一種用于機載防撞系統(tǒng)的接收環(huán)路自檢方法
2016-05-03 07:33:56作者鄭紅四川九洲空管科技有限責(zé)任公司
電子制作 2016年7期
作者/鄭紅,四川九洲空管科技有限責(zé)任公司
?
一種用于機載防撞系統(tǒng)的接收環(huán)路自檢方法
作者/鄭紅,四川九洲空管科技有限責(zé)任公司
文章摘要:本文公開了一種用于機載防撞系統(tǒng)ACAS收發(fā)主機的接收環(huán)路自檢方法,該方法在不增加額外的硬件設(shè)備的條件下,利用設(shè)備原有組成模塊及其固有的通信渠道配合工作,軟件編程實現(xiàn)。該方法能自動、周期性、有效地實現(xiàn)ACAS收發(fā)主機的接收環(huán)路自檢測,可完成功能模塊級故障定位,實現(xiàn)故障隔離,便于維修保障,滿足設(shè)備測試和維護(hù)需求。
關(guān)鍵詞:機載防撞、TCAS、ACAS收發(fā)主機、接收環(huán)路、自檢
1.引言
隨著國家經(jīng)濟的發(fā)展,空中交通流量大幅度增加,飛機空中危險接近的潛在可能性增加,給保證國家的飛行安全帶來了巨大的壓力。依賴地面空中交通管制來保證飛機之間的空中交通安全已難以滿足需要。機載防撞設(shè)備作為國際通用防止飛機空中危險接近、碰撞的最有效機載設(shè)備。其不依賴于地面空中交通管制系統(tǒng),在飛機發(fā)生危險接近之前,可直接向飛行員提出警告,并給出避讓建議,使飛機相互避讓,它具備的防撞功能和提供信息的時效性及準(zhǔn)確性都是地面系統(tǒng)所無法比擬的。
2.機載防撞系統(tǒng)工作原理
機載防撞系統(tǒng)(即TCAS-Traffic Alert and Collision Avoidance System)由美國聯(lián)邦航空局(FAA)定義,是防止空中飛機危險接近和相撞事故發(fā)生的必不可少的設(shè)備。TCAS主要用于為飛機提供空中安全分隔保證,系統(tǒng)采用二次雷達(dá)的方式探測附近空域的接近飛機,必要時,提醒飛行員采取規(guī)避措施以與其它飛機保持適當(dāng)?shù)陌踩g距,達(dá)到防碰撞的目的。具體來說,機載防撞設(shè)備應(yīng)具有空中交通告警/防撞、空管應(yīng)答和廣播式自動相關(guān)監(jiān)視功能。通過近幾年的飛行實踐證明,該系統(tǒng)是防止飛機空中相撞的最后一道防線,也是目前最有效的手段之一,它克服了地面空中交通管制的局限性,能提供超出地面交通管制所能提供的飛行安全保證能力,對應(yīng)付空中突發(fā)的危險接近,避免空中相撞有巨大的作用。
系統(tǒng)的ACAS收發(fā)主機通過控制天線波束指向,對飛機前、后、左、右4個區(qū)域進(jìn)行掃描詢問,附近裝有空管應(yīng)答機(S模式/ATCRBS應(yīng)答機)的飛機(以下稱為目標(biāo)機)就會做出應(yīng)答。ACAS收發(fā)主機根據(jù)收到的應(yīng)答信號,獲得目標(biāo)機的高度、相對距離、速度、方位等目標(biāo)信息,并進(jìn)而計算其高度變化率、相對距離變化率,同時結(jié)合本機的位置信息和運動信息,監(jiān)視、跟蹤目標(biāo)機,建立、更新和維護(hù)目標(biāo)航跡。