基于T-S模糊控制器的電動汽車V2G智能充電站控制策略
2016-05-06 10:44:57劉東奇王耀南申永鵬
電工技術學報 2016年2期
劉東奇 王耀南 申永鵬
(湖南大學電氣與信息工程學院 長沙 410082)
?
基于T-S模糊控制器的電動汽車V2G智能充電站控制策略
劉東奇 王耀南 申永鵬
(湖南大學電氣與信息工程學院 長沙 410082)
摘要提出一種基于T-S模糊控制器、用于實現電動汽車接入電網(V2G)技術的電動汽車智能充電站控制策略,闡述了該智能充電站的結構和原理,研究電網在不同負荷狀況以及電動汽車在不同荷電狀態下,進入智能充電站的每一輛電動汽車和電網之間的功率流向關系。仿真結果表明,所提出的控制策略可以有效地根據電網負荷情況和每輛電動汽車的荷電狀態實現功率的雙向智能分配,從而保障電網的穩定性、提高電網效率。
關鍵詞:電動汽車接入電網 電動汽車 電網接入 智能充電站 T-S模糊控制器
國家高技術發展計劃(863計劃)(2012AA111004)和國家自然科學基金(61175075、61203019)資助項目。
0 引言
近年來,全球石油資源遞減、環境惡化以及溫室效應的形勢日益嚴峻,對人類社會的可持續發展提出重大的挑戰。節能減排技術日益受到世界各國的重視,交通能源轉型也勢在必行。電動汽車(Electric Vehicle,EV)作為一種能量利用率高、無污染、低噪聲和零排放的綠色交通工具,被認為是未來汽車工業發展的主要方向[1]。
目前,可再生能源發電系統正在被大量地接入電網[2]。由于可再生能源發電的不連續性,迫切需要其他能量貯存系統輔助電網接納波動性可再生能源,從而保障電網頻率和電壓的穩定。電動汽車具有接納波動性可再生能源潛力的能量存儲設備,當電動汽車的數量足夠大時,其巨大的電池容量足以平抑分布式電源接入對電網產生的擾動[3]。
大量的電動汽車接入電網將帶來新一輪的負荷快速增長,對于用電負荷峰谷差日益加大的電力系統而言,增加了巨大的供電壓力。在電動汽車無序接入電網的情況下,大量電動汽車的充電要求必然將加劇現有的電壓跌落、支路容量不匹配等問題[4]。因此,如何控制能量在電動汽車與電網之間有序流動,使其能夠在電網負荷低時集中存儲電網富余的發電量,在電網負荷高時由電動汽車向電網饋電,同時又能兼顧汽車自身的能量存儲狀態,滿足車主日常的行駛需求,是具有非常重要學術意義和現實價值的研究課題。
文獻[5]詳細闡述了電動汽車接入電網(Vehicle to Grid,V2G)技術的發展對電網產生的影響。文獻[6]提出了一種適用于電動汽車充放電的計價策略。在電動汽車充放電管理策略上,文獻[7]提出了一種基于凸松弛法的電動汽車充放電優化調度策略,但這種方法計算量大,在大量電動汽車同時接入的情況下實時性較差。文獻[8,9]提出了基于Mamdani型模糊控制器的充電站控制策略。然而,由于Mamdani型模糊系統輸出的結果不連續,因此不利于精確的數學分析,存在輸出模糊誤差。Takagi-Sugeno(T-S)型模糊系統則不然,T-S模糊規則中,“if”部分是模糊的,“then”部分是確定的,其輸出為各輸入變量的線性函數。T-S型模糊控制器提供了一個精確的系統方程,為系統的分析和設計帶來了方便,并且無需解模糊,不存在由于輸出模糊空間劃分有限帶來的模糊誤差,系統控制準確度高[10]。本文利用T-S型模糊控制器的特點,提出了一種新型電動汽車V2G智能充電站控制策略,從整體角度對該智能充電站進行設計并完成仿真分析。仿真結果顯示,該方法可以有效地控制功率在每一輛電動汽車和電網之間的雙向流動,在保障電網穩定、提高電網效率的同時,可兼顧車主對電池電量的要求,提高充電站的實用性。
1 V2G智能充電站結構及工作原理
1.1 配電網模型
本文參考的配電網結構如圖1所示,由一個35kV變電站和若干10kV配電主干線路組成。其中10kV配電主干線路通過容量為630kW的配電變壓器連接到380V的電網支路。假設該配電網低谷負荷是高峰負荷的60%,輸電線路的電阻和電抗分別為0.002 7(pu)和0.002 3(pu)。本文討論的充電站連接在圖中一個380V的電網支路節點5.2。
1.2 V2G智能充電站總體結構
本文設計的電動汽車V2G智能充電站主要由T-S模糊控制器、電量計算、功率分配以及電能變換四個單元組成,其總體結構如圖2所示。
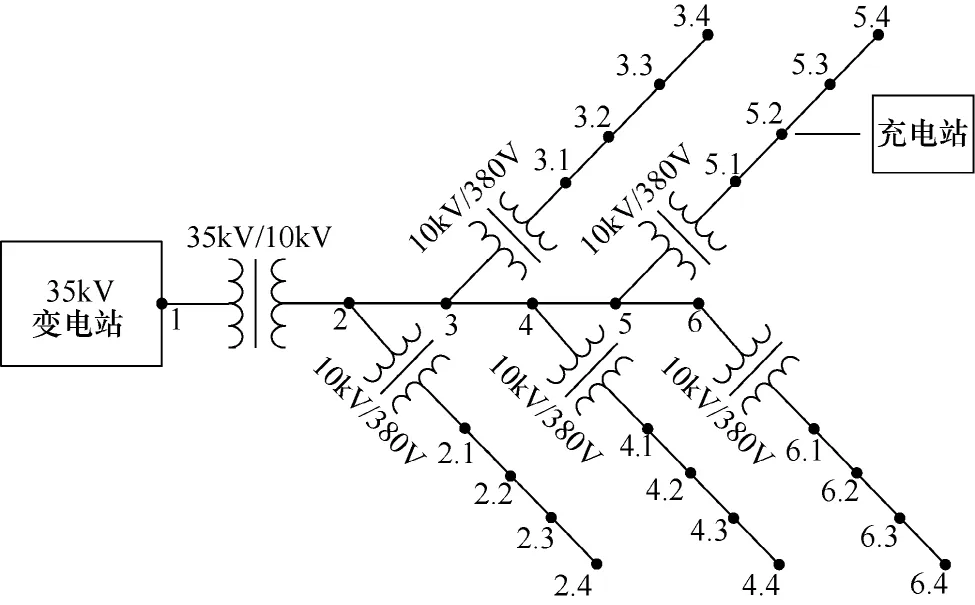
圖1 配電網結構Fig.1 Structure of 35kV distribution system

