防繞擊避雷針裝卸機器人系統地面站控制軟件設計
2016-04-12 06:53:26Softwaredesignofstationcontrollerforlightninngrodagainstshieldingfailureinsulatingandremovingrobotsystem
制造業自動化 2016年3期
Software design of station controller for lightninng rod against shielding fail ureinsulating and removing robot system
程志勇1,2,郭 亮3,賈永剛1,2,郭 銳1,張 峰1,2
(1.國網山東省電力公司電力科學研究院,濟南 250002;2.山東魯能智能技術有限公司,濟南 250101;3.國網山東省電力公司,濟南 250001)
CHENG Zhi-yong1,2, GUO Liang3, JIA Yong-gang1,2, GUO Rui1, ZHANG Feng1,2
?
防繞擊避雷針裝卸機器人系統地面站控制軟件設計
Software design of station controller for lightninng rod against shielding fail ureinsulating and removing robot system
程志勇1,2,郭亮3,賈永剛1,2,郭銳1,張峰1,2
(1.國網山東省電力公司電力科學研究院,濟南 250002;2.山東魯能智能技術有限公司,濟南 250101;3.國網山東省電力公司,濟南 250001)
CHENG Zhi-yong1,2,GUO Liang3,JIA Yong-gang1,2,GUO Rui1,ZHANG Feng1,2
摘要:針對架空輸電線路防繞擊避雷針裝卸的需要,設計了由防繞擊避雷針機器人及地面站組成的自動裝卸機器人系統。搭建了由PC機、USB/RS232轉換器及無線通信單元組成的地面站控制系統硬件,在Win XP系統下采用SPCOMM控件和Turbodelphi Lite軟件設計了地面站控制軟件,自定義了簡潔的通信協議,在4800,8N1無線通信協議下進行了不同速度的自動安裝和自動拆卸實驗。結果表明,系統遙控距離超過1000米,無丟碼,機器人運動速度在0~50m/min范圍內連續可調。控制實驗證實了地面站控制軟件的可靠性和穩定性。
關鍵詞:USB/RS232轉換器;SPCOMM控件;Turbodelphi Lite軟件
0 引言
為提高輸電的安全性,開展了防繞擊避雷針裝卸技術的研究,研發了由地面站、防繞擊避雷針裝卸機器人組成的自動裝卸機器人系統。
本文以機器人系統安裝防繞擊避雷針為目標,研究地面站控制系統設計方法,并進行實驗驗證。
1 地面站控制系統硬件
地面站控制系統包括硬件及軟件兩部分。其中,硬件完成電平轉換及無線信號發送和接收功能。地面站硬件主要包括如下個部分。
1.1USB/RS232轉換模塊
1.2SM51高速無線數傳單元
用于實現信號調制及無線發送功能。其主要參數:工作電壓3.3V~5.5V,調制方式GFSK,發射頻率433MHz,發射功率-3dbm(500mW),最大接收靈敏度-132dbm,發射電流≤380mA,接收電流≤30mA,休眠電流≤5uA,喚醒時間≤1us。SM51通過RS232串口與UT-880 USB/RS232轉換器相連。
