基于STM32的四軸飛行器遙控與智能防撞設計
2016-05-03 02:46:06李潤寧繆月巫俊靈孫光闊陶心怡
智能計算機與應用 2016年2期
李潤寧 繆月 巫俊靈 孫光闊 陶心怡
摘要:四軸飛行器具有結構簡單、能耗低、體積小等優點,在多處領域被使用。在復雜環境中飛行,遇到障礙物時,通過人為操縱飛行器不斷改變飛行狀態避開障礙物難度較大,該設計利用6路超聲波檢測模塊計算障礙物位置,實現自動避障。具有靈活性強、穩定性高等特點,大大降低了飛機墜機的風險。
關鍵詞:四軸飛行器;智能避障;超聲波避障
中圖分類號:TP242.6 文獻標識碼:A文章編號:2095-2163(2016)02-
Design of remote control and intelligent collision avoidance of four axis aircraft based on STM32
LI Running,MIAO Yueqin,WU Junling,SUN Guangkuo,TAO Xinyi
(College of Electrical Engineering,Shanghai University of Engineering Science,Shanghai 201620,China)
Abstract:Four axis aircraft has the advantages of simple structure, low energy consumption, small volume, which is used in many fields. Flying in the complex environment, while encountering all the obstacles,it is difficult to changeaircraft flight status by manual manipulation aircraft. This paperproposesthe design of no.6 ultrasonic detection module, in which the position of obstacles is determined, and automatic obstacle avoidance is realized. The research has such advantages as strong flexibility and high stability, therefore greatly reduces the risk of the plane crash.
Key words:Quad rotor;intelligent obstacle avoidance;ultrasonic obstacle avoidance
