異形電子元器件插裝機器人抓手設計與分析
2016-04-12 06:53:22Designandanalysisofthegripperoftheassemblyrobotofprofiledelectroniccomponents
制造業自動化 2016年3期
Design and analysis of the gripper of the assembly robot of profiled electronic components
王 越,伍昕忠,李本海,榮 鈺
(機械科學研究總院,北京 100044)
WANG Yue, WU Xin-zhong, LI Ben-hai, RONG Yu
?
異形電子元器件插裝機器人抓手設計與分析
Design and analysis of the gripper of the assembly robot of profiled electronic components
王越,伍昕忠,李本海,榮鈺
(機械科學研究總院,北京 100044)
WANG Yue,WU Xin-zhong,LI Ben-hai,RONG Yu
摘要:基于機器人的自動化裝配技術已成為現代化生產的重要研究方向,對機器人末端執行器的研究是實現自動化裝配技術的關鍵。針對小型異形電子元器件的自動插裝作業要求,設計了一款插裝機器人的抓手,該抓手集成了CCD機器視覺系統、光纖傳感器檢測系統和碰撞緩沖系統,實現了異形電子元器件的可靠抓取、精確定位、元器件針腳碰撞檢測、插裝到位檢測等功能。在分析抓手功能的基礎上,詳細介紹了總體方案及抓手的結構設計并應用ANSYS分析軟件對抓手末端夾持部分進行了力學分析。試驗證明,該抓手具有良好的應用前景。
關鍵詞:異形電子元器件;插裝機器人;抓手設計;力學分析
0 引言
隨著機器人技術的成熟,帶動了自動化裝配技術的快速發展。現在主要依靠手工插裝的異形電子元器件,也希望由六關節機器人自動將其插裝在電路板上。
由于異型電子元器件種類較多,外形尺寸和管腳數量變化較大,所以抓手設計要綜合考慮其通用性,僅變抓手末端夾片的樣式和尺寸。
電路板上的插裝孔比針腳直徑大0.4mm左右,所以需要在插裝時精確定位。
插裝過程中要檢測針腳是否插入到位,所以需要碰撞檢測和碰撞緩沖系統。
