基于Arduino UNO平臺的多適配性無人機避障技術
2016-05-14 07:42:42王力群林朝輝
科技創(chuàng)新導報 2016年9期
關鍵詞:無人機
王力群 林朝輝
摘 要:針對多旋翼無人機的安全避障問題,該文提出一種基于Arduino UNO的多適配性無人機避障技術。該技術基于 ATmega328P單片機的Arduino UNO硬件平臺,并選取XL-MaxSonar-EZ系列的超聲波傳感器對無人機與障礙物之間的距離進行在線測量,完成一種多適配性的無人機避撞系統(tǒng)硬件及軟件設計,并在多旋翼無人機平臺上進行多次飛行試驗驗證。試驗結果表明,該系統(tǒng)的兼容性較好,可與各種飛控系統(tǒng)及遙控接收機實現(xiàn)無縫連接,簡潔高效地實現(xiàn)多旋翼避障的目的,在無人機安全領域具有一定的實用價值。
關鍵詞:Arduino UNO 多適配性 避障 無人機
中圖分類號:TP391 文獻標識碼:A 文章編號:1674-098X(2016)03(c)-0018-02
隨著無人機技術的快速發(fā)展,多旋翼飛行器以其機械結構簡單、機動性好、懸停凝視、定點懸拍、垂直起降等優(yōu)點,已成為當前許多國家或科研機構的研究熱點,在軍事和民用多個領域也都有廣闊的應用前景。然而,隨著無人機民用化的持續(xù)加速,面對復雜的場景和成本控制要求,越來越多的安全問題體現(xiàn)了出來,無人機撞機傷人事件屢見不鮮,有效提高無人機的安全性已迫在眉睫。
無人機自主避障系統(tǒng)能夠有效的避免撞機傷人,減少損失,對無人機的普及無疑是一大利好消息。所謂無人機自主避障功能,就是無人機飛行器在飛行的過程中遇到障礙物的時候,通過自動提前識別、有效規(guī)避障礙物,達到安全飛行的效果,就目前而言,主流的多旋翼無人機避障系統(tǒng)主要有三種,分別是超聲波、TOF以及相對更加復雜的由多種測距方法和視覺圖像處理組成的復合型方法,但無論哪種方法都僅僅針對特定的飛行控制系統(tǒng),在不了解飛控系統(tǒng)軟硬件架構的情況下,現(xiàn)有的避障系統(tǒng)不具備良好的適配性,有一定局限性。由于目前現(xiàn)有的飛行控制系統(tǒng)基本均接收遙控器接收機的標準信號,因此,該文在接收機和飛控系統(tǒng)之間增加避障系統(tǒng),采集遙控器接收機輸出的信號并根據(jù)避障測距傳感器所測量的無人機與障礙物之間的距離,重構出遙控器信號輸送給飛行控制模塊,可以在不改變飛控軟硬件的情況下實現(xiàn)精確避障,這樣就能夠有效克服了傳統(tǒng)的避障系統(tǒng)設計周期長、成本高及風險高的缺點,極大的提高開發(fā)效率。
