融合子塊梯度與線性預測的單高斯背景建模
2016-05-14 10:01:54楊文浩李小曼
計算機應用 2016年5期
楊文浩 李小曼
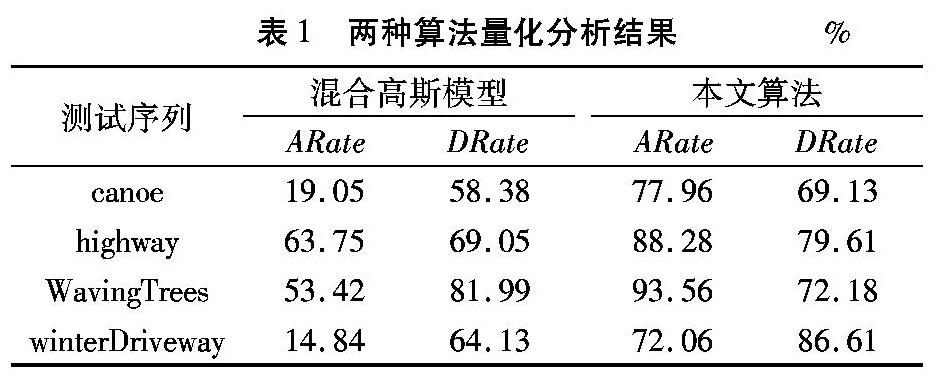
摘要:針對單高斯背景模型不能適應非平穩場景且對初期保持靜止后期運動的物體造成“鬼影”現象的問題,提出了融合子塊梯度與線性預測的單高斯背景建模方法。首先,對每個像素點進行單高斯背景建模,并實現像素級的自適應更新,運用子塊梯度算法將梯度在閾值內的子塊作為背景以消除“鬼影”;然后,將子塊梯度法獲得的前景與單高斯模型確定的前景做與運算,提高在非平穩場景下對背景的判斷能力;最后,運用線性預測方法處理獲得的前景點,將面積小于閾值的連通區域還原為背景。采用CDNET 2012 Dataset和Wallflower Dataset進行仿真實驗:當場景變化幅度較大時,所提算法與混合高斯模型(GMM)相比,雖然檢測率稍有下降,但檢測精度提高了40%;在其他場景中檢測率雖只提高約10%,檢測精度卻能提高25%以上。實驗結果表明,融合子塊梯度與線性預測的單高斯背景建模能夠適應非平穩場景并消除“鬼影”現象,獲得的背景比混合高斯模型更精確,提取的前景細節更豐富。
關鍵詞:非平穩場景;鬼影;單高斯模型;子塊梯度;線性預測
中圖分類號:TP391.9 文獻標志碼:A
Abstract:In order to solve the problem that the Single Gaussian Model (SGM) for background could not adapt to nonstationary scenes and the "ghost" phenomenon due to sudden moving of a motionless object. An SGM for background using blockbased gradient and linear prediction was put forward. Firstly, SGM was implemented on the pixel level and updated adaptively according to the changes of the pixels values, at the same time the frame was processed by the blockbased gradient algorithm, obtaining the background by judging whether the gradient of subblock was within the threshold value and eliminating "ghost"; and then foreground from the blockbased gradient algorithm and that from the SGM were made "AND" operation, improving the judgment of the background in nonstationary scenes; lastly the linear prediction was employed to process the foreground acquired from the previous operation, resetting the connected regions whose area was less than the threshold value as the background. Simulation experiments were conducted on the CDNET 2012 dataset and Wallflower dataset. In the scenes which varied by a large margin, the accuracy of the proposed method was 40% higher than that of the Gaussian Mixture Model (GMM) in spite of the fact that the detection rate of the proposed method was lower than that of GMM; but in other scenes, the rate of detection was 10% higher and the accuracy was 25% higher. The simulation results show that the proposed method is able to accommodate to the nonstationary scenes and achieve the goal of wiping the "ghost" off, as well as obtain a better result of the background and more detailed foreground than GMM.
