魚雷彈道定位精度仿真研究*
2016-04-15 08:20:04李韋華張世海馬錦垠
艦船電子工程 2016年3期
陸 揚 李韋華 張世海 馬錦垠
(91439部隊 大連 116041)
?
魚雷彈道定位精度仿真研究*
陸揚李韋華張世海馬錦垠
(91439部隊大連116041)
摘要針對現有試驗中水聲測量裝備定位精度無法評估,現有的水聲測量裝備標稱的定位精度總是與當時水文條件相關的問題,論文利用仿真的方法對水聲測量裝備的定位精度進行了仿真評估,為試驗的數據處理提供依據。
關鍵詞水聲測量; 魚雷; 定位; 高斯分布
Simulation Study on the Ballistic Trajectory of Torpedo
LU YangLI WeihuaZHANG ShihaiMA Jinyin
(No. 91439 Troops of PLA, Dalian116041)
AbstractAccording to existing problems in the measurement of underwater acoustic measurement equipment, and the accuracy of the existing underwater acoustic measurement equipment is always related to the hydrological conditions, this paper uses the method of simulation to evaluate the accuracy of underwater acoustic measurement equipment.
Key Wordsacoustic measurement, torpedo, localization, Gauss distribution
Class NumberTJ630.6
1引言
長期以來,水聲測量在魚雷試驗中發揮了重要作用,提供了大量的試驗數據,實現了水下試驗的可視化,保障了試驗的安全實施。但由于水聲環境的復雜性,導致目標定位的不確定性,或者說產生冗余數據,水聲測量產生的試驗數據對裝備定型結果報告的貢獻率較低,甚至有些裝備的定型結果報告就以內記數據為準,水聲測量裝備產生的數據僅用于參考[1],分析產生這種現象的主要原因,在于水聲測量裝備的定位精度與試驗環境特別是水文條件相關性較大,針對特定條次的定位精度無法從理論上進行定量,因此,有必要進行系統研究,以解決試驗中水聲測量裝備定位精度的評估問題。