磁懸浮慣性穩定平臺方位軸控制與實現
2016-04-26 08:54:28葉濤丁楠于嘯男丁祝順
科技視界 2016年9期
葉濤 丁楠 于嘯男 丁祝順
【摘 要】磁懸浮慣性穩定平臺利用磁懸浮軸承使方位內框懸浮在慣性穩定平臺,消除了機械接觸。針對磁懸浮無機械接觸的特點,改進原傳統機械軸承的驅動設計。介紹磁懸浮穩定平臺的系統組成,就磁懸浮方位軸端摩擦隨機力矩小等特點,設計了方位軸端的三閉環控制回路。使用無刷直流力矩電機作為系統的傳動裝置,避免有刷電機電刷和換向器帶來的干擾。采用無接觸式的光柵尺作為方位軸的測角裝置,模擬無刷電機的換向器。通過穩定精度測試,驗證方案具有較高的穩定精度。
【關鍵詞】磁懸浮穩定平臺;驅動設計;控制回路;光柵尺
Realization And Control for Azimuth Axis of magnetic levitation inertial stabilization platform
YE Tao1,2 DING Nan2 YU Xiao-nan2 DIGN Zhu-shun2
(1.School of Information and Communication Engineering, North University of China, Taiyuan Shanxi 030051, China;
2.Beijing Aerospace Control Institute, Beijing 100039, China)
【Abstract】Maglev intertial stabilization platform utilizes magnetic bearings to make orientation within the frame suspended in inertial stabilization platform, eliminating mechanical contact. For maglev no mechanical contact characteristics, improved drive design traditional mechanical bearings. Introduced maglev system intertial stabilization platform composed of inertial stabilization platform on manegnetic levitation bearing shaft friction torque characteristics of small random designed bearing shaft of