圖2 電動汽車V2G智能充電站結構Fig.2 V2G charging station architecture
由圖2可知,該電動汽車V2G智能充電站的運行流程為:首先,電量計算單元根據接入到充電樁的電動汽車的電池荷電狀態SOCi計算充電站內總的可以用于支持V2G和車輛網絡(Grid to Vehicle,G2V)兩種模式的電能EV2G和EG2V;然后,T-S模糊控制器根據當前電網節點電壓Vnode和電量計算單元得出的結果,計算電網需要傳輸給充電站的功率PG2V和充電站回饋給電網的功率PV2G;之后,功率分配單元根據T-S模糊控制器的計算結果,將電功率具體分配到每一輛電動汽車接入的充電樁上;最后,通過控制電能變換單元的三相整流/逆變橋的觸發延遲角,實現電能在電動汽車和電網之間的雙向傳遞。
1.3 電量計算單元

電動汽車V2G智能充電站的電量計算單元根據每輛車的荷電狀態,計算每輛車需要從電網獲取的電能Eai和每輛車可以用于支持電網的電能Ebi。即式中,Vti為電動汽車電池組的終端電壓;Qi為電動汽車電池組的額定容量;SOCi為電動汽車當前電池電量;分別為用戶設定的電池電量上限與下限。電動汽車充電過程中,其電池電量不得高于其上限而放電過程中其電量不得低于下限
根據式(1)和式(2),電量計算單元可以統計充電站內總的可以用于G2V和V2G兩種模式的電能EG2V和EV2G
1.4 T-S模糊控制器
如上所述,為了求取電網流向充電站的功率PG2V和充電站回饋給電網的功率PV2G,本文設計了兩個獨立的T-S模糊控制器分別進行并行計算,然后將計算結果送入功率分配單元等待下一步操作。
本文采用高斯型隸屬度函數

式中,vij和σij分別為各規則空間的中心和方差。

圖3 電網節點電壓隸屬度函數Fig.3 Fuzzy membership function of
為充電站需求充電的電能EG2V的模糊語言變量,其論域定義在[0,1]區間,由EG2V的實際論域[0,N0]變換而來,其中N0是一個與充電站充電規模相關的參數。當一輛電動汽車接入到充電樁上時,電動汽車上的電池管理單元將其電池組額定容量Qi、電池組終端電壓Vti以及剩余電量SOCi等信息發送給充電樁的信息處理模塊,隨即匯總到充電站的電量采集單元。由此可以得到一輛電動汽車最大可存儲電能為充電站實時在網電動汽車可存儲的最大電能為設取值為Emax,即的實際論域為的論域變換,將其變換到模糊語言變量的論域[0,1]。該設計的優點是:通過比例因子的自調整,使輸入變量模糊量化自動適應充電站在網電動汽車實時變化的情況。即現時刻輸入變量的模糊量化是相對現時刻充電站在網電動汽車可存儲的最大電能而言的,保證了模糊量化的相對標準不變,提高了系統的控制性能。
圖4 充電站充電電能隸屬度函數Fig.4 Fuzzy membership function of
圖5 充電站支持電網電能隸屬度函數Fig.5 Fuzzy membership function of
充電模糊控制器采用的T-S模糊控制規則為