為了實現小型異形電子元器件往電路板上的自動插裝作業功能,同時提高自動化水平和生產效率,減輕生產者的勞動強度,本文對插裝機器人的抓手進行了設計研究。
1 總體方案設計
抓手總體結構方案如圖1所示,通過法蘭盤安裝在六關節機器人的末端,抓手可以先后抓取四個異形電子元器件。主要由夾爪支撐架、CCD機器視覺系統、LED光源和四套夾爪組成,其中四套夾爪除夾片不同外,采用相同的結構,具有互換性。
CCD機器視覺系統安裝在夾爪支撐架內部,LED光源安裝在夾爪支撐架底部,共同完成電路板上定位孔的檢測,以精確定位抓手。需要說明的是,異形電子元器件的針腳位置和姿態檢測是由另外套CCD機器視覺系統完成。
夾爪支撐架下部為錐形,四套夾爪均勻分布在圓錐切面上,每套夾爪均由滑臺、上擋板、下擋板、連接板、氣爪、左右夾片、拉簧和光纖傳感器組成。其中,連接板、氣爪、夾片通過螺釘連接在起,在拉簧的作用下緊貼在下擋板上,當電子元器件的針腳未能準確插入孔中時,上述組件沿滑臺上移,觸發光纖傳感器發訊,實現碰撞檢測。
氣爪的開合實現電子元器件的夾取與釋放,根據電子元器件的形狀不同,在氣爪上安裝相應的夾片,就可以實現快換。在夾片上設計凸臺,起到定位元件的作用。

圖1 抓手總體結構方案
2 結構設計
在對總體方案進行分析的基礎上,對該抓手進行了詳細的結構設計。本文重點介紹夾爪支撐架和夾片的結構設計。
2.1夾爪支撐架
夾爪支撐架是抓手的主體部分,CCD機器視覺系統、LED光源和四套夾爪等組件都連接其上。
如圖2所示,夾爪支撐架采用殼體結構,材料為鋁合金,殼體厚度為5mm。相機外形近似為個30×30×55的立方體,可以完全容納在支撐架下端錐體內。支撐架上端留方形孔,以方便相機引線與控制設備的連接。
夾爪支撐架的設計重點是下部錐度設計,錐度應盡可能小,以減小抓手外形尺寸。但是在實際應用中要考慮電路板上已經插裝的電子元件的高度,當個夾爪插裝元件時,應保證其左右兩側的夾爪夾持元件后與電路板上元件不會發生干涉。
本文根據實際插裝的需求,經過計算,將錐體角度設為30°。
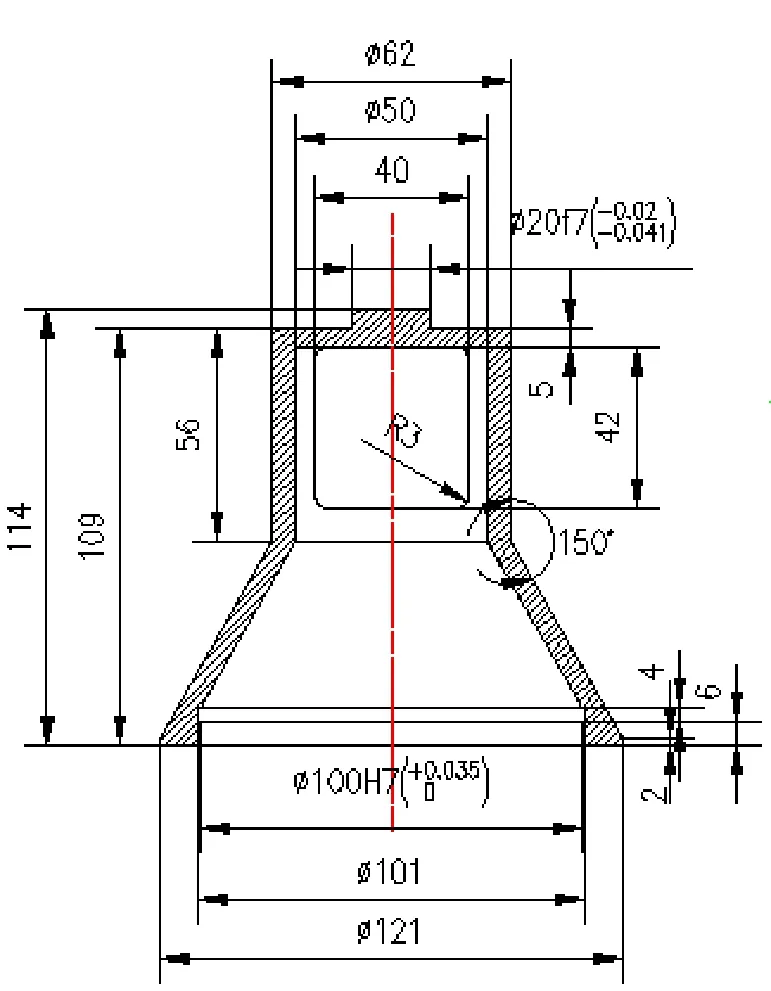
圖2 夾爪支撐架零件圖
2.2夾片
夾片是抓手的主要受力部分,也是保證插裝精度的重要環節。如圖3所示,為某電子元器件的夾片零件圖。夾片采用整體式結構,材料為鋁合金。此種結構的優點是加工簡單,安裝方便,適應元件的多樣性。但由于夾持面與安裝面之間距離較大,會產生較大彎矩,使夾片產生彎曲變形,所以設計時要重點對夾片進行受力分析與變形分析。