將監(jiān)視和更新的目標(biāo)航跡與本機信息綜合,評估出目標(biāo)機的威脅級別(OT:其它飛機,PT:接近飛機,TA:交通告警,RA:決斷告警),從而產(chǎn)生交通咨詢,或進(jìn)一步依據(jù)威脅程度產(chǎn)生分析咨詢,防止與其它飛機發(fā)生碰撞;當(dāng)雙方都裝有防撞系統(tǒng)時,能夠通過S模式數(shù)據(jù)鏈交換防撞信息,達(dá)到相互配合避讓的目的。否則,機載防撞系統(tǒng)將引導(dǎo)本機實現(xiàn)主動避讓。

圖1 ACASII系統(tǒng)對不同類型系統(tǒng)的響應(yīng)
如果系統(tǒng)檢測到接近飛機不具有高度報告的能力,則只提供交通咨詢。
如果接近飛機沒有裝備任何類型的航管應(yīng)答機,TCAS系統(tǒng)無法獲得這類飛機的信息,進(jìn)而產(chǎn)生不了咨詢建議。TCAS系統(tǒng)對不同類型系統(tǒng)的響應(yīng)如圖1所示。
3.接收環(huán)路自檢方法
本文提出了一種用于機載防撞系統(tǒng)的ACAS收發(fā)主機接收環(huán)路自檢測方法,該方法在不增加額外的硬件設(shè)備的條件下,利用設(shè)備原有組成模塊JSCPU、FPGA、接收機模塊、譯碼模塊和FZCPU及其固有的通信渠道配合工作,軟件編程實現(xiàn),其組成框圖如圖2所示。在設(shè)備的整個工作過程中,該自檢保持1s/次的頻率周期性進(jìn)行,F(xiàn)ZCPU會將自檢故障代碼通過ARINC429總線上報給載機維護(hù)系統(tǒng),進(jìn)行故障顯示和記錄。
ACAS收發(fā)主機接收環(huán)路自檢流程如圖3所示,其具體處理流程如下:
第1步,JSCPU判斷1s定時器是否到達(dá),如果定時器到達(dá),則進(jìn)入第2步,如果未到,則繼續(xù)等待;
第2步,JSCPU通過數(shù)據(jù)總線下發(fā)C模式閉環(huán)自檢命令給編碼FPGA;FPGA收到該自檢命令后,F(xiàn)PGA編碼生成一個標(biāo)準(zhǔn)C模式應(yīng)答碼信號給接收機模塊,同時還會生出一些控制信號給到接收機模塊,包括有自檢使能信號、4個發(fā)送通道信號、4個接收通道信號和自檢混頻信號。
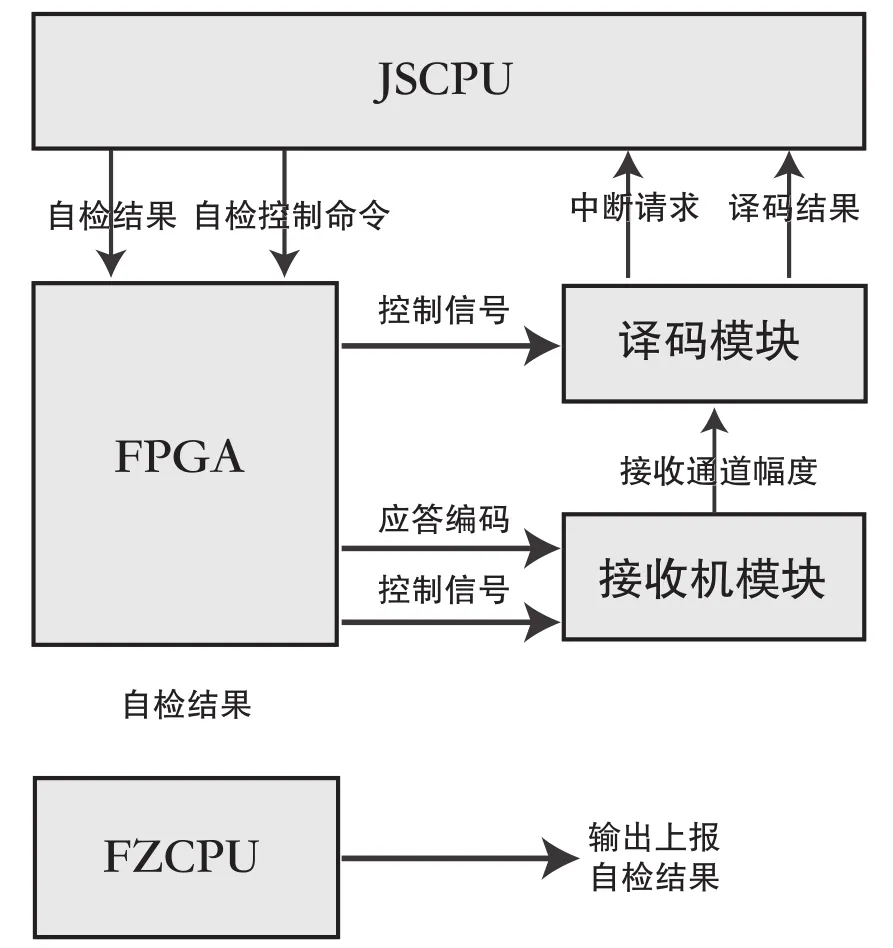
圖2 ACAS收發(fā)主機閉環(huán)自檢組成框圖
第3步,接收機模塊根據(jù)控制信號狀態(tài)把接收到的應(yīng)答碼信號經(jīng)D/A轉(zhuǎn)換成4個通道的視頻幅度信號給到譯碼模塊;譯碼模塊根據(jù)接收到FPGA的工作模式信息,判斷出系統(tǒng)工作狀態(tài),確定自己的解碼模式,同時結(jié)合距離門信號、發(fā)射框架信號和應(yīng)答碼信號解碼出相應(yīng)的譯碼信息,準(zhǔn)備好上傳JSCPU的報表數(shù)據(jù)并向JSCPU發(fā)起傳輸譯碼數(shù)據(jù)的中斷請求;JSCPU接收到該中斷請求后,根據(jù)事先約定好的報表長度,通過數(shù)據(jù)總線向譯碼模塊發(fā)起讀取譯碼數(shù)據(jù)報表的信號;
