一體化槳舵裝置造型設計及水動力計算方法研究
2016-04-22 09:27:51陳如星肖能齊周瑞平
船電技術 2016年2期
楊 震,陳如星,肖能齊,周瑞平
(武漢理工大學 能源與動力工程學院,武漢 430063)
?
一體化槳舵裝置造型設計及水動力計算方法研究
楊 震,陳如星,肖能齊,周瑞平
(武漢理工大學 能源與動力工程學院,武漢 430063)
摘 要:以一體化槳舵裝置為分析對象,詳細論述了該裝置的造型設計及水動力計算方法。通過MATLAB計算模型的空間坐標,實現模型的建立及運動學仿真。基于MATLAB和TurboGrid劃分螺旋槳周圍的流體網格,以ANSYS CFX分析不同槳舵裝置的水動力性能,比較了不同水動力計算結果,為一體化槳舵裝置水動力計算提供了基本思路。
關鍵詞:一體化槳舵裝置 造型設計 水動力
0 引言
一體化槳舵裝置是一種組合式推進系統,與普通槳舵裝置的不同在于:一體化槳舵裝置通過轂帽以及正后方流線形舵球的配合,大大改善槳轂處的水流情況,消除轂渦,從而充分利用槳后渦流的能量,有效提高螺旋槳的效率。
IMO已確定船舶能效設計指數EEDI于2013 年1月1日起生效實施,國內已在同一時間開始執行。一體化槳舵裝置作為優化EEDI的創新技術受到了越來越廣泛的關注。Wartsila的一體化槳舵裝置Energopac被應用于集裝箱船,滾裝船以及多用途工作船等。實踐表明,在設計航速下使用該裝置能夠節約2~9%的能量消耗。Roll-Royce的一體化槳舵裝置Promas能夠提高6~8%的推進效率,若為低速船舶,其推進效率提高值最大可達15%。目前主要通過模型試驗和數值模擬分析一體化槳舵裝置的水動力性能及其影響因素,研究工作集中于優化槳舵的水動力干擾,改善螺旋槳尾流場的流動情況。由于模型試驗成本較高且條件嚴格,難以對一體化槳舵裝置的設計個案進行操作,因此數值模擬方法得到了推廣運用。近年來,基于粘流理論的螺旋槳CFD數值模擬技術得到了快速發展,被普遍應用于螺旋槳流場、水動力性能分析以及船-槳干擾問題的計算。
文中綜合考慮了一體化槳舵裝置的設計及其水動力性能計算,為一體化槳舵裝置總體設計提供了依據。
1 造型設計方法
一體化槳舵裝置包括:螺旋槳、槳轂、轂帽、帶舵球的舵,其中舵球前伸與槳轂外形形成光順連接。
一般地,舵的剖面設計采用NACA型對稱機翼剖面。一體化槳舵裝置中舵球是以槳軸線為中心線的流線型回轉體,舵球的縱向剖面為對稱機翼,其前端接近半球體。舵球的幾何參數包括:舵球的直徑、長度、舵球翼型,其中舵球長度是指舵球前端沿槳軸線到舵葉導邊的距離。舵球的位置參數為舵球與螺旋槳轂帽的間距。
