I2C總線擴(kuò)展在數(shù)字時(shí)統(tǒng)微波通信系統(tǒng)中的應(yīng)用*
2016-04-15 08:20:02馬力
艦船電子工程 2016年3期
馬 力
(海軍駐揚(yáng)州723所軍事代表室 揚(yáng)州 225001)
?
I2C總線擴(kuò)展在數(shù)字時(shí)統(tǒng)微波通信系統(tǒng)中的應(yīng)用*
馬力
(海軍駐揚(yáng)州723所軍事代表室揚(yáng)州225001)
摘要數(shù)字時(shí)統(tǒng)微波傳輸系統(tǒng)主要用于主站到從站之間時(shí)統(tǒng)、數(shù)據(jù)、話音信號(hào)等綜合業(yè)務(wù)的雙向視距傳輸。設(shè)備中監(jiān)控模塊實(shí)現(xiàn)了參數(shù)設(shè)置、參數(shù)預(yù)覽、故障告警、故障查詢等BIT功能,為了滿足整個(gè)設(shè)備可靠性高、組合靈活、設(shè)備簡(jiǎn)單等要求,監(jiān)控模塊采用I2C總線擴(kuò)展的設(shè)計(jì)原則,用兩根線實(shí)現(xiàn)了對(duì)各個(gè)功能單元的監(jiān)視和控制,大大提高了工作效率和可靠性。
關(guān)鍵詞數(shù)字時(shí)統(tǒng); 監(jiān)控; I2C總線擴(kuò)展
Application of I2C Bus Expansion in Digital Time System Microwave Transformission
MA Li
(Naval Representative Office in 723 Institute of CSIC, Yangzhou225001)
AbstractDigital time system microwave transformission is mainly applied for time system, data, voice signal between master station and slave station in horizon bidirectional transmission. Parameter setting, parameters preview, fault alarm and alarm query functions are realized by montoring module in equipment. To satisfy requirment of high reliability, flexible combination and simplified device, I2C Bus expansion principle is adopted in the design. The two lines are performed monitoring and control for each function unit. It can greatly improve the efficiency and reliaility.
Key Wordsdigital time system, montoring module, I2C bus expansion
Class NumberTP273
1引言
現(xiàn)代高技術(shù)條件下的戰(zhàn)爭(zhēng)中,為了提高系統(tǒng)在電子戰(zhàn)環(huán)境下的生存能力,越來越強(qiáng)調(diào)軍事電子系統(tǒng)隱蔽探測(cè)和精確打擊,無源定位技術(shù)為隱蔽探測(cè)和精確打擊提供了十分重要的手段。