1.3433MHz吸盤天線
433MHz吸盤天線通過SMA接口與SM51高速無線數傳單元接收模塊相連,用于地面站與防繞擊避雷針裝卸機器人之間信號的增益接收和發送。
UT-880轉換器、SM51數傳單元與433MHz吸盤天線構成地面站與機器人間的信號通道。地面站發送的控制信號經筆記本PC USB串口、UT-880轉換器、SM51數傳單元、433MHz吸盤天線調制處理后發送至機器人。機器人的反饋數據調制后經433MHz吸盤天線、SM51數傳單元、UT-880轉換器及USB串口反饋給地面站PC。
2 地面站控制系統編程軟件
3 地面站控制系統軟件設計
3.1安裝SPCOMM控件
TurboDelphi未含MSCOMM通信控件,只能采用第方控件。本文采用免費的SPCOMM控件進行USB虛擬串口開發。
下載SPCOMM源代碼后,需按照如下順序進行安裝:
1)啟動TurboDelphi,注意右上側的ProjectGroup對話框。在ProjectGroup1.bpl名稱上右擊,在彈出的菜單中點擊“Rename”,名稱為SPCOMM,定義SPCOMM.BPL打包文件。
2)在SPCOMM.BPL上右擊,選擇彈出菜單上的“Add...",再選擇下載的spcomm.pas源碼文件。
3)點擊 ProjectGroup對話框上的Activate按鍵,激活這個打包文件和選擇的spcomm.pas文件。
4)右擊SPCOMM.BPL,在彈出的菜單中點擊“Install”,即完成SPCOMM控件的安裝。
3.2通信協議
為實現防繞擊避雷針裝卸機器人機載控制系統與地面站之間的通信,者除工作于相同的頻率和調制方式外(由SM51數傳單元確定),軟件上還需要采用致格式的通信協議。為簡化數據處理,采用8位數據格式,地面站發送給機器人的通信協議如表1所示。

表1 地面站至機器人控制指令協議
位0的R表示機器人。位1的1表示機器人編號,1為防繞擊避雷針裝卸機器人。位2至位4的CMD表示控制指令。位5的0表示指令開始。位7的X表示指令結束。位六的x表示不同的指令。例如,0為通信測試,1為壓緊,......,G為手提觸摸屏控制系統發送的速度減1指令信號。根據不同的功能,x在機器人控制系統中可能具有不同的含義。機器人發送給地面站的通信協議也采用8位數據格式,協議如表2所示。

表2 機器人至地面站反饋數據協議
與表1類似,位0的R表示機器人。位1的表示機器人編號,1為防繞擊避雷針裝卸機器人。位7的Y表示反饋數據的結束。位2至位6則有不同含義,分四種情況:
1)位2為D,位3為0,位5為O,位6為K,位4與表1位6相同的數字,則表示機器人報告地面站指令執行完畢。
2)位2為P,位3至位6則用于表示通過伺服驅動器監測到的與機器人前進或后退速度對應的脈沖數。
3)位2為V,位3至位6則用于表示通過機載控制系統監測到的與驅動電池電壓對應的10位二進制數據(與機載控制系統Atmega128A MCU 10位A/D功能對應)。
4)位2為L,位3至位6則用于表示通過機載控制系統監測到的與導線傾角對應的10位二進制數據(與機載控制系統Atmega128A MCU 10位A/D功能對應)。
3.3功能設計
根據防繞擊避雷針裝卸機器人需要完成的功能,地面站控制系統需要具有如下功能:
1)串口相關功能