式中,k0為常數,,Tk表示充電站安全充電時間。不同型號電動汽車的電池組容量可能不同,但是同一類型充電站(比如有專為小車服務的停車場式充電站,也有包含大客車和中型車的混合公用充電站)服務的電動汽車其最大電池組容量是可知的。將充電站可存儲的電能記為EM,設Pmax為充電樁允許的最大充電功率,則安全充電時間,即Tk為某一類充電站可接納的電動汽車中,以最大容量電池組所允許的最大充電功率充電,將其充滿所需的時間。
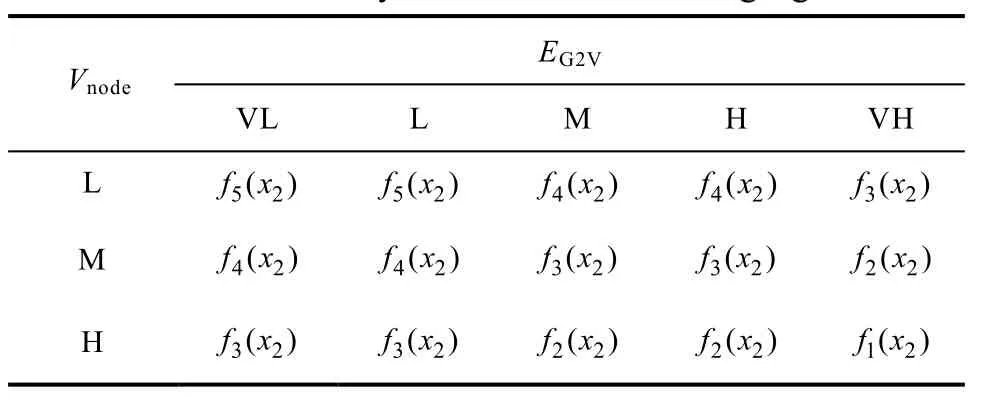
表1 充電模糊控制器模糊控制規則Tab.1 Fuzzy control rules of charging
由表1可得充電模糊控制器的輸出為

式中
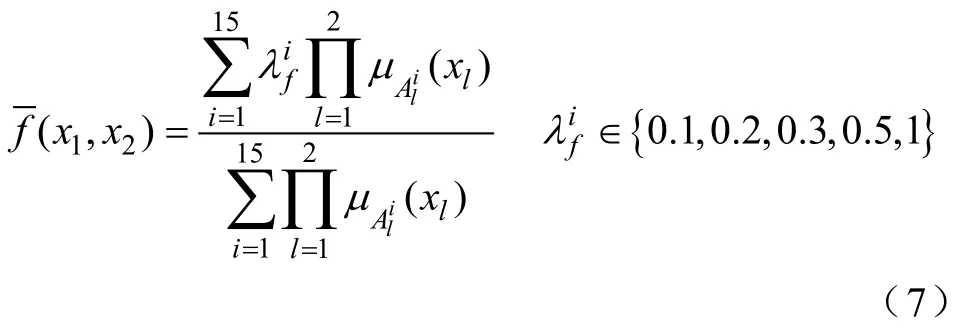
在每個采樣時刻獲得當前的電網節點電壓狀態x1和電量狀態x2后,由式(6)和式(7)可以計算實時的充電功率。由式(6)可知,充電功率ua是電網節點電壓狀態x1和需充電電量狀態x2的非線性連續函數,ua隨電網節點電壓狀態和需充電電量狀態的變化而變化。這表明,充電模糊控制器充電功率連續變化,工作平穩,具有很強的自適應能力。該模糊控制器另一個突出特點是:如果需求電量為零(即充滿時),充電功率也為零,可以有效避免過充現象發生,這是傳統的模糊控制器所不具備的(傳統的模糊控制器存在輸出模糊誤差)。
放電模糊控制器采用如下T-S模糊控制規則



