混合動力汽車轉(zhuǎn)矩模糊控制器的設(shè)計
2016-05-03 03:38:22長春工程學(xué)院電氣與信息學(xué)院郭慕瑤蔣夢瑩高馨方
電子世界 2016年7期
長春工程學(xué)院電氣與信息學(xué)院 張 允 郭慕瑤 蔣夢瑩 高馨方
?
混合動力汽車轉(zhuǎn)矩模糊控制器的設(shè)計
長春工程學(xué)院電氣與信息學(xué)院張允郭慕瑤蔣夢瑩高馨方
【摘要】為了實現(xiàn)對混合動力汽車狀態(tài)切換過程的協(xié)調(diào)控制,需要對汽車總轉(zhuǎn)矩需求進(jìn)行合理分配。本文基于模糊控制理論,設(shè)計了轉(zhuǎn)矩模糊控制器,并利用Matlab仿真軟件對采用模糊控制器優(yōu)化前后的轉(zhuǎn)矩分配結(jié)果進(jìn)行了仿真,仿真結(jié)果表明所設(shè)計的轉(zhuǎn)矩模糊控制器能夠借助于電機(jī)的快速響應(yīng)特性補償發(fā)動機(jī)轉(zhuǎn)矩輸出時間常數(shù)大,響應(yīng)速度慢的缺陷,實現(xiàn)了駕駛員需求轉(zhuǎn)矩在發(fā)動機(jī)與電機(jī)之間的合理分配。
【關(guān)鍵詞】混合動力汽車;轉(zhuǎn)矩;模糊控制器;Matlab仿真
0 引言
當(dāng)混合動力汽車的工作模式發(fā)生改變時,發(fā)動機(jī)和電機(jī)的工作狀態(tài)亦隨之改變。但由于發(fā)動機(jī)和電機(jī)的動態(tài)特性存在差異,在工作模式切換過程中,易造成對動力輸出的不利影響。因此,如何獲得電機(jī)的實時動態(tài)轉(zhuǎn)矩,并以該轉(zhuǎn)矩為基礎(chǔ),協(xié)調(diào)發(fā)動機(jī)轉(zhuǎn)矩輸出,從而將駕駛員需求轉(zhuǎn)矩在發(fā)動機(jī)與電機(jī)之間合理分配,以保證工作模式切換過程中動力傳遞的平穩(wěn)性是對混合動力汽車狀態(tài)切換過程進(jìn)行協(xié)調(diào)控制的一個關(guān)鍵問題。
1 模糊控制器的設(shè)計
模糊控制是以模糊集理論、模糊語言變量和模糊邏輯推理為基礎(chǔ)的一種智能控制方法,適用于對無法用準(zhǔn)確數(shù)學(xué)模型描述的對象或過程進(jìn)行控制。混合動力汽車能量管理系統(tǒng)具有高度非線性和不確定性的特征,因此非常適合使用模糊邏輯來控制[1-5]。
1.1模糊控制器的結(jié)構(gòu)
本文所設(shè)計的模糊控制器的主要功能是依據(jù)駕駛員轉(zhuǎn)矩需求和電池SOC變化情況,實時調(diào)節(jié)發(fā)動機(jī)和電動機(jī)轉(zhuǎn)矩分配。因此模糊控制器對應(yīng)有駕駛員的轉(zhuǎn)矩需求Td_req和電池 SOC二個輸入變量及電機(jī)的轉(zhuǎn)矩需求Tm_req這一個輸出變量。模糊控制器的結(jié)構(gòu)圖如圖1所示。

圖1 模糊控制器結(jié)構(gòu)圖
1.2精確量的模糊化
1.2.1將精確量對應(yīng)的論域轉(zhuǎn)化為模糊量對應(yīng)的論域
本文設(shè)定所有輸入、輸出變量的模糊論域范圍均為[0,1]。駕駛員轉(zhuǎn)矩需求的論域轉(zhuǎn)換關(guān)系為:

電池 SOC 由于本身取值范圍就在[0,1]區(qū)域中,因此不需要論域轉(zhuǎn)換處理。電機(jī)輸出轉(zhuǎn)矩需求的論域轉(zhuǎn)換關(guān)系為:

