一種新型穩(wěn)定平臺伺服控制系統(tǒng)
2016-04-19 09:08:38王立玲李保宗劉秀玲肖金壯王光磊王洪瑞
中國慣性技術(shù)學(xué)報 2016年4期
王立玲,李保宗,劉秀玲,肖金壯,王光磊,王洪瑞
(河北大學(xué)電子信息工程學(xué)院 河北省數(shù)字醫(yī)療工程重點實驗室,河北 保定 071002)
一種新型穩(wěn)定平臺伺服控制系統(tǒng)
王立玲,李保宗,劉秀玲,肖金壯,王光磊,王洪瑞
(河北大學(xué)電子信息工程學(xué)院 河北省數(shù)字醫(yī)療工程重點實驗室,河北 保定 071002)
深入研究了三自由度并串聯(lián)混合機構(gòu)穩(wěn)定平臺,設(shè)計了一個非線性自適應(yīng)控制器。考慮到實際系統(tǒng)工作中存在摩擦、負載擾動和動力學(xué)參數(shù)誤差,分離出動力學(xué)模型中的未建模動力學(xué)參數(shù)、摩擦力參數(shù)和負載擾動,建立了關(guān)于待辨識參數(shù)的線性動力學(xué)模型。運用 Lyapunov方法設(shè)計了一個非線性自適應(yīng)控制器。構(gòu)建了并串聯(lián)光電穩(wěn)定平臺伺服系統(tǒng)實驗平臺。分別將所設(shè)計的控制器與計算力矩控制器分別在高速和低速擾動情況進行了實驗,實驗表明所提出非線性自適應(yīng)控制器在低速0.006 (°)/s時,跟蹤精度分別為滾轉(zhuǎn)軸0.071°、俯仰軸0.064°、偏轉(zhuǎn)軸0.038°,在20 (°)/s高速狀態(tài)下,跟蹤精度分別為滾轉(zhuǎn)軸0.045°、俯仰軸0.042°、偏轉(zhuǎn)軸0.029°,其控制效果明顯好于傳統(tǒng)控制。
并串聯(lián)機構(gòu);動力學(xué)分析;非線性自適應(yīng)控制;慣量矩陣
穩(wěn)定平臺的作用通過多種傳感器在線檢測,實時跟蹤控制系統(tǒng)來隔離外界載體的擾動,為載體上的設(shè)備或人員提供一個穩(wěn)定的工作平臺。其控制技術(shù)涉多學(xué)科的知識。目前在實際使用的主要是隔離載體的二、三軸搖擺的串聯(lián)旋轉(zhuǎn)臺,在小負載時能快速跟蹤目標(biāo)[1]。與目前存在的串聯(lián)式穩(wěn)定平臺機構(gòu)相比,并聯(lián)機構(gòu)的動力設(shè)備可以安裝機架的位置。工作的運動臺一般是幾個運動鏈與機架相聯(lián)接。因此其機構(gòu)占的空間小、剛度強、承載力高。并聯(lián)機構(gòu)本體尺寸變化很大時,仍保持非常穩(wěn)定的動力學(xué)特性。并聯(lián)機構(gòu)反解簡單,但正解比較復(fù)雜。并聯(lián)機構(gòu)各個連桿間耦合性強、工作空間窄小[2]。串并聯(lián)機構(gòu)綜合了串聯(lián)機構(gòu)和并聯(lián)機構(gòu)的共同優(yōu)點,不僅克服了原有并聯(lián)機構(gòu)工作空間小的缺點,獲得了較大的工作空間,而且克服了原有串聯(lián)機構(gòu)剛度小、承載能力不足等缺點。既具有并聯(lián)機構(gòu)剛度大、誤差小、自重負荷比小、運動慣性小、動力性能好、控制容易等特點,同時又具有較大的工作空間和靈活度,因此具有很好的應(yīng)用前景[3]。
本文研究一種新型三自由度并串聯(lián)光電穩(wěn)定平臺系統(tǒng),考慮實際系統(tǒng)工作中存在的摩擦、負載擾動和動力學(xué)參數(shù)誤差,采用非線性自適應(yīng)理論設(shè)計了控制系統(tǒng)。通過搭建實驗系統(tǒng),實驗研究非線性自適應(yīng)控制策略在實際并串聯(lián)光電穩(wěn)定平臺實驗裝置上的跟蹤效果和跟蹤性能。
1 基于動力學(xué)模型的非線性自適應(yīng)控制器設(shè)計
并串聯(lián)光電穩(wěn)定平臺如圖1所示,由正交球面并聯(lián)機構(gòu)和與之串聯(lián)的旋轉(zhuǎn)臺構(gòu)成,其中二自由度球面并聯(lián)機構(gòu)為空間5桿機構(gòu),所有運動副均為轉(zhuǎn)動副,所有軸線皆匯交于一點O,電機1和電機2軸互相垂直。二自由度球面并聯(lián)機構(gòu)運動平臺只做圍繞球心O的轉(zhuǎn)動。電機3與工作臺直接相連,電機3的軸線垂直于該工作平臺。
基坐標(biāo)系為ob-xbybzb,xb與電機1軸線一致,yb與電機 2軸線一致,zb由右手螺旋法則確定,動坐標(biāo)系為om-xmymzm,xm和ym軸與OA和OC同軸,zm由右手螺旋法則確定,S1為沿OmA的單位矢量,S2沿OE的單位矢量,S3沿OC的單位矢量。機構(gòu)輸入為電機轉(zhuǎn)角θ1、θ2,繞xb軸旋轉(zhuǎn)為滾轉(zhuǎn)角θr,繞yb軸旋轉(zhuǎn)為俯仰角θp,輸出上平臺姿態(tài)即為滾轉(zhuǎn)角θr、俯仰角θp。

