多源異構超緊組合非線性信息互耦合方法及特征分析
2016-04-19 09:09:00錢偉行康國華
中國慣性技術學報 2016年4期
關鍵詞:信號
謝 非,趙 靜,錢偉行,康國華
(1. 南京師范大學 電氣工程與自動化學院,南京 210042;2. 南京郵電大學 自動化學院,南京 210023;3. 江蘇省三維打印裝備與制造重點實驗室,南京210042;4. 南京航空航天大學 微小衛星研究中心,南京 210016)
多源異構超緊組合非線性信息互耦合方法及特征分析
謝 非1,3,趙 靜2,3,錢偉行1,康國華4
(1. 南京師范大學 電氣工程與自動化學院,南京 210042;2. 南京郵電大學 自動化學院,南京 210023;3. 江蘇省三維打印裝備與制造重點實驗室,南京210042;4. 南京航空航天大學 微小衛星研究中心,南京 210016)
慣性/衛星超緊組合技術核心將衛星導航接收機基帶信號處理過程中的環路非線性信息與慣性導航信息進行深層次互耦合。在研究超緊組合多信息源異型耦合架構特征及互耦合機理的基礎上,對比分析了超緊組合非相干及相干互耦合方法,總結了不同超緊組合觀測矢量提取方法及環路模型,然后設計了超緊組合互耦合信息處理流程及信號NCO(數控振蕩器)控制方法。最后,利用仿真平臺對非相干及相干方式進行了衛星信號受干擾及載體動態變化環境下的試驗對比分析,結果表明超緊組合相干方法相較于非相干方式具有更優的觀測矢量提取性能及抗干擾性能。
超緊組合;組合導航;衛星接收機;抗干擾
近年來,在衛星導航抗干擾及高動態適應性能需求牽引下,慣性/衛星超緊組合(Ultra-tightly INS/GNSS coupled)技術逐漸被提出并引起關注[1],為改善衛星導航脆弱性提供了新的技術途徑。我國北斗衛星導航系統的自主建設也為超緊組合技術發展提出迫切需求。
慣性/衛星超緊組合技術核心將衛星導航接收機基帶信號處理過程中的環路非線性信息與慣性導航信息進行深層次互耦合,并最終實現慣性系統和衛星接收機性能的相互輔助與提高。美國Draper實驗室通過研究非線性超緊組合算法,從而將GPS接收機環路相關器的非線性信息與微慣性系統解算的位置、速度、姿態及傳感器誤差等狀態進行耦合[2];加拿大Calgary大學的Lachapelle教授團隊針對超緊組合架構模型、觀測量提取方式、耦合濾波器設計及樣機開發等方面開展了深入研究[3-5]。此外,美國的IGS LLC(Honeywell與Rockwell Collins合資)公司、CRS公司、Auburn大學及澳大利亞的UNSW大學[6-10]等均針對超緊組合環路非線性信息處理與融合等方面開展了相關研究。
本文針對慣性/衛星超緊組合的架構特征及非線性信息互耦合機理進行分析,在此基礎上討論了超緊組合非相干及相干互耦合方法特點及觀測矢量提取模型,最后對信號干擾及動態變化環境下的不同超緊組合耦合方法進行了實驗對比與分析。
1 慣性/衛星超緊組合架構及互耦合機理分析
1.1 慣性/衛星超緊組合多源異型耦合架構分析
