基于單軸連續旋轉調制的方位對準技術
2016-05-18 09:18:32趙曉偉白煥旭鄧志寶
導彈與航天運載技術 2016年1期
趙曉偉,李 江,黨 寧,白煥旭,鄧志寶
(1. 北京航天發射技術研究所,北京,100076;2. 中國兵器工業集團202研究所,西安,712000)
基于單軸連續旋轉調制的方位對準技術
趙曉偉1,李 江2,黨 寧2,白煥旭1,鄧志寶1
(1. 北京航天發射技術研究所,北京,100076;2. 中國兵器工業集團202研究所,西安,712000)
捷聯慣組冷態啟動、環境溫度變化、長時間未標定都可能使陀螺常值漂移發生變化,進而影響捷聯慣組的方位對準精度。為減小陀螺常值漂移對方位對準精度的影響,進行基于單軸連續旋轉調制的方位對準技術研究。通過理論分析可知,轉臺單軸連續旋轉條件下,將陀螺常值漂移周期性調制,陀螺常值漂移對方位對準精度影響較小,轉臺轉速越高,對準時間越長,方位對準收斂振蕩幅值越小,收斂速度越快。通過算法仿真和試驗驗證了理論分析的正確性。
單軸連續旋轉;方位對準;陀螺常值漂移
0 引 言
定位瞄準系統作為武器系統的重要單元,為武器系統提供高精度的射前初始方位角和行進過程中的實時位置信息。捷聯慣組作為定位瞄準系統的核心組成部分,其方位對準精度直接決定定位瞄準系統的瞄準精度。一般來說,捷聯慣組的方位對準精度受陀螺常值漂移的影響,捷聯慣組冷態啟動、環境溫度變化、長時間未標定都可能使陀螺常值漂移發生變化,進而影響捷聯慣組的方位對準精度。為解決上述問題,可對捷聯慣組增加轉位機構,采用單軸連續旋轉的方式對陀螺常值漂移進行周期性調制,進而提高捷聯慣組的方位對準精度。文獻[1]在羅經法對準頻率特性分析的基礎上提出一種適于旋轉調制捷聯慣導系統的羅經對準方法;文獻[2]針對光纖捷聯慣組在單軸連續旋轉條件下進行了方位對準研究,但沒有研究單軸連續旋轉條件下轉速和對準時間對方位對準精度的影響。本文研究了激光捷聯慣組在單軸連續旋轉條件下陀螺常值零偏、轉臺轉速和對準時間對方位對準精度的影響,并進行了仿真和實驗驗證。
1 理論分析
1.1 捷聯慣組方位對準誤差模型
在東北天坐標系下對方位對準誤差模型進行推導。
靜態條件下,用矢量形式表示陀螺測出的關于IMU坐標系中x,y,z軸的角速率,其量值為地球角速率在每個坐標軸上的分量與陀螺零偏之和,如式(1)所示。