Key words:nonstationary scene; ghost; Single Gaussian Model (SGM); blockbased gradient; linear prediction
0 引言
背景建模目前廣泛地應用于視頻處理中,與光流法、均值法等算法相比,背景建模具有抗噪能力較強、精度較高的優點,為提高目標檢測的準確性,背景模型的建立就成為了關鍵[1]。在實際應用環境中,背景可能會經常發生變化,這在建模過程產生了干擾,一個有效的背景模型應能解決視頻中以下問題[2]:
1)背景模型的提取。背景的獲取最理想的情況是初始時沒有任何運動物體,但是許多場合都無法滿足這一要求。
2)背景的輕微運動。背景物體自身會有一些運動,這些運動的背景不應成為檢測目標。
3)外界光線的變化。室外光照的自然變化、室內開關燈都會對運動目標的檢測造成干擾。
4)陰影的影響。運動物體的陰影同樣會被檢測,在一些應用環境下會對后續的處理造成影響。
Wren等[3]提出的單高斯模型(Single Gaussian Model, SGM)從統計的角度假設灰度變化服從正態分布,將灰度變化超出閾值的像素點判定為前景點,在平穩場景下取得較理想的效果;但由于沒有將像素的時空信息結合起來考慮,非平穩場景易對單高斯模型產生較大干擾,造成誤判且無法校正。對此,研究人員進行了相應改進:李偉生等[4]對像素點分別建立時間背景模型和空間背景模型,采用不同的更新策略,較好地解決了非平穩場景造成的問題。與單高斯模型對每個像素點單獨建模相比,黃大衛等[5]將每幀劃分成塊后,采用分塊單高斯建模的方法提高了檢測效果,增強了魯棒性。陳銀等[6]將單高斯模型與MeanShift算法結合,使用MeanShift算法對單高斯模型確定為前景的像素點進行修正,實現了自適應變化的目標。借鑒子塊梯度法對局部運動不敏感,適用于非平穩場景的特點,本文對各像素點建立背景模型進行像素級的自適應更新,并融合了子塊梯度法和線性預測方法,對原有算法進行改進,較好地解決了背景局部運動造成的誤判和物體先期靜止后期運動造成的“鬼影”問題。
由于單高斯模型自身的局限,無法適應非平穩場景且不能適應物體由靜而動的變化。當背景發生局部運動時造成大量的誤判,且不可修正;對于先期靜止,后期運動的物體,單高斯模型也會造成“鬼影”。本文引入子塊梯度法來改善。
1.2 子塊梯度法
子塊梯度法對背景的局部運動不敏感,更適用于非平穩場景,提取出的運動目標較為粗糙,不適于對運動目標分割要求較高的應用場合[9]。
在小的連通區域中有位于第1行或第1列的前景點時,采用平滑模板求均值的方法進行處理。其m×m鄰域中背景點權值為1,前景點權值為0,將背景灰度和的均值作為第1行或第1列的預測值;若鄰域中沒有背景點,則m=m+1,重復搜索,直到含有背景點為止[13]。
