦事處,昆明650118;2.解放軍理工大學,南京210000)
摘要:為了提高永磁同步電機(permanent magnet synchronous motor,PMSM)調速系統的動態品質,提出了一種基于趨近律方法的滑模速度控制策略。為了解決傳統指數趨近律所存在的缺點,文中首先設計了一種改進的指數趨近律算法,該方法能夠根據系統狀態距離平衡點的遠近而自適應調整趨近律速度;基于改進的指數趨近率設計了適用PMSM調速系統的速度滑模控制器。通過仿真結果驗證了所提控制算法的有效性和可行性。
關鍵詞:永磁同步電機趨近律方法滑模控制
0 引言
永磁同步電機(Permanent magnet synchronous motor,PMSM)由于其結構簡單、體積小和功率密度高等優點而被廣泛使用[1-3]。目前,三相交流PMSM調速矢量控制系統中的速度控制器普遍采用傳統的PI控制,其算法具有簡單、可靠性高及參數整定方便等優點。然而,由于三相PMSM是一個多維、非線性、強耦合的多變量系統,當控制系統受到外界擾動的影響或電機內部參數發生變化時,傳統的PI控制方法并不能滿足實際的要求[4]。
隨著現代控制技術的發展,一些先進的控制算法逐步被應用于交流調速系統,以解決傳統PI速度控制器存在的問題。目前,滑模控制(Sliding-mode control,SMC)作為一類特殊的非線性控制策略,由于其控制器設計簡單,響應速度快和對參數變化和外部擾動具有強魯棒性等優點而被廣泛應用[5-8]。然而它也存在一個缺點:SMC對外界擾動和參數變化的抑制是通過增大切換增益來實現的,因此外界擾動的存在及參數的變化必然導致SMC的抖振現象的產生。根據滑模控制的基本原理,滑模可達性條件僅保證由狀態空間任意位置運動點在有限時間到達切換面的要求,而趨近運動軌跡未作任何限制,采用趨近律的方法可改善趨近運動的動態品質。
為此,本文首先設計了一種改進的指數趨近律算法,該方法能夠根據系統狀態距離平衡點的遠近而自適應調整趨近律速度。并基于此方法設計一種新型速度滑模控制器,理論分析證明了PMSM控制系統的穩定性。仿真結果證明了該控制策略的正確性與有效性。
1 改進的滑模趨近律設計
高為炳院士首先提出趨近律的概念,并設計了一種在國內外得到廣泛應用的指數趨近律,其表達式為[9]:

對于指數趨近律,通過調整趨近律的參數ε,k ,即可以保證滑動模態到達過程的動態品質,又可以減弱控制信號的高頻抖陣問題,但較大的ε值會導致抖陣現象。為了解決上述問題,文中設計了一種改進的指數趨近律算法,其表達式為:

2 滑模速度控制器設計
2.1 三相PMSM的數學模型

2.2 滑模轉速控制器設計
為了便于控制器的設計,首先定義系統狀態變量為:

式中,ωref為轉速參考值,通常為一常數值。另外,根據式(3)和(4)可以得到如下表達式:


定義滑模面函數為:

對滑模面函數求導,并將式(6)代入可得

采用式(2)所示的趨近律方法,可以求得控制器表達式為:

從而可求得q軸的參考電流量為

可以表達式(10)可以看出,q軸的參考電流量經過了積分器的濾波作用,一方面可進一步削弱抖振現象,另一方面也可消除系統穩態誤差,提高系統的動態品質。具體實現框圖如圖1所示。
2.3 穩定性分析
為了分析控制器的穩定性,定義Lyapunov函數為:對其求導,并將式(8)和(9)代入,可得


3 仿真結果分析
為了驗證本文提出算法的有效性,基于如圖2所示的PMSM矢量控制系統結構圖,對提出的控制策略進行仿真研究,并與常規PI控制器相比較。仿真中PMSM的參數:電阻R =0.2 Ω,極對數轉動慣量J=0.089kg m2,定子電感另外,滑模速度控制器的參數設置為α=2,c=100,k=50,ε=10。仿真條件設置為:轉速參考值設置為500 r/min,在t=0.5 s突加負載TL=50 N.m。為了便于比較分析分別給出了采用PI控制器和滑模速度控制器的仿真結果,具體仿真結果分別如圖3和圖4所示。
通過比較圖3和圖4可以看出,無論是轉速的動態響應速度和抗擾動能力,文中所提的控制策略都具有較好的控制效果,從而說明了該控制算法的有效性和強魯棒性。
4 結論
本文針對常規的滑模控制算法在PMSM低速運行時產生的轉速脈動及電磁轉矩脈動問題,將在電機實際運行過程中的參數變化及不確定性和外部擾動等效為總的干擾量,并設計了一種新型速度滑模控制器。相對于常規滑模控制器其優點在于:對負載擾動和參數的不確定性具有較強的魯棒性,抑制了PMSM的脈動現象。