式中 δα,δβ,δγ分別為關于地理坐標系的東向、北向和垂直向的失準;L為當地地理緯度;Ω為地球自轉角速度;xd,yd,zd分別為等效東向、北向和天向陀螺零偏。
方位對準過程可以理解為將測量的角速率東向軸分量調零的過程,即:


式中 δγ為方位角誤差;xB為等效東向加速度計零偏。
1.2 單軸連續旋轉狀態下方位對準誤差分析
在單軸連續旋轉過程中,假設IMU坐標系p與旋轉坐標系r重合[3],xε,yε,zε分別為x,y,z軸3只陀螺的常值漂移;e1ε為3只陀螺常值漂移引起的等效東向陀螺常值漂移。轉臺繞方位軸以角速率ω進行連續旋轉,旋轉時間為t。3只陀螺常值漂移的等效東向陀螺常值漂移為
3只陀螺常值漂移引起的方位對準誤差為

由式(5)可知,單軸連續旋轉條件下,方位對準精度與水平陀螺精度、轉臺旋轉速度、初始對準時間和工作地理緯度有關。水平方向陀螺精度越高,轉臺旋轉速度越快,地理緯度越低,方位對準誤差衰減振蕩幅值越小,方位對準精度越高;且方位對準時間越長,方位對準精度越高。
1.3 單軸連續旋轉狀態下方位對準算法設計
1.3.1 濾波模型的建立
在捷聯慣組方位對準過程中,為使捷聯慣組的誤差方程[4~6]適合卡爾曼濾波模型,將水平加速度計常值漂移和3只陀螺常值漂移擴充為狀態變量。此時捷聯慣組的狀態方程可以寫成如下形式:

其中,

式中 δα,δβ,δγ為姿態誤差角;evδ,Nvδ分別為東向、北向速度誤差;xε,yε,zε分別為IMU 3個方向的陀螺常值漂移;x?,y?為IMU水平方向的加速度計常值漂移。
以速度誤差作為觀測量,設捷聯慣組的量測信息為

式中IeIN,vv為捷聯慣組解算速度;ReRN,vv為載體真實的速度;eN,vvδδ為速度誤差。則,觀測方程為

1.3.2 濾波算法
使用Kalman濾波器[7,8]實現方位對準的過程為估計濾波初值的過程。離散狀態變量空間表達式如下:

式中 wk,wvk為離散化的零均值白噪聲;Φk+1,k為狀態轉移矩陣;Hk+1為觀測矩陣;Qk,Rk分別為wk,wvk的協方差陣。
遞推Kalman濾波器包含時間更新過程和測量更新過程如下:
時間更新過程:

測量更新過程:
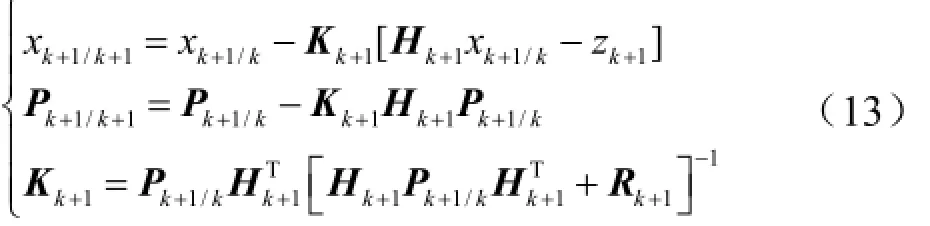
式中1k+K為卡爾曼濾波增益矩陣;1/kk+P為誤差協方差矩陣。