傳統的慣性/衛星組合導航系統以松、緊組合兩種模式為主[11-12],此時,衛星接收機采用傳統標量跟蹤結構進行信號的鎖定與解調,并且多個跟蹤通道之間無任何信息交互,也無法借助其他外部信息(如慣性信息)對環路信號跟蹤進行控制。因此,一旦接收機受到信號干擾或載體較高動態影響,容易出現環路信號失鎖乃至導航定位失效問題[13]。
針對這一問題,從慣性導航系統與衛星導航內部的信號處理架構層面考慮改變組合體制與耦合方式,通過將慣性信息與衛星接收機基帶信號跟蹤處理進行深層次融合,形成了慣性/衛星超緊組合導航架構[14]。與松、緊、慣性輔助三種組合模式相比,超緊組合架構的最大特點在于其信息耦合的來源更為豐富且組合的層次也更為深入,同時,慣性導航系統和衛星接收機均不再保持各自獨立的工作狀態,而是采用接收機環路內部非線性相關結果中隱含的相位、頻率參量作為觀測量,通過建立組合濾波器耦合模型進行慣性與接收機矢量環路信號的信息融合,同時利用慣性導航結果直接控制環路架構中本地偽碼及載波信號生成,以完全斷開接收機中傳統標量環路的反饋控制,實現慣性和接收機的深度互耦合。
1.2 慣性/衛星超緊組合信息互耦合機理及模型分析
由于載體與衛星間相對運動因素的影響,使得衛星導航接收機接收到的衛星信號偽碼相位及載波頻率處于不斷的變化之中,而超緊組合導航技術則是利用了信號參量變化與載體及衛星相對運動之間內在關系,實現了矢量環路信號及慣性導航信息間的深度耦合作用,這也正是慣性/衛星超緊組合中信息融合的內在機理。
本文通過衛星接收機矢量環路信號模型的建立及相關結果與載體運動狀態關聯進行超緊組合信息融合機理分析。為了說明衛星接收機環路內部相關積分結果及碼相位偏差及載波頻率偏差間的內在關聯,環路即時相關積分值可由以下數學模型表示:
式中:iP、qP為I、Q兩個支路的即時相關結果;Tc為相關積分時間長度;A為相關積分幅值;D(·)為導航電文數據比特電平值;R(·)代表偽碼自相關函數;δτ為本地復制碼與接收碼的相位差異;ωe、fe、θe、φe分別代表復制載波與接收載波之間的角頻率差、頻率差、初相差及相位差。
衛星導航接收機在載波解調及偽碼解擴過程中一方面根據自相關主峰位置獲得偽碼信號的相位并將其轉化為偽距測量值,用于位置解算,另一方面獲得多普勒頻移并將其轉化為偽距率測量值,用于速度解算。因此,相位及頻率的變化分別映射了偽距及偽距率的變化,而偽距及偽距率的變化則同接收機與衛星運動視線方向上的幾何關系密切關聯,偽碼相位偏差與位置誤差關聯示意圖如圖1所示。
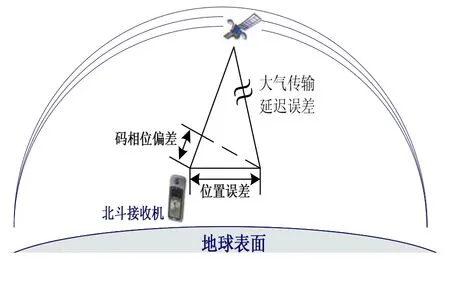
圖1 相位誤差與接收機位置誤差關聯示意圖Fig.1 Schematic of correlation between phase bias and receiver position bias
如果利用慣性系統提供的實時載體狀態對本地復制偽碼相位及載波頻率進行估計,則可進一步獲得超緊組合環路中偽碼相位偏差(已轉換為距離值,單位m)及載波頻率偏差(單位Hz)與慣性導航狀態誤差之間的關聯模型如下:
1)偽碼相位偏差關聯模型:
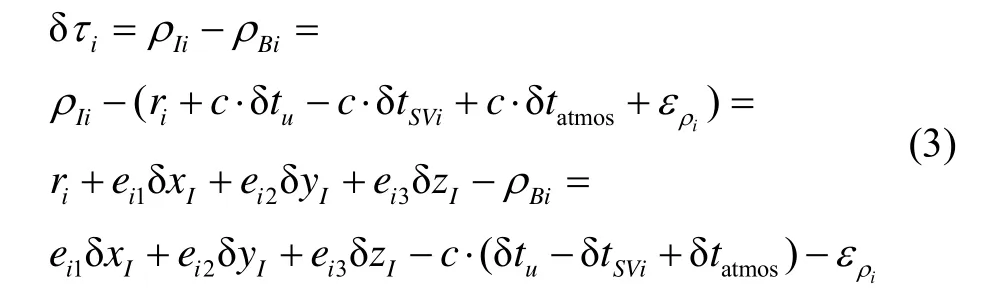
2)載波頻率偏差關聯模型:
因此,從式(1)~(4)的模型中可以看出,超緊組合利用接收機環路內部非線性相關信息中所蘊含的碼相位偏差及載波頻率偏差作為觀測量,以對慣性導航狀態(位置、速度)誤差進行估計,從而完成慣性與接收機環路信息的深度融合。因此,選擇合適的非線性信息估計方法,對超緊組合系統中觀測信息的提取質量有著重要作用。
2 慣性/衛星超緊組合非線性互耦合方法分析
2.1 慣性/衛星超緊組合互耦合方法分析
超緊組合的典型特點在于其采用了環路非線性相關積分結果(I、Q)中隱含的相位及頻率信息與慣性導航信息進行耦合,為了獲得較為精確的相位及頻率參量,需從相關積分結果中提取有效的觀測矢量信息。
目前,針對超緊組合的觀測信息提取主要包括了兩種方式:一種是以環路鑒相器輸出作為導航濾波器觀測量的非相干方式(Non-Coherent);另一種為利用環路子濾波器提取導航濾波器觀測量,并將相關積分結果作為子濾波器觀測量的相干方式(Conherent)[15]。1)超緊組合非相干互耦合方式
非相干方式利用通道跟蹤衛星到接收機位置視線方向上的狀態(位置、速度)誤差與碼相位及載波頻率之間的內在關系,將相關積分結果I、Q通過鑒相/鑒頻器輸出得到的接收信號和本地信號的相位和頻率偏差轉換為偽距偏差和偽距率偏差,然后作為組合濾波器的觀測量,實現對慣性導航系統狀態分量的估計及校正。對于現實中的衛星接收機來講,由于接收信號的相位及頻率時常包含著短暫的、小幅度的隨時間變化的高階激勵成分,因此,在非相干方式的應用過程中,經常采用觀測預處理濾波器的設計來進一步消減低階濾波器產生恒定相位及頻率跟蹤誤差。超緊組合非相干耦合方法結構框圖如圖2所示。
圖2 超緊組合非相干耦合方法結構框圖Fig.2 Block diagram of non-coherent ultra-tight integration
對于衛星載波跟蹤環路,最終目的是產生本地信號,令本地信號和輸入信號的相位差為 0。通過環路狀態估計可以得到當前時刻(k時刻)的碼相位差δkτ、載波相位差Δkθ、信號載波頻率差Δkω以及信號載波頻率差的變化率之間的相互關系。按此狀態外推k+1時刻的碼相位差及載波相位差分別為:
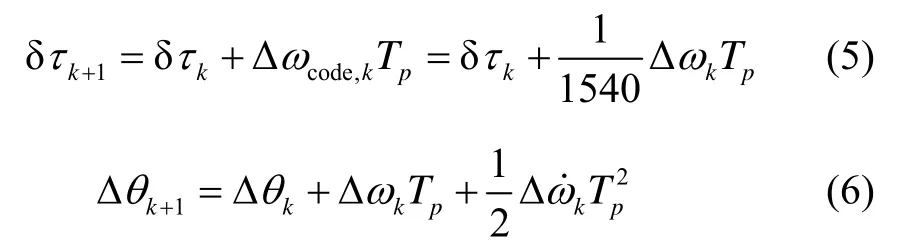
碼環和載波環中的鑒相器分別估計了本地信號和輸入信號的碼相位差以及載波相位差。由于鑒相器的輸出一般是線性的(或者近似線性),為了更好地利用鑒相器特性及進一步降低預處理濾波器設計復雜性,在非相干超緊組合觀測預處理濾波器中采用碼及載波鑒相器輸出結果作為觀測量,而狀態方程為:

此外,接收機環路相關器輸出頻率可通過相干積分時間或非相干積分時間進行調整,而觀測預處理濾波器的引入也可將組合導航濾波器的更新率減小到10~100 Hz,從而降低了高階組合濾波器的運算負擔。2)超緊組合相干互耦合方式
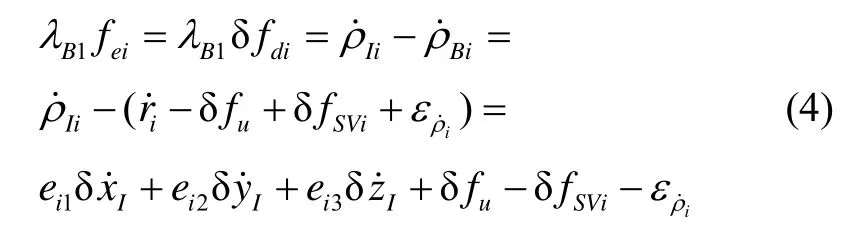
