永磁復合電機的DTC風力發電系統研究初探
2016-04-22 10:02:50朱江
中小企業管理與科技·中旬刊 2016年3期
關鍵詞:風力發電
朱江

摘 要:本文基于一種利用磁齒輪原理的新型電機,進行直接轉矩發電控制。該電機具有低速、大轉矩的運行特點,適合低速直驅風力發電系統。直接轉矩控制不同于矢量控制,具有魯棒性強、轉矩動態響應快、控制結構簡單等優點。
關鍵詞:風力發電;磁齒輪電機;直接轉矩控制;磁鏈計算
風力發電目前已經得到了廣泛的應用,越來越受到世界各國的重視,我國風能資源豐富,可開發利用的風能儲量約10億kW,我國在風力發電方面也投入了較多的人力和物力,已經建成了一些具有一定規模的風力發電場。隨著風力發電產業的發展,相關技術支撐顯得越來越重要了,發電系統作為風力發電的主要核心部分起著至關重要的作用,本文的研究對象是永磁復合電機的DTC風力發電系統,文章主要從三個方面作了介紹。
1 直接轉矩控制
1.1 直接轉矩控制原理
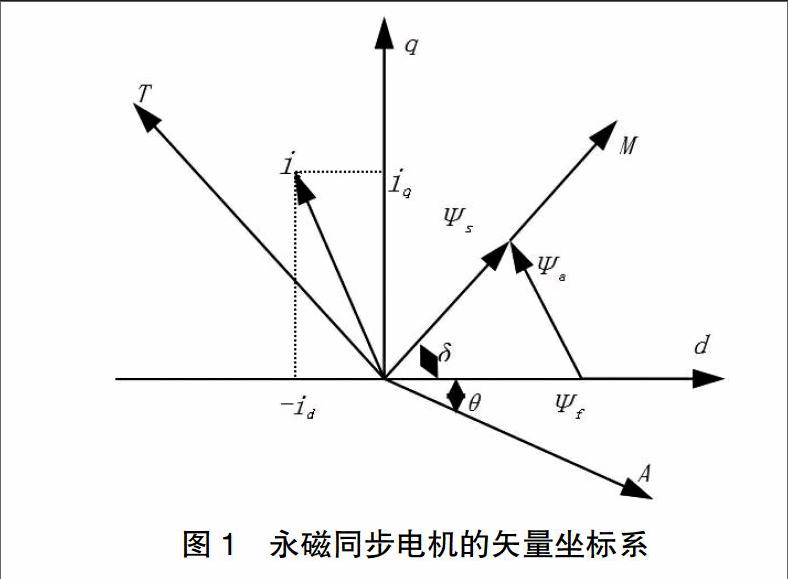
永磁同步電機的電磁轉矩取決于定子交、直軸電流,還沒有達到完全解耦。為此需要進行坐標變換解耦,需要坐標變換解耦,求出在以定子磁鏈Ψs方向為M軸的M、T坐標系的永磁同步電機的轉矩方程。圖1為永磁同步電機M、T坐標系及d、q坐標系的關系圖及電動機各向量。圖中,A為定子A相繞組軸線,Ψs為定子磁鏈,該磁鏈包括定子電流產生的磁鏈Ψa和永磁磁鏈Ψf 。
永磁同步電機輸出轉矩與定子磁鏈幅值、永磁磁鏈幅值及定轉子磁鏈夾角δ的正弦成正比。在實際運行中,保持定子磁鏈幅值為額定值,以充分利用電機的鐵心,永磁同步電機的轉子磁鏈幅值也為恒值,要改變電機轉矩的大小,可以通過改變定、轉子磁鏈夾角的大小來實現,這就是直接轉矩控制理論的指導思想。
當實際電磁轉矩小于給定時,應選擇使磁鏈沿原方向旋轉的電壓矢量,由于電機的機電時間常數遠大于電磁時間常數,使得定子磁鏈瞬時轉速變得比轉子轉速快,造成定轉子磁鏈之間的夾角瞬時增加,轉矩迅速增大,反之亦然。這樣空間電壓矢量選擇,使得定子磁鏈不停地進進退退,瞬時改變功率角,使轉矩得到快速動態控制。