0引言
四軸飛行器因其結構緊湊、飛行方式獨特、切具垂直起降式特點,使其在軍事和民用多個領域都已延伸拓展了廣闊應用前景,同時非常適合在狹小空間內執行任務。而在復雜環境中飛行,并遇到障礙物時,試圖通過人為操縱來不斷改變飛行器飛行狀態、從而避開障礙物的執行實施難度較大,更多情況下則會由于操作不當導致飛行器損毀,由此可知人為操作避障可靠性差、可行性低。基于此,本文提出了一種智能避障設計,旨在顯著降低飛行器由于人為操作失誤而墜毀的風險。
該設計利用姿態獲取技術、PID控制算法、2.4G無線通訊技術和智能避障算法,實現對四軸飛行器的精準控制。系統的整體設計包括飛控部分、遙控部分和智能避障部分。其中,飛控部分采用STM32F407作為主控芯片,而且引入控制板和機架一體設計增強系統穩定性。遙控部分采用搖桿操作輸入使操作體驗可達現實極佳。控制板和遙控器之間采用2.4G無線通訊模塊,保證數據穩定傳輸。智能避障系統通過6路超聲波模塊數據,精準計算障礙物位置,實現智能避障。
1四旋翼飛行器的結構原理
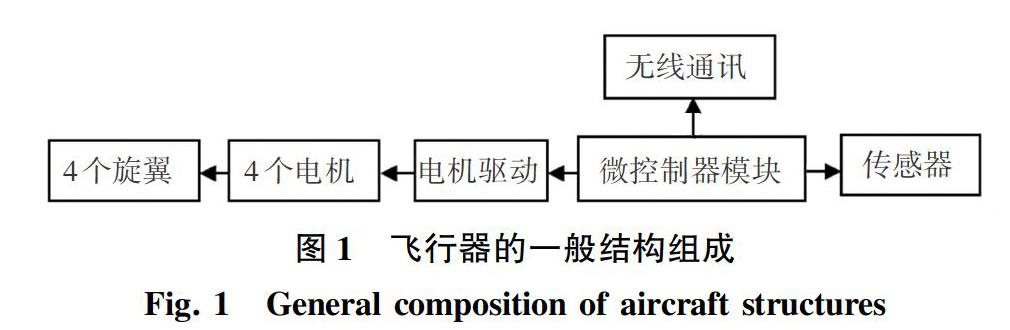
四旋翼飛行器的結構一般可分為4個模塊:電機模塊,微控制器模塊,傳感器模塊以及無線通訊模塊,如圖1所示。具體地,電機模塊由4個旋翼、電機和電機驅動器組成;微控制器模塊用來實現與其他模塊的數據傳輸并對其進行實時控制;傳感器模塊由檢測飛行器各種姿態和指定飛行方向的傳感器組成,如加速度傳感器,陀螺儀傳感器等;無線通訊模塊則由無線發射、無線接收和遙控器模塊組成。
Fig.1 General composition of aircraft structures
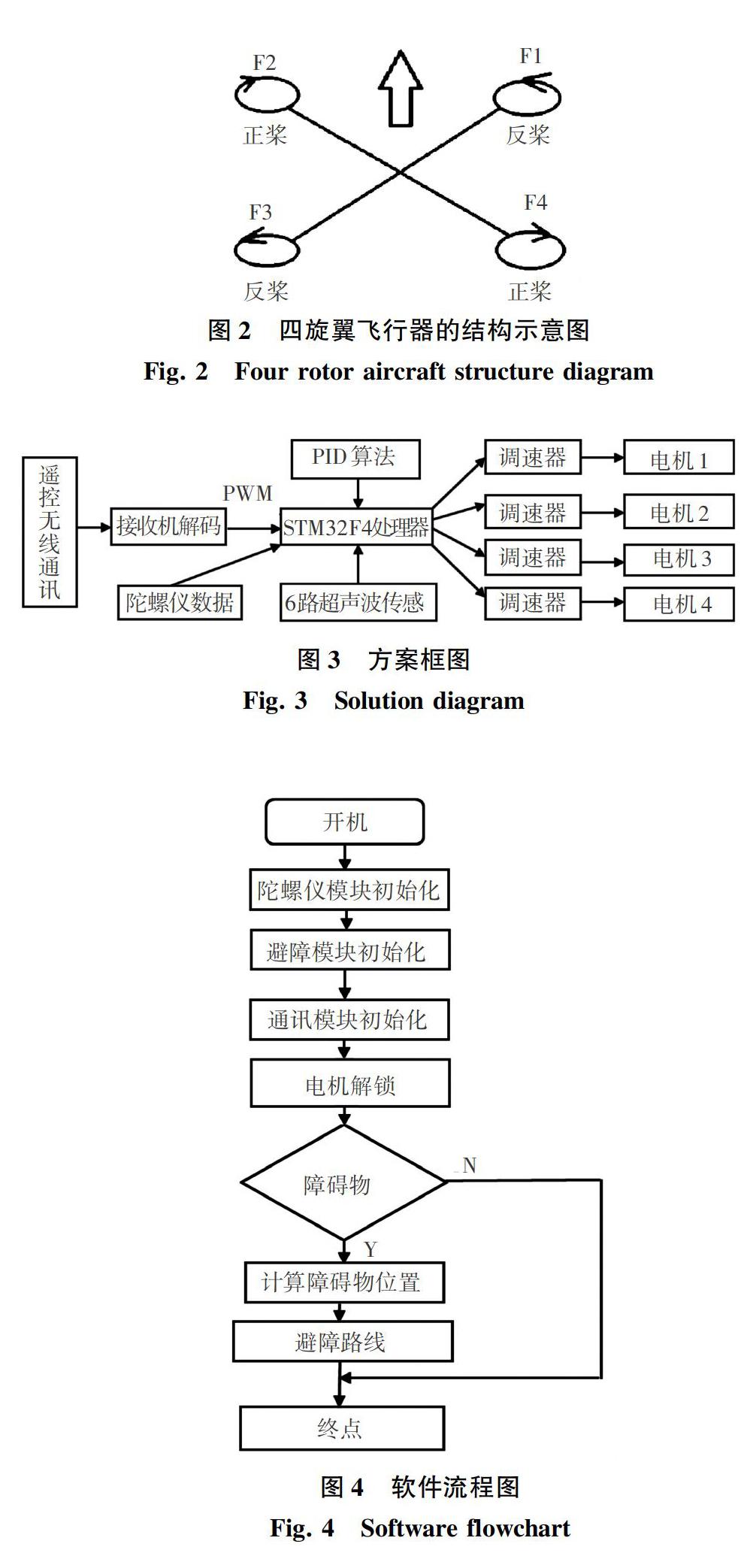
四旋翼飛行器的工作方式分為“+”模式和“x”模式兩種。“+”模式飛行器的4個旋翼對稱分布在飛行控制板的中軸線上;“x”模式飛行器的4個旋翼對稱分布在控制板的對角線上。相對于“+”模式,“x”模式的飛行穩定性更高,在狹窄的空間飛行更顯其客觀優勢,所以大部分飛機均是采用了“x”模式。飛行器通過調節4個電機的轉速,借此改變旋翼轉速而實現升力的變化,從而控制飛行器的姿態和位置。四旋翼飛行器的結構如圖2所示,可以實現6種基本運動方式。
傳統的四軸飛行器沒有避障傳感器模塊,也沒有智能避障算法,所以很容易由于人工操作失誤所致,與障礙物發生碰撞,導致飛行器墜落。本研究在傳統四軸飛行器的基礎之上提出了設計改進,增加避障傳感器,同時結合智能避障算法,由此實現了飛機的自動避障,大大降低了墜機的風險。
2總體方案
3硬件設計