表2 放電模糊控制器模糊控制規則Tab.2 Fuzzy control rules of discharging
由表2可得放電模糊控制器的輸出為
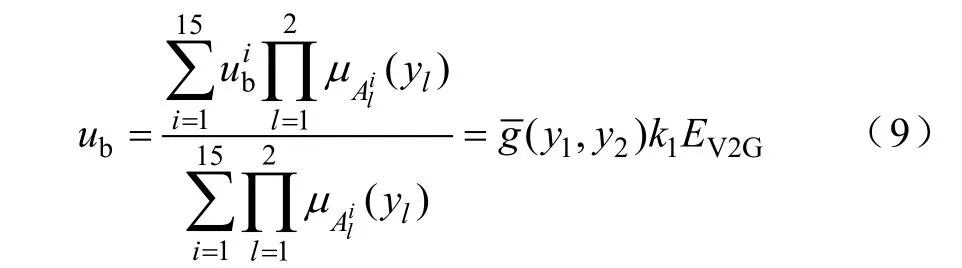
式中
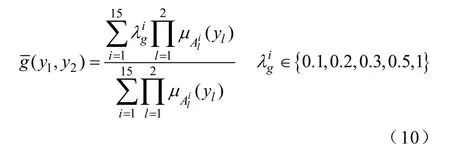
顯然,放電模糊控制器與充電模糊控制器一樣,放電功率連續變化,工作平穩,具有很強的自適應能力。放電模糊控制器另一個突出特點是:當用戶不放電,即設置放電電量為零時,由式(9)可知,放電功率也為零,有效避免了過放電現象的發生。
1.5 功率分配單元
功率分配單元根據式(11)將T-S模糊控制器的輸出結果PG2V(式(6)得出的ua)和PV2G(式(9)得出的ub)進行再分配,將功率具體分配連接到V2G智能充電站的每一輛電動汽車。
式中,iP為功率分配單元分配給每一輛電動汽車的充放電功率。由于Eai是由用戶設定計算得出的汽車需要充電的電能,Ebi是由用戶設定計算得出的汽車可以放電的電能,而EG2V和EV2G分別是整個充電站內所有電動汽車整合起來總的需要充電的電能和允許放電的電能。因此,每輛車的充放電功率將由其自身的充放電需求、該需求在整體需求中所占的比重以及模糊控制器根據當前電網狀態和總體能量需求輸出的總充放電功率來決定。當iP為正時,功率從電動汽車流向電網;否則功率從電網流向電動汽車。
1.6 電能變換單元
電動汽車V2G智能充電站的電能變換單元如圖6所示。其主電路拓撲由一個雙向半橋DC-DC結構和一個以IGBT為開關管的三相橋式逆變器組成。圖6左邊交流側通過一個LC濾波器連接到電網,右邊直流側與電動汽車相連。
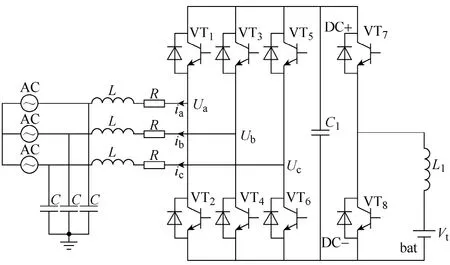
圖6 電動汽車V2G充電樁拓撲結構Fig.6 The topology of V2G charging pile
逆變器在dq同步旋轉坐標系下的數學模型為

式中,ed、eq為變換后的電網電壓;ud、uq為逆變器側電壓;id、iq為并網電流;R、L分別為三相線路電阻和電感;ω 為三相電壓、電流的頻率,逆變器并網運行時由電網頻率決定。
由于d、q軸變量相互耦合,采用前饋解耦控制策略,當電流調節器采用PI調節器時,將系統電流內環設計為

本文選取的同步坐標系中,對稱三相電網電壓波形經Park變換后Vq為0,則逆變器的輸出功率在旋轉坐標系下可以表示為

將式(11)代入式(14),令逆變器工作在單位功率因數狀態,則電流環d、q軸參考值為
由式(12)~式(15)可得逆變器控制框圖如圖7所示。

圖7 V2G逆變器控制框圖Fig.7 Control strategy of the V2G inverter
2 仿真
1)電網高峰負荷
電網負荷高峰時,電網節點電壓一般較低,為0.95~0.97(pu)左右。在電網高峰負荷時將表3所列荷電狀態的電動汽車組接入電網,則電網側測得的電動汽車組充放電功率如圖8所示。

表3 電動汽車測試組一Tab.3 Specification of EV test group 1

圖8 電網高峰負荷時測試組一充放電功率Fig.8 The charge and discharge power of test group 1 at peak load
2)電網低谷負荷
電網負荷低谷主要在夜間,此時電網節點電壓一般較高,在1.05~1.1(pu)區間內。在電網負荷低谷時將表4所列的電動汽車組接入電網,則電網側測得的電動汽車組充放電功率如圖9所示。