2 算法的實現
在t時刻同時運行單高斯模型與子塊梯度法處理幀It,將各自得到的前景做與運算后,使用線性預測進行處理。
1)單高斯模型的初始化中,對于L幀學習序列I0,I1,…,IL-1,默認每點均為背景點,設初始均值μ=1L∑L-1t=0It,初始標準差σ為給定值。
2)取當前幀,根據式(2)對像素點進行判斷,若是前景點則進行標記同時將該點最近一次背景參數進行記錄,當讀取下一幀時由式(2)判斷該點是否恢復為背景;否則由式(5)計算學習率,按照式(3)、(4)更新背景模型參數。
3)將當前幀與上一幀進行分塊,按照式(6)~(9)計算兩幀各子塊灰度特征τ,由式(10)得到各子塊梯度,將梯度值大于閾值的子塊內的像素點標記為前景;否則仍為背景。
4)將步驟2)中確定的前景點與步驟3)判斷出的前景點進行與運算,兩者均判定為前景點的才標記為前景;否則按照步驟2)中記錄的最近一次的背景參數更改為背景點,標準差設為初始值。
5)對步驟4)得到的前景進行連通性分析,連通區域面積小于閾值的認為是非平穩場景的運動造成的,按照式(12)恢復為背景,標準差設為初始值。
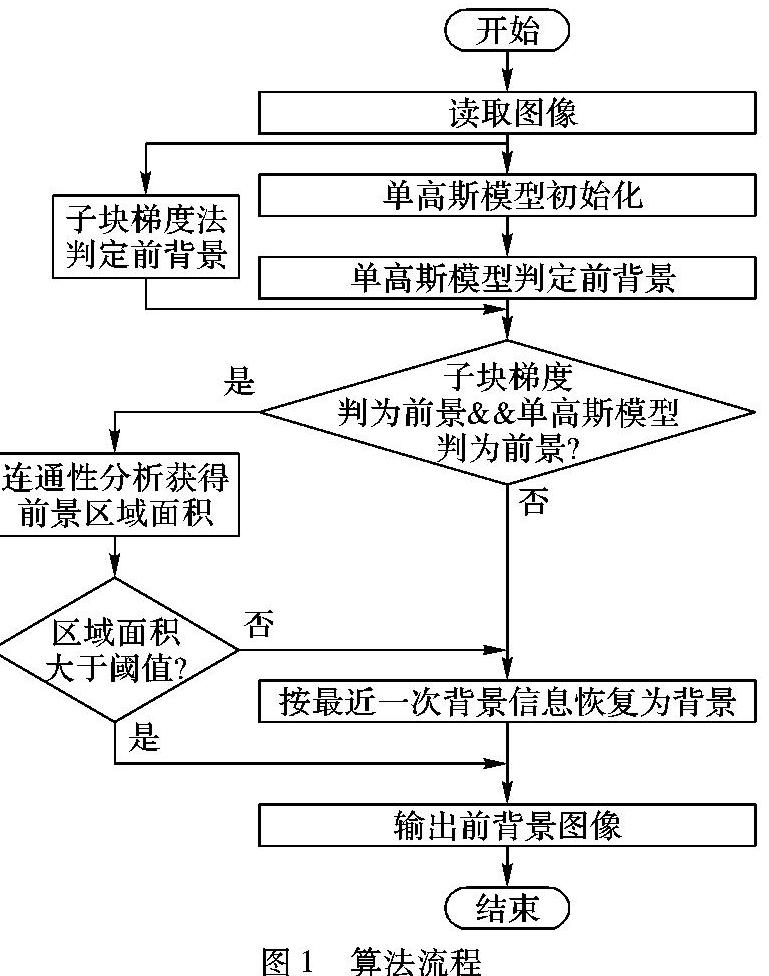
按照算法思想,算法流程如圖1所示。
3 實驗及結果分析
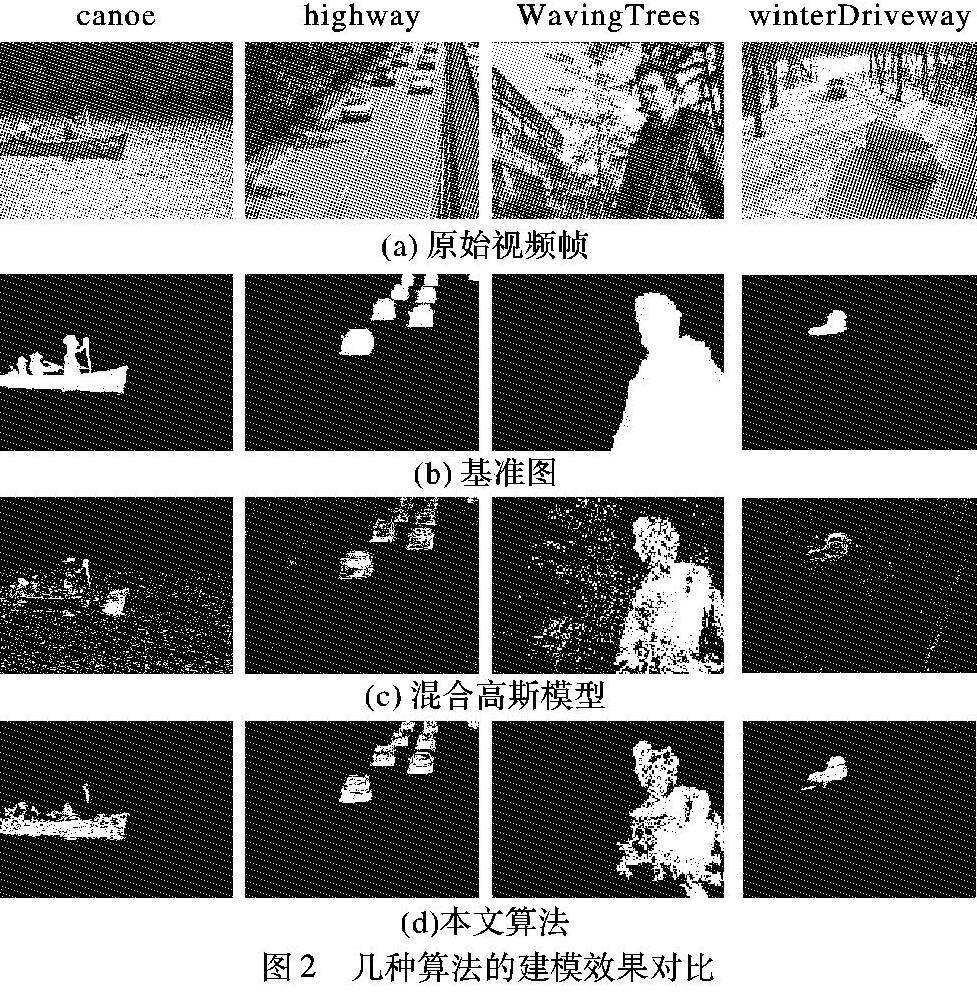
為驗證所提算法的有效性,在多個視頻序列進行測試,并與混合高斯模型的處理結果相比較。算法在CDNET 2012 Dataset和Wallflower Dataset數據集上進行測試。CDNET 2012 Dataset是包含背景動態變化、攝像機抖動、物體間歇運動、陰影、熱輻射等場景的數據集;Wallflower Dataset包含了7個不同的背景發生變化的場景。對CDNET 2012 Dataset中的canoe、highway、winterDriveway序列和Wallflower Dataset中的WavingTrees序列進行測試,實驗中canoe、highway、winterDriveway序列將每幀子塊的個數劃分為20×20,WavingTrees序列的為10×10;線性預測的面積閾值為子塊大小的1/4,處理結果如圖2所示。圖2中第1、2行為原始視頻幀和對應的基準圖,第3行為混合高斯模型處理的結果,第4行為本文算法處理結果。為能直觀地反映出算法效果,所有結果均未進行陰影去除、形態學濾波等后期處理。圖2(a)、(b)分別是canoe、highway序列,表征了自然環境中背景的輕微運動;圖2(c)是WavingTrees序列,表征了自然環境中背景的較大幅度運動;圖2(d)是winterDriveway序列,表征了前景先期靜止后期運動。