1.2 磁齒輪電機直接轉矩控制系統的實現
1.2.1 磁齒輪原理
磁齒輪電機是利用調磁環對內外磁場進行調制的,分析其磁場時可以分三步進行計算,第一步計算沒有調磁環作用時,繞組建立的外部磁場,第二步計算調磁環對磁場的調制函數,第三步在第一步、第二步基礎上計算實際的外部磁場。
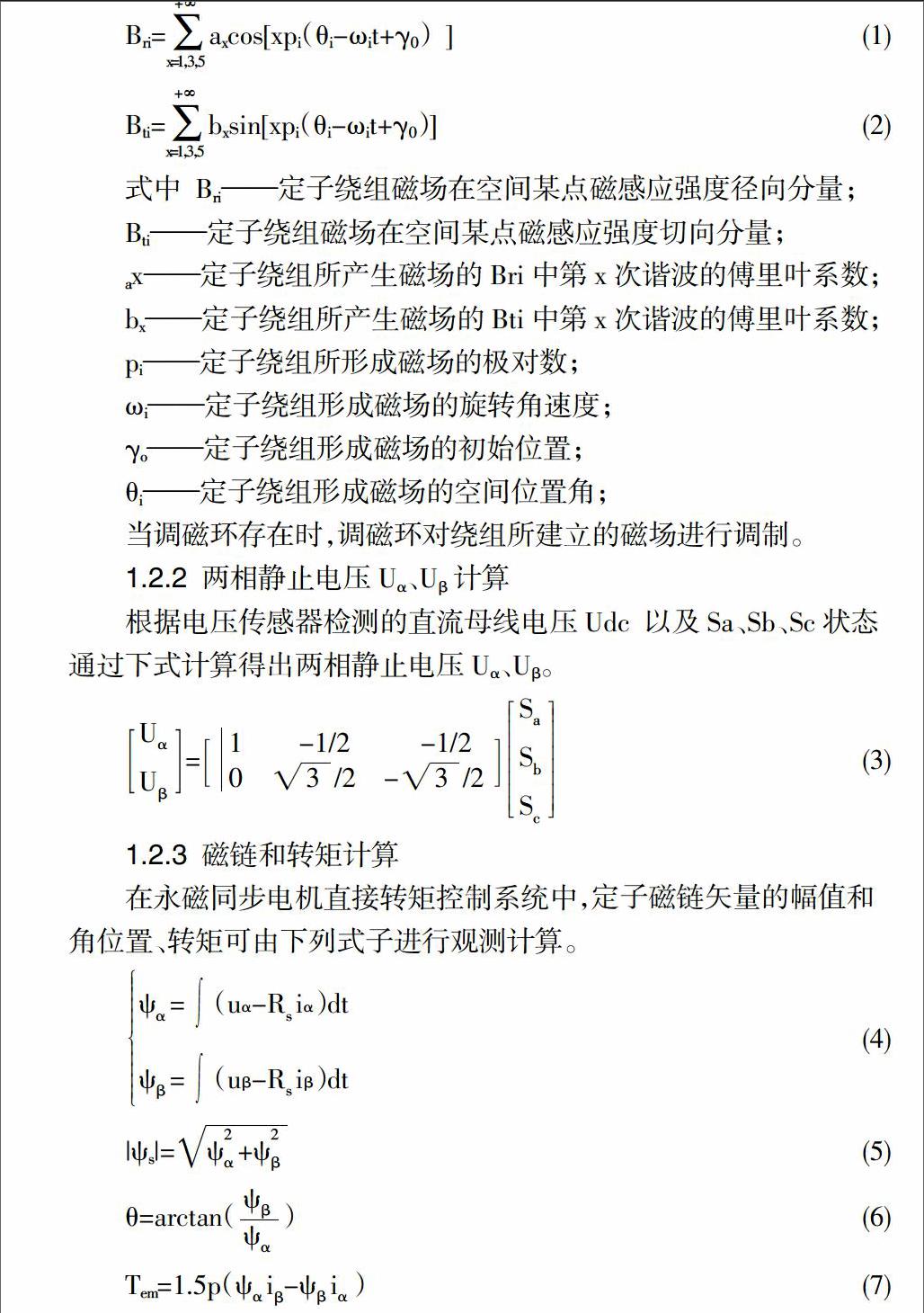
當不存在調磁環時,定子繞組在外層空間建立的磁場可表示為[5]:
Bri=axcos[xpi(θi-ωit+γ0) ](1)
Bti=bxsin[xpi(θi-ωit+γ0)] (2)
式中 Bri——定子繞組磁場在空間某點磁感應強度徑向分量;
Bti——定子繞組磁場在空間某點磁感應強度切向分量;
ax——定子繞組所產生磁場的Bri中第x次諧波的傅里葉系數;
bx——定子繞組所產生磁場的Bti中第x次諧波的傅里葉系數;
pi——定子繞組所形成磁場的極對數;
ωi——定子繞組形成磁場的旋轉角速度;
γo——定子繞組形成磁場的初始位置;
θi——定子繞組形成磁場的空間位置角;
當調磁環存在時,調磁環對繞組所建立的磁場進行調制。
1.2.2 兩相靜止電壓Uα、Uβ計算
根據電壓傳感器檢測的直流母線電壓Udc 以及Sa、Sb、Sc狀態通過下式計算得出兩相靜止電壓Uα、Uβ。
U
U=1 -1/2 -1/2
0
/2
-/2
S
S
S (3)
1.2.3 磁鏈和轉矩計算
在永磁同步電機直接轉矩控制系統中,定子磁鏈矢量的幅值和角位置、轉矩可由下列式子進行觀測計算。
ψ
=(uα
-Riα)dt
ψ
=
(uβ
-Riβ)dt (4)
|ψs|= (5)
θ=arctan() (6)
Tem=1.5p(ψiβ-ψi) (7)
綜上所述,風力發電低速直驅永磁同步電機的控制過程可描述為:風力帶動風輪轉動,通過風速檢測裝置檢測風速,并將風速信號送入MPPT最大風力跟蹤控制系統,永磁同步發電機安裝位置檢測系統將轉速信號檢測送入MPPT最大風力跟蹤控制系統,利用公式計算出最佳葉尖速比λ,功率系數是葉尖速比λ的函數,將風力機系統的Cp和λ函數關系曲線存入系統,對于一個葉尖速比λ,查表得出對應的功率系數Cp,利用公式計算出風機的輸入功率,則T=P/ω,從而得出發電機的輸入轉矩。