圖1 并串聯(lián)光電穩(wěn)定平臺Fig.1 Parallel-serial photoelectric stabilized platform
考慮到摩擦力、負載擾動和動力學(xué)特性的非線性以及不確定性,本文選取相應(yīng)的動力學(xué)參數(shù)、摩擦力模型中的參數(shù)和負載擾動作為自適應(yīng)參數(shù),從穩(wěn)定平臺動力學(xué)模型中分離出這些自適應(yīng)參數(shù),把非線性強耦合的動力學(xué)模型寫為關(guān)于待辨識參數(shù)的線性表達式。
為了提高伺服系統(tǒng)的跟蹤性能,在系統(tǒng)運行過程中,實時估計系統(tǒng)模型參數(shù)以及非線性摩擦模型參數(shù),進行自適應(yīng)摩擦補償控制[4-6]。考慮到機構(gòu)在速度變化時,其摩擦力參數(shù)和特性將發(fā)生較大變化,選取自適應(yīng)參數(shù)中包括了連桿之間的庫侖摩擦力和粘滯摩擦力系數(shù),從而在自適應(yīng)控制的過程中實現(xiàn)摩擦力的自適應(yīng)補償。
摩擦力fm定義為

式中,fci表示庫侖摩擦力,fvi表示粘滯摩擦力系數(shù)。
考慮負載擾動和系統(tǒng)摩擦力的串并聯(lián)穩(wěn)定平臺的動力學(xué)模型如下:

式中,M(θ)為3×3慣量矩陣,B(θ)為3×3的哥氏力系數(shù)矩陣,C(θ)為3×3的離心力系數(shù)矩陣,。要實現(xiàn)有效的動力學(xué)控制,必須知道動力學(xué)模型(2)中相關(guān)參數(shù)的精確值。但是一方面,當(dāng)機構(gòu)裝配好后,其動力學(xué)參數(shù)難以精確測量,并且會受負載的影響;另一方面,機構(gòu)在運動過程中所受的摩擦力存在復(fù)雜的非線性,且摩擦力特性受速度的影響很大。所定義的庫侖+粘滯摩擦力模型式(1),其模型參數(shù)的值在不同運動速度下也會發(fā)生波動。所以,需要通過在線辨識動力學(xué)參數(shù)和摩擦力模型中的參數(shù)來實時計算動力學(xué)補償項和摩擦力補償項,從而實現(xiàn)穩(wěn)定平臺的自適應(yīng)控制。
1.1 穩(wěn)定平臺動力學(xué)模型
要實現(xiàn)并聯(lián)機構(gòu)的自適應(yīng)控制,首先必須在線辨識出自適應(yīng)參數(shù),即未建模部分,根據(jù)動力學(xué)模型中各個項所占比重,在考慮未建模和測量精度和裝配誤差等原因,慣量矩陣修正為

把待辨識的參數(shù)從動力學(xué)模型(2)中分離出來,從而把動力學(xué)模型寫成關(guān)于待辨識參數(shù)的線性表達式:

式中,待辨識參數(shù)a是一個12×1的向量,它包含了3個動力學(xué)參數(shù)ΔM11、ΔM12、ΔM22以及3個擾動f1、f2、f3和摩擦力模型中的6個參數(shù)fci、fvi(i=1,2,3)。在式(3)中,是3×12的回歸矩陣。
1.2 非線性自適應(yīng)控制器設(shè)計
1.2.1 控制律設(shè)計
設(shè)θd為末端執(zhí)行器在工作空間的期望軌跡,實際位置跟蹤誤差e定義為

定義廣義誤差向量s為

式中,Λ為對稱正定矩陣。事實上,s≡0代表了一個線性微分方程組,假定θd(0)=θ(0),則其唯一解是e≡0。因此e和同時收斂的問題可以簡化為使s趨近于0的問題。在式(5)的基礎(chǔ)上定義為


基于動力學(xué)模型,設(shè)計如下的控制律:

式中,Me是由動力學(xué)修正參數(shù)計算得到慣性矩陣,為由摩擦力自適應(yīng)辨識參數(shù)計算得到的摩擦力,Kd為對稱正定矩陣。

在控制律(9)中,F(xiàn)代表操作空間的控制力矩,而實際控制需要的是三個主動關(guān)節(jié)的驅(qū)動力矩:

控制律(9) 實際上是由系統(tǒng)估計矩陣Me摩擦力估計值以及常量矩陣Kd和Λ共同決定的,Me由辨識得到的動力學(xué)參數(shù)計算得到,由辨識得到的摩擦力參數(shù)計算得到,因此下面將討論如何獲得這些待辨識參數(shù)。
1.2.2 參數(shù)自適應(yīng)律設(shè)計
控制律(8)中的動力學(xué)補償項、摩擦力補償項和負載擾動可寫為

1.2.3 系統(tǒng)穩(wěn)定性分析
定理1:設(shè)計的控制律(8)和參數(shù)自適應(yīng)律可以使得并串聯(lián)光電穩(wěn)定平臺伺服系統(tǒng)(2)的穩(wěn)定性,t→∞時,e→0和→0。



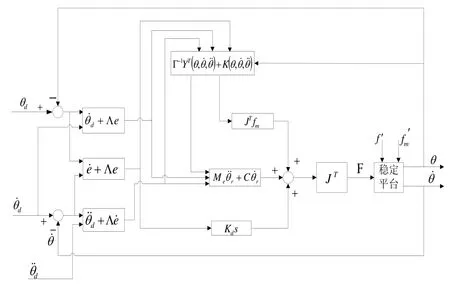
圖2 非線性自適應(yīng)控制方框圖Fig.2 Configuration of nonlinear adaptive control system
2 伺服系統(tǒng)電氣設(shè)計
并串聯(lián)光電穩(wěn)定平臺實驗系統(tǒng)的電氣控制系統(tǒng),由電氣控制柜、伺服控制系統(tǒng)和電源部分等組成。伺服控制系統(tǒng)主要對來自上位計算機、陀螺儀的指令、狀態(tài)和誤差信號進行綜合、校正等處理形成驅(qū)動伺服平臺。電機轉(zhuǎn)動的控制電壓來完成對臺體的操作和控制,實現(xiàn)并串聯(lián)光電穩(wěn)定平臺上成像傳感器視軸的穩(wěn)定和對目標(biāo)的跟蹤。穩(wěn)定平臺的伺服系統(tǒng)總框圖如圖3所示。