無源定位的特點(diǎn)是不向被定位目標(biāo)發(fā)射電磁信號(hào),通過目標(biāo)發(fā)射的信號(hào)或者其發(fā)射信號(hào)來進(jìn)行定位,一般需要多站協(xié)同工作[1~2],系統(tǒng)經(jīng)過復(fù)雜的計(jì)算獲得目標(biāo)的位置。無源定位按照定位方法或體制可以分為:測(cè)向交叉定位、時(shí)差定位法和測(cè)向/時(shí)差混合定位法三種[3],測(cè)向交叉定位指通過機(jī)載或地面單站的移動(dòng),在不同位置多次測(cè)量方位,利用方位線的交會(huì)來實(shí)現(xiàn)定位;時(shí)差定位通過處理三站或更多測(cè)量站采集到的信號(hào)到達(dá)時(shí)間來進(jìn)行定位的;測(cè)向/時(shí)差混合定位是將多站無源測(cè)向定位和時(shí)差定位相結(jié)合的一種定位方法,即可保證時(shí)差定位的高精度,又可利用方位角信息消除定位的模糊性。
無源定位的定位精度取決于時(shí)差的測(cè)量精度,為了高精度測(cè)量時(shí)差,需要一個(gè)時(shí)統(tǒng)設(shè)備來同步各個(gè)站的時(shí)間,數(shù)字時(shí)統(tǒng)指通過數(shù)字方式來同步各個(gè)站[4~5],根據(jù)測(cè)量站的距離遠(yuǎn)近可以有線控和微波通信兩種方式。
2數(shù)字時(shí)統(tǒng)微波通信系統(tǒng)[6~7]
數(shù)字時(shí)統(tǒng)微波通信系統(tǒng)由一個(gè)主站和若干從站組成,主站和從站都包括了時(shí)統(tǒng)通信射頻、中頻、終端和GPS或者北斗時(shí)鐘設(shè)備。以兩個(gè)從站為例,其系統(tǒng)組成框圖如圖1所示。
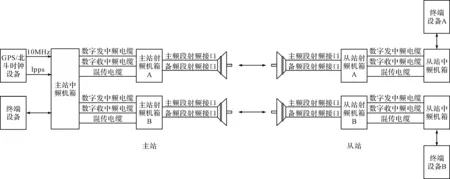
圖1 數(shù)字時(shí)統(tǒng)微波通信系統(tǒng)組成框圖
其中終端設(shè)備完成數(shù)據(jù)、話音等信號(hào)的接口變換、復(fù)分接處理等功能;中頻設(shè)備完成基帶信號(hào)的調(diào)制和解調(diào)、LDPC糾錯(cuò)編譯碼,時(shí)統(tǒng)信息的處理,并對(duì)信道及終端、中頻、射頻設(shè)備的工作參數(shù)和工作狀態(tài)進(jìn)行設(shè)置和監(jiān)控;射頻設(shè)備主要完成射頻信號(hào)的發(fā)射與接收,中頻與射頻信號(hào)的轉(zhuǎn)換等功能;GPS/北斗時(shí)鐘設(shè)備通過接收衛(wèi)星導(dǎo)航信號(hào),馴服本地高穩(wěn)頻頻率源(銣鐘),使本地1pps頻標(biāo)信號(hào)與參考授時(shí)信號(hào)達(dá)到同步。
設(shè)備中監(jiān)控模塊實(shí)現(xiàn)了對(duì)終端設(shè)備中復(fù)接、PCM編譯碼、語音交換和分接的控制;對(duì)中頻設(shè)備中數(shù)字上變頻器的數(shù)字鎖相環(huán)的參數(shù)設(shè)置,對(duì)時(shí)統(tǒng)處理單元銣鐘的相位調(diào)整;對(duì)射頻設(shè)備中數(shù)字下變頻器的數(shù)字鎖相環(huán)的參數(shù)設(shè)置,對(duì)自環(huán)器中的參數(shù)設(shè)置;還要對(duì)系統(tǒng)各功能單元進(jìn)行狀態(tài)監(jiān)測(cè)、故障告警等BIT功能。其接口設(shè)備多,時(shí)序復(fù)雜,按照傳統(tǒng)點(diǎn)對(duì)點(diǎn)監(jiān)控的方式,需要有多個(gè)接口控制器和接口板,每個(gè)功能模塊獨(dú)立監(jiān)控,增加了調(diào)試難度和設(shè)備的復(fù)雜度。
3I2C擴(kuò)展總線在監(jiān)控模塊中的應(yīng)用