夾片夾持端的厚度受電路板上的元件間距的限制。在插裝時,電路板上已有插裝好的元件,為了避免碰撞,夾片夾持端厚度越薄越好,但厚度越薄越容易發生變形,所以通過計算,選用3mm厚度,同時背端倒70度倒角,進步減小末端厚度。
通過計算,安裝面連接處應力最大,選用3mm厚度。
由于需要對元件豎直方向進行定位,夾片的夾持面和安裝面沒有設計成個平面內,而是形成個凸臺,這樣就可以確保元件插入端處于個水平面上,保證機器視覺檢測的質量和精度,以及插裝平面的安全距離。
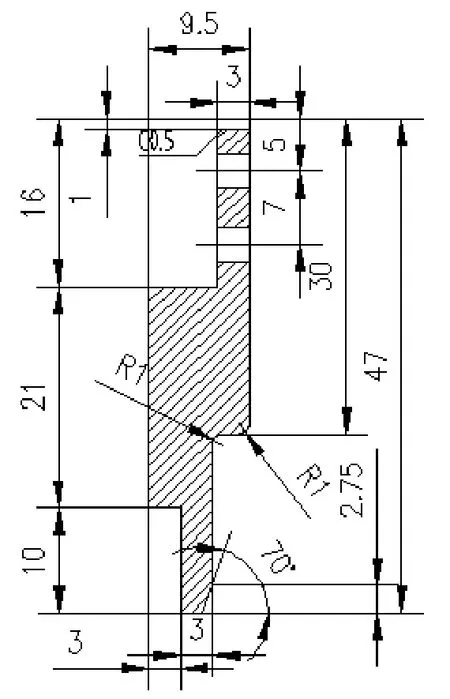
圖3 夾片零件圖
3 抓手夾持末端力學分析
3.1材料設定
首先對模型材料進行設定,該夾片采用6061鋁合金材料進行加工生產,如表1所示,為該鋁合金材料的參數。
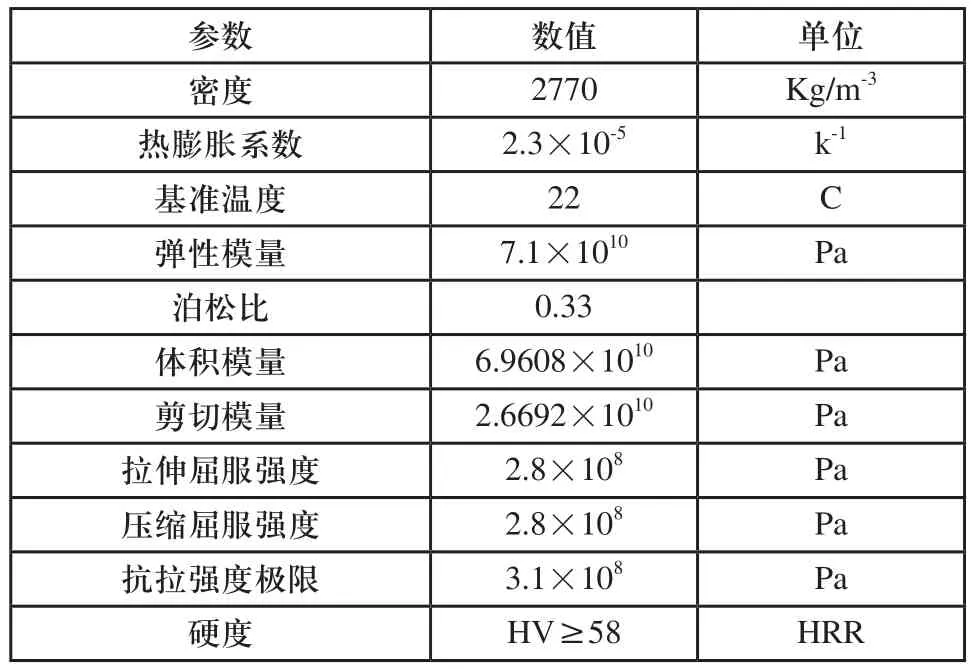
表1 鋁合金材料參數
3.2限位和施加載荷
圖5為ANSYS力學分析的靜態結構圖,夾片在A面通過螺釘連接在氣爪上,6自由度完全定位,在C面上施加平均載荷2.6×105Pa。

圖4 氣爪夾持力圖
3.3結果分析
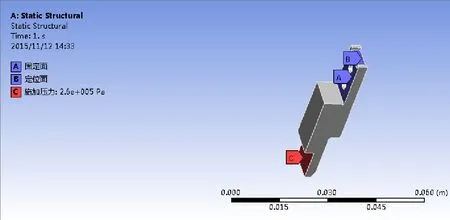
圖5 靜態結構圖

圖6 等效應力圖
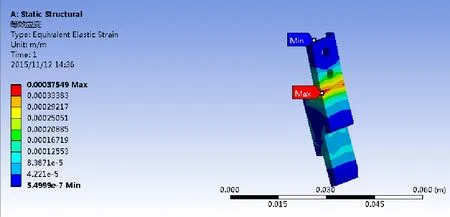
圖7 等效應變圖
經過ANSYS模擬受力分析,得到圖6所示等效應力圖和圖7所示等效應變圖。從圖6和圖7中可知,Max處為整個零件受力最大的部位和應變最大處,最大應力值為σmax=2.6459×107Pa,小于表1中所示的鋁合金的拉伸屈服強度和壓縮屈服強度2.8×108Pa,且安全系數達到10.5;最大應變值為εmax=3.7549×10-4m,在精度許可范圍內;彈性模量為7.1×1010Pa。Max處應力與應變的比值為:

符合廣義胡克定律,應力與應變之間是線性關系,所以材料處于彈性變形階段,不會產生塑性變形或斷裂破壞。
4 插裝功能的實現