圖3 穩(wěn)定平臺的伺服系統(tǒng)框圖Fig.3 Block chart of a stable platform’s servo system
3 實驗及結(jié)果
3.1 實驗設(shè)計
實驗硬件平臺如圖 4所示,位于下面的是正交3-2-1結(jié)構(gòu)六自由度并聯(lián)運動平臺,模擬載體運動用于提供擾動。位于上面的并串聯(lián)光電穩(wěn)定平臺。六自由度運動平臺和穩(wěn)定平臺分別由各自的電機驅(qū)動。
根據(jù)實際檢測條件,本系統(tǒng)穩(wěn)定精度的實驗及測試方法是并串聯(lián)光電穩(wěn)定平臺上安裝慣性速率陀螺和傾角傳感器以提供空間角速度和角度反饋。伺服控制系統(tǒng)通過對載體角運動的隔離以獲得工作臺保持慣性基準(zhǔn)面。
計算機中安裝Quarc軟件后,采用QuaRC Targets中的各模塊在Simulink中搭建控制器,通過NI6230板卡實現(xiàn)伺服控制算法和并串聯(lián)光電穩(wěn)定平臺通信。并串聯(lián)光電穩(wěn)定平臺的傾角傳感器、光纖陀螺儀和編碼器的電信號通過讀模擬量(HIL Read Analog)模塊讀入到伺服控制器,控制信號通過寫模擬量(HIL Write Analog)模塊輸出。

圖4 并串聯(lián)穩(wěn)定平臺實驗系統(tǒng)Fig.4 Testing system of parallel-serial platform
3.2 實驗結(jié)果
本節(jié)將所設(shè)計非線性自適應(yīng)控制和傳統(tǒng)計算力矩控制策略應(yīng)用到并串聯(lián)穩(wěn)定平臺上,進行對比實驗。實驗時給定輸入為零,分別給六自由度運動平臺電機施加12sin(2πt)(°)/s和20sin(2πt)(°)/s信號,模擬環(huán)境擾動。并串聯(lián)穩(wěn)定平臺系統(tǒng)各轉(zhuǎn)動軸運動實時位置實驗數(shù)據(jù)曲線如圖5至圖7所示。圖5至圖7中,(a)圖為12sin(2πt) (°)/s擾動時誤差,(b)圖為20sin(2πt) (°)/s擾動時誤差。