I2C總線是由PHILIPS公司開發(fā)的兩線式串行總線,用于連接微控制器及其外圍設(shè)備。是微電子通信控制領(lǐng)域廣泛采用的一種總線標(biāo)準(zhǔn)。它是同步通信的一種特殊形式,具有接口線少,控制方式簡(jiǎn)單,器件封裝形式小,通信速率較高等優(yōu)點(diǎn)。I2C總線支持任何IC生產(chǎn)過程(CMOS、雙極性)。通過串行數(shù)據(jù)(SDA)線和串行時(shí)鐘(SCL)線在連接到總線的器件間傳遞信息。每個(gè)器件都有一個(gè)唯一的地址識(shí)別(無論是微控制器——MCU、LCD驅(qū)動(dòng)器、存儲(chǔ)器或鍵盤接口),而且都可以作為一個(gè)發(fā)送器或接收器[8~9]。
PCF8574通過兩條雙向總線(I2C)可使大多數(shù)MCU實(shí)現(xiàn)遠(yuǎn)程I/O口擴(kuò)展。該器件包含一個(gè)8位準(zhǔn)雙向口和一個(gè)I2C總線接口。PCF8574電流消耗很低,且口輸出鎖存具有大電流驅(qū)動(dòng)能力,可直接驅(qū)動(dòng)LED。它還帶有一條中斷接線(INT)可與MCU的中斷邏輯相連。通過INT發(fā)送中斷信號(hào),遠(yuǎn)端I/O口不必經(jīng)過I2C總線通信就可通知MCU是否有數(shù)據(jù)從端口輸入。這意味著PCF8574可以作為一個(gè)單被控器[10]。其功能框圖如圖2所示。
通過PCF8574的擴(kuò)展可以方便與各個(gè)功能單元進(jìn)行接口,簡(jiǎn)化了監(jiān)控模塊的設(shè)計(jì)復(fù)雜度。同I2C一樣,采用一條數(shù)據(jù)線(SDA),加一條時(shí)鐘線(SCL)來完成數(shù)據(jù)的傳輸及外圍器件的擴(kuò)展;對(duì)各個(gè)節(jié)點(diǎn)的尋址是軟尋址方式,節(jié)省了片選線,在傳輸數(shù)據(jù)的時(shí)候,SDA線必須在時(shí)鐘的高電平周期保持穩(wěn)定,SDA的高或低電平狀態(tài)只有在SCL線的時(shí)鐘信號(hào)是低電平時(shí)才能改變。SCL線是高電平時(shí),SDA線從高電平向低電平切換,這個(gè)情況表示起始條件;SCL線是高電平時(shí),SDA線由低電平向高電平切換,這個(gè)情況表示停止條件。
PCF8574的寫端口時(shí)序和讀端口時(shí)序如下圖,每個(gè)PCF8574可以擴(kuò)展8數(shù)據(jù)位,多個(gè)PCF8574可以并聯(lián),實(shí)現(xiàn)更多的數(shù)據(jù)位擴(kuò)展[11~12]。
以上變頻器中頻率鎖相源為例,通過I2C總線擴(kuò)展對(duì)鎖相源進(jìn)行設(shè)置。鎖相源采用的是RFMD公司的PNP-1500-P22,其功能框圖如圖5所示。
PNP-1500-P22為即插即用寬帶頻合器,內(nèi)置微處理器,SPI總線接口,可以設(shè)置掃頻/點(diǎn)頻模式,輸出頻率范圍1000MHz~2000MHz。SPI也是一種串行外圍設(shè)備接口,其特點(diǎn)是高速,全雙工,同步。SPI是一個(gè)環(huán)形總線結(jié)構(gòu),占用四根線由ss(cs)、sck、sdi、sdo構(gòu)成,其時(shí)序主要是在sck的控制下,兩個(gè)雙向移位寄存器進(jìn)行數(shù)據(jù)交換。上升沿發(fā)送、下降沿接收、高位先發(fā)送。上升沿到來的時(shí)候,sdo上的電平將被發(fā)送到從設(shè)備的寄存器中。下降沿到來的時(shí)候,sdi上的電平將被接收到主設(shè)備的寄存器中[13]。
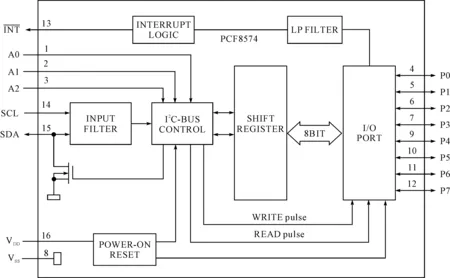
圖2 PCF8574功能框圖

圖3 PCF8574寫時(shí)序

圖4 PCF8574讀時(shí)序