而在相干方式中,衛星接收機直接將跟蹤環路各通道相關積分輸出值I和Q送至子濾波器或組合導航濾波器作為觀測量,對本地偽碼及載波信號的相位、頻率參量及慣性系統輸出狀態分量進行估計。其優點是不采用環路鑒相/鑒頻器,避免了鑒相/鑒頻器引入的無法建模的高階非線性因素,降低觀測矢量中的跟蹤誤差及噪聲分量。但是,由于衛星接收機基帶信號處理通道相關輸出中均含有同相與正交的6路相關積分結果,因此,對N通道的接收機系統來說,即有N×6組觀測矢量送入組合導航濾波器中,會引起系統觀測階數較高以致組合導航濾波器的計算負荷較大問題。在實際處理過程中,相干耦合方式通常利用環路子濾波器構建來減小環路高階相關觀測信息處理運算量。超緊組合相干耦合方法結構框圖如圖3所示。
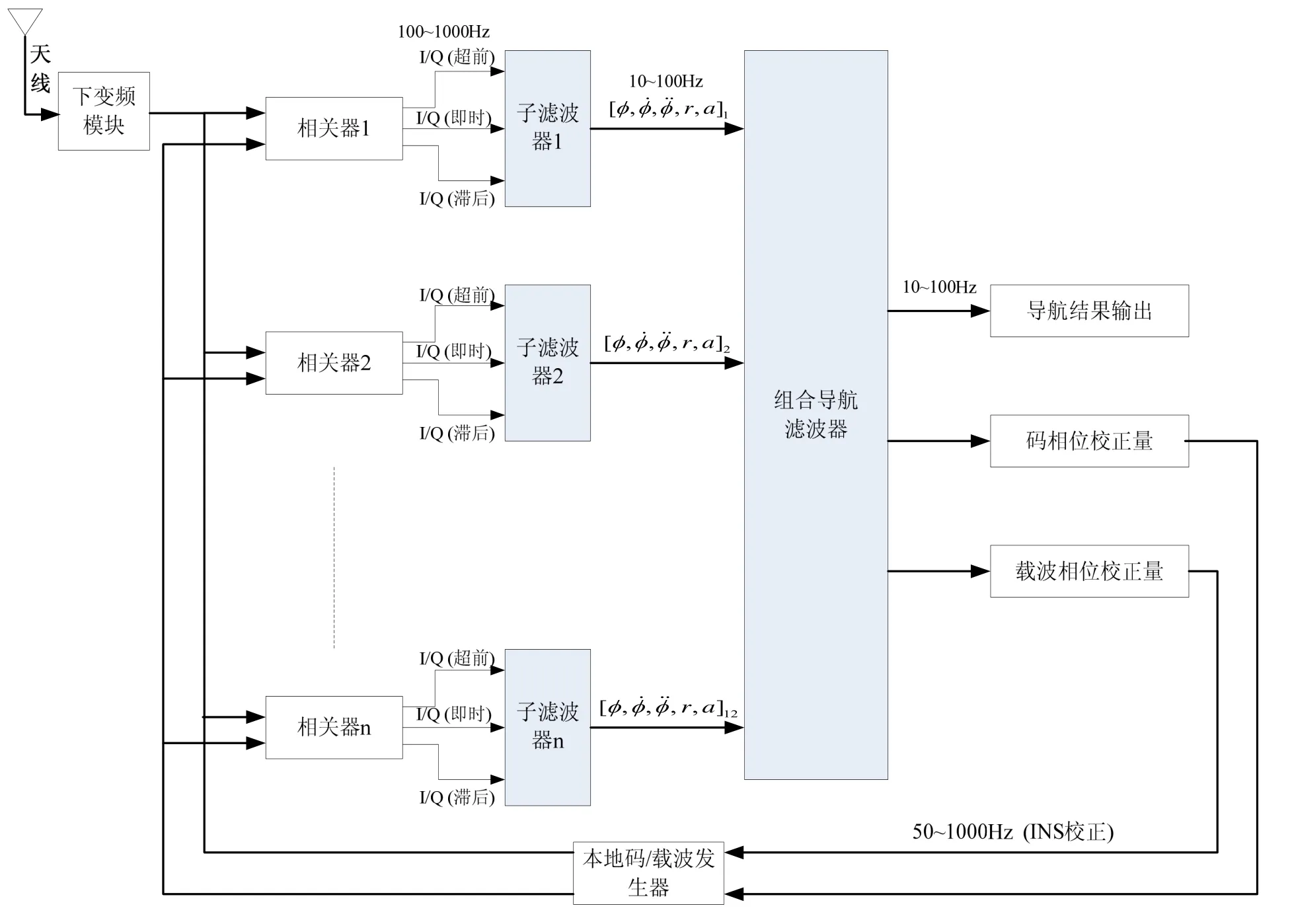
圖3 超緊組合相干耦合方法結構框圖Fig.3 Block diagram of coherent ultra-tight integration
相干耦合架構中,由于子濾波器的目標同為提取接收信號與本地信號之間的相位偏差δτk及頻率偏差Δωk,因此其狀態矢量選擇及狀態方程設計同非相干方式。而觀測方程模型如下:
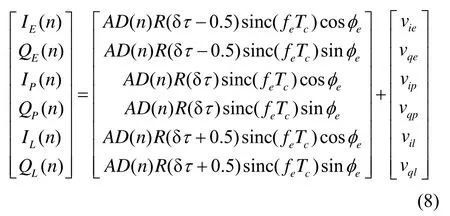
此外,由式(8)可以看出,環路相關積分結果與狀態分量相位偏差δτk及頻率偏差Δωk=2πfe之間存在著較強的非線性耦合關系,因此,相干耦合超緊組合的子濾波器一般選取適用于I/Q參量非線性特征的狀態估計器(Unscented Kalman Filter,UKF或Extended Kalman Filter,EKF等)[16]來提高系統的觀測范圍及觀測矢量的狀態估計精度。其中,UKF方法是在卡爾曼濾波框架基礎上,通過UT(Unscented Transform)變換方式,用一定數量采樣點對非線性密度函數進行逼近。同EKF方法相比,UKF方法計算量與EKF同階次,但卻避免了實際應用中較難獲得非線性函數雅克比矩陣的問題。事實上,相干耦合方式中的子濾波器往往也是對環路信號參量進行估計,因而與非相干耦合方式本質上是相同的。
2.2 慣性/衛星超緊組合信息互耦合流程分析
超緊組合系統核心是將衛星導航接收機中基帶信號解調處理和慣性導航信息進行深層次互耦合,除了建立導航濾波器互耦合模型及采用相關器輸出參量作為其觀測量之外,還需斷開衛星接收機傳統標量跟蹤環路中本地信號的反饋控制通道,利用修正后的慣性導航結果直接控制矢量環路中本地偽碼及載波信號生成,如圖3所示,完成對慣性導航狀態和接收機環路信號參量的估計,實現慣性和衛星接收機環路信息的深度耦合及雙向輔助。慣性/衛星超緊組合互耦合方法信息處理流程為:
1)對慣性傳感器組件測量信息進行采集處理,并基于慣性導航解算原理完成本周期慣性導航位置、速度、姿態等狀態的解算;
2)衛星接收機對下變頻后的中頻信號進行基帶多通道信號相關及解調處理,環路信號經偽碼解擴及載波解調后輸出六路相關積分結果;
3)判斷環路信號周期,提取預處理濾波器或子濾波器的觀測量,并按設定周期將觀測量送入導航濾波器中進行信息耦合;
4)利用導航濾波器輸出結果校正慣性導航狀態并輸出,同時利用校正狀態實現對環路偽碼及載波NCO控制和本地信號相位及頻率的調整,進行下一周期環路信號的相關處理及導航信息的耦合解算。