圖5 滾轉(zhuǎn)軸穩(wěn)定誤差Fig.5 Stabilized error of roll axis

圖6 俯仰軸穩(wěn)定誤差Fig.6 Stabilized error of pitch axis
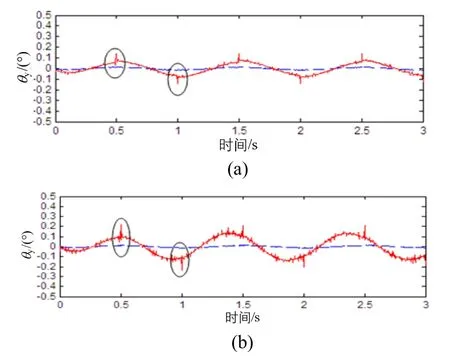
圖7 偏轉(zhuǎn)軸穩(wěn)定誤差Fig.7 Stabilized error of yaw axis
3.3 實驗結(jié)果分析
由圖5至圖7可以看出,計算力矩控制時,滾轉(zhuǎn)軸誤差最大,橫滾最小。非線性自適應(yīng)控制時沒有明顯變化,滾轉(zhuǎn)軸受俯仰軸耦合影響,在并串聯(lián)光電穩(wěn)定機構(gòu)實際設(shè)計中,只要轉(zhuǎn)動慣量變化范圍不超過一定范圍,就可以把轉(zhuǎn)動慣量的變化當(dāng)作一種擾動,通過控制系統(tǒng)的適當(dāng)設(shè)計可以克服這種擾動對滾轉(zhuǎn)軸的耦合影響。非線性自適應(yīng)控制器能夠通過在線辨識出俯仰對滾轉(zhuǎn)的耦合未建模部分,并進行補償。非線性自適應(yīng)控制由于能夠在反饋抑制干擾的基礎(chǔ)上,在線辨識摩擦力、負載擾動和模型誤差,并通過補償進一步抑制,因此對摩擦的抑制能力明顯優(yōu)于計算力矩控制,基本上不存在尖峰誤差。
從實驗結(jié)果可以看出,并串聯(lián)穩(wěn)定平臺采用計算力矩控制時,在低速的情況下,系統(tǒng)的跟蹤誤差相對較低,而在速度相對較大的情況下,系統(tǒng)的跟蹤誤差相對較大。總體而言,采用非線性自適應(yīng)控制系統(tǒng):1)在0.06 (°)/s時,滾轉(zhuǎn)軸的跟蹤精度為0.071°,俯仰軸跟蹤精度為0.064°,偏轉(zhuǎn)軸跟蹤精度為0.038°;2)在20 (°)/s時,滾轉(zhuǎn)軸的跟蹤精度為0.045°,俯仰軸跟蹤精度為0.042°,偏轉(zhuǎn)軸跟蹤精度為0.029°。這些結(jié)果顯示了非線性自適應(yīng)控制器的優(yōu)良性能。
4 小 結(jié)
本文根據(jù)并串聯(lián)穩(wěn)定平臺伺服控制系統(tǒng)要求,將所設(shè)計的非線性自適應(yīng)控制應(yīng)用于并串聯(lián)光電穩(wěn)定平臺系統(tǒng)實驗裝置中。通過并聯(lián)六自由度運動平臺模擬實際載體擾動,與計算力矩控制實驗結(jié)果對比研究,非線性自適應(yīng)控制器能夠在線辨識動力學(xué)未建模參數(shù)、摩擦力、各軸之間耦合,并實施補償。無論低速還是高速,與計算力矩相比,在所有干擾補償之后,系統(tǒng)穩(wěn)定誤差減小,證明了補償?shù)挠行裕瑫r為工程應(yīng)用提供了理論依據(jù)。
基于開放式結(jié)構(gòu)、標(biāo)準(zhǔn)模塊化的多功能運動平臺伺服系統(tǒng)的建立,為光電穩(wěn)定跟蹤系統(tǒng)相關(guān)技術(shù)的研究和驗證提供了一個有效的、與實際系統(tǒng)比較相似的模擬環(huán)境,所設(shè)計的實驗平臺能夠在實驗室條件下模擬船載、機載光電成像跟蹤系統(tǒng)等動力學(xué)特性和空間運行姿態(tài),為進一步研究寬頻帶、高性能的此類伺服系統(tǒng)的精度提供了良好的平臺,可為實際系統(tǒng)的研制和改進提供參考依據(jù)和實驗數(shù)據(jù)。
(References):
[1] Tanev T K. Kinematics of a hybrid (parallel-serial) robot manipulator[J]. Mechanism and Machine Theory, 2000, 35(9): 1183-1196.
[2] Chen C T. Reconfiguration of a parallel kinematic manipulator for the maximum dynamic load-carrying capacity [J]. Mechanism and Machine Theory, 2012, 54: 62-75.
[3] Patel Y D, George P M. Parallel manipulators applica-tions - a survey[J]. Modern Mechanical Engineering, 2012, 2(3): 57-64.
[4] Niu X M, Gao G Q, Liu X J, et al. Dynamics and Control of a Novel 3-DOF Parallel[J]. International Journal of Automation and Computing, 2013, 10(6): 552-562.
[5] Kokotovi P, Arcak M. Nonlinear and adaptive control: an abbreviated status report[R]//The 9th Mediterranean Conference on Control and Automation. Dubrovnik Croatia, 2001: 1-15.
[6] Niu X M, Gao G Q, Liu X J, et al. Dynamics and Control of a Novel 3-DOF Parallel[J]. International Journal of Automation and Computing, 2013, 10(6): 552-562.
[7] 任彥, 劉正華. 滑模自適應(yīng)控制在光電穩(wěn)定平臺中的應(yīng)用[J]. 控制工程, 2014, 21(1): 32-40. Ren Yan, Liu zheng-hua. Sliding mode adaptive control in the application of the photoelectric stabilized platform [J]. Journal of Control Engineering, 2014, 21(1): 32-40.