每個濾波周期內應用式(12)、式(13)可估計出濾波初值,實現捷聯慣組方位對準。
2 單軸連續旋轉調制初始對準的仿真與分析
采用MaTLaB對基于單軸連續旋轉調制的初始對準算法進行仿真。仿真算法主要由數據源、軌跡發生器、慣性組件誤差、對準算法、結果比較5部分組成,圖1為基于單軸連續旋轉調制的初始對準仿真示意。
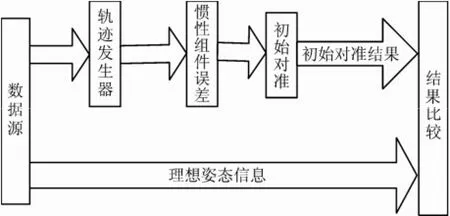
圖1 基于單軸連續旋轉調制的初始對準仿真示意
a)數據源模塊:設定IMU的初始姿態、初始速度、初始位置、IMU轉速、轉動方案。
b)軌跡發生器模塊:根據數據源提供的導航信息,解算IMU坐標系下投影的角速度pipω和比力pipf。該模塊是慣性導航解算的逆運算過程,模擬陀螺和加速度計的輸出。
c)慣性組件誤差模塊:根據陀螺和加速度計的誤差模型,設置慣性元件的常值漂移、標度因數誤差、三軸不正交安裝誤差、隨機噪聲誤差等誤差項。
d)對準算法模塊:設計基于單軸連續旋轉調制的Kalman濾波精對準算法。
e)結果比較模塊:將理想的載體橫滾、俯仰、方位信息與初始對準得到的橫滾、俯仰、方位信息比較分析。
假設捷聯慣組完成粗對準后,初始姿態角誤差為[10′,10′,5°],初始速度誤差為[0.01,0.01,0.01] m/s,初始位置誤差為[10,10,10] m。轉臺單軸連續旋轉條件下,分別設置不同的陀螺常值漂移、不同的對準時間、不同的轉速,分析單一變量對方位對準精度的影響。
2.1 陀螺常值漂移對方位對準精度的影響
假設轉臺轉速為3 (°)/s,旋轉時間為10 min;初始姿態角(俯仰角、橫滾角、方位角)均為0°;初始速度(東向、北向、天向)均為0 m/s;初始位置經度為116.4°e、緯度為39.8°N、高度為60 m。
在上述假設條件下,仿真比較水平陀螺常值漂移均為0.01 (°)/h和水平陀螺常值漂移均為0.05 (°)/h的10 min情況下的方位對準誤差,仿真結果如圖2所示。
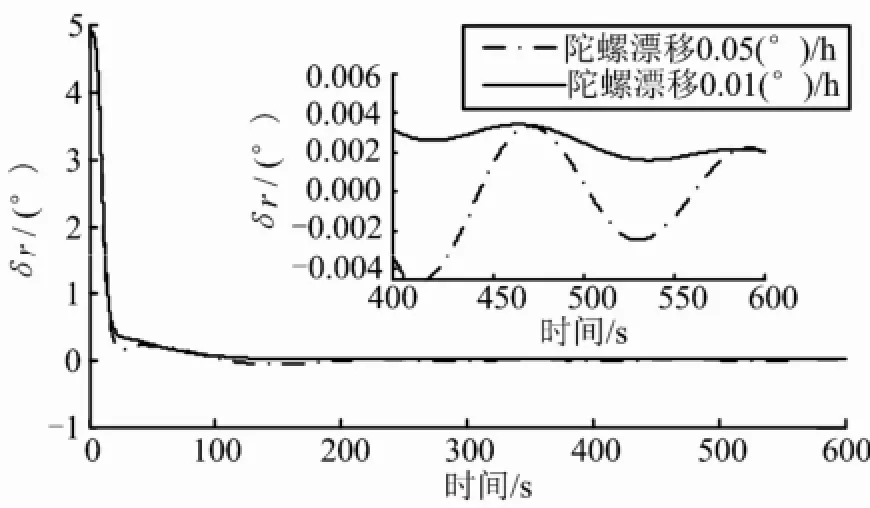
圖2 水平陀螺不同常值漂移對方位對準誤差影響
由圖2可知,不同陀螺常值漂移條件下10 min方位對準誤差均小于0.01°。陀螺常值漂移在轉臺單軸連續旋轉條件下不影響方位對準精度。
