基于嵌入式系統的多功能自理床控制系統
2016-05-10 13:00:33趙立蕊連翠玲
河北工業科技 2016年2期
關鍵詞:嵌入式
趙 旭,趙立蕊,連翠玲
(1.河北省自動化研究所,河北石家莊 050081;2.河北工業職業技術學院信息工程與自動化系,河北石家莊 050091)
?
基于嵌入式系統的多功能自理床控制系統
趙 旭1,趙立蕊2,連翠玲1
(1.河北省自動化研究所,河北石家莊 050081;2.河北工業職業技術學院信息工程與自動化系,河北石家莊 050091)
摘 要:針對社會人口老齡化帶來的護理需求,設計了基于嵌入式系統的多功能自理床控制系統,可實現床體體位變換、被護理人員自理和報警功能的自動控制,適合行走不便的殘疾人和臥床病人使用,可在一定程度上安撫使用者的消極心理,并降低護理人員的工作強度。
關鍵詞:自動控制技術;嵌入式;自理床;控制系統;WinCE;體位變換
E-mail:yonlone@163.com
趙 旭,趙立蕊,連翠玲.基于嵌入式系統的多功能自理床控制系統[J].河北工業科技,2016,33(2):178-182.
ZHAO Xu,ZHAO Lirui,LIAN Cuiling.Multifunctional self-care bed control system based on embedded system[J].Hebei Journal of Industrial Science and Technology,2016,33(2):178-182.
伴隨著人口老齡化現象的加劇,因身體虛弱臥床不起或因疾患導致生活不能自理的老年人的家庭照料與看護成為國家所面臨的共同問題。隨著醫療水平的快速發展及使用者對醫療護理器械的需求的提升,近些年在市場上出現了一些自理床,其設計理念不同于傳統醫療護理器械,而更多體現了人文關懷,不僅考慮到使用者的體力、感知能力、認識能力及動作靈巧性,而且更多地關注病患與家屬的情感需求[1-3]。
筆者以嵌入式系統的觸控一體機作為控制核心,設計多功能自理床控制系統。應用該系統的自理床可實現靠背升降、左右側翻、腿部抬落、成椅子型等體位變化功能,并且支持智能便桶,能夠讓使用者實現大小便的基本自理。它還支持有線或無線上網,并且預留接口,能夠在日后實現更多功能擴展,滿足使用者基本的生活需求。此類自理床適合行走不便的殘疾人和臥床病人使用,可在一定程度上安撫使用者的消極心理,而且能夠降低護理人員的工作強度。
1 總體設計
多功能自理床控制系統的組成如圖1所示。該系統包括主控核心、操作控制器、動作執行機構、傳感系統、護理管理系統等部分[4-9]。主控核心由基于嵌入式系統的觸控一體機及擴展I/O電路組成,其相當于整個系統的“大腦”,通過獲得的數據來指揮執行機構動作。操作控制器分為護欄控制器和手柄控制器,這兩種控制器均有功能按鍵,按下相應按鍵可實現與之對應的動作。動作執行機構主要由各活動關節的電動推桿及其控制器組成,其受控于主控核心。傳感系統包括限位開關、溫度傳感器、液位開關、漏液傳感器等,主控核心可通過傳感器的信號來確定如何發布指令。護理管理系統主要面向護理人員,能夠提供數據交互、記錄、查詢等功能,護理人員通過這些功能可實現對被護理人員的身體狀態管理和信息管理。
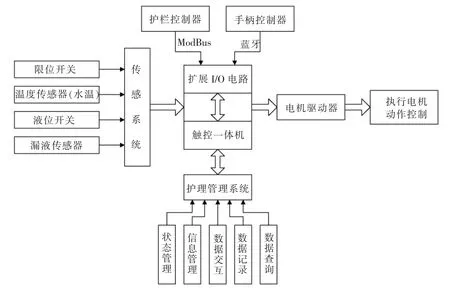
圖1 系統組成示意圖Fig.1 Sketch map of system components
2 系統設計
2.1 主控核心的選擇