1 系統(tǒng)架構總體設計
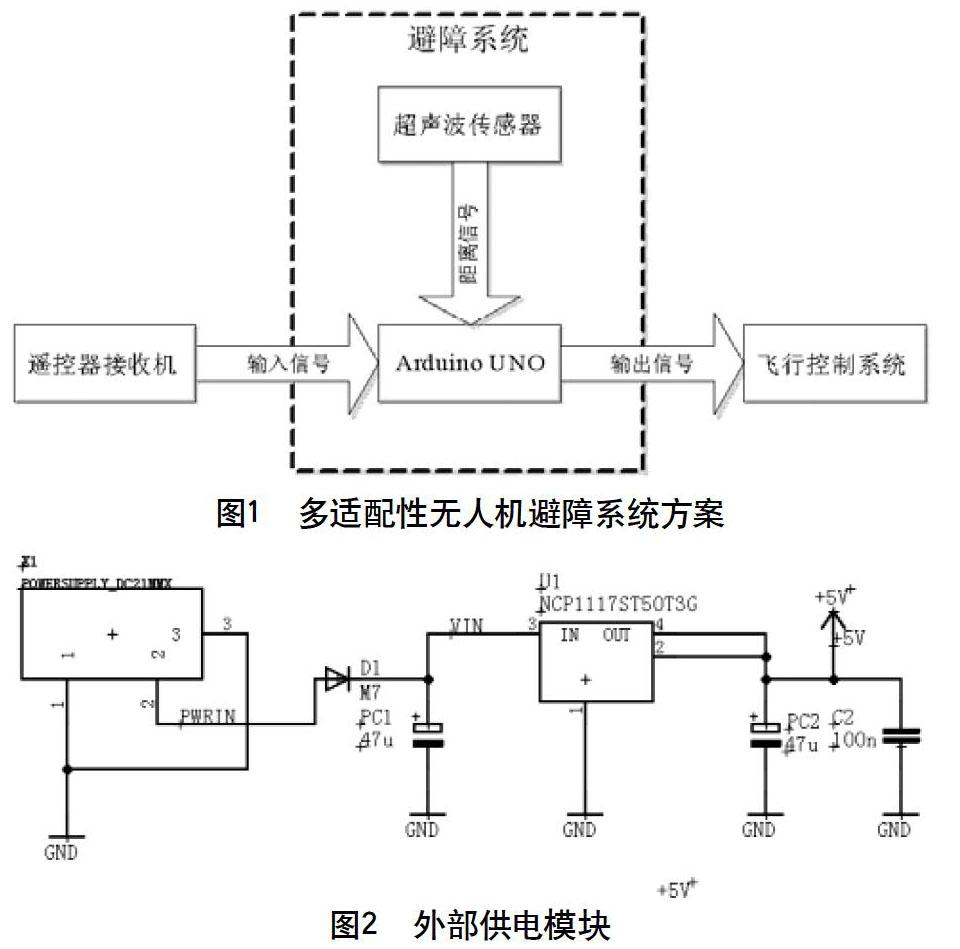
多適配性無人機避障系統(tǒng)總體方案如圖1所示,避障系統(tǒng)介于遙控接收機與飛行控制系統(tǒng)之間,其主要包括超聲波傳感器及Arduino UNO平臺。其中,超聲波傳感器用于測量無人機與障礙物之間的距離,Arduino采集遙控器接收機輸出的信號,并根據(jù)所采集的距離進行邏輯判斷,重構出遙控器信號輸送給飛行控制系統(tǒng)PWM輸入端,從而控制無人機的電子調速器來控制飛行的姿態(tài)以達到避障的目的。
2 硬件設計
2.1 電源模塊
由于該系統(tǒng)中Arduino UNO控制板為無人機記載設備,因此使用外接電源進行輸入,圖2為外部供電模塊原理圖,其中,X1是電源輸入口,電源的輸入的范圍為7~12 V,圖中D1是二極管,二極管的特性是單向導通。使用二極管的目的是:即使電源輸入的正反極性反轉,也不會燒毀線路板上的元器件。
2.2 Arduino UNO與飛控接口
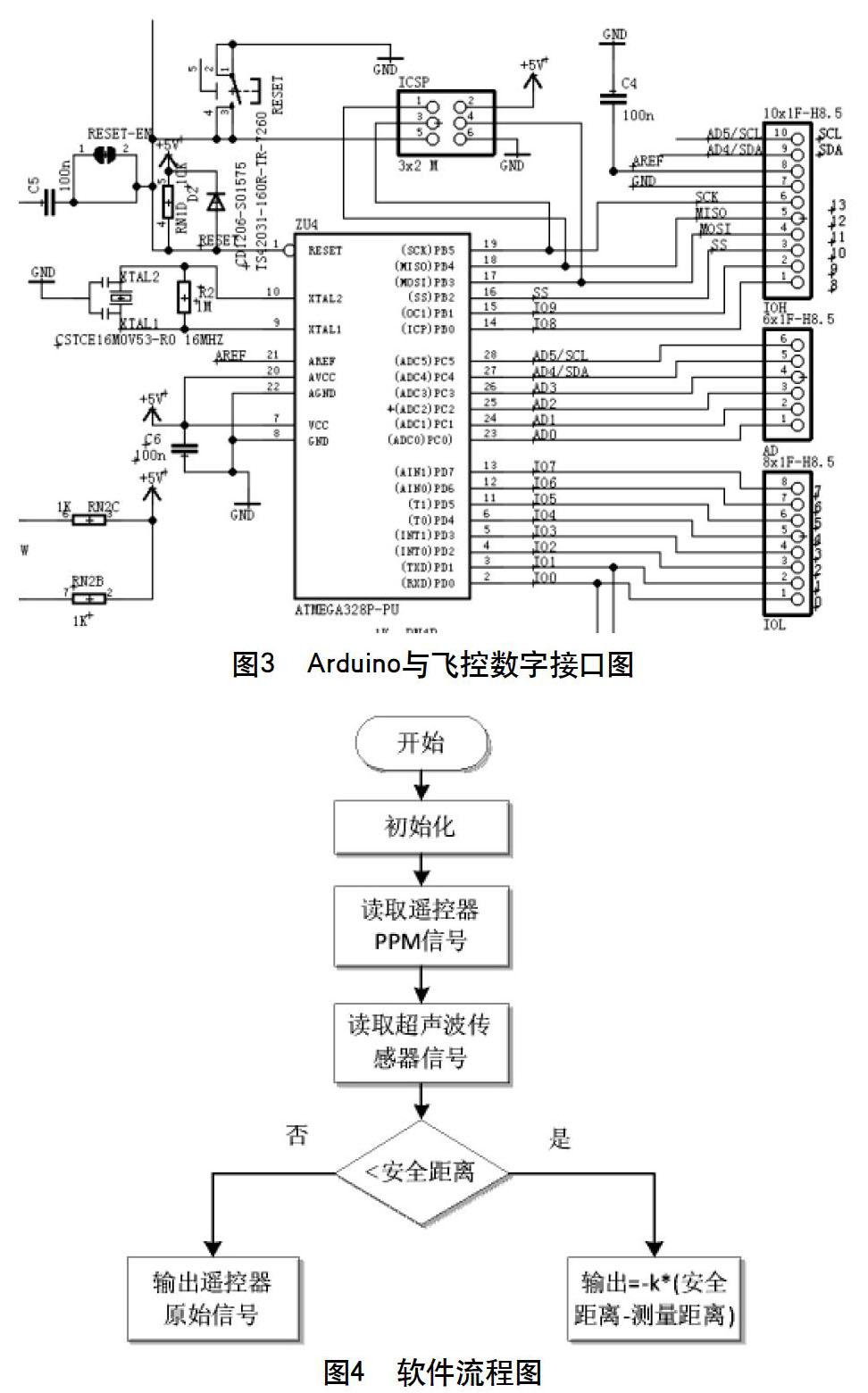
Arduino UNO控制板與飛控系統(tǒng)之間選擇14路數(shù)字輸入輸出接口,工作電壓為5 V,每一路能輸出和接入最大電流為40 mA。每一路配置了20~50 kΩ內部上拉電阻。引腳的特定功能:串口信號RX(0號)、TX(1號)可與內部USB-to-TTL芯片相連,提供TTL電壓水平的串口接收信號;外部中斷(2號和3號)為觸發(fā)中斷引腳,可設成上升沿、下降沿或同時觸發(fā);脈沖寬度調制PWM(3、5、6、9、10、11)可以提供6路8位PWM輸出;SPI(10(SS),11(MOSI),12(MISO),13(SCK))可以SPI通信接口;LED(13號)顧名思義是Arduino專門用于測試LED的保留接口,輸出為高時點亮LED,反之輸出為低時LED熄滅。圖3為Arduino與飛控數(shù)字接口圖。