2.2 對準時間對方位對準精度的影響
假設轉臺轉速為3 (°)/s,旋轉時間為20 min;初始姿態角(俯仰角、橫滾角、方位角)均為0°;初始速度(東向、北向、天向)均為0 m/s;初始位置經度為116.4°e、緯度為39.8°N、高度為60 m。
模擬實際工況添加慣性組件誤差。設置3只陀螺常值漂移均為0.003 (°)/h;3只陀螺隨機游走均為0.000 3(°)/;3只加速度計常值漂移均為20 μg;3只加速度計隨機游走均為2μg/h;三軸陀螺不正交安裝誤差均為1″;三軸加速度計不正交安裝誤差均為5″;3只陀螺和3只加速度計標度因數誤差均為1×10-6。
方位對準誤差仿真結果如圖3所示。
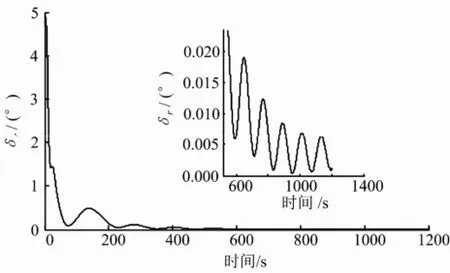
圖3 3 (°)/s連續旋轉20 min方位對準誤差收斂曲線
由圖3可知,方位對準在600 s時,方位對準誤差為0.006°,在600 s附近,方位對準誤差振蕩區間為[0.005 9°~0.019°];方位對準在1 200 s時,方位對準誤差為0.001°,在1 200 s附近,振蕩區間為[0.006°~0.001°];仿真結果表明延長對準時間有利于提高方位對準精度。
2.3 不同轉速條件對方位對準精度的影響
假設轉臺轉速分別為3 (°)/s、9 (°)/s、18 (°)/s,旋轉時間為10 min,初始姿態角(俯仰角、橫滾角、方位角)均為0°;初始速度(東向、北向、天向)均為0 m/s;初始位置經度為116.4°、緯度為39.8°N、高度為60 m。
模擬實際工況,添加慣性組件誤差。添加誤差同第2.2節。不同轉速條件下方位對準誤差仿真結果如圖4所示。
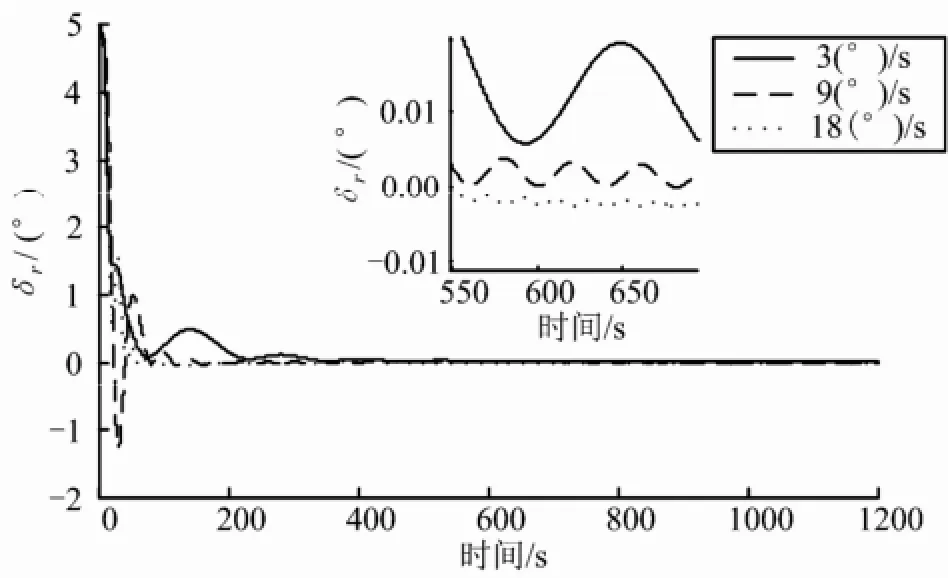
圖4 不同轉速對方位對準誤差的影響
由圖4可知,選取對準時間為10 min,3 (°)/s連續旋轉對準誤差振蕩區間在[0.006°,0.019°];9 (°)/s連續旋轉對準誤差振蕩區間在[-0.002°,0.003°];18 (°)/s連續旋轉對準誤差振蕩區間在[-0.002°,0.001°]。仿真結果表明:相同的對準時間,轉臺轉速越高,方位對準精度越高,衰減振蕩幅值越小。
3 試驗驗證
