改進的PID控制算法及MATLAB仿真分析
2016-04-24 09:05:04高淑芝張萌柴梓晴
河南科技 2016年17期
高淑芝張 萌柴梓晴
(1.沈陽化工大學信息工程學院,遼寧 沈陽 110142;2.北京理工大學計算機學院,北京 100081)
改進的PID控制算法及MATLAB仿真分析
高淑芝1張 萌1柴梓晴2
(1.沈陽化工大學信息工程學院,遼寧 沈陽 110142;2.北京理工大學計算機學院,北京 100081)
PID控制器具有可靠性高、魯棒性好、結構簡單、易于實現等優點。基于此,介紹PID控制技術的發展和研究進程,提出一種自整定參數的專家模糊PID控制算法。結果顯示,此方法在調節時間、穩定性和抑制超調量方面都要優于一般的抗積分飽和控制法。
PID控制;模糊PID;控制算法
PID控制器以結構簡單、可靠性高、穩定性強、調整方便,被作為主要的工業控制技術之一[1]。然而,因為此方法具有非線性、時不變確定性,在實際生產過程中不容易建立精確的數學模型。因此,應用常規PID控制器不易達到理想控制效果。
本文介紹了傳統PID控制算法,在課本學習基礎上改進傳統算法,并提出關于模糊參數的自整定方法。此方法要求確定對象模型,并且通過實踐將得到的知識模型化,最后通過推理將參數進行最優調整。
1 數字PID控制算法
數字PID控制器應用于計算機控制系統中,此方法一般分PID位置型控制算法和PID增量型控制算法。
1.1 PID位置型控制算法
計算機控制系統是由采樣時刻的偏差值來計算控制量的,必須將積分和微分項離散化處理。依照模擬PID控制算法公式,將采樣時刻點作為連續時間t,將和式作為積分,將增量作為微分,得到近似變換,再經簡化得到離散PID表達式:

1.2 PID增量型控制算法
如果控制量中增量被執行機構所需要,由式(1)推導PID增量型控制公式:

再將式(1)減去式(2)后,可得:

而PID增量型控制因為積分階段的大效應導致靜態誤差的存在等一些缺點,因此在選擇時需慎重。
1.3 改進PID控制算法
由于傳統的PID控制算法存在許多不足,因此,需要運用其他算法與傳統的PID控制方法相結合的方法,使傳統PID控制器得到改進。
1.3.1 不完全微分控制算法。PID控制算法的微分作用比較靈敏,使系統振蕩,調節能力下降。若想改變這種現象,需要將傳統PID控制算法中加入低通濾波器在整個PID控制器之后,得到不完全微分PID控制算法,從而改進系統性能。
對于不完全微分結構,其傳遞函數為:

將式(4)離散化,并進行最終整理得到:

式(5)中,Ts為采樣時間,ks為比例系數,TI為積分時間常數,TD為微分時間常數,Tf為濾波器系數。
仿真結果表明:在引入不完全微分之后,解決了傳統PID控制算法的不足,由于其控制特性優于傳統PID控制算法,因此被廣泛應用于工業中。
1.3.2 微分先行控制算法。微分先行控制特點為:只需將輸出量進行微分,所以給定值變化時輸出量不變,然而被控量變通常比較緩和。當給定值有頻繁變化時,運用微分先行控制算法就可以避免給定值頻繁變化導致的系統不穩定,改善系統的動態性能。
1.4 模糊PID控制算法研究
模糊控制是運用模糊語言變量、模糊集合論及模糊推理作為基礎的一種計算機智能控制方法,構成模糊控制器的是微機或單片機,應用計算機程序來完成大多數功能。
1.4.1 模糊推理系統機構。模糊PID控制系統是在傳統的PID控制的基礎上,將反饋值與目標值間的誤差以及誤差變化率作為系統的輸入,運用模糊推理法對PID的參數在線自整定,滿足不同反饋值與目標值間的誤差和誤差變化率對控制器參數的不同要求,從而使被控對象具有良好的靜態及動態特性。
1.4.2 PID參數在線整定規則。PID參數的整定規則如下:①當|e|較大的情況下,應選擇較小的kD,ki=0和較大的kp,這樣使得系統的跟蹤性能強,而且由于將積分作用進行了限制,因此避免了較大超調的出現;②當|e|中等大小的情況下,應選擇較小的kp,以降低響應超調量。注意kD值的選擇對系統響應影響作用很大,ki值的選取也要適當;③當|e|較小的情況下,kp和ki都要選擇較大值,這樣可以使系統的穩定性有所提高,此時遵循|ec|的大小選擇kD的值,當|ec|較大的情況下,kD應選擇較小值,當|ec|較小的情況下,避免系統發生振蕩,應選擇較大的kD值。
2 改進模糊PID算法的MATLAB仿真
2.1 改進模糊PID控制算法研究
本文運用2個輸入(e、ec)、3個輸出(kp、ki、kd)的形式來設計模糊PID控制器,其中模糊集均為{負大,負中,負小,零,正小,正中,正大},簡記為{NB,NM,NS,ZO,PS,PM,PB},模糊集上論域為系統誤差e以及誤差變化率ec的變化范圍,[-3,-2,-1,0,1,2,3]是(e、ec)的論域,[-6,-4,-2,0,2,4,6]是(kp、ki、kd)的論域,通過專業人士的技術和實踐經驗,建立合適的模糊規則表[2]。
建立kp、ki、kd的模糊規則表后,進行kp、ki、kd的自適應校正,正態分布下e、ec和kp、ki、kd均服從,可得到各模糊自己的隸屬度,通過模糊合成推理從而設計出PID參數模糊矩陣表。
2.2 MATLAB仿真
設被控對象:

采樣時間是0.5ms,將模糊PID控制進行階躍響應,在第420個采樣時間(0.2s)時控制器輸出上加2.5的干擾,仿真結果如圖1所示。
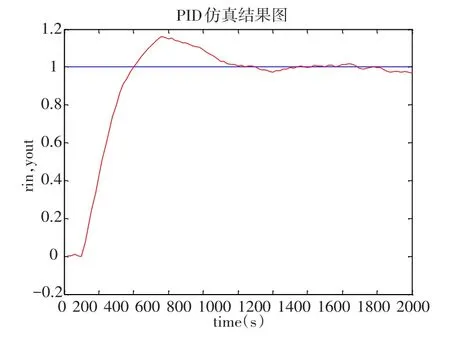
圖1 模糊PID控制階躍響應曲線
根據仿真結果可以看出,采用模糊控制PID的算法,調節時間更快,能夠迅速地達到穩定時間。在工業用途上大大地滿足了各類精度及穩定性能方面控制的需求。
3 結論
本文提出一種自整定參數專家模糊PID控制方法,并進行仿真分析。結果表明,這種改進的PID控制算法在抑制超調量、調節時間、穩定性方面優于傳統PID控制算法。
[1]劉金錕.先進PID控制MATLAB仿真[M].2版.北京:電子工業出版社,2006.
[2]鄭阿奇.MATLAB實用教程[M].北京:電子工業出版社,2004.
Improved PID Control Algorithm and MATLAB Simulation Analysis
Gao Shuzhi1Zhang Meng1Chai Ziqing2
(1.School of Information Engineering,Shenyang University of Chemical Engineering,Shenyang Liaoning 110142;2.School of Computing,Beijing Institute of Technology,Beijing 100081)
PID controller has the advantages of high reliability,simple structure,easy implementation and so on. Based on this,the development of PID control technology and research process were introduced,a self-tuning param?eter fuzzy PID control algorithm was proposed,the results showed that this method is superior to the general anti windup control method in the aspects of adjusting time,stability and restraining overshoot.
PID control;fuzzy PID;control algorithm
TP18
A
1003-5168(2016)09-0034-02
2016-08-21
高淑芝(1968-),女,博士,教授,研究方向:化工過程建模與智能控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