three closed-loop control circuit. Brushless DC torque motor as a transmission system to avoid interference brush motor brush and commutator brought. Using the non-contact grating ruler as bearing shaft Angle measuring device,simulation of the brushless motor commutator. By steady accuracy test, verification scheme has higher stable precision.
【Key words】Magnetic levitation stabilized platform; Draven design; Control circuit; Grating ruler
0 引言
穩定平臺系統是航空遙感系統重要組成部分[1],其主要的作用:隔離載體運動對遙感相機的干擾;實時提供遙感相機的時間、位置和姿態等信息;為遙感相機保持對地垂直及方位保持。而磁懸浮穩定平臺則是利用磁懸浮軸承使得方位內框懸浮在穩定平臺內,消除機械接觸,以避免摩擦力矩所產生的隨機干擾,提高了定軸精度[2],在高精度的航空遙感平臺中由廣闊的應用前景。本文先介紹了磁懸浮穩定平臺的工作原理及組成結構,在結合磁懸浮穩定平臺中方位軸懸浮的特點,設計了磁懸浮穩定平臺方位軸三閉環控制回路和硬件控制系統,在三框架三軸穩定平臺上能夠實現了較高的穩定精度。
1 磁懸浮穩定平臺工作原理
磁懸浮穩定平臺系統主要由慣性穩定平臺、磁懸浮軸承、有效載荷、POS(高精度定位定向系統)、外部解算系統組成。POS平臺系統和有效載荷安裝在方位軸上,方位軸和慣性穩定平臺的連接是通過磁懸浮軸承無機械接觸式連接,慣性穩定平臺通過減震器安裝在飛行器上。
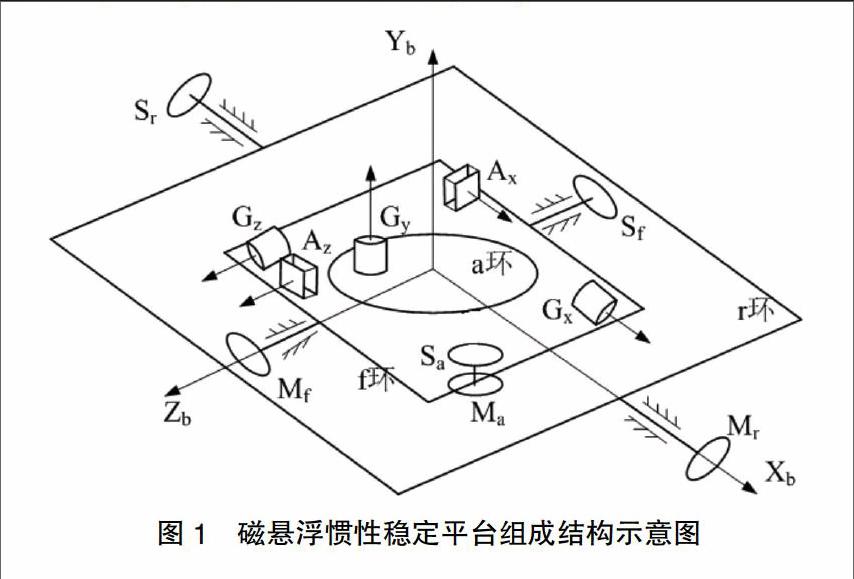
磁懸浮穩定平臺三軸框架結構:方位框架、俯仰框架、橫滾框架。其示意圖如圖1所示。有效遙感載荷和POS系統安裝在平臺的方位框內,通過磁懸浮軸承與穩定平臺的俯仰環連接。俯仰環和橫滾環的連接方式則是通過機械軸承連接。穩定平臺俯仰環和橫滾環作用是抑制飛行載體俯仰和橫滾運動對遙感相機產生的干擾,保持遙感相機光軸與當地地垂線重合。方位內框的作用是抑制飛行載體偏航角運動對遙感相機的干擾,保持遙感相機對準某一航向。
圖1 磁懸浮慣性穩定平臺組成結構示意圖