在北京(緯度L=39.8°N)、常溫(20 ℃)、 實驗室(隔離地基)環境條件下進行試驗。采用1臺6個月未標定的IMU,將IMU固定在高精度三軸轉臺上,對基于單軸連續旋轉調制的初始對準技術進行試驗驗證。經百秒平滑測試,3只陀螺的零偏穩定性精度分別為0.002 3 (°)/h(1σ)、0.002 6 (°)/h (1σ)和0.002 3 (°)/h(1σ),3只加速度計的零偏穩定性精度分別為9.58 μg(1σ)、15.53 μg(1σ)和13.71 μg(1σ)。對IMU進行純捷聯靜態10 min初始對準精度測試,初始對準結果如表1所示。
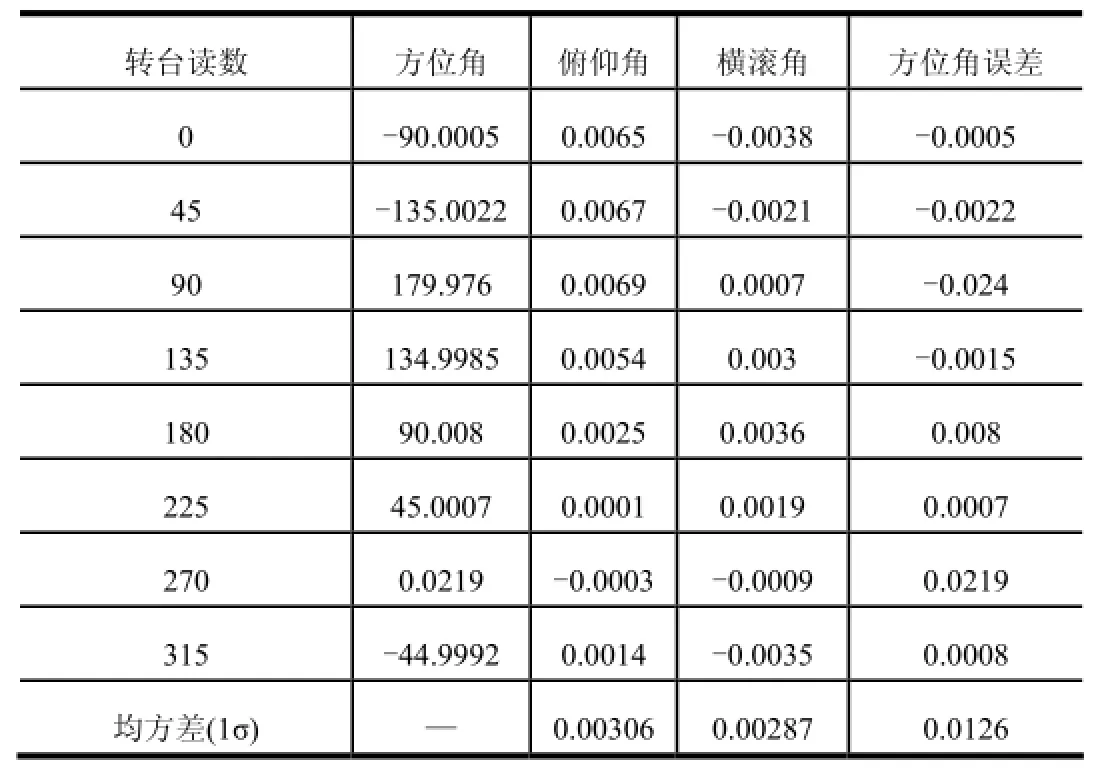
表1 IMU水平全方位對準結果 單位:(°)
由表1可知,10 min水平全方位對準,方位角對準誤差為0.012 6°(45.36″)(1σ);俯仰角對準誤差為0.003 06°(11.02″)(1σ);橫滾角對準誤差為0.002 87°(10.35″)(1σ)。
3.1 3 (°)/s單軸連續旋轉條件下全方位對準結果
測試過程中,以轉臺內框、中框、外框讀數分別為IMU橫滾角、俯仰角、方位角的基準。試驗結果如表2~4所示。
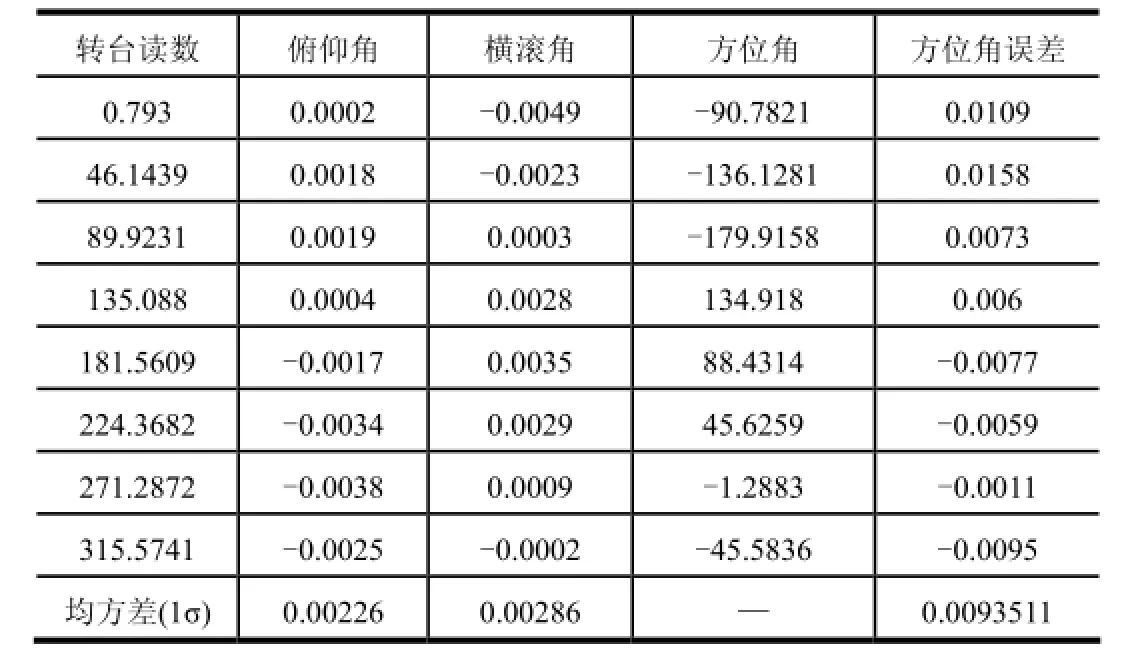
表2 3(°)/s連續旋轉10 min水平全方位對準結果 單位:(°)
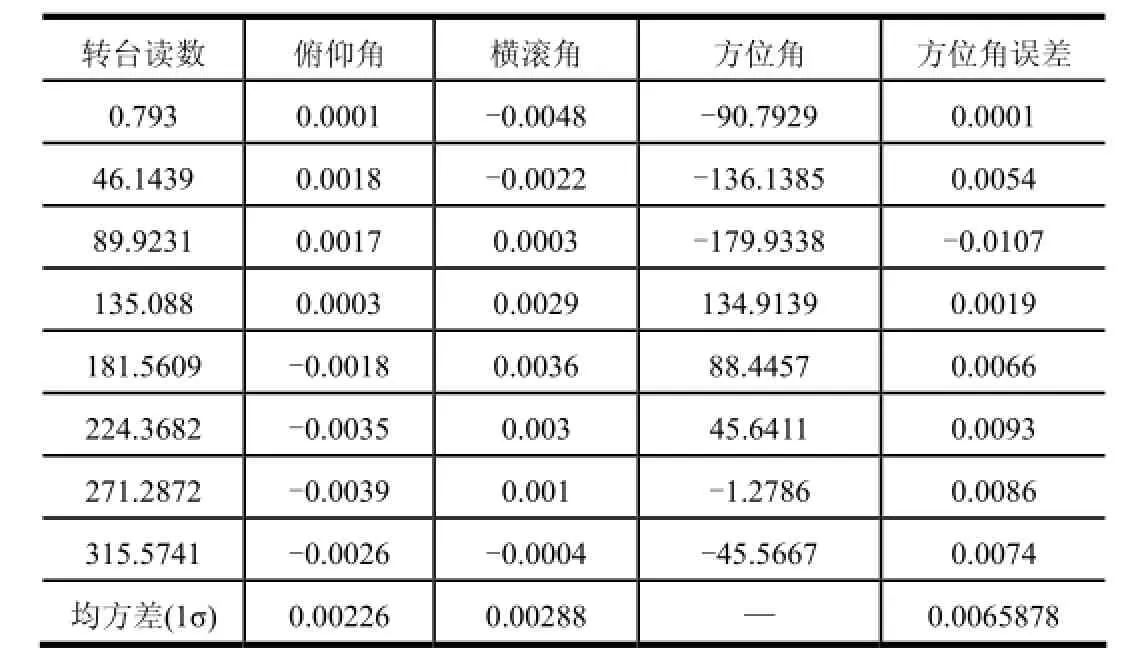
表3 3 (°)/s連續旋轉15 min水平全方位對準結果 單位:(°)
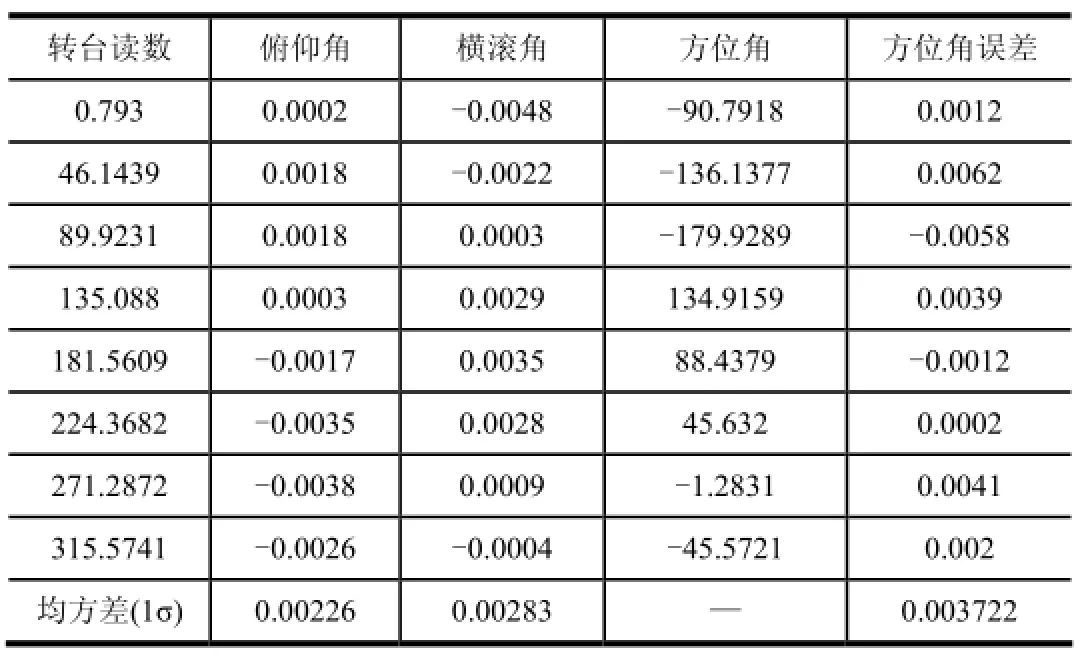
表4 3 (°)/s連續旋轉20 min水平全方位對準結果 單位:(°)
由表2~4可知,轉臺以3 (°)/s連續旋轉,當對準時間為10 min,水平全方位對準精度為0.009 4°(33.48″)(1σ)。當對準時間為15 min,水平全方位對準精度為0.006 6°(23.76″)(1σ)。當對準時間為20 min,水平全方位對準精度為0.003 7°(13.32″)(1σ)。隨著初始對準時間的延長,方位對準精度將提高。
3.2 10 (°)/s單軸連續旋轉條件下全方位對準結果