從對4個測試序列的處理結果可以看出,與混合高斯模型相比,本文算法在非平穩場景中能較大幅度削弱因背景物體運動造成的誤判。雖然混合高斯模型對每個背景像素值采用多個高斯分布的加權和來描述,但非平穩場景中背景物體的運動是沒有規律的,存在一些背景像素點因灰度值的變化超出了混合高斯模型的描述能力而被誤判為前景;而這些被誤判為前景的像素點并沒有進一步的處理。本文算法雖然只采用一個高斯分布來描述背景像素值的變化,但考慮到運動背景物體具有的空間相關性,引入子塊梯度算法,對限定范圍內運動的背景進行處理,降低了干擾;而且前景物體的運動會產生較大的區域面積,對面積過小的連通區域認為是被誤判為前景的像素點并采用線性預測的方法將其還原為背景。
圖2(d)中的運動車輛在前期是靜止的,由于混合高斯模型能對一個像素點建立多個高斯分布并進行在線更新,提高了相應分布的權重,避免了“鬼影”的出現;本文算法考慮到靜止區域灰度變化小的特點使用子塊梯度算法消除“鬼影”。
在WavingTrees序列處理結果中,與混合高斯模型相比,本文算法雖在檢測率上有所下降但大幅度提高了檢測精度。與其他3個測試序列相比,WavingTrees序列中的運動背景物體與其周圍區域灰度相差較大且運動范圍更廣,通過擴大子塊的尺寸來適應該序列的特點。由于前景自身有相似的部分且運動較慢,子塊梯度算法又放大了這種影響,造成前景部分消融,降低了檢測率;但同時因為子塊尺寸擴大削弱了樹枝晃動帶來的誤判,在檢測出的前景點變少的情況提高了檢測精度。
4 結語
本文提出了一種有效的背景建模算法,通過同時執行單高斯模型和子塊梯度算法,分別在像素和子塊水平上進行背景建模,將兩者得到的前景進行與運算,既消除了單高斯模型產生的“鬼影”也避免了前景細節粗糙的問題,而后運用線性預測算法對前景進一步提純。實驗結果表明,本文算法能較好地適應非平穩場景中背景物體的運動,消除了單高斯模型引起的“鬼影”現象。在背景變化幅度較大的場景中,為避免大范圍的誤判,本文算法在前景完整性略有欠缺,但檢測出的前景準確程度大幅提高;在背景輕微變化的場景中,本文算法無論在前景的完整性還是準確程度上都有較好的表現。但較好的檢測效果是建立在對不同的視頻序列調整參數的基礎上的,與混合高斯模型相比,通用性不足;且對于運動時間長的目標易發生內部消融的現象,在以后的研究中,將針對此問題進行改進。
參考文獻:
[1]PAL A, SCHAEFER G, CELEBI M E. Robust codebookbased video background subtraction[C]// Proceedings of the 2010 IEEE International Conference on Acoustics Speech and Signal Processing. Piscataway, NJ: IEEE, 2010: 1146-1149.