現有的水聲測量裝備標稱的定位精度其實是與驗收時的水文條件相關的,直接將標稱的定位精度引用到試驗中應該說是不準確的[2],本文利用仿真的方法對水聲測量裝備的定位精度進行了仿真評估,為試驗的數據處理提供依據[3]。
2魚雷彈道定位精度評估方法
為了考察目標復雜航路對數據處理方法的影響,不妨設計成典型的魚雷彈道形式,設置10m系統誤差仿真產生測量數據,如圖1所示。
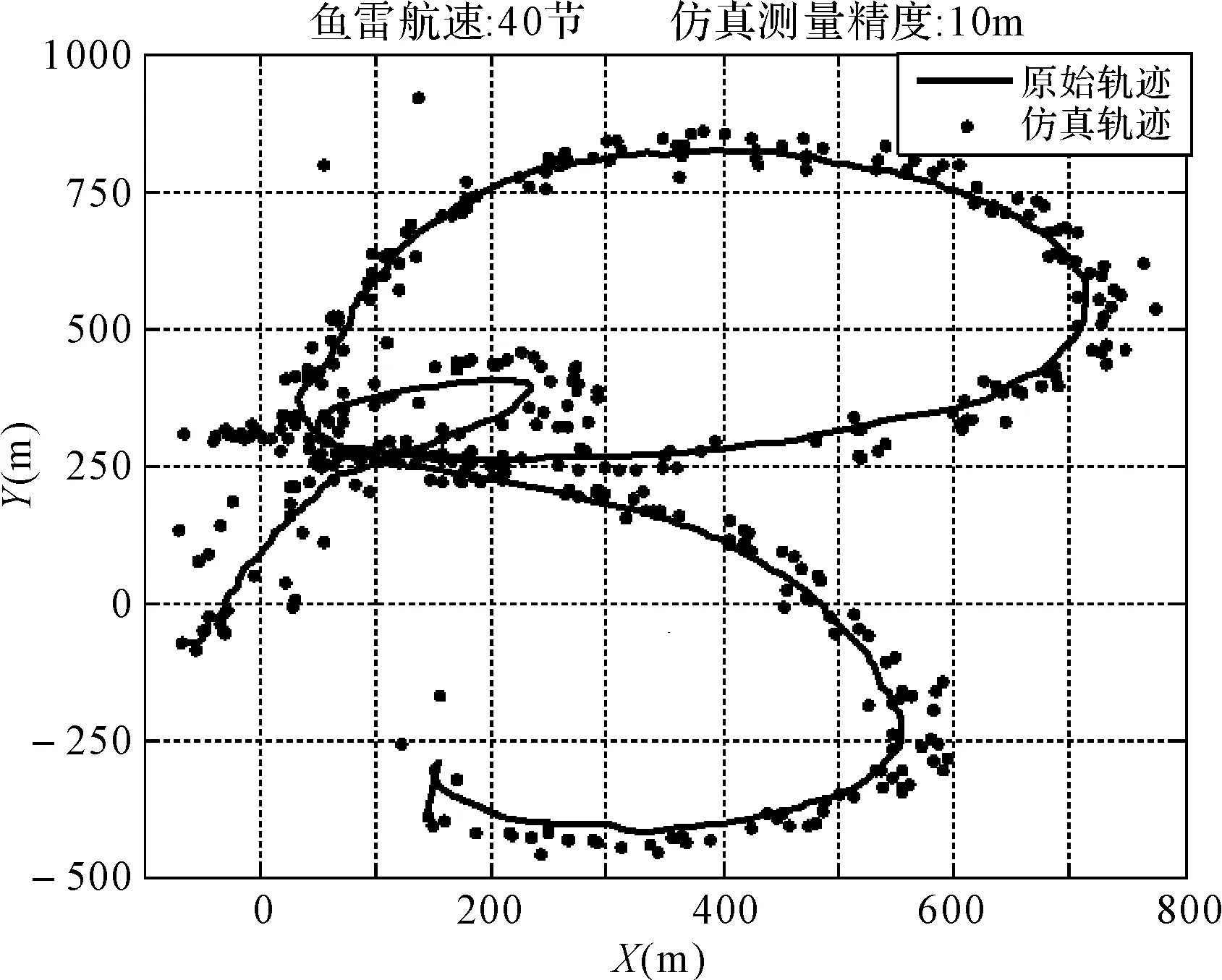
圖1 魚雷彈道仿真
2.1誤差分布檢驗
將測量數據進行三階最小二乘擬合,擬合平滑數據假定為真值,測量數據按照時間序列對應關系減去平滑真值,簡稱平直數據。爾后,對平直數據作頻數直方圖,借以判斷測量誤差的概率分布規律。對前述仿真的數據進行處理,如圖2所示,可以判斷為高斯分布,與仿真設置條件相符。
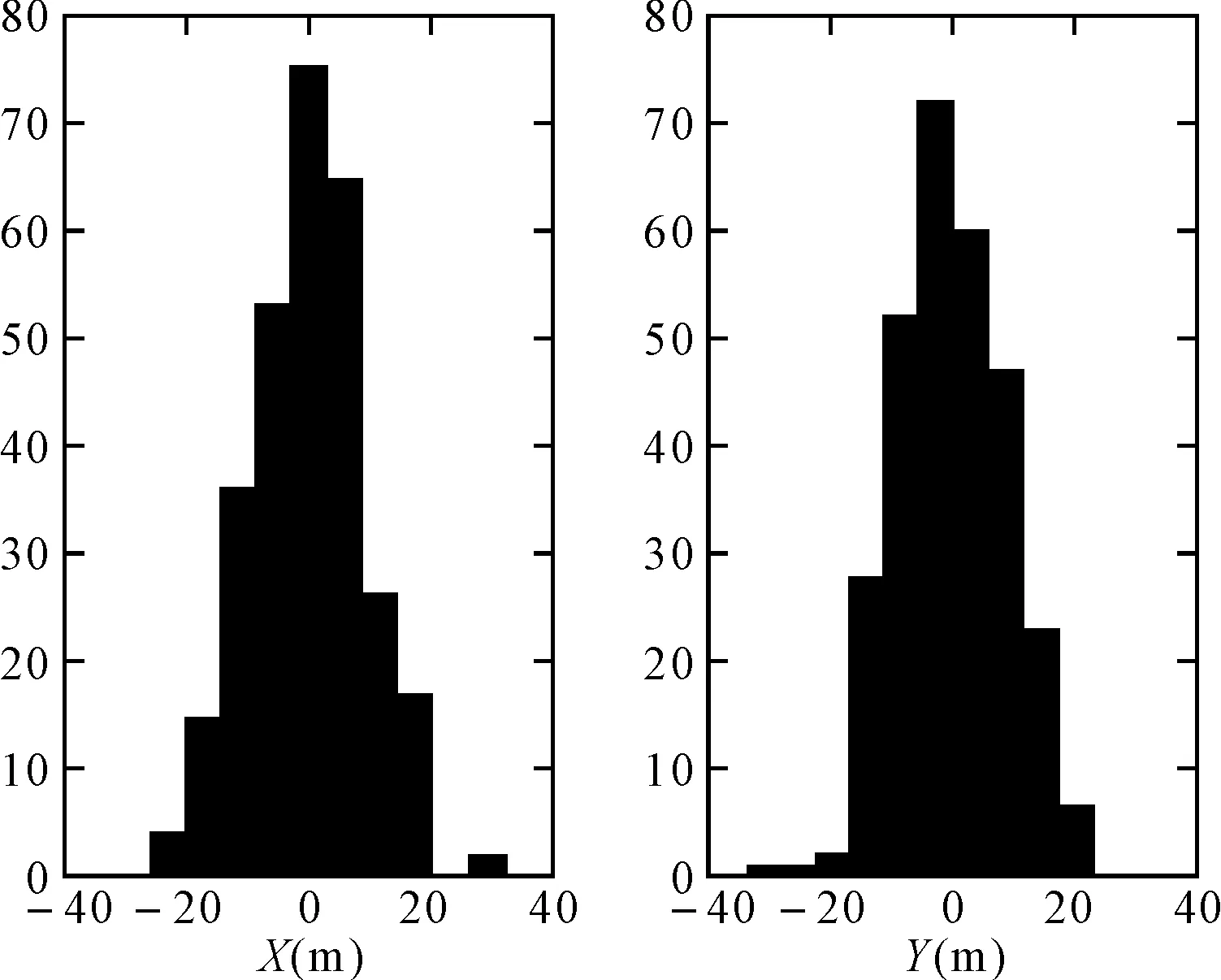
圖2 平直數據頻數直方圖
這里假定了測量誤差是平穩的或者是緩慢平穩的。對于統計量基本平穩的一個時間段,測量數據越多,分布檢驗的準確性越高。而分布檢驗的結論,對于后續的數據處理與置信分析是十分重要的。
2.2精度檢定
將平直數據統計其標準差,由于平值數據的誤差分布服從正態規律,因此上界與下界分別設置為標準差的±4倍,凡超出邊界的數據即判為野值,實際應用中需給予線性插值[4~5]。