理論上延長對準時間和提高轉速都有利于對準精度的提高,當轉臺轉速為3 (°)/s,對準時間為20 min,水平全方位對準精度為13.32″(1σ)。通過提高轉速,期望在更短時間內達到同樣的全方位對準精度。
采集了8組以10 (°)/s單軸連續旋轉的陀螺和加速度計的有效原始數據,進行離線試驗。試驗結果如表5~7所示。
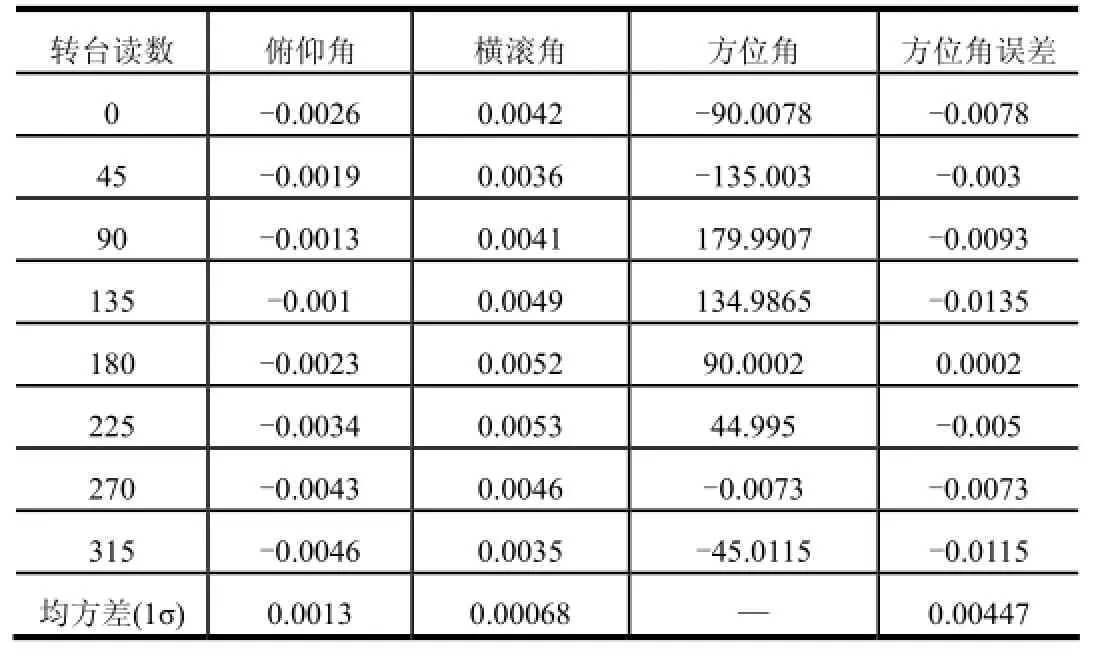
表5 10 (°)/s連續旋轉10 min水平全方位對準結果 單位:(°)
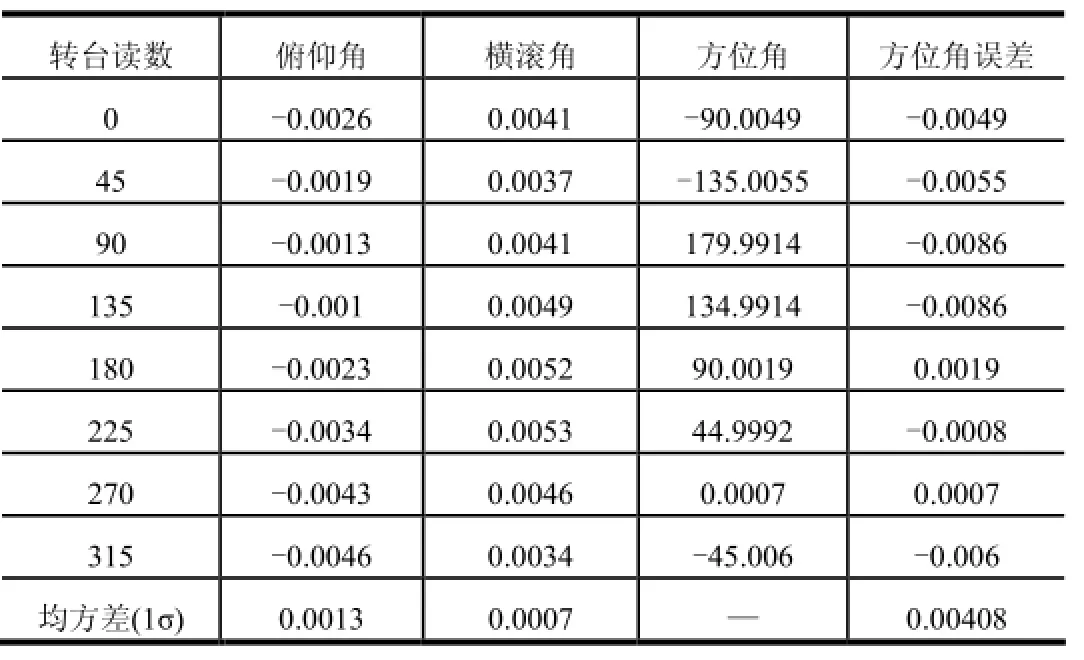
表6 10 (°)/s連續旋轉15 min水平全方位對準結果 單位:(°)

表7 10 (°)/s連續旋轉20 min水平全方位對準結果 單位:(°)
由表5~7比較可知,轉臺以10 (°)/s連續旋轉,當對準時間為10 min時,方位對準精度為0.004 47°(16.09″)(1σ);當對準時間為15 min時,方位對準精度為0.004 08°(14.65″)(1σ);當對準時間為20 min時,方位對準精度為0.003 3°(12″)(1σ)。轉臺單軸連續旋轉條件下初始對準,初始對準時間越長,方位對準精度越高。
3.3 不同對準時間、不同轉速條件下方位對準精度
通過上述試驗得到的初始對準結果,比較不同對準時間、不同轉速方位對準結果,如表8所示。

表8 不同對準時間、不同轉速方位對準結果
由表8可知,相同的轉速,對準時間越長,方位對準精度越高。相同的對準時間,轉臺轉速為10 (°)/s的方位對準精度比轉臺轉速為3 (°)/s的方位對準精度高。但達到20 min時,不同轉速條件下方位對準精度相差不大。
4 結 論
在單軸連續旋轉條件下,能夠將陀螺常值漂移周期性調制,由冷態啟動、長時間未標定、環境溫度變化引起的陀螺常值漂移不影響方位對準精度。且轉臺轉速越高,初始對準時間越長,全方位對準精度越高。通過算法仿真和試驗表明理論分析的正確性和算法的有效性。
[1] 郝燕玲, 張義, 孫楓, 高偉. 單軸旋轉式捷聯慣導方位對準研究[J]. 儀器儀表學報, 2011, 32(02): 71-77.
[2] 汪滔, 吳文啟, 曹聚亮, 郭勇剛. 基于轉動的光纖陀螺捷聯系統初始對準研究[J]. 壓電與聲光, 2007, 29(05): 24-27.