四軸飛行器的主要目的是實現遙控與自動避障。處理器選用了STM32F407,該芯片采用ARM Cortex-M4內核,主頻高達100MHz,具有14個定時器,144個接口,芯片擁有充分用于本研究設計的執行實施,而且即便對于今后的深度開發也留有足夠的拓展空間。不僅如此,考慮到日后的硬件升級和其他功能的發展完善,選擇了具有較大負載能力的50CM軸距的碳纖維機架,碳纖維機架具有強度高、質量輕的特點,完全滿足本文研究的現實需求。進一步地,綜合速度和負載的雙重考慮,螺旋槳采用了11寸APC正反漿,為了針對MCU信號實現快速響應,電機驅動選擇具有瞬態控制并且表現穩定的30A無刷電子調速器,同時配備了增速更快、轉速精準的x2212 kv980無刷電機。此外,電池選取的是航模中常用的3S 11.1V 2200mAh動力鋰電池;超聲波模塊則選用HY-SRF05超聲波傳感器,該傳感器性能穩定,盲區小,高度貼切、符合本文設計。
4軟件設計
軟件設計思想是,開機初始化通訊模塊、傳感器模塊、避障模塊等。隨后等待電機解鎖信息的傳入,計算障礙物位置,設計避障路線,抵達終點。程序設計流程如圖4所示。
飛控系統采用6路超聲波模塊,每個模塊檢測1個方向,6個方向分別為前、后、左、右、上、下。飛控系統需要不停檢測6路模塊,當遙控器下達向某一方向前進命令時候,若該方向上沒有障礙物,則飛機正常行駛,直至到達目的地前若都沒有遇到障礙物,則飛機將一直平穩行駛。當飛機前進方向上發現遇有障礙物時候,則利用6路傳感器返回探測值,由此計算前方障礙物形狀,并且自動規劃設計避障路線,再執行相關指令智能避過障礙物,繞過障礙物之后,將自行回到原來的飛行運動直線上。整個飛行過程則如同前述處理所示,判斷選擇循環發生,直至飛行器順利抵達目的地。
5結束語
本文提出了一個簡易四軸飛行器遙控與智能防撞設計的研究實現,整個方案分為遙控控制板、飛行控制板、智能防撞系統設計3個部分。通過2.4G無線模塊進行通訊;飛控系統采用姿態獲取算法,根據反饋控制算法進行電機驅動從而實現飛行控制;飛控板采用一體化設計使得系統簡單、緊湊。6路超聲波模塊同時檢測,使得障礙物位置檢測精確,自動避障系統設計,避免了普通飛機容易失事的弊端。本文研究最終實現了飛行器的基本遙控與智能防撞的預期功能目的。實踐證明,該四軸飛行器飛行穩定,障礙物位置檢測精確,避障系統性能穩定,且飛行靈活,因而取得了較好的現實應用效果。
參考文獻
[1]常國權,戴國強. 基于STM32的四軸飛行器飛控系統設計[J]. 單片機與嵌入式系統應用,2015,15(2):29-32.
[2]劉偉超,徐剛,田浩元.基于STM32的四軸航拍飛行器[J].電子技術與軟件工程,2015(17):106.
[3]周建陽,陳家樂,薛斌,等. 基于STM32四軸飛行器的設計[J]. 欽州學院學報,2015,30(2): 30-33.
[4]陳海生,鐘江濤,林俊凱.基于四軸飛行器的 PID 姿態控制系統[J].消費電子, 2014(22):190.