本系統的主控核心用的是如圖2所示的LJD-eWin-模組型觸控一體機。其以32位高速ARM處理器作為主CPU,操作系統為Windows CE6.0。該機具有256 MB的RAM,128 MB的電子硬盤,可擴展SD卡存儲器,屏幕采用800×600的觸摸屏,同時具備了RS232/485串口、USB接口,并可擴展藍牙通信模塊,來滿足應用需求。
觸控一體機編有控制/管理軟件,通過觸摸屏上的虛擬按鍵可實現床體控制、信息管理等如下功能。
1)床體動作控制 通過按下屏幕上的對應按鍵實現自理床各種形態變換的控制。
2)管理功能 床位信息管理,可由護理人員輸入床位編號、所在位置等;被護理人員信息管理,包括姓名、年齡、性別、所患疾病等,同樣由護理人員輸入;醫囑管理,可將醫囑信息輸入至觸控一體機。

圖2 LJD-eWin-模組型觸控一體機Fig.2 LJD-eWin-module type touch all-in-one machine
3)數據查詢 可對歷史數據進行查詢,以便于更好地對使用者進行護理。
另外,為節能環保,當觸摸屏2min內沒有進行操作時,屏幕自動黑屏。
2.2 操作控制器的設計
本系統的操作控制器共有2種,分別為手柄控制器和護欄控制器,兩者的按鍵功能基本相同,只是使用對象不同,前者供被護理人員使用,后者則由護理人員操作使用。手柄控制器和護欄控制器都是基于51系列單片機進行設計[10-12]。兩者的區別是手柄控制器采用藍牙通信模塊HC-05,護欄控制器通過ModBus協議與主控核心進行通信。
手柄控制器設計圖如圖3所示,可供使用者實現臥床時的姿勢變換及大小便自理。控制器上共有13個主要按鍵,其中“上升”和“下降”按鍵控制自理床靠背的上升、下降;“左翻”和“右翻”鍵可幫助使用者實現左右翻身;“椅出”按鍵可使自理床變形成椅子;“桶進”按鍵可使便桶自動到位供被護理者使用,完畢后按下“桶出”鍵使便桶回位;便后可按下“沖水”或者“風干”按鍵進行沖水及風干,并可按下“水調溫”或“風調溫”按鍵調節便后沖洗的水溫和風溫;當使用者感到不適時,可按下“呼叫”按鍵通知相應人員;“急停”按鍵可使所有動作停止,返回到初始狀態。這些按鍵具有一定的關聯性,比如只有在平床狀態才可左右翻身,在“桶進”的狀態下才能沖水和風干等。

圖3 手柄控制器設計圖Fig.3 Handle controller design
手柄控制器的原理示意圖如圖4所示。其采用51系列單片機進行設計,P1口除P1.0用作急停按鍵直接接入外,P1.1—P1.7以行列鍵盤的形式定義其余的12個按鍵。6個功能指示燈用P2.0—P2.5控制,串口通信接口TXD和RXD通過MAX232接到藍牙通信模塊HC05上,實現與主控核心的無線通信。

圖4 手柄控制器原理示意圖Fig.4 Handle controller schematic
2.3 系統控制
本系統共計有DI量20~26點,包括備用DI量4~8點,用于動作限位、啟停信號、報警信號等;DO 量23~31點,包括備用DO量4~8點,用于動作執行電機控制、泵/閥控制、輸出報警信號等。DI/DO信號統計示意圖如圖5所示。

圖5 DI/DO信號統計示意圖Fig.5 DI/DO signal statistics
2.3.1 體位變換功能的控制
該控制系統可按需求實現靠背抬起、落下,腿部彎曲、伸直,左右側翻,左右護欄起、落及將整床變形成椅子狀等體位變換。體位變換功能由6個直線電機帶動相應執行機械結構完成,分別對應靠背、足部、左護欄、右護欄、床面左翻、床面右翻等動作需求。直線電機采用醫用直線推桿,根據床體結構的受力大小選擇不同規格,由繼電器控制伸出或收回。床體各活動部位均有限位開關,可保證床體結構的合理運行。