也就是UT-880 USB/RS232轉換器虛擬出來的串口(般為COM4)設定問題,尤其是開關控制、波特率、數據位、起始位、停止位、奇偶校驗、緩沖區、接收函數設定等。其中,波特率、數據位、起始位、停止位、奇偶校驗等需與SM51串口參數致,以實現串口參數匹配和二者間的數據交換。
2)防繞擊避雷針裝卸機器人運動控制
為實現靈活和解耦控制,將防繞擊避雷針裝卸機器人運動控制分解為壓緊、行走速度調節與控制、運動方向控制(前進/后退)、開始運動、停止運動、緊固防繞擊避雷針、拆卸防繞擊避雷針、檢測使能及檢測禁止等獨立功能,通信協議如表1所示。
3)反饋數據處理
按表2所示,對接收到的數據進行處理并顯示防繞擊避雷針裝卸機器人的當前運動速度、驅動電池當前電壓、導線當前傾角等。
3.4界面設計
根據地面站控制系統功能設計,與串口打開、關閉、波特率設定、起始位設定、數據位設定、奇偶校驗相關的功能使用個GroupBox組合在起,與防繞擊避雷針裝卸機器人相關的功能分別使用個GroupBox組合在起以增強易用性。
3.5軟件代碼設計
1)串口操作
Comm1有眾多屬性。其中,最為關鍵的是Comm1控件屬性的設定及接收程序的編寫。
在Comm1控件屬性中,較為重要的是CommName(串口名稱)、BaudRate(波特率)、ByteSize(數據位)、Parity(奇偶校驗方式)、ParityCheck(是否奇偶校驗)、PortOpen(是否打開)、StopBits(停止位),分別設置如下:
Comm1.CommName:=COM4; //如果是計算機原生串口,則是COM1
Comm1.BaudRate:=4800;
Comm1.ByteSize: =8;
Comm1.Parity: =None;
Comm1.ParityCheck: =False;
Comm1.PortOpen:=False;//默認關閉
Comm1.StopBits=1;
這些屬性可由相應的ComboBox控件選擇和設定。
點擊“打開串口”按鍵,打開COM4串口的指令為:
Comm1.PortOpen:=True;
點擊“關閉串口”按鍵,關閉COM4串口的指令為:
Comm1.PortOpen:= False;
為與SM51串口協議相對應,UT-880虛擬出來的串口參數設置為4800,8N1。
2)指令發送
指令發送就是點擊相應按鍵后,按照如表1所示協議向機器人發送指令數據的過程,可通過將指令數據寫入Comm1控件Output屬性的方法實現。
例如,向防繞擊避雷針裝卸機器人發送通信測試指令的代碼是
Comm1.Output:=’R1CMD00Y’;
3)反饋數據處理
SPCOMM控件是采用線程技術編程和實現的,可采用線程方法對機器人反饋給地面站的反饋數據進行處理并顯示的過程和技術。
SPCOMM控件的接收軟件代碼較為復雜。點擊SPCOMM控件,在屬性框中點擊Event選項卡,新建DatRCV事件。
inBuff:array[0..10] of char;
讀取緩沖區數據的代碼是:
Move(Buffer,inBuff,bufferlength);
參見表2,在反饋數據處理的DatRCV事件框架內,處理反饋數據的流程圖如圖1所示。
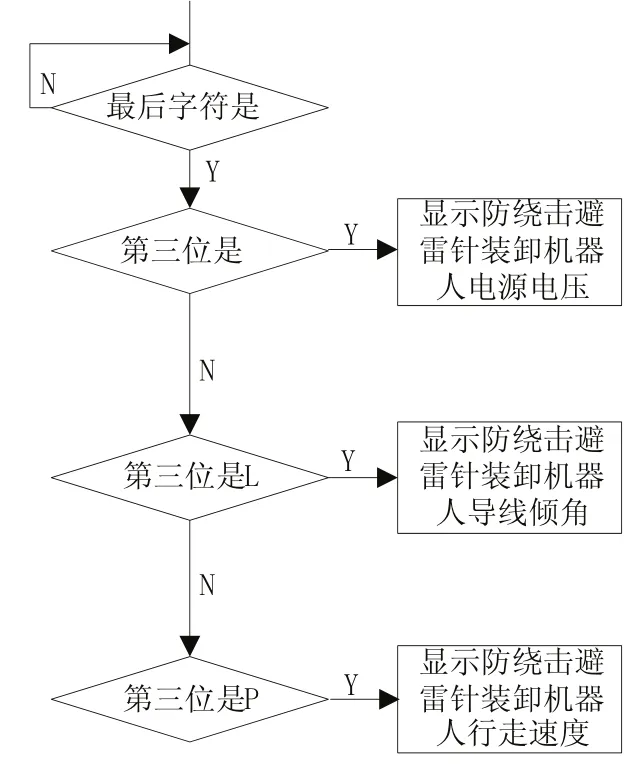
圖1 反饋數據處理流程圖
if AnsiSameStr(lastchar,'X') then
//處理語句