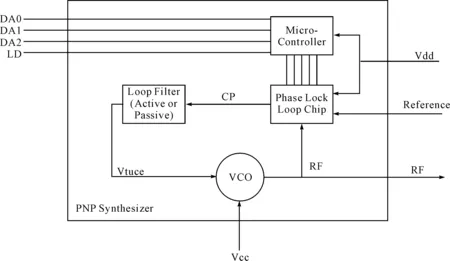
圖5 鎖相源PNP-1500-P22功能框圖
而PCF8574的前端接口是I2C,需要將PCF8574輸出8位總線模擬出SPI總線,就能對(duì)PNP-1500-P22進(jìn)行控制了。PCF8574的電路設(shè)計(jì)和PNP-1500-P22的硬件接口電路設(shè)計(jì)分別如圖6、圖7所示。
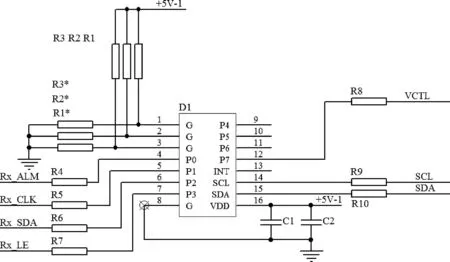
圖6 PCF8574電路圖
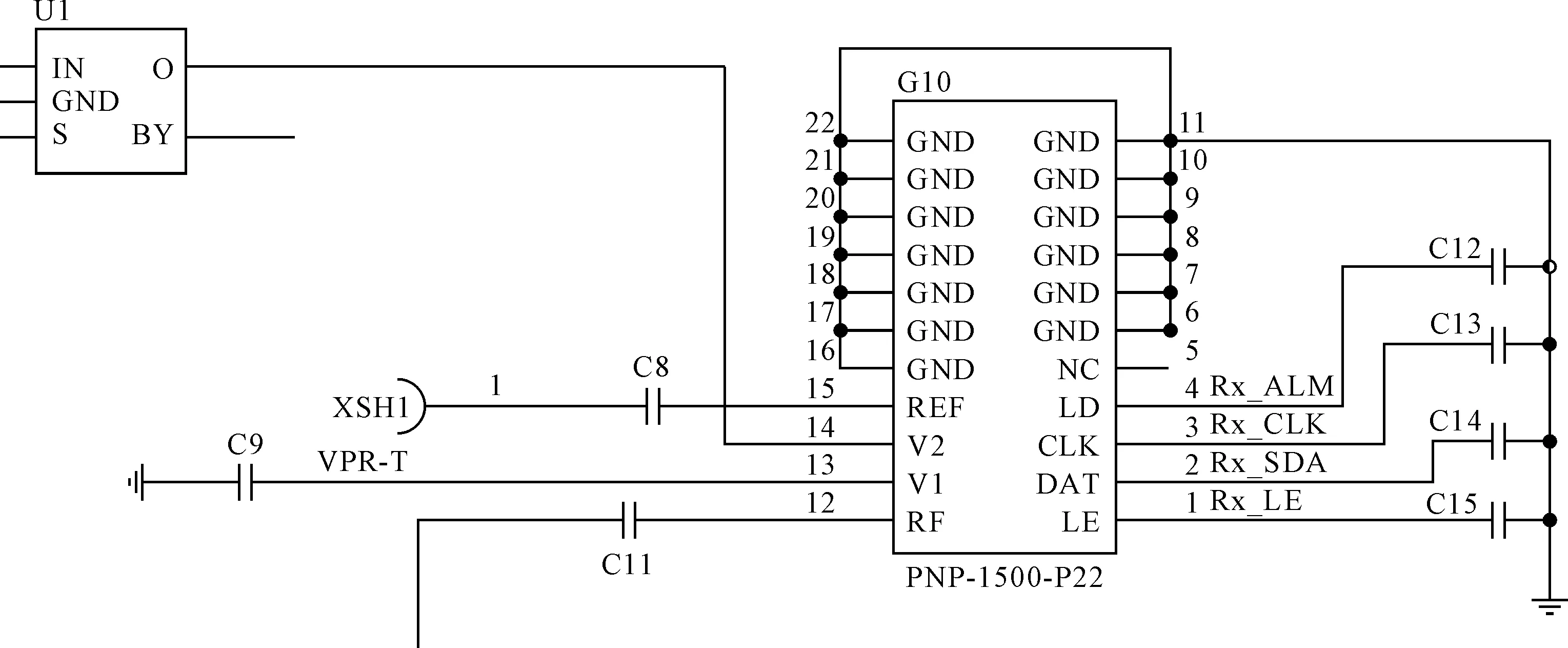
圖7 PNP-1500-P22電路圖
其中PCF8574的P0,P1,P2,P3分別對(duì)應(yīng)了PNP-1500-P22的鎖相信號(hào)、時(shí)鐘信號(hào)、數(shù)據(jù)位和鎖存信號(hào)。
在軟件設(shè)計(jì)時(shí),使用PCF8574來控制PNP-1500-P22,需按照I2C時(shí)序?qū)CF8574的字節(jié)寫操作的子程序如下:
void I2C_ByteWrite_8574(u8 addr,u8 dat)
{
/* 起始位 */
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
/* 發(fā)送器件地址(寫)*/
I2C_Send7bitAddress(I2C1, addr, I2C_Direction_Transmitter);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/* 寫一個(gè)字節(jié)*/
I2C_SendData(I2C1, dat);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
/* 停止位*/
I2C_Standby_24C();
}
對(duì)PCF8574進(jìn)行讀操作的子程序如下:
void I2C_ReadS_8574(u8 addr ,u8* pBuffer,u16 no)
{
if(no==0)return;
while(I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY));
/*允許1字節(jié)1應(yīng)答模式*/
I2C_AcknowledgeConfig(I2C1, ENABLE);
/* 發(fā)送起始位 */
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));/*EV5,主模式*/
/*發(fā)送器件地址(寫)*/
I2C_Send7bitAddress(I2C1, addr, I2C_Direction_Transmitter);
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
/*起始位*/
I2C_GenerateSTART(I2C1, ENABLE);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
/*器件讀*/
I2C_Send7bitAddress(I2C1, (addr+1), I2C_Direction_Receiver);
while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
while (no)
{
if(no==1)
{
I2C_AcknowledgeConfig(I2C1, DISABLE);//最后一位后要關(guān)閉應(yīng)答的
I2C_GenerateSTOP(I2C1, ENABLE);//發(fā)送停止位
}