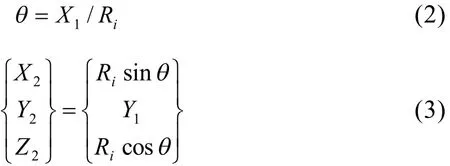
根據NACA型值表[1],將舵葉剖面型值以建模軟件可識別的截面參數文件導入軟件中為舵的三維模型提供截面基本參數,通過拉伸操作完成舵的三維建模。鑒于舵在轉動過程中應避免與槳轂發生干涉,應選取與轂帽曲率相匹配的舵球直徑以及舵球長度。舵球可選取與舵葉相同的翼型作為舵球的翼型參數。按照上述幾何參數可得到舵球剖面,通過旋轉操作完成舵球的三維建模。將舵與舵球模型合并可得到帶有舵球的舵,如圖1所示。
螺旋槳的三維設計是利用槳葉的基本投影原理將二維的槳葉剖面變換為空間的槳葉切面曲線。在變換過程中需借助螺旋槳的側斜角、螺距角和縱斜角三個特征角度(其中側斜角已固化在槳葉剖面型值坐標上),利用相應的變換矩陣將槳葉剖面坐標旋轉或移動相應的特征角度,最終得到空間的槳葉切面曲線。
設螺旋槳型值表中槳葉各截面上的型值點坐標為(X0,Y0,Z0),Y軸為螺旋槳軸向且指向船艏,利用螺距角變換矩陣可將剖面型值點旋轉一定的螺距角。設螺旋槳的螺距角為φ,坐標變換之后的坐標點為(X1,Y1,Z1),則螺距角變換矩陣如式(1)所示。
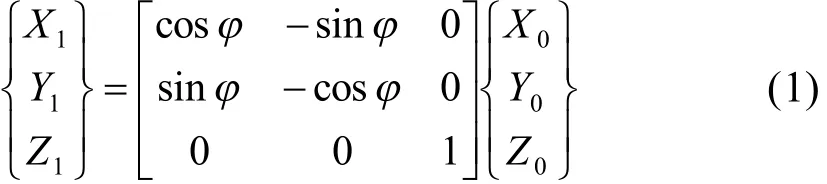
槳葉某一剖面的半徑為Ri,利用包絡變換矩陣可將剖面上的點轉換到相應半徑處的圓柱面上。包絡變換矩陣如式(3)所示。
若槳葉的縱斜角ψ不為零,則可對包絡的剖面進行移動,則縱斜角變換矩陣如式(4)所示。

通過上述變換矩陣可得到螺旋槳各剖面的真實空間坐標,將坐標以三維建模軟件可識別的截面參數文件導入軟件中為螺旋槳三維模型提供截面基本參數。按照點、線、面、體的建模思路生成螺旋槳三維模型,如圖2所示。
圖1 舵及舵球模型
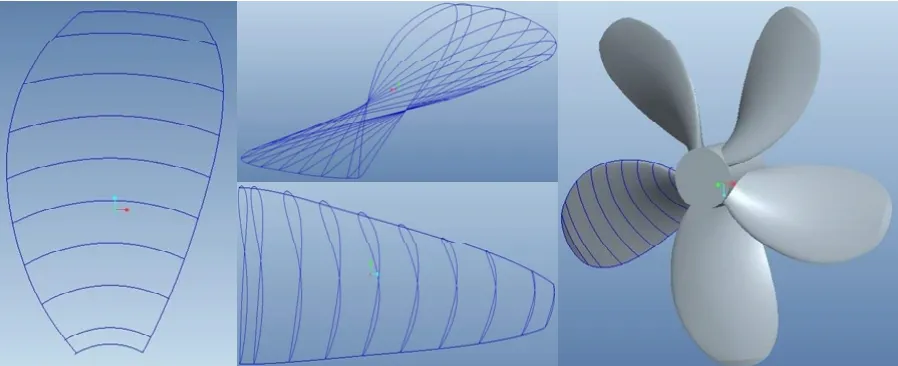
圖2 螺旋槳模型
將舵模型和螺旋槳模型按照舵球的位置參數進行裝配,得到一體化槳舵裝置。如圖3所示。利用運動學仿真軟件LMS Virtual Lab Motion驗證一體化槳舵裝置中舵球與槳轂之間不發生干涉,舵與螺旋槳均能正常工作,因此一體化槳舵裝置設計合理。

圖3 一體化槳舵裝置右舷和左舷
2 計算基本流程
如圖4所示,一體化槳舵裝置的水動力計算主要由以下五步驟組成。
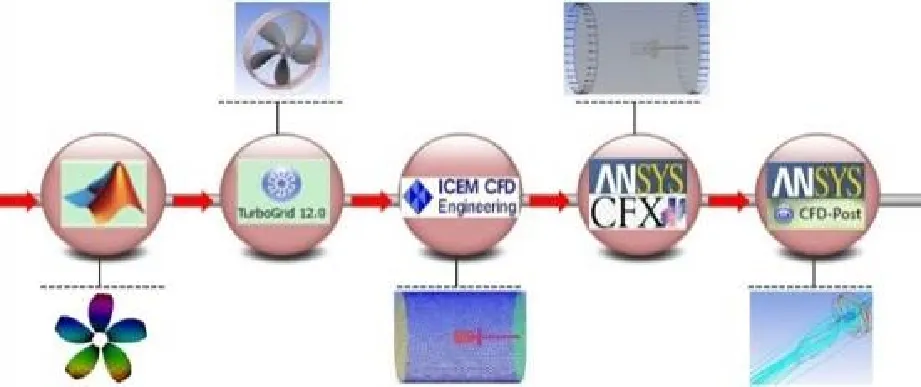
圖4 槳舵裝置水動力分析流程圖