表4 電動汽車測試組二Tab.4 Specification of EV test group 2
3)其他時段
除電網負荷高峰和電網負荷低谷的時間段,假設電網節點電壓在0.97~1.05(pu)之間。在電網高峰負荷時將表5所列電動汽車組接入電網,則電網側測得的電動汽車組的充放電功率如圖10所示。
從圖8可以看出,當電網負荷高(Vnode=0.96(pu)時,充電站內表3所列測試組一中剩余電量高于用戶設定底線的電動汽車(如G1~G4)開始向電網放電。每輛電動汽車放電的功率由其自身的剩余電量水平決定。而充電站內低于用戶設定底線的電動汽車(如G5)則仍然從電網取電,直到該電動汽車的剩余電量達到用戶設定的電池電量最低值。
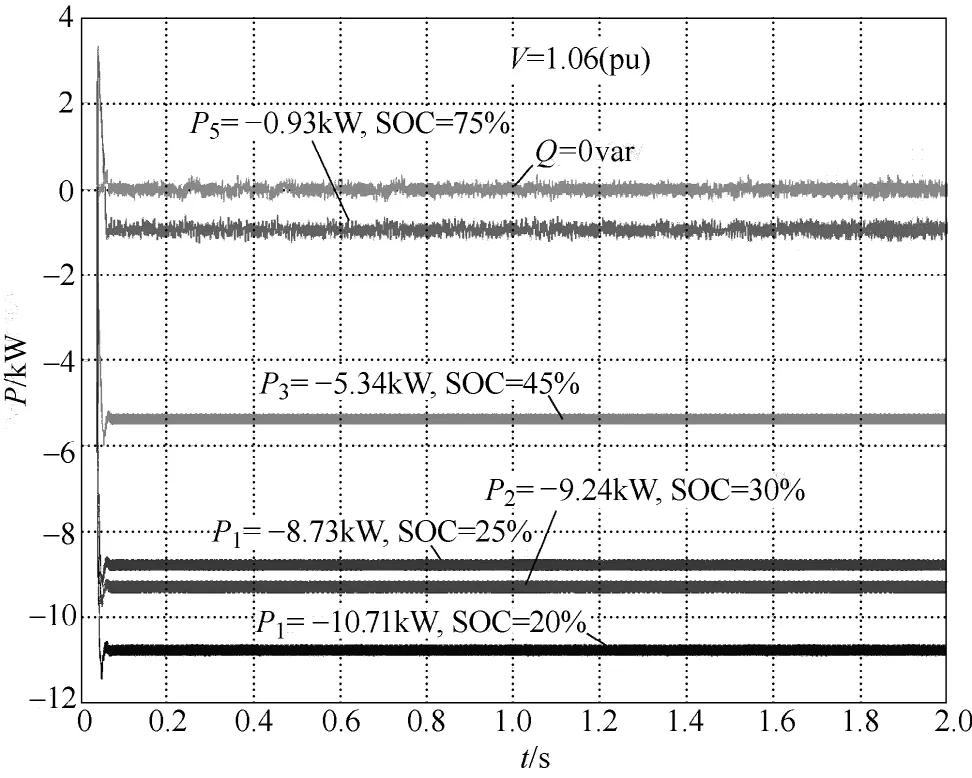
圖9 電網低谷負荷時測試組二充放電功率Fig.9 The charge and discharge power of test group 2 in the low power grid
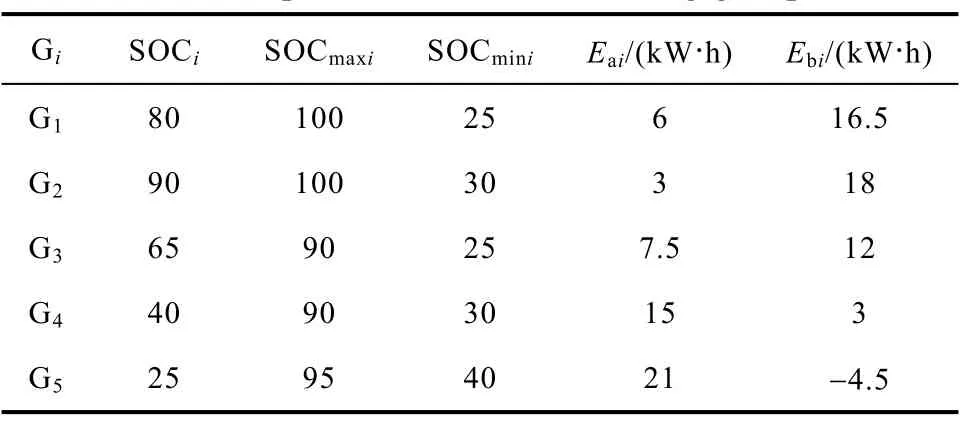
表5 電動汽車測試組三Tab.5 Specification of EV testing group 3
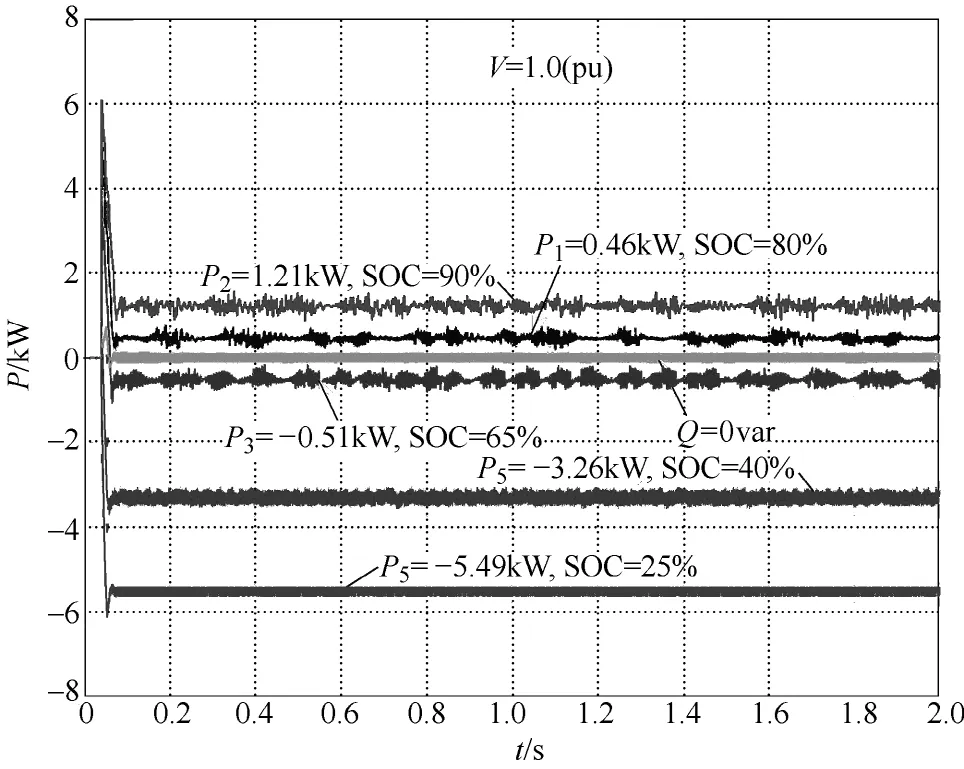
圖10 其他時段測試組三充放電功率Fig.10 The charge and discharge power of test group 3 at other period of time
電網負荷低(Vnode=1.06(pu))時,充電站對表4所列測試組二的功率分配如圖9所示。此時充電站內剩余電量低于用戶設定最大值的電動汽車從電網取電,充電的功率由其自身的剩余電量水平決定。如果電動汽車當前電量與用戶設定的最大值差距較大,則以較高的功率充電,否則將以較低的功率充電。
當電網處于非峰非谷期(Vnode=1.00(pu))時,充電站對表5所列測試組三的功率分配如圖10所示。此時當前電量較高的電動汽車以較小的功率進行放電(如G1~G3),而與用戶電量要求相差較大的電動汽車則以較大功率充電(如G4、G5)。可見測試組三的第2組和測試組一的第1組、測試組三的第5組和測試組一的第5組中電動汽車的荷電狀態與用戶設定是相同的,而其輸出相差很大,體現了模糊控制器對于電網在不同負荷狀態下對電動汽車充放電功率的調節能力。
采用上文提出的控制策略,本文進行了智能充電站充放電對電網負荷影響的仿真。仿真采用三種類型的電動汽車——公交車、商務車和小轎車,其容量及配置情況見表6。