2.3.2 自理功能的實現控制
本自理床控制系統的突出特點之一便是盡可能地讓使用者實現基本自理,而最主要的就是自理大小便。本系統的便桶設計參考智能馬桶蓋,具有3檔水溫、風溫控制,可實現便后溫水沖洗及熱風風干功能。便桶裝有生物降解劑,可人為按鍵實現降解及滅菌,保持自理床的清潔。
當使用者想要大小便時可按下“桶進”按鍵,便桶自動到位供其使用,便后可按下“沖水”按鍵,此時自理床的水泵自動抽取水箱內的存水加熱后沖洗身體,沖洗過程中可根據自身的舒適程度進行高、中、低3檔水溫調節,沖洗最大時長為15s,到時自動停止,使用者也可隨時按鍵停止;如需使皮膚快速干燥,可按下“風干”按鍵吹出熱風,風溫也可調節,吹風到時自動停止或按鍵停止。使用者便后可隨時按下“桶出”鍵,便桶自動返回原位。本控制系統可接漏液傳感器,當有尿濕、灑水等情況發生時,可報警通知相關人員處理。
2.3.3 報警功能的實現控制
使用本系統的自理床雖能讓使用者實現基本自理,但由于使用者的特殊身體狀況,這個“自理”并不是絕對意義上的自己照顧自己,而是仍需要護理人員參與護理,以免發生意外。出現特殊情況時,使用者可主動呼叫護理人員,自理床控制系統也可發出報警信號通知護理人員前來緊急處理。
1)使用者按下“呼叫”按鍵 按鍵后,系統便會通知護理人員前來護理,該情況是使用者主動呼叫護理人員。
2)漏液報警(尿濕報警) 當自理床出現尿濕或灑水等情況,控制系統的漏液傳感器會及時發現這一情況并報警。
3)缺水報警 由于自理床系統的供水來自床體安裝的水箱,如水箱缺水則影響使用者便后的沖洗,這時,水箱的液位傳感器便發出報警信號通知護理人員前來加水。
4)離床報警 為避免使用者發生意外,床體四周裝有紅外傳感器,當使用者主動或被動離床后可發出報警信號通知護理人員參與處理。
3 系統軟件設計
本系統的軟件分為下位機控制軟件和觸控一體機護理管理軟件。下位機控制軟件由KeilC編制,由按鍵查詢響應、I/O控制、數據通信等部分組成。本系統的觸控一體機為嵌入式系統,其處理器是ARM9的S3C2416,操作系統是Windows CE6.0,因此在編程上,采用微軟公司的Visual Studio系列較為合適。本系統的護理管理軟件正是用其集成的VB.net進行編制,而其詳細開發、部署過程在此不加贅述。觸控一體機護理管理軟件系統界面如圖6所示[13-18]。
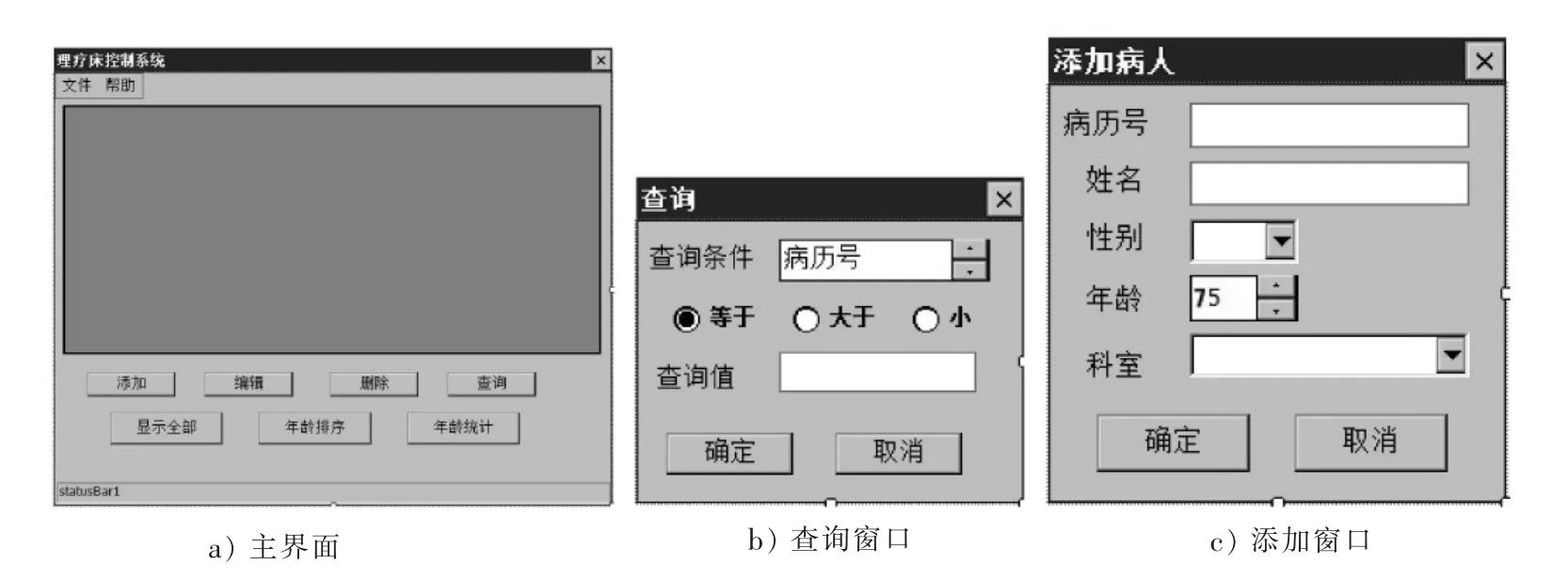
圖6 觸控一體機護理管理軟件系統界面Fig.6 Touch all-in-one machine care management system software interface
4 結 論
目前嵌入式系統以其可靠的性能、較低的價格、精簡的系統、強大的功能等優點得到了越來越廣泛的應用。本設計將嵌入式系統應用于自理床上,在完善功能的同時還可降低護理人員的勞動強度。在當今中國人口老齡化現象日趨嚴重的背景下,該系統有著廣闊的應用前景。
參考文獻/References:
[1] 楊達毅,孫慶春,劉錫敏,等.多功能自理床的研制[J].機械制造,2008,46(1):43-45. YANG Dayi,SUN Qingchun,LIU Ximin,et al.Development of multifunctional self bed[J].Machinery,2008,46(1):43-45.