1)根據現有的螺旋槳及舵的圖譜資料,利用MATLAB計算得到螺旋槳在不同半徑截面處的關鍵點和舵在不同剖面處的關鍵點;
對于螺旋槳,將上述各截面的型值點導出為TurboGrid可識別的特征文件,包括profile.curve、hub.curve、shroud.curve,在TurboGrid中建立螺旋槳三維模型;對于舵,將以上坐標作為中間文件導入三維建模軟件Pro/E中。
2)根據螺旋槳基本參數建立的特征文件,利用TurboGrid劃分包含螺旋槳的旋轉域網格;
3)根據舵的基本參數,利用Pro/E建立舵的三維模型,以中間文件的格式導入到網格劃分軟件ICEM中,利用ICEM劃分流體靜態域的CAE網格;在ICEM軟件中將上述的旋轉域網格和靜態域網格合并成CFD的計算網格;
4)在CFX軟件中導入由ICEM軟件生成的CFD計算網格,建立相應的邊界條件,確定相應的求解方法,分別進行水動力分析計算;
5)在CFD-Post中進行結果分析。
本文借助模型實驗及水動力計算數據[3,4],針對表1中的槳舵模型進行水動力計算方法研究。
3 水動力計算模型
基于直角坐標系建立計算模型,Y軸方向與水流方向相反,Z軸與舵的弦展方向一致,X軸方向滿足右手坐標系原則。取舵球直徑為槳徑之比為0.28,長度為55 mm,舵球前端與轂帽最小間距為5 mm。
3.1網格劃分
槳舵裝置的水動力分析需基于一定的計算域,包括螺旋槳及舵外的等效無限流場空間。依據相關文獻,采用與螺旋槳同軸的圓柱形計算域,取圓柱的直徑與螺旋槳直徑D之比為5:1,圓柱體的長度l與螺旋槳直徑的比值為7.5:1,上游速度入口設定在2.5D處,下游壓力出口設定在5D處,具體如圖5所示。

表1 槳及舵幾何參數
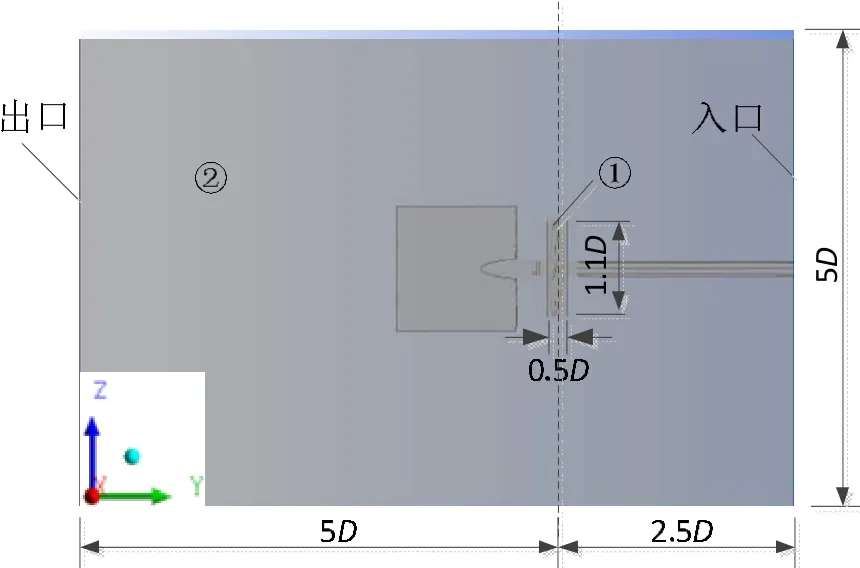
圖5 計算域分布
將計算域劃分成外部和內部區域,外部計算域(②區)包括舵以外的流場空間,主要反應了螺旋槳及舵的來流和尾流情況,在遠離螺旋槳及舵的區域水流速度及壓力變化并不劇烈,因此可劃分較粗的網格,其他部分需劃較密的網格。該區域采用ICEM劃分結構化網格。內部計算域(①區)包括螺旋槳以外的流場空間,為較好地反映槳葉導邊、隨邊及葉梢形狀,采用旋轉機械網格劃分軟件TurboGrid,生成高質量的結構化網格。其中外部計算域網格為靜態網格,稱作靜態域;內部計算域為動態網格,采用多重旋轉坐標系(MRF)模型,稱作動態域。
3.2邊界條件與求解設定