表6 電動汽車類型及參數設置Tab.6 Types and parameters of EVs
一天內進入該智能充電站的電動汽車進出站時的電量儲存情況以及進出站時刻見表7。設則k0=1/3、k1=1/3,N0、N1根據不同時段在網的電動汽車自動調整,模糊控制規則表見表1和表2。表7中,Tn為電動汽車充電樁編號,A_n%表示剩余電量SOC為n%的公交車,B_n%表示剩余電量SOC為n%的商務車,C_n%表示剩余電量SOC為n%的小轎車。
圖11是根據表7所列電動汽車充電站車輛進出情況計算的EG2V和EV2G在12∶00~24∶00之間跟隨變化而變化的示意圖。由于充電站在15∶00、 18∶00和21∶00分別有電動汽車進出站,因此在這幾個時間點EG2V和EV2G發生了較大的跳變。可以看出,在電網高峰負荷時間段(18∶00~20∶00),EV2G持續下降,即充電站允許放電的電能減少,說明此時充電站內剩余電量高于SOC下限的電動汽車向電網放電;而在電網低谷負荷時間段(22∶00~24∶00),EG2V下降的同時EV2G上升,即充電站需要充電的電能減少,同時允許放電的電能增多,說明此時充電站內剩余電量低于SOC上限的電動汽車正以較大功率充電,從而提高了充電站總體存儲的電能。

表7 電動汽車充電站車輛進出情況統計Tab.7 Vehicle parking statistics of the proposed smart charging station