[2] 郭劍鋒.改進的全自動多功能自理床[J].科技潮,2009(1):28.GUO Jianfeng.Improved automatic multifunction self bed [J].Technology Tide,2009(1):28.
[3] 佚名.老有所依的智能化生活(二)[J].機器人技術與應用,2013(2):41 ANONYMOUS.Old age of intelligent life(Ⅱ)[J].Robot Technique and Application,2013(2):41.
[4] 張群,楊絮,張正言,等.藍牙模塊串口通信的設計與實現[J].實驗室研究與探索,2012,31(3):79-82.ZHANG Qun,YANG Xu,ZHANG Zhengyan,et al.Design and realization of serial communication in bluetooth module [J].Research and Exploration in Laboratory,2012,31(3):79-82.
[5] 鄧元生,李力爭.Modbus協議在多機系統開發中的應用[J].微計算機信息,2009,25(5-2):264-265.DENG Yuansheng,LI Lizheng.The application of Modbus among the multi-systems[J].Microcomputer Information,2009,25(5-2):264-265.
[6] 王淼.自理護理在老年腦梗死患者中的應用及效果[J].當代護士(中旬版),2015(3):18-19.WANG Miao.Application and effect of self care in elderly patients with cerebral infarction[J].Today Nurse(Midmonth),2015(3):18-19.
[7] 汪燁.多功能電動護理床控制系統研制[J].制造業自動化,2009,31(6):70-71.WANG Ye.Development of control system for multifunction nursing-bed[J].Manufacturing Automation,2009,31(6):70-71.
[8] 譚林,魯守銀,張偉,等.機器人化護理床及其控制系統[J].山東建筑大學學報,2010,25(1):18-20.TAN Lin,LU Shouyin,ZHANG Wei,et al.A robotic nursing bed and control system[J].Journal of Shandong Jianzhu University,2010,25(1):18-20.
[9] 北京藍海微芯科技有限公司.LJD-eWinV5-ET(K)7產品規格書[EB/OL].http://www.bluemcu.com/pic/files/LJD-eWinV5-ET(k)7.pdf,2015-04-28.
[10]于永,戴佳,劉波.51單片機C語言常用模塊與綜合系統設計實例精講[M].北京:電子工業出版社,2007.
[11]耿永剛.51單片機C51應用技術[M].北京:電子工業出版社,2011.
[12]張道德.單片機接口技術(C51版)[M].北京:水利水電出版社,2007.
[13]洪一新,吳燦銘.Visual Basic程序設計完全自學教程[M].北京:清華大學出版社,2009.
[14]張琴,孫更新,賓晟.Visual Basic.NET2008從基礎到項目實戰[M].北京:化學工業出版社,2007.
[15]劉俊強.SQL Server 2008入門與提高[M].北京:清華大學出版社,2014.
[16]YY 0571—2013,醫用電氣設備 第2部分:醫院電動床安全專用要求[S].
[17]姜波.Windows Embedded CE6.0程序設計實戰[M].北京:機械工業出版社,2009.
[18]杜云,隋博,孟凡華,等.自動避障三輪管道機器人設計[J].河北科技大學學報,2014,35(5):447-453.DU Yun,SUI Bo,MENG Fanhua,et al.Design of threewheeled pipeline robot with autonomous obstacle avoidance [J].Journal of Hebei University of Science and Technology,2014,35(5):447-453.
Multifunctional self-care bed control system based on embedded system
ZHAO Xu1,ZHAO Lirui2,LIAN Cuiling1
(1.Hebei Institute of Automation,Shijiazhuang,Hebei 050081,China;2.Department of Information Engineering and Automation,Hebei College of Industry and Technology,Shijiazhuang,Hebei 050091,China)
Abstract:Aiming at the increased requirement for medical apparatus and instruments in China and the increasing needs for nurse caused by social aging of population,a multifunctional self-care bed control system based on embedded systems is designed.It can realize bed posture conversion,patients'self-care,and automatically controlled alarm function,suiting for the disabled who are inconvenient to walk and the bedridden patients,and it can in some degree pacify the patients while decrease the work intensity of the nurses.
Keywords:automatic control technology;embedded;self-care bed;control system;WinCE;position change
作者簡介:趙 旭(1975—),男,河北石家莊人,高級工程師,主要從事自動控制應用方面的研究。
收稿日期:2015-12-13;修回日期:2016-01-18;責任編輯:張 軍
文章編號:1008-1534(2016)02-0178-05
中圖分類號:TP306
文獻標志碼:A
doi:10.7535/hbgykj.2016yx02014
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
