
無線傳感器網絡時間同步技術分析
2016-05-03 02:46:06林曉鵬
智能計算機與應用 2016年2期
摘要:時間同步是無線傳感器網絡管理的重要內容,它是無線傳感器網絡應用可以可靠運行的前提。本論文分析了無線傳感器網絡時鐘偏差的根源,闡述了同步技術的發展現狀,分別介紹了目前三種時間同步機制中的典型算法,探討了無線傳感器網絡時間同步技術領域的難題,最后提出了今后在該領域的研究方向。
關鍵詞:無線傳感器網絡;時間同步;典型算法
中圖分類號:TP311 文獻標識號:A 文章編號:2095-2163(2016)02-
The Analyzing of time synchronization technique for
Wireless Sensor Networks
LIN Xiaopeng
(Xiamen Ocean Vocational College, Xiamen,Fujian,361012, P.R.China,)
Abstract: Time Synchronization is one of important content and is definitely a prerequisite for the applications of Wireless Sensor Network. The reason of network time offset is analyzed and current research statuses of time synchronization are summarized in this paper. Three forms of typical time synchronization algorithm are discussed. Finally, the challenged and further research directions of wireless sensor networks are presented.
Keywords: WSN; Time Synchronization; Typical algorithm
0 引言
無線傳感器網絡[1](Wireless Sensors Network,WSN)是在監測區域內部署大量傳感器節點,以無線通信方式形成的單跳或多跳的自組織網絡系統,以協同感知、采集和處理監測區域中被感知對象的信息,并發送給觀察者。無線傳感器網絡能大大提高人類對物理環境的遠端監視和控制能力,在國防軍事、環境監測、智能交通、醫療保健、物流管理、農牧業生產等方面有著廣泛的應用[2]。
無線傳感器網絡往往需要大規模地部署于野外環境,其節點的計算資源和存儲資源都十分有限,與傳統計算機網絡相比較,無線傳感器網絡在網絡設備、終端節點、工作環境等方面與傳統網絡存在顯著差異,傳統的網絡管理無法完全應用于無線傳感器網絡。網絡管理技術是實現無線傳感器網絡可靠、安全、有效運行的保障,而時間同步是無線傳感器網絡管理的關鍵技術之一[3]。