靜態域包含流體的入口、出口、無限流場空間壁面、舵及舵球的外壁面、螺旋槳傳動軸的外壁面、槳轂的外壁面以及靜態域與動態域網格之間的交界面。動態域包含螺旋槳槳葉壁面以及及靜態域與動態域網格之間的交界面。通過建立靜態域與動態域交界面的連接關系,連接靜態網格和動態網格。船模在試驗過程中,水池的最高進速可達3m/s,故選定螺旋槳的轉速為750 r/min,計算系統在J=0.1~0.8下的水動力情況。
CFD計算過程中以CFX作為求解工具,選用能較好處理旋轉問題的RNG k-e湍流模型[5],對流方式為High Resolution,收斂殘差為10-3[6,7]進行求解。
4 水動力分析結果與比較
通過上述計算模型及求解條件的設定,計算得到槳-舵裝置的水動力結果。通過CFD-Post提取螺旋槳軸向推力(Fyp,N)、螺旋槳軸向轉矩(Typ,N·m)、舵的推力(Fyr,N)。為計算槳舵裝置的水動力性能,利用無因次系數分別表示其推力系數Kt、轉矩系數Kq和效率η等,如式(5)~(8)所示。
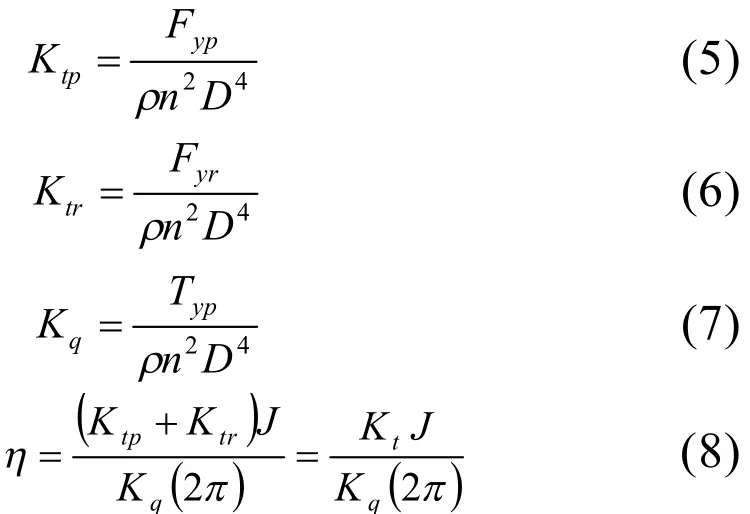
式中,Ktp為螺旋槳產生的推力系數;ρ為水流密度,單位為kg/m3;n為螺旋槳轉速,單位為r/s;Ktr為舵產生的推力系數;Kq為槳轉矩系數,槳舵裝置轉矩系數。
4.1普通槳舵裝置的定常性能計算結果驗證
ANSYS CFX擁有適用于不同復雜程度的多種湍流模型,如k-ε模型、RNG k-ε模型、k-ω模型、剪切壓力SST模型等。選取不同的湍流模型預報J=0.5時普通槳舵的定常水動力性能,并將槳的敞水效率計算值與實驗值(η0=0.602)進行比較,如表2所示。其中η1和η2是采用相同的普通槳舵計算模型,其區別在于η1模型中靜態域采用四面體網格,網格總數為624485,η2模型中靜態域采用六面體網格,網格總數為552720個。從表2可知,采用RNG k-ε模型得到的效率值與實驗值的偏差最小并能夠滿足計算要求。因此采用RNG k-ε模型,靜態域為六面體網格進行下一步計算。
為證明本文所提出的水動力計算模型及結果的準確性,按照前述方法建立普通槳舵的水動力模型,計算該模型在J=0.1~0.8下的水動力性能,并將結果與實驗值進行比較,如圖6。由于實驗值只有槳的敞水效率,進行驗證的數據較少,因此將槳舵裝置計算結果與文獻所給的計算值相比較[4],如圖7所示。

表2 湍流模型對效率的影響
對于效率而言,本文計算值與實驗值的偏差在0.7~5%之間(J=0.7時為11%),隨著J的增加偏差越來越大。對于槳舵裝置的推力系數Kt、轉矩系數Kq以及效率η而言,數值計算結果與文獻所給數值吻合性較好。因此模型具有較好的計算精度,計算方法可行。