圖1 基于趨近律方法的滑模速度控制器框圖

圖2 PMSM滑模控制系統原理圖
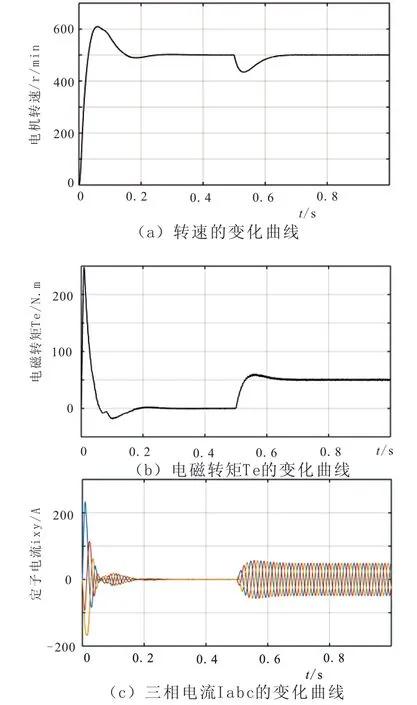
圖3 基于PI速度控制器的仿真結果


圖4 基于滑模速度控制器的仿真結果
參考文獻:
[1] 袁雷,沈建清,肖飛,等.插入式永磁低速同步電機非奇異終端滑模觀測器設計[J].物理學報,2013,62(3):030501.
[2] 楊書生,鐘宜生.永磁同步電機轉速伺服系統魯棒控制器設計[J].中國電機工程學報,2009,29(3):84-89.
[3] Hans-Peter Nee.Determination of d and q reactances of permanent-magnet synchronous motors without measurements of the rotor position [J].IEEE Trans.on Industry Applications,2000,36 (5):1330-1334.
[4] 汪海波,周波,方斯琛.永磁同步電機調速系統的滑模控制[J].電工技術學報,2009,24(9):71-77.
[5] 張曉光,趙克,孫力.永磁同步電動機混合非奇異終端滑模變結構控制[J].中國電機工程學報,2011,31(27):116-122.
[6] 張曉光,趙克,孫力,等.永磁同步電動機滑模變結構調速系統新型趨近率控制[J].中國電機工程學報,2011,31(24):77-82.
[7] Paponpen K,Konghirun M.An improved sliding mode observer for speed sensorless vector control drive of PMSM[J].IPEMC,2006,(2):1-5.
[8] Han Y,Choi J,Kim Y.Sensorless PMSM drive with a sliding mode control based adaptive speed and stator resistance estimator[J].IEEE Transactions on Magnetics,2000,36(5):3588-3591.
[9] W.Gao and J.Hung,Variable structure control of nonlinear systems:a new approach [J].IEEE Transactions on Industrial Electronics,1993,40(1):45–55.
Design of Speed sliding Mode Controller for Permanent Magnet Synchronous Motor Based on Reaching Law Method
Yang Liqiu1,Yuan Lei2
(1.Naval Representatives Office in Kunming Area,Kunming 650118,China;2.PLA University of Science and Technology,Nanjing 210000,China)
Abstract:To improve the control performance,a siding mode speed controller strategy based on reaching law method is proposed for permanent magnet synchronous motor (PMSM) in this paper.First of all,a novel reaching law method is designed to solve the existing problems in traditional reaching law,a novel siding mode control (SMC) based on the proposed reaching law method is designed by using of the advantages,which can effectively improve system robustness and response.All results show that the algorithm has the advantages of faster response,less stabilization error,and also the vibration is restrained effectively.
Keywords:permanent magnet synchronous motor;reaching law;sliding mode control
作者簡介:楊立秋(1988-),男,工程師。研究方向:水中兵器。
收稿日期:2015-10-09
中圖分類號:TM351
文獻標識碼:A
文章編號:1003-4862(2016)01-0074-04
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年10期)2018-08-20 02:57:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
通信電源技術(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