[2]方帥,薛方正,徐心和.基于背景建模的動態目標檢測算法的研究與仿真[J].系統仿真學報,2005,17(1):159-165. (FANG S, XUE F Z, XU X H. Moving object detection based on selfadaptive background modeling [J]. Journal of System Simulation, 2005,17(1):159-165.)
[3]WREN C R, AZARBAYEJANI A, DARREL T, et al. Pfinder: realtime tracking of the human body[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1997, 19(7): 780-785.
[4]李偉生,汪釗.基于時空背景模型的自適應運動目標檢測方法[J].計算機應用,2014,34(12):3515-3520.(LI W S, WANG Z. Adaptive moving object detection method based on spatialtemporal background model[J]. Journal of Computer Applications, 2014,34(12):3515-3520.)
[5]黃大衛,胡文翔,吳小培,等.改進單高斯模型的視頻前景提取與破碎目標合并算法[J].信號處理,2015,31(3):299-307.(HUANG D W, HU W X, WU X P, et al. The algorithm of video foreground extraction via improved single gauss model and merge of broken targets[J]. Journal of Signal Processing, 2015,31(3):299-307.)
[6]陳銀,任侃,顧國華,等.基于改進的單高斯背景模型運動目標檢測算法[J].中國激光,2014,41(11):11090021-11090029.(CHEN Y, REN K, GU G H, et al. Moving object detection based on improved single Gaussian background model[J]. Chinese Journal of Lasers, 2014,41(11):11090021-11090029.)
[7]王浩.動態前景分離方法研究[D].長沙:湖南師范大學,2011:21. (WANG H. Research of dynamic foreground separation[D]. Changsha: Hunan Normal University, 2011:21.)
[8]盛驟,謝式千,潘承毅.概率論與數理統計[M].4版.北京:高等教育出版社,2008:382. (SHEN Z, XIE S Q, PAN C Y. Probability and Statistics[M]. 4th edition. Beijing: Higher Education Press,2008:382.)
[9]解文華,易本順,肖進勝,等.基于像素與子塊的背景建模級聯算法[J].通信學報,2013,34(4):194-200.(XIE W H, YI B S, XIAO J S, et al. Cascaded algorithm for background modeling using pixelbased and blockbased methods[J]. Journal on Communications, 2013,34(4):194-200.)
[10]GUO J M, LIU Y F, HSIA C H, et al. Hierarchical method for foreground detection using codebook model[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2011, 21(6):804-815.
[11]李剛,曾銳利,林凌,等.基于幀間顏色梯度的背景建模[J].光學精密工程,2007,15(8):1257-1262. (LI G, ZENG R L, LIN L, et al. A novel background modeling method based on color grade of different frames[J]. Optics and Precision Engineering, 2007, 15(8):1257-1262.)
[12]SAID A, PEARLMAN W A. A new, fast, and efficient image codec based on set partitioning in hierarchical trees[J]. IEEE Transactions on Circuits and Systems for Video Technology, 1996, 6(3): 243-250.
[13]劉培,王建英,尹忠科.利用線性預測去除圖像椒鹽噪聲[J].鐵道學報,2007,29(6):48-51.(LIU P, WANG J Y, YIN Z K. Removal of saltandpepper noises from images by linear prediction[J]. Journal of the China Railway Society, 2007,29(6):48-51.)