tmpstrid:=Copy(RcvData,3,1); //獲得第個字符
if (SameText(tmpstrid,'P'))
//處理語句
根據不同的反饋數據,循環使用這些語句即可得到防繞擊避雷針裝卸機器人的驅動電池電壓、運行速度及導線傾角等當前參數。
4 地面站控制實驗
操作系統為Win XP sp3。將UT-880轉換器插入任USB接口,安裝驅動程序。在桌面“我的電腦”圖標上右擊,在彈出的“系統屬性”對話框中選擇“硬件”選項卡,在“設備管理器”框架中點擊“設備管理器”按鍵,系統彈出“設備管理器”對話框。右擊“端口(COM和LPT)”下的“通信端口(COM4)”,在彈出的COM4端口屬性設置對話框內,將通信協議設置為4800,8N1。
使用本文設計的控制系統在GJ-90架空電力線上進行了機器人安裝防繞擊避雷針實驗。機器人將防繞擊避雷針推送至目標位置,并進行緊固,如圖2所示。機器人將防繞擊避雷針安裝完畢后退回,如圖3所示。
結果表明,1)系統遙控距離超過1000米,無丟碼;2)機器人行走運動速度在0~50m/min范圍內連續
【】【】可調,實現了機器人拖動防繞擊避雷針前進、后退、緊固防繞擊避雷針、緊固后退回等功能控制,及10位分辨率的速度、驅動電池電壓及導線傾角檢測,圓滿達到實驗效果。
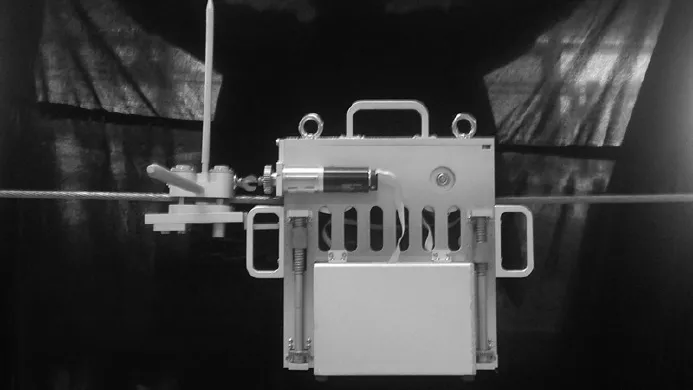
圖2 機器人安裝防繞擊避雷針

圖3 機器人安裝防繞擊避雷針后退回
5 結束語
本文設計了由防繞擊避雷針裝卸機器人及地面站組成的防繞擊避雷針裝卸系統以實現架空輸電線路防繞擊避雷針裝卸作業。搭建了由PC機、UT-880 USB/RS232轉換器及SM51高速無線通信單元組成的地面站控制系統硬件,采用Turbodelphi Lite軟件和SPCOMM控件設計了地面站控制軟件,設計了地面站至機器人系統及機器人系統至地面站的8位格式的通信協議,在4800,8N1無線通信協議下進行了防繞擊避雷針安裝實驗。實驗結果證實了地面站控制軟件的可靠性和穩定性。
參考文獻:
[1] Paul Kimmel.Delphi 6應用開發指南[M].郭旭,周建明,譯.北京:清華大學出版社,2002.
[2] 龍啟明,劉斌,程捷.Delphi 7高級編程范例[M].北京:清華大學出版社,2004.
[3] 伍俊良.Delphi 6控件應用實例教程[M].北京:北京希望電子出版社,2002.
[4] 張志遠,畢海深,趙寶光.種全自動軟袋物料再包裝生產線的設計[J].制造業自動化,2013,35(2):128-131.
[5] 許松清,吳海彬,林宜,等.基于DSP的半自主遠程控制移動機器人系統[J].單片機與嵌入式系統應用,2005(8):58-60,70.
[6] 方鵬程,胡征峰,補家武.移動機器人無線通訊擴展[J].微計算機信息,2003,19(11):74-75.
[7] 謝振宇.電纜隧道綜合檢測機器人控制系統研究[D].上海:上海交通大學,2008.
[8] 莊嚴,刑睿智,王偉.XO/2實時操作系統在嵌入式移動機器人中的應用[J].中南大學學報,2005,36(1):359-364.
作者簡介:程志勇(1986 -),男,工程師,碩士,研究方向為電力機器人控制系統設計。
收稿日期:2015-12-04
中圖分類號:TP373
文獻標識碼:A
文章編號:1009-0134(2016)03-0094-04