2.3 超聲波傳感器選型
系統(tǒng)選用XL-MaxSonar-EZ系列的MB1212超聲波傳感器進行測距,其適用于I2C通訊接口,它有高效的聲波功率輸出,可實時自動校準,以確保用戶不斷變化的條件(電壓和聲學或電噪聲),接受范圍內的每個讀數(shù),自行得出最準確的數(shù)值。其供電電壓為3.3~5 V,提供了由短至長的范圍探測和測距,檢測距離為0~765 cm,可以在-40 ℃~+65 ℃溫度范圍內工作。工作時它不受物體的顏色和其他視覺特征的影響,而是采用高頻率的聲波進行檢測,符合避障傳感器的需求。
3 軟件設計
3.1 軟件流程
多適配性無人機避障系統(tǒng)軟件流程如圖4所示,Arduino Uno控制板接收遙控器接收機輸出的PPW信號,并采集超聲波傳感器所測量的無人機與障礙物之間的距離信號,進行信號判斷處理,重構出遙控器信號輸送給飛行控制系統(tǒng),若判斷結果大于安全距離則輸出遙控器原始信號,飛機按計劃正常飛行,若判斷結果小于安全距離,則傳遞給飛控系統(tǒng)的遙控器信號輸出=-k*(安全距離-測量距離),其中,k為一個正系數(shù),表征避障效果強度,即k值越大,避障反應越強烈。
3.2 算法實現(xiàn)
基于上述流程,在Arduino開發(fā)平臺進行了軟件實現(xiàn)。將安全距離設定400 mm,代碼中的控制只選用了副翼和升降舵作為控制通道,獨立了油門和方向舵通道,目的是若發(fā)生意外情況,飛手可操控油門通道讓飛機停止工作,保證重要系統(tǒng)工作的獨立穩(wěn)定性。首先進行測距,得出前方距離distance,注意distance為浮點全局變量;后對distance做了一次濾波:如果distance大于等于400,則distance賦值為400。可以看出,如果測出的距離是400那么變量delta就為0。如果距離是300,那么delta就是100,所以給飛機一個0~400雷達范圍,當距離為400或者大于400時則系統(tǒng)認為是沒有障礙物的,當有障礙物進入范圍后,這個delta的作用就是測出障礙物進入雷達范圍邊緣的距離,也可理解為超邊緣距離,而后,將這個delta除以4,作用是給delta做一個比例P,這個比例P的大小為1/4。最后,將delta作用在OUTELE=OUTELE-delta;這樣飛機遇到障礙物后,會根據(jù)障礙物的遠近做出避讓,障礙物越近,那么delta越大,避障動作越大,實現(xiàn)避開障礙目的。