if(I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_RECEIVED)); /* EV7 */
{
delay1(20);
*pBuffer = I2C_ReceiveData(I2C1);
pBuffer++;
/* Decrement the read bytes counter */
no--;
delay1(20);
}
}
//再次允許應(yīng)答模式
I2C_AcknowledgeConfig(I2C1, ENABLE);
}
經(jīng)過驗(yàn)證,通過擴(kuò)展I2C總線,能夠模擬SPI總線實(shí)現(xiàn)對(duì)頻合器的監(jiān)控,同樣對(duì)其他功能單元也能進(jìn)行監(jiān)控,簡(jiǎn)化了印制板的設(shè)計(jì)難度,最終監(jiān)控模塊全部集成到中頻機(jī)箱中,用一個(gè)母板,兩根數(shù)據(jù)線完成所有功能單元的監(jiān)控。
4結(jié)語
通過I2C總線擴(kuò)展設(shè)計(jì),用兩根線實(shí)現(xiàn)了對(duì)各個(gè)功能單元的監(jiān)視和控制,大大簡(jiǎn)化了數(shù)字時(shí)統(tǒng)微波通信系統(tǒng)設(shè)備的接口設(shè)計(jì),便于模塊化設(shè)計(jì),大大提高了工作效率,增加了系統(tǒng)的可靠性。
參 考 文 獻(xiàn)
[1] 孫正波,余鍵.無源相干定位淺析[J].電信技術(shù)研究,2000(8):1-9.
[2] 張軍華.“靜默哨兵”一種新型無源反隱身雷達(dá)[J].現(xiàn)代防御技術(shù),2000(1):63-64.
[3] 孫仲康,周一宇.單多基地有源無源定位技術(shù)[M].北京:國(guó)防工業(yè)出版社,1996.
[4] 李華.二維時(shí)差估計(jì)定位技術(shù)[J].電子對(duì)抗,1998(2):24-32.
[5] 羅景青.空間時(shí)差定位系統(tǒng)的精度分析[J].電子對(duì)抗,1985(3):10-18.
[6] 童寶潤(rùn).時(shí)間統(tǒng)一技術(shù)[M].北京:國(guó)防工業(yè)出版社,2004:3,196.
[7] 漆貫榮.時(shí)間科學(xué)基礎(chǔ)[M].北京:高等教育出版社,2006:92.
[8] 何立民.I2C總線應(yīng)用系統(tǒng)設(shè)計(jì)[M].北京:北京航空航天大學(xué)出版社,1995.
[9] Semiconductor P. The I2C Bus Specification[J/OL]. 2000. http://www.semiconductors.philips.com/acrobat/various/I2C_BUS_SPECIFICATION_3.pdf.
[10] 周立功.I2C總線概要:產(chǎn)品應(yīng)用手冊(cè)[M].廣州:廣州周立功單片機(jī)發(fā)展有限公司,2006.
[11] 周立功.I2C總線8位遠(yuǎn)程I/O擴(kuò)展口芯片PCF8574的原理與應(yīng)用[M].廣州:廣州周立功單片機(jī)發(fā)展有限公司,2006.
[12] 朱明榮,汪立森.I2C總線I/O器件PCF8574的原理與應(yīng)用[J].電子技術(shù)應(yīng)用,1994,12:30-33
[13] RFMD. PNP-1500-P22-G Datasheet[OL]. www.rfmd.com.
中圖分類號(hào)TP273
DOI:10.3969/j.issn.1672-9730.2016.03.004
作者簡(jiǎn)介:馬力,男,碩士,工程師,研究方向:雷達(dá)對(duì)抗。
收稿日期:2015年9月11日,修回日期:2015年10月30日