圖11 EG2V和EV2G隨Vnode變化的情況Fig.11 Changing of EG2Vand EV2Gwith Vnode
圖12是采用本文提出的控制策略設計的智能充電站對電網進行智能充、放電的電網負荷和電網原負荷的對比。可以看出,本文提出的電動汽車V2G智能控制策略通過調控電動汽車在電網高峰負荷時間段放電、在電網低谷負荷時間段充電,有效地調節了電網負荷的峰谷差,提高了電網的效率。
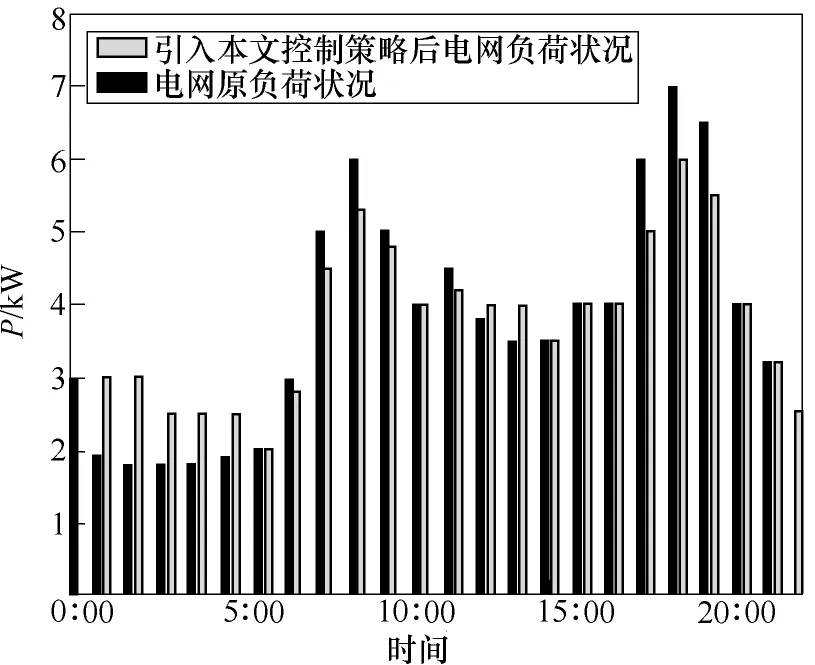
圖12 電動汽車充放電輔助電網調峰Fig.12 Regulating peak of power network by charging and discharging of EVs
3 結論
本文針對大量電動汽車接入電網對電力系統帶來的增大電力峰谷差、加劇電壓跌落等問題,提出一種可以自由調節電能在電動汽車和電網之間傳輸方向,從而輔助電網進行調峰等服務的新型電動汽車V2G智能充電站。本文根據T-S型模糊控制器的特點,從V2G智能充電站的總體結構出發,對其每一部分的控制策略進行詳細的分析與設計,通過監測電網電壓,智能地調節逆變器的給定功率,從而實現對每一輛電動汽車充放電功率的控制。仿真結果表明該方法可以有效地控制功率在每一輛電動汽車和電網之間的雙向流動,在保障電網穩定、提高電網效率的同時兼顧了車主對電池電量的要求,提高了充電站的實用性。
參考文獻
[1]Mehrhad E,Yimin G,Ali E.Modern electric,hybrid electric,and fuel cell vehicles—fundamentals,theory,and design[M].Boca Raton:CRC Press,2005.
[2]Turton H,Moura F.Vehicle-to-grid systems for sustainable development:an integrated energy analysis[J].Technological Forecasting and Social Change,2008,75(8):1091-1108.
[3]Wang J,liu C,Ton D,et al.Impact of plug-in hybrid electric vehicles on power systems with demand response and wind power[J].Energy Policy,2011,39(7):4016-4021.
[4]劉曉飛,張千帆,崔淑梅.電動汽車V2G技術綜述[J].電工技術學報,2012,27(2):121-127.Liu Xiaofei,Zhang Qianfan,Cui Shumei.Review of electric vehicle V2G Technology[J].Transactions of China Electrotechnical Society,2012,27(2):121-127.
[5]Yilmaz M,Krein P T.Review of the impact of vehicle-to-grid technologies on distribution systems and utility interfaces[J].IEEE Transactions on Power Electronics,2013,28(12):5673-5689.
[6]Jin Chenrui,Tang Jian,Ghosh P.Optimizing electric vehicle charging with energy storage in the electricity market[J].IEEE Transactions on Smart Grid,2013,4(1):311-320.
[7]Wen C K,Chen J C,Teng J H,et al.Decentralized plug-in electric vehicle charging selection algorithm in power systems[J].IEEE Transactions on Smart Grid,2012,3(4):1779-1789.
[8]Thirugnanam K,Joy T P E R,Singh M,et al.Modeling and control of contactless based smart charging station in V2G scenario[J].IEEE Transactions on Smart Grid,2014,5(1):337-348.
[9]Mukesh S,Praveen K,Indrani K.Implementation of vehicle to grid infrastructure using fuzzy logic controller[J].IEEE Transactions on Smart Grid,2012,3(1):565-577.
[10]Zhang X Z,Wang Y N.Fuzzy variable structure control based on a Takagi-Sugeno model for permanentmagnet synchronous motors[J].Journal of Systems and Control Engineering,2009,223(6):773-783.
[11]Mithat C K,Burak O,Leon M T.EV/PHEV bidirectional charger assessment for V2G reactive power operation[J].IEEE Transactions on Power Electronics,2013,28(12):5717-5727.
[12]Yutaka O,Haruhito T,Tatsuhito N,et al.Autonomous distributed V2G(Vehicle-to-Grid)satisfying scheduled charging[J].IEEE Transactions on Smart Grid,2012,3(1):559-564.
[13]Liu H,Ning H S,Zhang Y,et al.Battery status-aware authentication scheme for V2G networks in smart grid[J].IEEE Transactions on Smart Grid,2013,4(1):99-110.