基于無線傳感器網絡的應用,如目標定位和追蹤、協同數據處理、能量管理等都需要時間同步的保障。如在目標定位和追蹤應用中,除了要檢測目標的位置、速度、前進方向等信息外,還必須有采集信息的時戳,才能正確繪制出目標的運動軌跡。由于傳感節點的能量有限,為了節約能耗以延長網絡生存周期,傳感節點大部分時間要處于休眠狀態,在準備工作時需及時喚醒,這也要求各節點要有準確的時間同步。此外,數據融合、通信信道復用等也都需要時間同步的保障。
目前,學術界和業界對無線傳感器網絡的時間同步技術進行了一定的研究,本文總結了無線傳感器網絡時間同步技術的研究現狀,對三種不同時間同步機制的經典算法進行分析和比較,討論了同步技術下一步研究的方向。
1 時鐘描述及時鐘偏移
在無線傳感器網絡中,各傳感節點分布于一定的物理區域內,因節點內部時鐘晶振的頻率偏差、各節點所處的工作環境差異、電磁干擾等原因,使得各節點時間出現偏差,所以節點間需要周期性進行本地時鐘信息的交互,以保證各節點的時間一致性。只有整個網絡內各節點時間達到同步,無線傳感器網絡的應用才有效果實現的強大理想保障。
1.1 時鐘描述
表示t0時刻節點i的硬件時間, 表示節點i的硬件時鐘因環境溫度和干擾等產生的偏差。這是節點間時間偏差的硬件因素。
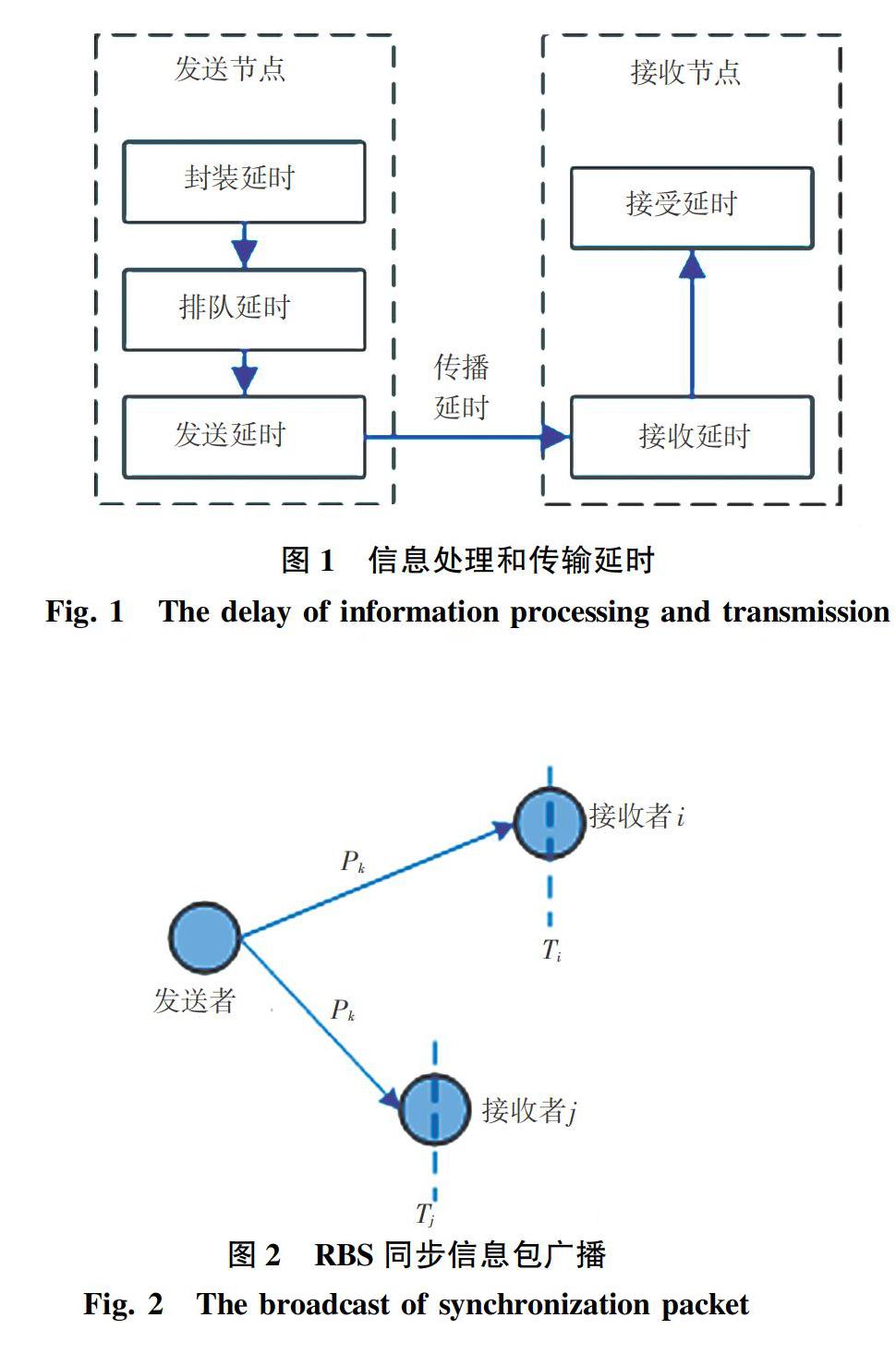
1.2 信息傳輸延遲
在發送端,需要對檢測到的信息進行處理,并按一定的協議標準封裝成數據包,其中存在延時主要取決于處理器的性能和負荷,可能高達幾百毫秒。排隊延時是指封裝后的數據包從進入傳輸通道直至開始發送的時間,這一過程主要取決于網絡負載情況,可能從幾毫秒到幾秒。發送延時是發送節點將信息全面發出需要的時間。傳播延時是數據包從發送節點到接收節點花費的時間,主要取決于兩者的通信方式和距離。接收延時是接收節點全部接收到數據包的時間,接受延時是對收到的數據包進行處理,再傳遞給上層應用程序的時間。
延遲的產生也會導致節點的同步時間偏差,需要對信息傳遞過程的延時進行分析補償,以消除同步信息傳輸過程的不確定性,提高系統的同步精度。
2 同步技術研究現狀
自從2002年J.Elson和K.Romer在學術會議HotNets上首次提出時間同步這一研究課程后,到目前為止,無線傳感器網絡的時間同步技術取得了一定進展,開發出了多種時間同步算法。這些算法可以分為基于接收者—接收者的時間同步算法、基于成對同步的雙向時間同步算法、基于發送者—接收者的單向時間同步算法等3類。RBS[5]、TPSN[6]、FTSP[7]分別是這3類同步機制的典型代表算法,其他代表性的同步算法還有DMTS[8]、LTS[9]、TSync[10]、GCS[11]等。在此,則針對RBS、TPSN和FTSP這3類典型算法給出性能概述與分析。
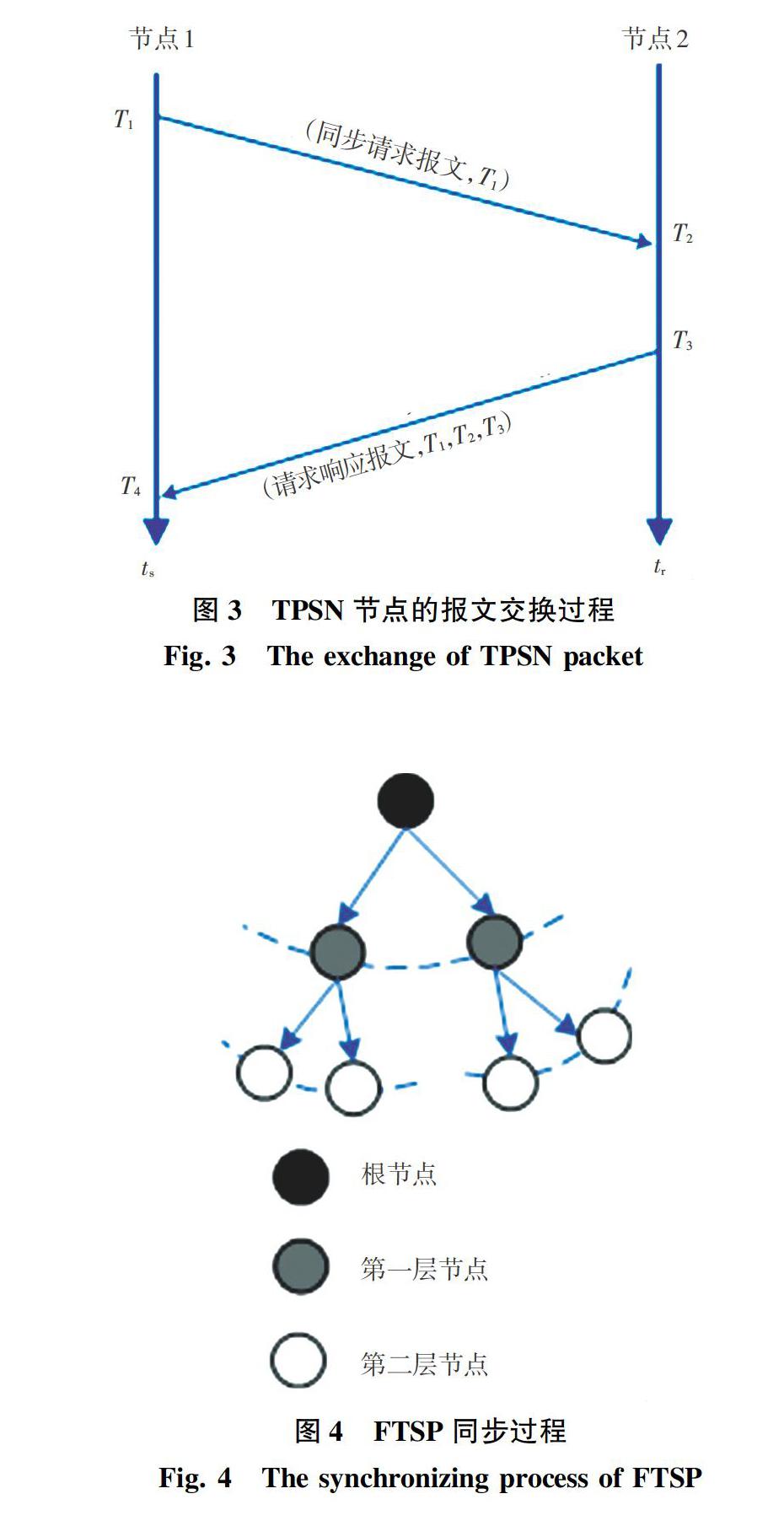