[3] 趙曉偉, 孫謙, 陳鴻躍. 單軸旋轉捷聯慣導系統初始對準誤差分析[J].導彈與航天運載技術, 2014(4): 58-62.
[4] 張天光, 王秀萍, 王麗霞. 捷聯慣性導航技術(第2版)[M]. 北京: 國防工業出版社, 2010.
[5] 查峰, 許江寧, 黃寨華, 覃方君. 單軸旋轉慣導系統旋轉性誤差分析及補償[J]. 中國慣性技術學報, 2012, 20(1): 11~17
[6] 袁保倫, 韓松來, 楊建強, 廖丹. 激光陀螺單軸旋轉式慣導系統的轉動方案分析[J]. 中國慣性技術學報, 2011, 19(2): 145-151.
[7] 龍興武, 于旭東, 張鵬飛, 等. 激光陀螺單軸旋轉慣性導航系統[J]. 中國慣性技術學報, 2010, 18(2): 149-153.
[8] Levinson e, Majure R. accuracy enhancement techniques applied to the marine ring laser inertial navigator(MaRLIN)[J]. Navigation: Journal of the Institute of Navigation, 1987, 34(1): 64-86.
.
Research on Azimuth Alignment Technology Based on the Single Axis Continuous Rotation Modulation
Zhao Xiao-wei, Li Jiang, dang Ning, Bai Huan-xu, deng Zhi-bao
(1. Beijing Institute of Space Launch Technology, Beijing, 100076; 2. No.202 Institute of china Ordnance Industry Group, Xi’an, 712000)
The gyro constant drift was changed by the strapdown inertial measure unit(SIMU)cold start, the change of environmental temperature and uncalibrated for a long time which would also effected the azimuth alignment precision of SIMU. In order to reduce the influence of gyro constant drift to the azimuth alignment precision, the azimuth alignment technology based on the single axis continuous rotation modulation was researched. according to the theory analysis, the gyro constant drift can be periodic modulated under the condition of continuous rotation, so the accuracy of azimuth alignment will be less affected by the gyro constant drift. The higher the rotate speed of turntable was, the longer the alignment time would be, the azimuth alignment convergence oscillation amplitude was smaller and the rate of convergence was faster. The correctness of theoretical analysis was verified through the results of algorithm simulation and test.
Single-axis continuous rotation; alignment of azimuth; Gyro constant drift
V249.3
a
1004-7182(2016)01-0026-06
10.7654/j.issn.1004-7182.20160107
2014-06-03;
2014-07-20
趙曉偉(1988-),男,助理工程師,主要研究方向為航天發射系統慣性導航技術