[14]張謙,韓維健,俞集輝,等.電動汽車充電站仿真模型及其對電網諧波影響[J].電工技術學報,2012,27(2):159-164.Zhang Qian,Han Weijian,Yu Jihui,et al.Simulation model of electric vehicle charging station and the harmonic analysis on power grid[J].Transactions of China Electrotechnical Society,2012,27(2):159-164.
[15]王冕,田野,李鐵民,等.應用于儲能系統的雙向DC-DC變換器研究[J].電工技術學報,2013,28(8):66-71.Wang Mian,Tian Ye,Li Tiemin,et al.Study of bidirectional DC-DC converters applied to energy storage system[J].Transactions of China Electrotechnical Society,2013,28(8):66-71.
[16]Crosier R,Wang Shuo.DQ-frame modeling of an active power filter integrated with a grid-connected,multifunctional electric vehicle charging station[J].IEEE Transactions on Power Electronics,2013,28(12):5702-5716.
[17]Mei Su,Hui Wang,Yao Sun,el al.AC/DC matrix converter with an optimized modulation strategy for V2G applications[J].IEEE Transactions on Power Electronics,2013,28(12):5736-5745.
[18]李瑞生,王曉雷,周逢權,等.靈巧潮流控制的電動汽車智能化充電站[J].電力系統保護與控制,2010,38(21):87-90.Li Ruisheng,Wang Xiaolei,Zhou Fengquan,et al.The system of electric vehicle intelligence charge station with smart power flow control[J].Power System Protection and Control,2010,38(21):87-90.
[19]周逢權,連湛偉,王曉雷,等.電動汽車充電站運營模式探析[J].電力系統保護與控制,2010,38(21):63-71.Zhou Fengquan,Lian Zhanwei,Wang Xiaolei,et al.Discussion on operation mode to the electric vehicle charging station[J].Power System Protection and Control,2010,38(21):63-71.
[20]張維戈,頡飛翔,黃梅,等.快換式公交充電站短期負荷預測方法的研究[J].電力系統保護與控制,2013,41(4):61-66.Zhang Weige,Xie Feixiang,Huang Mei,et al.Research on short-term load forecasting methods of electric buses charging station[J].Power System Protection and Control,2013,41(4):61-66.
劉東奇 男,1986年生,博士研究生,研究方向為電動汽車能量管理系統及其控制。
E-mail:liudq@hnu.edu.cn(通信作者)
王耀南 男,1958年生,教授,博士生導師,研究方向為智能控制理論、機器人系統及電力電氣行業重大工程綜合自動化控制系統。
E-mail:yaonan@hnu.cn
Research of V2G Smart Charging Station Control Strategy Using T-S Fuzzy Controller
Liu Dongqi Wang Yaonan Shen Yongpeng
(College of Electrical and Information Engineering Hunan University Changsha 410082 China)
AbstractThis paper presents a control strategy for electric vehicle smart charging station in vehicle-to-grid(V2G)scenario.Firstly,the architecture and principle of the smart charging station are introduced.Then,a Takagi-Sugeno fuzzy logic controller is designed to control the power flow between EVs and grid depending on the battery state of each EV and the present grid condition.After that,a power distribution method is presented to distribute power to each individual EV according to its battery state and preset charging time.Simulation results demonstrate that the proposed control strategy can effectively allocate charging/discharging of the electric vehicle based on the grid condition and each EV’s battery state.
Keywords:Vehicle to grid,electric vehicle,grid connection,smart charging station,Takagi-Sugeno fuzzy logic controller
作者簡介
收稿日期2014-03-10 改稿日期 2014-10-28
中圖分類號:TM76;U469.72+