首先,RBS算法是無線傳感器時間同步技術領域的開創性成果。改算法通過指定的“時標”節點周期廣播時間信息分組,位于廣播域內的節點用各自的時鐘記錄接收到該分組的時間,隨即接收節點再兩兩互換消息以確定節點之間的時鐘偏移量,最終達到各節點的時鐘同步。在Mote試驗平臺上,RBS可以達到29微秒的同步精度。但RBS同步誤差與跳數的平方根成正比,并且僅能夠實現在廣播域內節點的局部時間同步,卻難以應用于密集多跳的網絡中。
其次,TPSN算法將整個網絡按層次進行劃分,指定根節點初始化分層消息后逐層擴散,發送者與接收者依次成對同步來實現整個網絡內的時間同步。TPSN擴展性好,結果的同步精度也優于RBS,但其根節點的失效將嚴重影響同步過程。
第三,FTSP算法形成一個Ad-hoc網絡結構來將全局時間從根節點轉換到所有節點,對鏈路故障、動態拓撲改變有較強的魯棒性,可以達到很高的同步精度,且算法的復雜度和功耗低,在實際需要中也已得到廣泛應用。
目前對于單跳網絡的同步研究已趨于成熟,但由于同步誤差的累積,導致單跳網絡的同步技術難以擴展到多跳網絡,使得多跳網絡的同步技術研究較為薄弱。若再考慮節點的移動性,則會極大增加同步技術的研究難度。因此,無線傳感器網絡的時間同步技術還有很大的研究空間。
3 時間同步經典算法
3.1 基于接收者—接收者機制的同步算法
各節點可通過式(2)得到相對其他所有節點時鐘偏移量的平均值,經多輪同步獲得接收節點之間的時間偏差值,并據此調節本地時鐘實現時間同步。RBS算法允許節點構建本地的時間尺度,并且通過同步信息包的多輪發送,極具現實優勢地消除傳輸過程中的時間不確定性;另一方面,其缺點卻在于當網絡節點數量增多時,將會使得同步收斂時間大大延長。
節點可以根據計算結果調到自身時間,按層次結構分層逐級執行同步,如此操作直至全網同步完成為止。TPSN算法容易擴展,同步計算量也較小,但該算法還不能應用于快速移動節點,而且也不支持多跳網絡。
FTSP算法對鏈路故障、動態拓撲改變具有較強的魯棒性,可以達到很高的同步精度,且算法的復雜度和功耗低,在實際的研究發展中得到廣泛應用。
4 結束語
本文介紹了節點時鐘的模型,分析了無線傳感器網絡中時鐘偏差的原因,對目前時鐘同步技術的發展現狀進行總結,分別介紹了基于接收者-接收者機制、基于發送者-接收者機制、基于發送者-接收者機制等3種同步類型中的典型算法。
在無線傳感器網絡中,時間同步不僅要關注同步精度,還要考慮算法復雜度、同步能耗、可擴展性、網絡尺寸、魯棒性等性能參數。目前對于單跳網絡的同步研究已趨于成熟,能夠滿足大多數應用場合的現實需求,在多跳網絡中則要進一步考慮同步誤差累計、節點移動性的影響等因素。
[1] I.F.Akyidiz, M.C.Vuran. Wireless sensor networks[M]. Wiley, New York:USA,2003.
[2] 孫利民. 無線傳感器網絡[M]. 北京:清華大學出版社,2005.
[3] 林曉鵬. 無線傳感器網絡及關鍵技術綜述[J]. 智能計算機與應用,2015(1), 81-83.
[4] 王營冠,王智. 無線傳感器網絡[M]. 北京:電子工業出版社,2012:182-193