4.2一體化槳舵裝置水動力性能研究
為研究一體化槳舵的水動力性能,將其與普通槳舵的水動力計算值進行比較分析,如圖8所示。
從圖8可知,在不同J下,一體化槳舵裝置的扭矩系數與普通槳舵基本一致,但槳的推力系數略有增加。隨著J的提高,增加的幅度逐漸減小。這是由于一體化槳舵中舵球填充了螺旋槳后方的空間有利于削弱槳后方軸線處的低壓區,減小螺旋槳后方葉根處的水流速度,增加了螺旋槳的推力。

圖7 普通槳舵裝置水動力比較分析
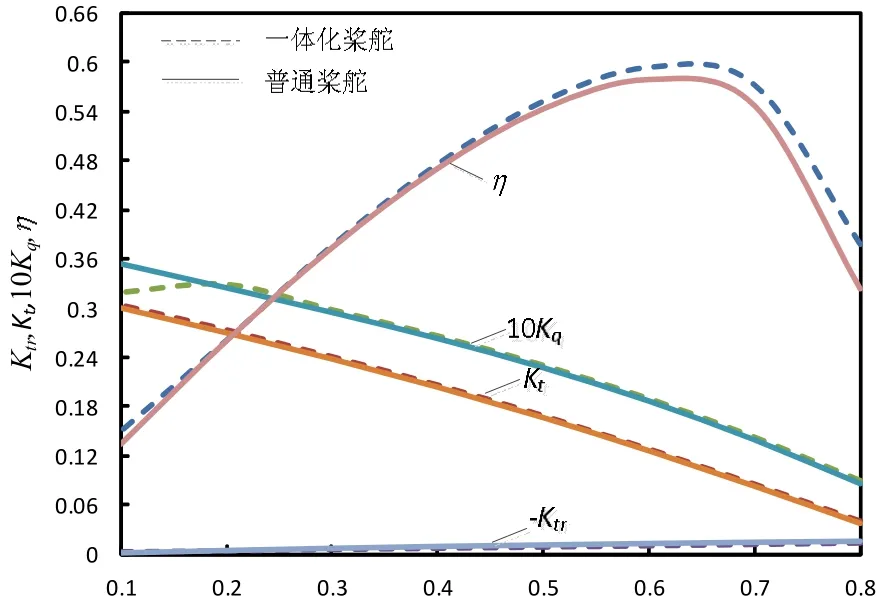
圖8 不同槳舵裝置水動力比較分析
從圖9和圖10可知通過在槳轂處流線形轂帽以及轂帽正后方的流線形舵球的配合,能夠大大改善槳轂處的水流情況。空泡筒的實驗研究表明,舵球能夠消除或減少槳轂帽后部的水流分離,減少粘壓阻力。因此一體化槳舵裝置是通過改善螺旋槳后水流狀態,減少槳后渦的形成并充分利用槳后渦流能量,從而提高螺旋槳的效率,實現節能。計模型中舵只受到阻力的作用,因此在舵的推力系數前增加負號,如圖10所示。一體化槳舵裝置不僅增加了槳的推力,同時減少了舵的阻力作用,因此一體化槳舵裝置的總體效率得到提高,在不同進速系數下效率的增加值為0.3~5%,具體數值如表3所示。
表3中,Kt0、Kq0、η0表示普通槳舵裝置的水動力系數;Kt1、Kq1、η1分別表示一體化槳舵裝置的水動力系數;?η表示效率增加幅度。

圖9 普通槳舵右舷和左舷的壓力及流線分布(J=0.6)

圖10 一體化槳舵右舷和左舷的壓力流線分布(J=0.6)

表3 不同槳舵裝置的水動力比較
5 結論
本文以一體化槳舵裝置為分析對象,詳細論述了一體化槳舵裝置的造型設計及水動力計算分析過程。在造型設計過程中,基于螺旋槳的投影原理,利用MATLAB計算得到槳、舵及舵球的真實空間坐標。通過三維建模及運動學仿真軟件完成一體化槳舵裝置造型設計,驗證了設計的合理性。基于MATLAB與TurboGrid直接劃分包含螺旋槳的旋轉域網格,快速得到CAE分析所需的高質量結構化網格。
在水動力分析過程中,總結了利用ANSYS CFX進行一體化槳舵裝置水動力分析方法。通過比較普通槳舵裝置及一體化槳舵裝置的水動力分析結果的差異可知,該計算方法能夠準確預報一體化槳舵裝置的水動力性能。文中的造型設計及水動力計算分析為一體化槳舵裝置總體設計提供了一定的理論指導。
參考文獻:
[1]王獻孚.船用翼理論[M].北京:國防工業出版社,1998.