風力機只有運行到一個特定的速度下才會有最高的效率,最大風能跟蹤的過程中,在漿距角一定的情況下,總有一個最佳的功率系數對應一個最佳的葉尖速比λopt ,此時風機效率最高,通過檢測裝置檢測風速,在風速已知的情況下,可以利用最佳葉尖速比計算出最佳轉速,將計算出的最佳轉速送入直接轉矩控制系統,利用PI轉速調節器控制發電機轉速始終跟隨最佳轉速,保持發電機轉速的穩定。將檢測裝置檢測出的直流母線電壓以及發電機定子電流送入轉矩和磁鏈觀測器,利用公式計算出磁鏈幅值,電磁轉矩實際值,以及位置信息,PI轉速調節器計算出電磁轉矩的給定值與計算出的實際電磁轉矩進行滯環調節,通過控制電壓矢量來實現控制定轉子磁鏈夾角的變化,從而減小或增加電磁轉矩來實現滯環控制。與此同時對磁鏈也進行滯環控制,其控制方式與對轉矩控制相似,都是通過選擇電壓矢量來實現其滯環控制,保持磁鏈基本保持在一個恒定值上下小幅波動。
2 磁鏈觀測器的實現
本文采用一種新的方法解決磁鏈計算當中存在的問題,電壓法計算磁鏈依據式(4)進行建模,程序實現時一般采用低通濾波器(LPF)代替積分器進行計算,磁鏈觀測器采用二級低通濾波器,加入積分進行動態修正。相對于一級低通濾波器而言,二級濾波器可以更準確的逼近真實的磁鏈計算相位,相位誤差會較大幅度減小,同時也會使得計算出的磁鏈幅值與真實值更加接近。加入積分器主要為了消除對電機感應電動勢采樣過程帶有的直流偏置,該積分模塊通過轉速計算出積分周期,前端通過滯環比較出積分周期個數k, k個電周期積分一次,根據傅里葉變換,該方法可以計算出二級濾波后信號帶有的直流分量,然后在而二級濾波后信號中去除直流分量,得出不含有直流分量的、相位以及幅值較精確磁鏈計算結果。
η= (8)
η>1+γ or γ<1-γ k=k1 (9)
1-γ<η<1+γ k=k2(10)
式中γ為滯環寬度系數,ω為電角速度,ω*為給定轉速計算出的角速度,η為二者的比例系數,反映出電機的旋轉狀況,也可以反映出電機是處于穩態運行,還是動態調整的過程中,當第一式成立時電機處于動態調整過程中,此時積分周期個數k應取較少的個數k1,當第二式成立時電機正處于穩態運行,此時積分周期個數k可以取較大的個數k2。從該種算法中看出,該算法更加適于轉動慣量較大的電機,尤其是當電機穩態運行時,效果更加明顯。