[5] ELSON J, RIROD L, ESTRIN D. Fine-grained network time synchronization using reference broadcasts[C]//Proceeding of the 5th Symposium on Operating system Design and Implementation(OSDI 2002), Boston, Massachusetts, USA:USENIX,December, 2002:147-163.
[6] GANERIWAL S, KUMAR R, SRIVASTAVA M B. Timing-sync protocol for sensor network[C]//First ACM Conference on Embedded Networked Sensor System(SenSys), New York, NY, USA:ACM, 2004, 233(3):138-149.
[7] MAROTI M, KUSY B, SIMON G, et al. The flooding time synchronization protocol[C]//2nd ACM Conference on Embedded Networked Sensor System(SenSys04). Baltimore:ACM, November 2004:39-49.
[8]Su Ping. Delay Measurement Time Synchronization for Wireless Sensor Networks[R]. Santa Clara, USA:Intel Research Berkeley Lab, IRB-TR-03-013, 2003.
[9] GREUNEN J V, RABAEY J. Lightweight time synchronization for sensor networks[C]// Proceedings of WSNA03. San Diego, California,USA:ACM, 2003:11-19.
[10] DAI Hui, HAN R. TSync: A lightweight bidirectional time synchronization service for wireless sensor network[J]. ACM SIGMOBILE Mobile Computing and Communications Reviews,2004,8(1):125-139.
[11] LI Qun, RUS D. Global clock synchronization in sensor network[C]//Proceedings of INFOCOM 2004. Hongkong,China:IEEE,March,2004:214-226.