最后,為了實現接收機跟蹤環路本地信號的矢量控制,需利用外部慣性信息估計碼環NCO及載波環NCO控制量。本地碼NCO控制調整量的計算方法如下:
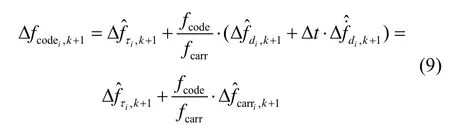
式(9)中包括了兩種控制分量計算:第一為接收機和第i個通道跟蹤衛星之間相對位移變化產生的偽碼相位變化(即為碼頻率偏移量),其計算方法如式(10)所示;第二部分為接收機和衛星間的相對運動產生的多普勒頻移變化導致的碼頻率偏移,見式(11)。


在對衛星接收機跟蹤環路本地信號進行控制的過程中,式(9)及(11)計算的頻率調整量為下一周期相對上一周期的NCO控制頻率變化量,該控制量的輸入對原有跟蹤環路的沖擊非常微弱,因此對保持環路的跟蹤穩定性具有良好的支撐作用。
3 實驗與分析
為了對比分析不同耦合架構超緊組合觀測性能,利用搭建的慣性/衛星超緊組合仿真實驗平臺分別對非相干及相干互耦合方式進行測試,實驗模擬了信號受噪聲干擾環境下能量衰減及載體動態變化兩種場景,其中動態變化過程包括滑跑、爬升、平飛、持續10 s的50 g高過載及持續20 s的恒定加加速度0.5 g/s,整個過程的三維動態軌跡如圖4所示:初始階段信號載噪比為45 dB-Hz,在平飛階段引入噪聲干擾,信號載噪比衰減至20 dB-Hz,然后再撤消干擾逐漸恢復。
圖4 實驗測試所用載體三維動態軌跡圖Fig.4 Mimic three-dimensional dynamic trajectory designed for simulation experiments
由于非相干及相干互耦合架構的顯著區別在于其對環路信號觀測量的提取方式不同,因此,針對同一場景下兩種架構的觀測量提取結果如圖5所示。超緊組合的主要目標在于利用慣性信息的耦合降低接收機環路的等效帶寬及消除動態應力,并維持環路信號的跟蹤狀態,而環路信號的測量誤差則由多源噪聲引起的相位抖動噪聲及動態應力抖動噪聲兩部分決定。此實驗中多源噪聲引入的總相位抖動均方差為

式中:σt,PLL為寬帶熱噪聲引起的相位抖動,σv為用戶運動及接收機裝置的機械顫動引起的基準振蕩頻率抖動對應的相位抖動,σA為接收機晶體振蕩器的艾蘭型相位抖動,后兩者一般相對較小,此處的環路帶寬設置為BL=25 Hz,環路相關積分時間設為Tc=0.001 s。此外,接收機二階環路在加速度為50 g動態應力作用下產生的相位跟蹤誤差約為

對于非相干耦合方式而言,該誤差已遠超過鑒相器的工作容限,雖然超緊組合系統可通過慣性導航結果抵消大部分的動態應力影響,但鑒相器輸出經觀測預處理濾波后仍會出現一定波動。相比較而言,相干互耦合架構由于直接將跟蹤環路中各通道相關積分輸出值I和Q送至子濾波器,避免了受鑒相器工作范圍限制而無法鑒別相位誤差的問題,因此,其觀測結果受高動態應力的影響較小一些。實驗場景后期在勻速運動狀態下引入了恒定0.5 g/s加加速度,由于動態應力大小由衛星與接收機之間的徑向運動大小決定,因此,恒定0.5 g/s加加速度對觀測結果的影響相對較小。