3 結論
本文針對一臺磁齒輪電機,將直接轉矩控制算法應用到其風力發電控制系統當中,對其進行了理論分析、仿真測試、實驗測試。通過本文研究得出和驗證以下結論:
①磁齒輪電機具有低速大轉矩特性,因為其有磁場調制功能,所以在運行當中,相對于普通的永磁電機,有較高的轉矩電流比。
②針對磁齒輪電機,MATLAB/Simulink 仿真和實驗結果驗證了所提直接轉矩控制方法的有效性,利用DSP編寫控制程序的實驗過程中,體現出了DTC簡潔明了、易于程序實現的特點。
③本文提出了一種新的磁鏈計算方法,該方法易于編程化實現,通過實際的控制,驗證了該方法的可行性。
參考文獻:
[1]劉英培.PMSM直接轉矩控制方法及實驗研究[D].天津:天津大學, 2010.
[2]韓學棟.電動汽車用新型永磁復合輪轂電機控制系統研究[D].南京:東南大學,2012.
[3]袁登科,陶生桂等編著.交流永磁電機變頻調速系統[M].北京:機械工業出版社,2011.
[4]賈紅云.磁通切換型高性能永磁電機研究[D].南京:東南大學,2011.
猜你喜歡
東方教育(2016年13期)2017-01-12 22:44:43
中小企業管理與科技·上旬刊(2016年12期)2017-01-05 00:09:51
科學與財富(2016年29期)2016-12-27 13:52:53
電子技術與軟件工程(2016年19期)2016-12-19 18:14:17
中國市場(2016年32期)2016-12-06 11:06:23
價值工程(2016年31期)2016-12-03 00:07:43
中小企業管理與科技·下旬刊(2016年11期)2016-11-18 08:18:07
科技視界(2016年16期)2016-06-29 17:02:02
商(2016年12期)2016-05-09 10:38:04
科技視界(2016年8期)2016-04-05 08:56:22