俯仰環和橫滾環是傳統的機械軸承連接,因此在電機驅動設計通過旋轉變壓器測量平臺的旋轉角度,FPGA利用角度信息模擬霍爾信號,產生換向表。在DSP計算控制環路產生PWM實現電機的驅動控制。然而由于方位框架作為磁懸浮軸承的轉子,和軸端無機械接觸,因此在其控制回路的設計和方位軸旋轉角度的測量等都需要更加深入的研究。
2 方位軸控制原理
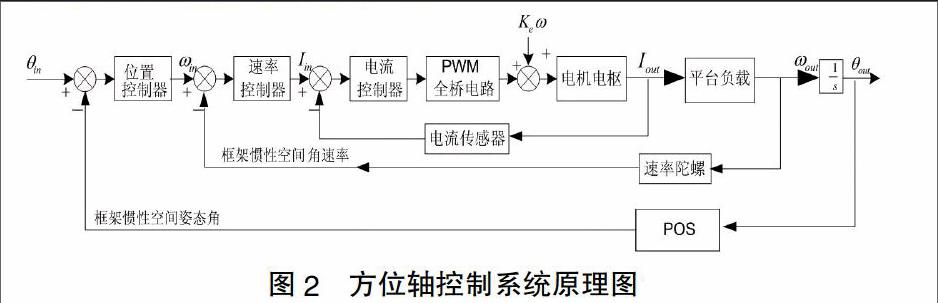
根據磁懸浮無機械接觸,摩擦力矩小,定軸精度高等特點,因此電機的控制系統采用三閉環控制回路,即電流環、速率環和位置環的控制結構。其控制原理圖如圖2所示。
圖2 方位軸控制系統原理圖
電流回路通過電流傳感器獲取電樞電流信號,與電流給定值進行動態比較,以抵消負載轉矩作用以及慣量變化所帶來的影響[3]。
速率回路通過速率陀螺獲取框架運行的角速率,得到的轉速信號作為速率環控制器的負反饋,與轉速參考值進行比較,產生適當的電流參考值來控制后續閉合的電流環。其主要目的是隔離基座干擾角運動。
位置環是整個伺服系統設計的關鍵,主要是利用POS獲取遙感相機的姿態信號,得到的姿態信號作為位置控制器的負反饋,位置控制器輸出的值與陀螺測量值進行復合,通過電流控制器產生驅動電流,使力矩電機帶動相機框架進行相應補償運動,調整相機姿態。其主要目的是驅動平臺跟蹤參考航向。
3 方位軸控制系統硬件設計
由于方位軸的無接觸的特性,因此為避免有刷電機電刷帶來的干擾,本文選用的是永磁同步無刷直流電機。無刷電機換向表的產生,采用角度傳感器獲得位置信息,通過位置信息模擬電機的霍爾換向表。角位置傳感器采用無接觸式的光柵尺。而速率、姿態角的測量則是通過安裝在方位框內的MEMS陀螺和高精度的POS系統測量,電流反饋量的測量是通過安裝在電機上的電流傳感器獲取。然后在DSP中進行控制環路的計算,產生電機控制的PWM波,經功率放大后與換向表共同控制無刷直流電機。
3.1 FPGA測角系統
磁懸浮穩定平臺方位軸的測角裝置采用光柵尺位移傳感器,其輸出為數字脈沖信號,具有檢測范圍大、檢測精度高、響應速度快、無物理接觸等特點。光柵尺主要是由讀數頭、主尺和接口組成。主尺安裝在方位軸上,通過摩爾條紋原理測量方位軸端角位移[4]。光柵尺選用英國Renishaw公司的增量式RGH22系列,其光柵尺柵距為20μm,通過數字細分后可以實現數字分辨率達到1μm。
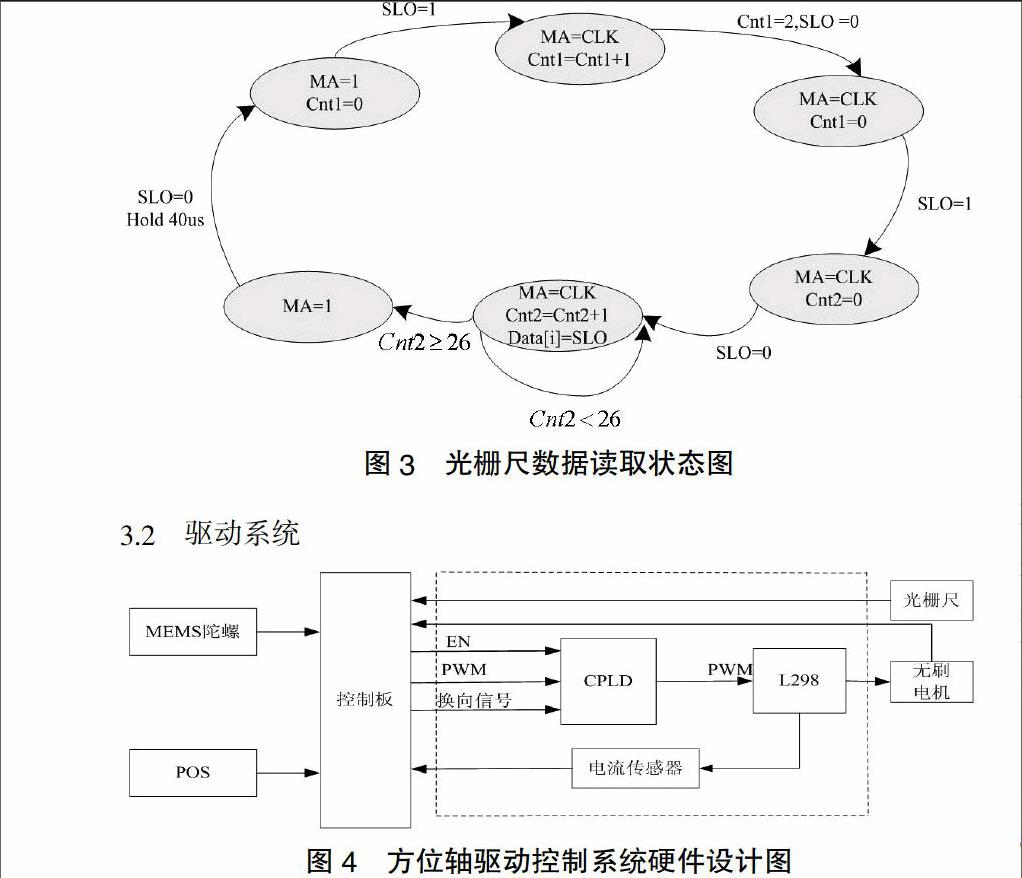