[8] 楊蒲, 李奇. 三軸陀螺穩(wěn)定平臺控制系統(tǒng)設(shè)計與實現(xiàn)[J].中國慣性技術(shù)學(xué)報, 2007, 15(2): 171-176. Yang Pu, Li Qi. Design and realization of control system for three-axis gyro stabilized platform[J]. Journal of Chinese Inertial Technology, 2007, 15(2): 172-176.
[9] Ansarifar G R, Talebi H A, Davilu H. An adaptivedynamic sliding mode controller for non-minimum phase systems[J]. Commun Nonlinear Sci Numer Simulut, 2012, 17(1): 414-425.
[10] Zheng Yun-feng, Wen Chang-yun, Li Zheng-guo. Robust adaptive asymptotic tracking control of uncertain nonlinear systems subject to nonsmooth actuator nonlinearities[J]. International Journal of Adaptive Control and Signal Processing, 2013: 108-121.
[11] Zhu Y, Wen C, Su H, et al. Adaptive modular control for a class of nonlinear systems with unknown time-varying parameters[C]//Proceedings of American Control Conference, Washington, USA, 2013: 17-19.
Servo control system for a new stabilized platform
WANG Li-ling, LI Bao-zong, LIU Xiu-ling, XIAO Jin-zhuang, WANG Guang-lei, WANG Hong-rui
(Key Laboratory of Digital Medical Engineering of Hebei Province, College of Electronic and Information Engineering, Hebei University, Baoding 071002, China)
A parallel-serial opto-electronic stable platform was developed, and a nonlinear adaptive controller was designed. Considering that there were friction, load disturbance and kinetic parameters error in the real controller system, the unmodeled dynamics parameters, friction parameters and effects of load disturbance were separated from the dynamics model. Then the dynamic model with linear expressions was established. A Lyapunov method was applied for the design of nonlinear adaptive controller. The new proposed nonlinear adaptive controller was applied into the parallel-serial opto-electronic stable platform under the disturbances of high speed and low speed, respectively. The analysis and experiment results show that, by using the proposed nonlinear adaptive controller, the tracking precisions of rolling axis, pitching axis and yaw axis are 0.071°, 0.064° and 0.038° respectively in low-speed condition of 0.006 (°)/s, and they are 0.045°, 0.042° and yaw axis 0.029° respectively in high-speed condition of 20 (°)/s. The control effects of the nonlinear adaptive controller are significantly better than those of traditional computed torque controller.
parallel-serial mechanism; dynamics analysis; nonlinear adaptive control; inertia matrix
U666.1
:A
2016-03-25;
:2016-05-30
國家自然科學(xué)基金資助項目(61473112 );河北省教育廳青年基金資助項目(QN2014101);河北省自然科學(xué)基金項目(F2015201112)
王立玲(1979—),女,博士,從事并聯(lián)機構(gòu)的動力學(xué)建模與控制研究。E-mail: wll_betty@126.com
1005-6734(2016)04-0431-06
10.13695/j.cnki.12-1222/o3.2016.04.003
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