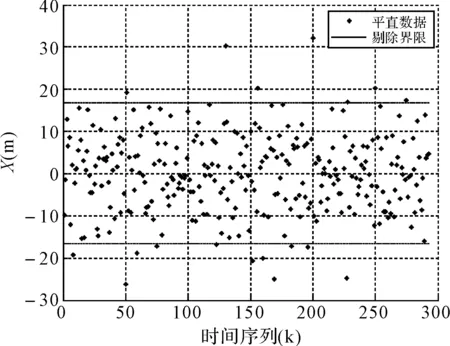
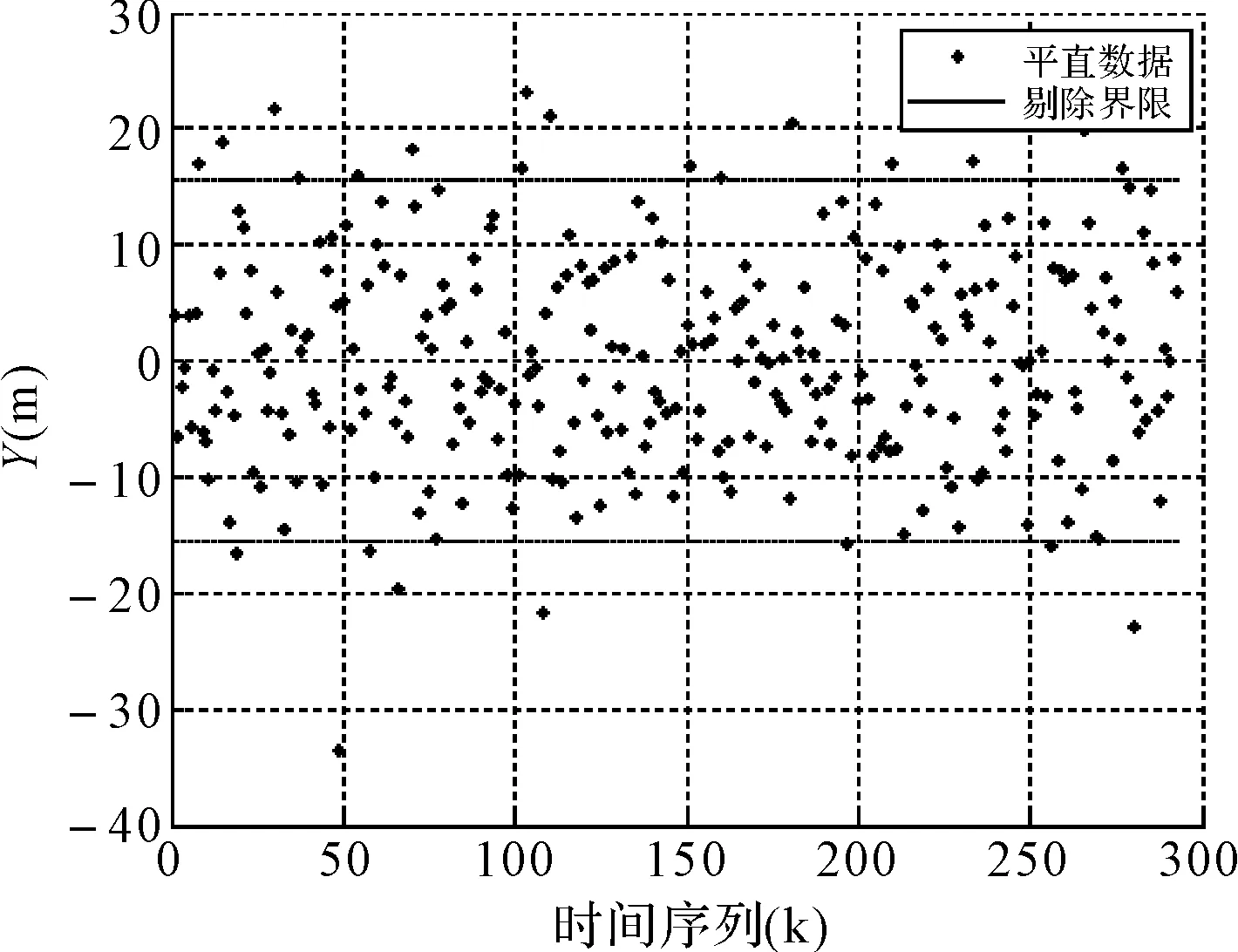
圖3 平直數據的野值剔除示意圖
剔除野值后重新統計標準差亦稱檢定精度,是對測量精度指標的一種估值。為了觀察精度檢定的效果,將仿真數據精度與檢定精度進行比較,統一列于表1。共做了五組仿真測試,可以發現,檢定精度偏小,但基本可以代表實際精度。顯然,用平直數據對定位數據的測量精度做出檢定,還需要回答置信區間與置信度的問題[6~7]。
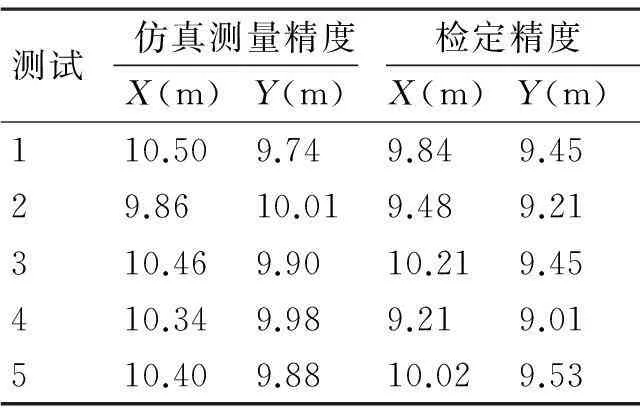
表1 精度檢定效果比較
2.3置信分析
根據誤差分布檢驗的結論設置仿真數據的概率分布,以原始精度為基準,采用仿真方法統計置信區間與置信度。具體做法如下: 1) 統計測量數據的檢定精度; 2) 該檢定精度作為仿真數據標準差,以檢驗分布為基礎,分別對X、Y時間序列進行裝訂并仿真; 3) 對裝訂的仿真數據統計標準差,并給出檢定的標準差; 4) 記錄檢定精度標準差與裝訂標準差的差值; 5) 重復上述兩個步驟,共獲得不少于1000個差值,畫出頻數直方圖; 6) 按80%的置信度,對頻數直方圖進行分析,確定相應的置信區間。