1.2.2確定各個模糊子集及其隸屬函數(shù)
確定輸入/輸出變量的隸屬函數(shù),就是根據(jù)專家知識將輸入/輸出變量的模糊論域劃分為若干個模糊子集,每個模糊子集又有一個相應(yīng)的隸屬函數(shù)與之對應(yīng)。針對第一個輸入變量駛員轉(zhuǎn)矩需求Td_req,本文將其劃分為NB、NS、Z、PS和 PB共5個模糊子集。在NB集合,發(fā)動機(jī)效率很低,此時要求發(fā)動機(jī)關(guān)閉。在NS集合,發(fā)動機(jī)驅(qū)動車輛并通過主動充電來提高負(fù)荷。在Z集合,發(fā)動機(jī)單獨工作。在PS集合需要電動機(jī)功率輔助。在PB集合,發(fā)動機(jī)輸出最大轉(zhuǎn)矩,同時電動機(jī)功率輔助。第二個輸入變量電池SOC,被劃分為NB,N,Z和P共4個模糊子集。在NB集合電池組需強(qiáng)制充電。在N集合電池組可以放電,同時請求主動充電。在Z集合主動充電完成,電池組既可以放電又可以回收制動能量。在P集合,電池組可以放電,但禁止充電。同理建立輸出變量Tm_req的5個模糊子集,分別是:NB、NS、Z、PS、和 PB。在NB集合純電動。在 NS集合發(fā)動機(jī)驅(qū)動并發(fā)電。在Z集合,電機(jī)關(guān)閉。在PS集合,需要電動機(jī)功率輔助。在PB集合,發(fā)動機(jī)輸出最大轉(zhuǎn)矩。
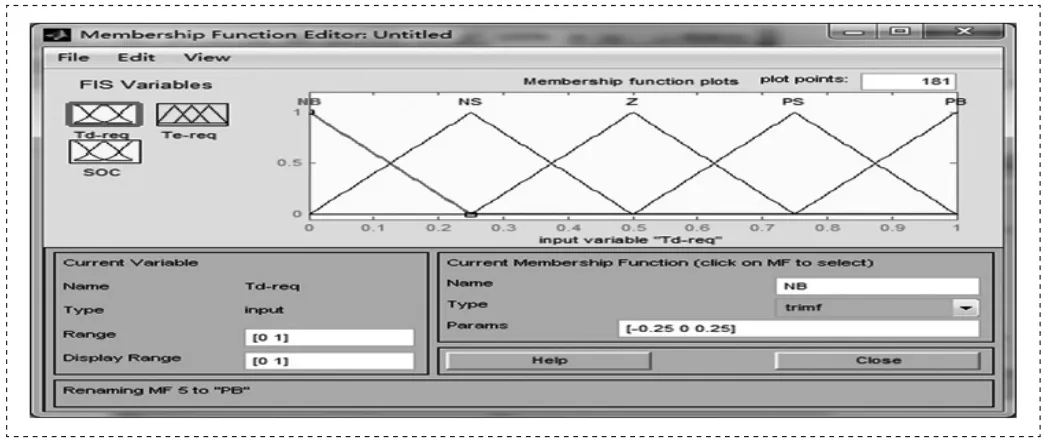
圖2 Td_req的隸屬度函數(shù)仿真曲線
駕駛員轉(zhuǎn)矩需求Td_req、電池 SOC值、電機(jī)輸出轉(zhuǎn)矩Tm_req的論域和模糊子集確定后,需要進(jìn)一步對各模糊子集確定相應(yīng)的隸屬度函數(shù)。對于輸入變量Td_req的各模糊子集,本設(shè)計全部采用三角形隸屬函數(shù)。各隸屬函數(shù)的參數(shù)分別為:[-0.25 0 0.25],[0 0.25 0.5],[0.25 0.5 0.75],[0.5 0.75 1],[0.75 1 1.25]。同理電池 SOC對應(yīng)的各模糊子集隸屬函數(shù)的參數(shù)為:[ -0.3333 0 0.3333],[0 0.3333 0.6667 ],[0.3333 0.6667 1],[0.6667 1 1.333]。對于輸出變量Tm_req,其中NB模糊子集,本設(shè)計分別采用z型隸屬函數(shù);NM、NS、Z、PS模糊子集,本設(shè)計采用三角形隸屬函數(shù);PB模糊子集,本設(shè)計采用S型隸屬函數(shù),且各隸屬函數(shù)的參數(shù)分別為:[0 0.2],[0 0.25 0.5],[0.25 0.5 0.75],[0.5 0.75 1],[0.8 1]。則駕駛員轉(zhuǎn)矩需求Td_req、電池 SOC值、電機(jī)輸出轉(zhuǎn)矩Tm_req的隸屬度函數(shù)分別見圖2-圖4。