光柵尺一般采用BiSS-C串行通信協議進行編碼。BiSS協議是為了從編碼中器獲得位置數據一種快速同步串行通信協議。該通信波特率可以達到10Mbps,它是由兩對差分信號線組成:MA和SLO[5]。MA是主機給從機的時鐘信號;SLO是從機到主機傳輸位置數據,同步于MA。因此在硬件電路設計時可以采用差分轉化芯片Max3290,轉成FPGA可使用的TTL電平信號。圖3為FPGA讀取光柵尺的狀態轉化圖。取MA的時鐘信號為2MHz,Cnt1為CLK賦值給MA時開始計數MA上升沿次數;Cnt2和i的取值相同。此狀態轉換讀取位置量為18位、1位錯誤位、1位警告位和6位CRC校驗位,數據讀取結束后需保持40us的低電平,才能進行下一次數據的采集。
圖3 光柵尺數據讀取狀態圖
3.2 驅動系統
圖4 方位軸驅動控制系統硬件設計圖
方位電機驅動系統設計方案如圖4所示。控制系統以CPLD為核心器件,接收控制板發來換向信號、PWM和使能信號EN,發送給電機驅動芯片L298實現無刷電機的換向和轉速的控制。
控制板FPGA通過電流傳感器采集電機電樞電流信號、通過MEMS陀螺采集方位軸的旋轉角速率信號、通過POS平臺系統采集到有效載荷的姿態角信息、通過光柵尺采集方位軸旋轉的角度信號根據角度信號。FPGA將采集到的電流、速率、姿態等信息,通過并口發送給DSP,通過串口發送給上位機。DSP運算穩定回路的控制運算,得到控制電機的PWM信號,實現回路的穩定控制。上位機將采集數據進行直觀的顯示。
3.3 軟件系統開發
方位軸控制系統的軟件開發分為FPGA和DSP兩部分的進行.FPGA采用的是Xilinx公司的ISE9.1設計,DSP采用的是TI公司的CCS3.3進行軟件開發。具體的開發流程圖如圖5所示。
(a)FPGA軟件開發流程圖 (b)DSP軟件開發流程圖
圖5 系統軟件開發流程圖
4 結論
本文首先介紹了三軸磁懸浮穩定平臺的系統組成,然后就磁懸浮無機械接觸、摩擦力矩小、定軸精度高等特點,設計了磁懸浮穩定平臺方位軸端的三閉環控制回路,軸端驅動電機選擇永磁同步無刷直流電機,減少機械電刷帶來的干擾,無刷電機的換向需要位置信號模擬霍爾換向表,其中位置的測量裝置采用無機械接觸的光柵尺。最后描述方位軸的控制系統的硬件設計方案。該方案的設計能夠滿足系統的任務指標。
【參考文獻】
[1]沈穎凡,趙嬪婭,陳祖金.航空吊艙穩定平臺結構設計[J].航空兵器,2010(3):61-64.
[2]宋玉旺,韓邦成,魏學敏,房建成.大中型磁懸浮控制力矩陀螺的框架優化設計方法研究[J].載人航天,2012,18(4):1-7.
[3]王麗博.機載光電吊艙控制系統的研究及應用[D].河南科技大學,2011.
[4]姜禮杰,王勇,徐建,劉建華.基于STM32微處理器的光柵信號處理方法的研究[J].機床與液壓,2014,42(7):56-58.
[5]肖鯤,王莉娜.基于FPGA的BiSS協議關電編碼器通信模塊設計[J].電子測量技術,2008,31(7):188-191.
[責任編輯:王楠]