如圖8所示,將抓手安裝在機器人上,設置坐標系來實現各點坐標的統。將兩夾片末端中心定義為抓手的執行點,測量各抓手執行點相對于抓手與機器人連接點的距離和角度,通過機器人控制器的定義工具功能來設置抓手執行點。然后設置坐標系原點,原點可以設置為機器人回零點,也可以設置為工作平面上方的任意點。再分別設置生產過程中的取料點和插裝點的坐標值,其中取料點坐標為固定值,來料由喂料器連續提供,插裝點坐標由抓手內部相機識別獲得,再由機器人試教糾偏,將所得坐標值存入計算機,供程序調用。
抓手的工作流程為:1)回原點,避免抓手到取料點的路徑上與工作平面上的元件相撞。2)取料,四個
【】【】
夾爪分別到各自的取料位取料,考慮到繞線的問題,先用對稱方向夾爪取料,再旋轉換夾爪,保證個方向的旋轉不超過180°。3)插裝,抓手先快速到達插裝點上方定距離,再用低速將元件插在電路板上,然后移動回插裝點上方,再快速到達下個插裝點。四個點都插裝好后回到原點。
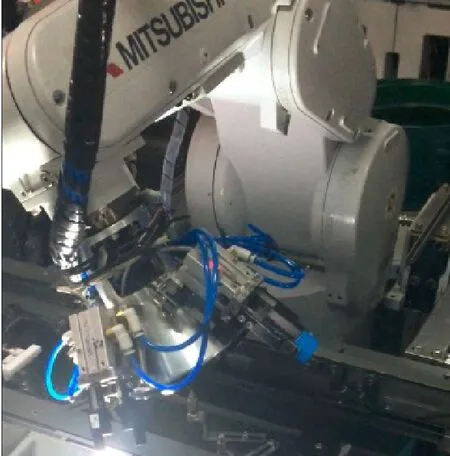
圖8 現場照片
5 結論
隨著自動化裝配在電子領域的應用越來越廣泛,與之相配套的末端執行器的設計需求將越來越迫切。本文給出了插裝機器人抓手的整體結構設計方案,根據工程實際需求,對夾爪支撐架和夾片進行了結構設計,并對抓手的受力部分進行了強度分析,保證在實際生產中的可靠性。最后,給出了抓手在插裝生產中的功能實現,證明了該抓手設計方案的可行性。
參考文獻:
[1] 劉文劍.工業機器人的設計與應用[M].黑龍江科學技術出版社.1990:23.
[3] 張國榮.用于機器人精密裝配的可變柔性手腕[J].江蘇機械制造自動化.1994(6):6-8.
[4] 彭商賢,金佐中.機器人柔順裝配機理研究[ J ] .機器人.1994,01(16,1):1-7.
[5] 《工業機械手》編寫組.工業機械手(上冊)機械機構[M].1978.12.
[6] 沈健.幾種常見的二指平動抓手的結構和特點[J].工藝與裝備.2005(12):86-88.
[7] 吳神麗,李洪穆,劉念聰.種新型工業機器人手部的設計與分析[M].現代制造技術與裝備.2008(6):7-9.
[8] 劉惟信.機械最優化設計[M].北京:清華大學出版社.1994.1.
作者簡介:王越(1990 -),女,黑龍江齊齊哈爾人,碩士研究生,研究方向為機電一體化。
收稿日期:2015-11-12
中圖分類號:TH122;TP241.2獻標識碼:B
文章編號:1009-0134(2016)03-0086-03