圖5 非相干及相干互耦合方法提取觀測量結果對比Fig.5 Performance comparison on measurements between non-coherent and coherent mutual coupling methods
綜上所述,超緊組合相干方法與非相干方法相比,雖然模型設計及算法實現上較為復雜,但避免了由于鑒相器工作范圍受限及鑒相器非線性特性引入的測量噪聲無法建模的問題,可以更為精確地提取超緊組合環路非線性信息中的有效觀測矢量,從而間接提高了超緊組合導航濾波器的估計精度及系統的導航性能。
4 總結與展望
針對慣性/衛星超緊組合架構特征及互耦合機理分析基礎上,總結了超緊組合非相干及相干互耦合方法特點及觀測矢量提取模型。通過接收信號受干擾及載體動態變化環境下的環路觀測性能實驗進一步說明了超緊組合相干耦合方法的性能優勢及特點。后續關于不同耦合方法性能分析及系統設計還需持續研究。
(References):
[1] Li K, Zhao J X, Wang X Y, et al. Federated ultra-tightly coupled GPS/INS integrated navigation system based on vector tracking for severe jamming environment[J]. IET Radar, Sonar and Navigation, 2016, 10(6): 1030-1037.
[2] Landis D, Thorvaldsen T, Fink B, et al. A deep integration estimator for urban ground navigation[C]// IEEE/ION Position, Location, and Navigation Symposium. 2006: 927-932.
[3] Sun D, Petovello M G, Cannon M E. Ultra-tight GPS/ reduced-IMU integration for land vehicle navigation[J]. IEEE Trans. Aerospace and Electronic Systems, 2013, 49(3): 1781-1791.
[4] Bhaskar S, Curran J, Lachapelle G. Effect of oscillator quality on ultra-tight GPS/INS aided carrier phase tracking[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS). 2012: 56-66.
[5] Krasovski S, Petovello M G, Lachapelle G. Ultra-tight GPS/INS receiver performance in the presence of jamming signals[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS). 2014: 1-13.