圖3 SOC值的隸屬度函數(shù)仿真曲線

圖4 Tm_req的隸屬度函數(shù)仿真曲線
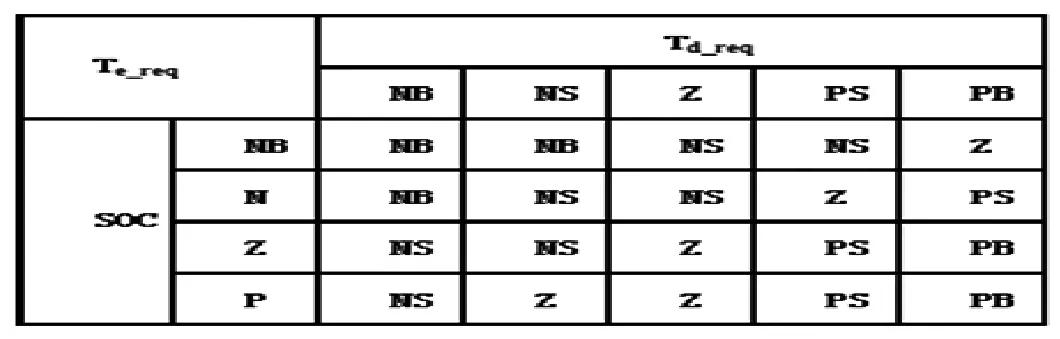
表2 模糊控制規(guī)則表
1.3建立模糊控制規(guī)則進(jìn)行模糊推理
依據(jù)分析,由于駕駛員轉(zhuǎn)矩需求Td_req采用了5個語言值、電池 SOC值采用了4個語言值,所以本系統(tǒng)共有20條模糊規(guī)則。根據(jù)經(jīng)驗構(gòu)建模糊規(guī)則,如表2所示。進(jìn)一步依據(jù)模糊控制規(guī)則進(jìn)行模糊推理得到輸出模糊集合C。

1.4反模糊化
通過模糊推理得到的結(jié)果是一個模糊集合,還需進(jìn)一步將其轉(zhuǎn)化為精確量。本次設(shè)計中采用的是加權(quán)平均法進(jìn)行反模糊化:

2 仿真結(jié)果及分析
我們采用UDDS行駛路況,分別將模糊控制算法優(yōu)化前后的轉(zhuǎn)矩控制器嵌入到混合動力客車模型中進(jìn)行仿真,仿真結(jié)果如圖5所示。
圖5與圖6分別為模糊控制算法優(yōu)化前后轉(zhuǎn)矩分配結(jié)果,由圖可見,經(jīng)模糊控制算法優(yōu)化后,發(fā)動機(jī)的輸出轉(zhuǎn)矩變化相對減小,電動機(jī)輸出轉(zhuǎn)矩變化相對加大,系統(tǒng)借助于電機(jī)的快速響應(yīng)特性補償了發(fā)動機(jī)轉(zhuǎn)矩輸出時間常數(shù)大,響應(yīng)速度慢的缺陷。

圖5 傳統(tǒng)控制器的轉(zhuǎn)矩分配結(jié)果

圖6 采用模糊控制器后轉(zhuǎn)矩分配結(jié)果
3 結(jié)論
本文基于模糊控制理論設(shè)計了混合動力汽車轉(zhuǎn)矩模糊控制器,利用Matlab仿真軟件對各模糊子集的隸屬函數(shù)及采用模糊控制器優(yōu)化前后的轉(zhuǎn)矩分配結(jié)果進(jìn)行了仿真,仿真結(jié)果表明所設(shè)計的轉(zhuǎn)矩模糊控制器用能夠?qū)崿F(xiàn)由電動機(jī)轉(zhuǎn)矩進(jìn)行補償以調(diào)節(jié)發(fā)動機(jī)轉(zhuǎn)矩的目標(biāo),使總轉(zhuǎn)矩需求得到了合理分配,實現(xiàn)了對混合動力汽車狀態(tài)切換過程的協(xié)調(diào)控制。
參考文獻(xiàn)
[1]Chen,Ze-Yu,Zhao,Guang-Yao.Fuzzy control strategy and simulation for dual electric tracked vehicle motion control[C].IEEE International Conference on Mechanical and Electronics Engineering ,Shenyang,2012,309-312.
[2]Sch.of Autom.,Peirong Xia,Denghua Li,Jingbo Zhao. Research on intelligent vehicle steering control based on fuzzy control[C].IEEE International Conference on Electronic Measurement and Instruments,Beijing,2011,1611-1614.
[3]Li,Junwei,Jiang,Hui.The study of vehicle stability based on fuzzy control[C].IEEE International Conference on Materials Engineering and Automatic Control,Jinan,2012,562-564.
[4]Xu,Bin,Li,Ming,Yang,Shichun,Guo,Bin,Cui,Haigang.Design and simulation of fuzzy control strategy for parallel hybrid electric vehicle[C].IEEE International Conference on Intelligent System Design and Engineering Application,Changsha,2011,539-543.
[5]Li,Yongming,Tong,Shaocheng,Li,Tieshan.Adaptive fuzzy output feedback control of nonlinear uncertain systems with unknown backlash-like hysteresis based on modular design[J].Neural Computing and Applications,2013,23(1):261-270.
張允(1973-),女,吉林長春人,博士研究生,副教授,研究方向:混合動力汽車智能控制。
作者簡介:
基金項目:吉林省教育廳基金《混合動力客車多目標(biāo)綜合協(xié)調(diào)控制技術(shù)研究》。