第4步,JSCPU根據(jù)接收到的譯碼數(shù)據(jù)報表,提取出飛機高度信息,并和事先約定好的飛機高度信息作比較,如果一致,則判定C模式閉環(huán)自檢正常;否則判定C模式閉環(huán)自檢故障。C模式閉環(huán)自檢結(jié)束;
第5步,JSCPU通過數(shù)據(jù)總線下發(fā)S模式閉環(huán)自檢命令給編碼FPGA;FPGA收到該自檢命令后,編碼生成一個長112位的標(biāo)準(zhǔn)S模式應(yīng)答碼,其中包含約定好的飛機相關(guān)高度,速度信息和飛機地址碼信息。同時還會生出一些控制信號給到接收機模塊,包括有自檢使能信號、4個發(fā)送通道信號、4個接收通道信號和自檢混頻信號。
第6步,重復(fù)第3步步驟;
第7步,JSCPU根據(jù)接收到的譯碼數(shù)據(jù)報表,提取出飛機的相關(guān)高度,速度信息和飛機地址碼信息,并和事先約定好的標(biāo)準(zhǔn)S模式應(yīng)答碼作比較,如果一致,則判定S模式閉環(huán)自檢正常;否則判定S模式閉環(huán)自檢故障。S模式閉環(huán)自檢結(jié)束;
第8步,JSCPU通過FPGA內(nèi)部的RAM功能模塊將該自檢結(jié)果傳給FZCPU;FZCPU將該自檢結(jié)果通過429數(shù)據(jù)格式上報綜合顯示系統(tǒng)。
通過采用以上的技術(shù)方案,可以實現(xiàn)在系統(tǒng)的整個工作階段進(jìn)行實時故障監(jiān)測,并將自檢結(jié)果上報載機維護(hù)系統(tǒng)進(jìn)行故障顯示和記錄。并且根據(jù)不同的自檢結(jié)果,可以準(zhǔn)確定位故障位置,做到有效地故障隔離,極大的提高了設(shè)備的可靠性和維修性。
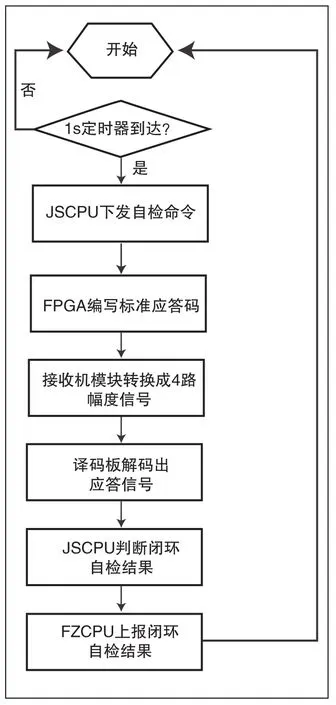
圖3 閉環(huán)自檢工作流程圖
4.結(jié)語
針對現(xiàn)有機載防撞系統(tǒng)的測試性要求,進(jìn)一步提高故障檢測和定位能力,本文提供了一種機載防撞系統(tǒng)ACAS收發(fā)主機接收環(huán)路自檢方法。該方法能自動、周期性、有效地實現(xiàn)ACAS收發(fā)主機的接收環(huán)路自檢測,可完成功能模塊級故障定位,實現(xiàn)故障隔離,便于維修保障,滿足設(shè)備測試和維護(hù)需求。同時由于該方法利用設(shè)備固有硬件資源通過軟件編程的方式實現(xiàn),無需測試設(shè)備和人工介入,有效地節(jié)省了人力、物力成本,提高了設(shè)備的測試性和維修性,便于設(shè)備生產(chǎn)和維修。
參考文獻(xiàn)
*[1] RTCA/DO—185B Minimum Operational Performance Standa rds for Traffic Alert and Collision Avoidance System II (TCAS II)
*[2]張尉.二次雷達(dá)原理[M].北京:國防工業(yè)出版社,2007.