[6] Buck T M, Wilmot J, Cook M J. A high G, MEMS based, deeply integrated, INS/GPS, guidance, navigation and control flight management Unit[C]//IEEE/ION Position, Location, and Navigation Symposium. 2006: 772-794.
[7] Lashley M, Bevly D M. Performance comparison of deep integration and tight coupling[J]. Navigation, 2013, 60(3): 159-178.
[8] Salmon D C, Bevly D M. An exploration of low-cost sensor and vehicle model solutions for ground vehicle navigation[C]//IEEE/ION Position, Location, and Navigation Symposium. 2014: 462-471.
[9] Han H, Wang J, Wang J L, et al. Performance analysis on carrier phase-based tightly-coupled GPS/BDS/INS integration in GNSS degraded and denied environments[J]. Sensors, 2015, 15(4): 8685-8711.
[10] Luo Y, Babu R. Double-filter model with modified Kalman filter for baseband signal pre-processing with application to ultra-tight GPS/INS integration[J]. GPS Solutions, 2012, 16(4): 463-476.
[11] Jamal S Z. Tightly coupled GPS/INS airborne navigation system[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27(4): 39-42.
[12] Guo Yao, Wu Wenqi, Tang Kang-hua. A new inertial aid method for high dynamic compass signal tracking based on a nonlinear tracking differentiator[J]. Sensors, 2012, 12(1): 7634-7647.
[13] Qin F, Zhan X Q, Zhan L. Performance assessment of a low-cost inertial measurement unit based ultra-tight GPS/INS integration for high dynamic applications[J]. IET Radar, Sonar and Navigation, 2014, 8(7): 828-836.
[14] 高帥和, 趙琳. 不同GPS/SINS超緊組合框架的分析與等價性推導[J]. 中國慣性技術學報, 2011, 19(5): 571-574. Gao Shuai-he, Zhao Lin. Analysis and equivalence derivation of different ultra-tight coupled navigation structures[J]. Journal of Chinese Inertial Technology, 2011, 19(5): 571-574.
[15] Luo Y, Wu W Q, Babu R, et al. A double-filterstructure based COMPASS/INS deep integrated navigation system implementation and tracking performance evaluation[J]. Science China Information Sciences, 2012, 57(1): 1-14.
[16] Liu G, Guo M F, Zhang R, et al. Hardware-implementable vector tracking loop for GNSS/INS deep integration[J]. Journal of Chinese Inertial Technology, 2015, 23(2): 189-195.
Analysis on mutual coupling method and feature of nonlinear information in multi-source ultra-tight integration with different structures
XIE Fei1, ZHAO Jing2, QIAN Wei-xing1, KANG Guo-hua
(1. School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing 210042, China; 2. School of Automation, Nanjing University of Posts and Telecommunications, Nanjing 210023, China; 3. Jiangsu Key Laboratory of 3D Printing Equipment and Manufacturing, Nanjing 210042, China; 4. Microsatellite research center, Nanjing University. of Aeronautics & Astronautics, Nanjing 210016, China)
The core technique in ultra-tightly coupled INS/GNSS is mutual coupling in deep level for INS navigation solution and nonlinear loop measurements in GNSS receiver baseband signal processing. This paper analyzes the non-coherent and coherent ultra-tight integration algorithms based on studying the feature of multi-source ultra-tight integration with different structures and mutual coupling mechanism. The estimation methods of observation vector and loop models are summarized. The information processing procedure and NCO (Numerical control oscillator) controlled methods in ultra-tight integration are designed. Simulation tests are carried out to compare the performances of non-coherent and coherent ultra-tight integration algorithms under signal interference and dynamic variation environments. Test results indicate that the coherent method can provide better performances in observation-vector-extraction and anti-jamming than the non-coherent method.
ultra-tight integration; integrated navigation; GNSS receiver; anti-jamming
U666.1
:A
2016-09-05;
:2016-11-29
國家自然科學基金(61601228,61403210);江蘇省自然科學基金(BK20161021,BK20141453,SBK201343261);江蘇省三維打印裝備與制造重點實驗室項目(BM2013006)資助開放課題(3DL201607);江蘇省高校自然科學基金(15KJB510016)
謝非(1983—),男,博士,講師,從事衛星導航與組合導航技術的研究。E-mail: xiefei@njnu.edu.cn
1005-6734(2016)04-0517-07
10.13695/j.cnki.12-1222/o3.2016.04.017
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