[2]Carlton J S.Marine propellers and propulsion[M].Second edition,Netherlands:Elsevier Ltd,2007.
[3]張大有,逢吉春.襟翼舵舵球技術研究[J].武漢交通科技大學學報,1997,21(6):596-598.
[4]何苗,王超,郭春雨等.舵球幾何參數對螺旋槳水動力性能的影響[J].武漢理工大學學報,2011,68-72.
[5]王超,何苗,郭春雨等.一體化節能推進裝置定常水動力性能的數值模擬分析[J].哈爾濱工程大學學報,2013,674-679.
[6]朱俊飛,周瑞平,林雨等.導管螺旋槳水動力與結構強度計算方法研究[J].造船技術,2012,39-45.
[7]ANSYS.ANSYS CFX-Solver Modeling Guide[R].ANSYS,Inc.2012.
[8]John Carlton.Marine Propellers and Propulsion.[M].Burlington:Elsevier Ltd,2nd edition 2007:277-278.
[9]Maruo,H,Ikchate,Moand Ando,M.Theoretical Prediction of Unsteady Propeller Characteristic in the Non-Uniform Wake Field[C].United States.Office of Naval Research.15th Symposium on Naval Hydrodynamic.1984:261-275.
[10]鄭巢生,張志榮.基于OpenFOAM的螺旋槳敞水性能預報方法[J].中國艦船研究,2012,7(3):30-35.
[11]Model Test Report for the 92500t Bulk-Cargo Ship[R].Wuxi:Deep Tank of China Ship Scientific Research Center.2007.
Design and Hydrodynamic Simulation for Integrated Propeller-rudder System
Chen Ruxing,Zhou Ruiping,Xiao Nengqi,Zhou Ruiping
(School of Energy and Power Engineering,Wuhan University of Technology,Wuhan 430063,China)
Abstract:The approach of design and hydrodynamic simulation is dealt with in detail for the integrated system in this paper.The spatial coordinates for the model is calculated by MATLAB.With the tool of CAD software,the three-dimensional model and kinematics simulation is obtained.The CAE grid around propeller is accomplished based on MATLAB and TurboGrid.Hydrodynamic performance of different system is performed in ANSYS CFX.The result is analyzed with each other.It provides a common method to analyze the hydrodynamic performance for integrated propeller-rudder system.
Keywords:integrated propeller-rudder system; design; hydrodynamic
作者簡介:楊震(1994-),男,研究方向:船舶動力裝置系統性能分析及振動噪聲控制技術;陳如星(1989-),男,碩士,研究方向:船舶動力裝置系統性能分析及振動噪聲控制技術;肖能齊(1987-),男,博士研究生,研究方向:船舶動力裝置系統性能分析及振動噪聲控制技術;周瑞平(1964-),男,教授/博士生導師,研究方向:船舶動力裝置系統性能分析及振動噪聲控制技術。
基金項目:國家自然科學基金(No.51479154)/國家科技支撐計劃(No.2014BAG04B02)
收稿日期:2015-12-24
中圖分類號:U664.2
文獻標識碼:A 文章標號:1003-4862(2016)02-0008-05