如圖4給出了差值的頻數直方圖,發現檢定精度為有偏估計,而檢定精度小于測量精度,緣于平滑數據與測量數據的相關性。取置信度為80%,X檢定的置信區間為[-0.69m,-0.51m],Y檢定的置信區間為[-0.72m,-0.48m]。依此得出具體結論:檢定精度作為實際測量精度的估值,以實際精度為基準,X檢定落在置信區間[-0.69m,-0.51m]內、Y檢定落在置信區間[-0.72m,-0.48m]內的概率為80%[8~10]。
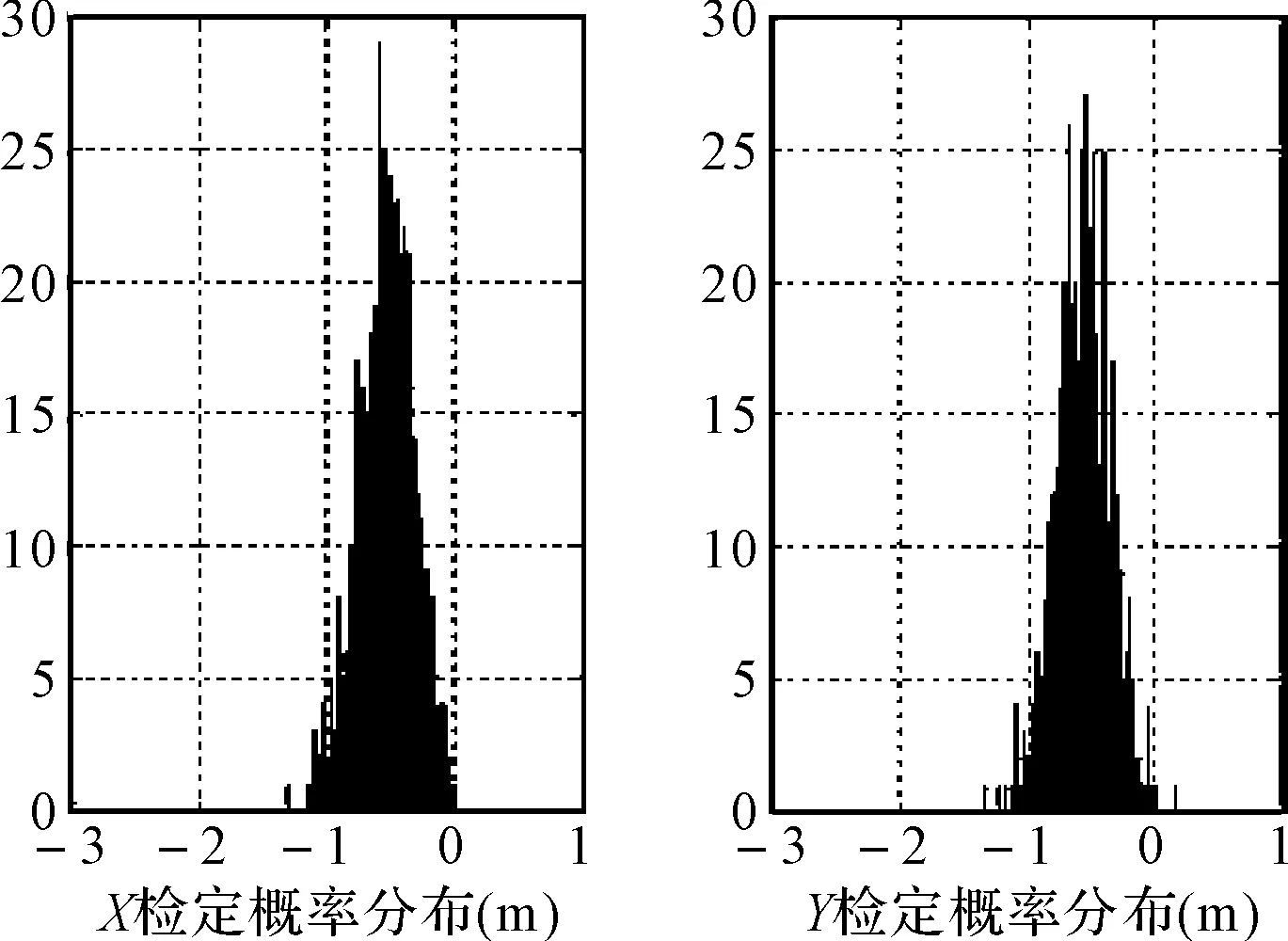
圖4 置信分析頻數直方圖
3結語
本文利用誤差分布檢驗、精度檢定、置信分析的方法對魚雷彈道的定位精度進行了仿真研究,對隨機誤差的量值給出測量精度的檢定結論,由于水下試驗的特殊性、水聲測量裝備的單一性和測量數據的不可重復性,在沒有真值作參考的情況下,本文給出了定量的分析。
參 考 文 獻
[1] 張儀,陳迎春,曹海軍.基于vega的魚雷彈道視景仿真軟件設計[J].艦船電子工程,2011(8):109-112.
[2] 周明,徐德民.火箭助飛魚雷彈道的仿真實現與應用研究[J].彈箭與制導學報,2007(2):235-238.