4 實驗結果
為驗證系統(tǒng)設計的有效性,該文基于四軸八槳的多旋翼飛行平臺,分別選擇大疆公司的A2飛控及3DR公司的APM系統(tǒng),進行飛行試驗驗證。在兩個試驗中,當飛行器以平穩(wěn)的速度靠近障礙時,均可得到快速的避撞響應,當后退至安全距離后飛行器自主懸停。遙控器也可參與飛機姿態(tài)的控制,保證了飛行器的安全,達到了預期避障的要求。
5 結語
該文將超聲速傳感MB1212與Arduino UNO平臺相結合,通過超聲波實時采集無人機與目標障礙物之間的距離,利用嵌入式軟件進行信號判斷處理,重構出遙控器信號輸送給飛行控制系統(tǒng)進行避障控制,進而實現(xiàn)了一種多適配性無人機避障系統(tǒng)的軟硬件設計。通過基于不同飛控系統(tǒng)的外場飛行實驗,該設計在無需了解飛控內部信息的情況下,可高效簡潔地實現(xiàn)避障。整體設計具有成本低、可靠性高、算法復雜度低和可擴展等優(yōu)點,具有很強的實用性。
參考文獻
[1] 趙立峰,張凱,王偉.多旋翼無人機位置控制系統(tǒng)設計[J]. 計算機測量與控制,2016(3):24-28.
[2] 劉曉玲,丁保全.基于STM32的多旋翼無人機超聲波測距系統(tǒng)[J].物聯(lián)網技術,2016(2):13-16.
[3] 常國權,戴國強.基于STM32的四軸飛行器飛控系統(tǒng)設計[J].單片機與嵌入式系統(tǒng)應用,2015(2):29-32.
[4] 王剛.基于Arduino Uno平臺的跌倒檢測報警系統(tǒng)設計[J].單片機與嵌入式系統(tǒng)應用,2015(7):49-52.
[5] JimeNez F,Lara F,Redel R.API for communication between Labview and Arduino UNO [J].IEEE Latin America Transactions, 2014(12):971-976.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導報(2016年9期)2016-05-26 20:58:26