[3] 程宏.魚雷彈道跟蹤系統時延估計方法研究[D].西安:西北工業大學碩士論文,2002.
[4] 熊乾坤,唐世軒.一種魚雷主動聲自導目標檢測真實性判定方法[J].魚雷技術,2015,34(2):104-107.
[5] 孟慶玉,張靜遠,宋保維.魚雷作戰效能分析[M].北京:國防工業出版社,2003:131-154.
[6] 陳顏輝,朱偉良,杜毅.潛射魚雷彈道預測模型與仿真[J].海軍工程大學學報,2013(2):127-134.
[7] 彭海軍,王德石,陳覺之.魚雷彈道可視化仿真研究[J].武漢理工大學學報,2009(6):26-31.
[8] 董春鵬,石小龍.主動聲尾流自導魚雷導引彈道分析計算[J].魚雷技術,2007(2):13-16.
[9] 李曉寧,明星,朱若寒.反魚雷魚雷攔截彈道及攔截概率[J].魚雷技術,2008(3):34-36.
[10] 潘光,吳文輝,毛昭勇,等.高空遠程滑翔魚雷全彈道仿真關鍵技術[J].魚雷技術,2009(4):10-15.
中圖分類號TJ630.6
DOI:10.3969/j.issn.1672-9730.2016.03.020
作者簡介:陸揚,男,博士,高級工程師,研究方向:水聲測量。
收稿日期:2015年9月19日,修回日期:2015年10月7日