即插即用式光纖陀螺/全站儀組合儀器常數標定方法
2016-05-19 01:34:15于先文
中國慣性技術學報 2016年1期
關鍵詞:全站儀
于先文,王 宇,王 慶
(1.東南大學 交通學院,南京 210096;2.南京理工大學機械工程學院,南京 210094;3.東南大學 儀器科學與工程學院,南京 210096)
即插即用式光纖陀螺/全站儀組合儀器常數標定方法
于先文1,王 宇2,王 慶3
(1.東南大學 交通學院,南京 210096;2.南京理工大學機械工程學院,南京 210094;3.東南大學 儀器科學與工程學院,南京 210096)
儀器常數標定是即插即用式光纖陀螺/全站儀組合定向技術的一個重要環節,其目的是標定出光纖陀螺敏感軸與全站儀水平度盤面平行時全站儀豎盤的讀數。將全站儀與測試轉臺固連,并使全站儀豎軸與轉臺豎軸平行。利用測試轉臺的定速轉動功能,在光纖陀螺敏感軸近似水平情況下,使轉臺帶動光纖陀螺/全站儀組合裝置分別做順時針、逆時針定速轉動,并每周采集陀螺輸出數據偶數次。導出了計算光纖陀螺敏感軸與全站儀水平度盤面間夾角的公式,進而得到光纖陀螺敏感軸水平時的全站儀豎盤讀數,并以此作為儀器常數。理論分析和實驗測試均表明,利用市場上常見的測試轉臺,該參數標定精度可達5″以內。
光纖陀螺;全站儀;儀器常數標定;測試轉臺
隨著GPS定位技術在測量中的普及應用,日常測量工作對單點情況下完成全站儀(Total Station,TS)角秒級定向的需求越來越迫切。現有的陀螺經緯儀、陀螺全站儀雖能滿足上述要求,但由于設備笨重且價格昂貴、儀器常數標定和定向的操作過程較為復雜[1-2]、現有全站儀沒有得到充分利用等原因,使得其難以在普通測繪工作中推廣應用。
鑒于光纖陀螺(Fiber Optic Gyroscope,FOG)具有結構全固態、價格低廉、啟動時間短等優點[3-5],文獻[6]提出了一種具有安裝誤差抵償功能的光纖陀螺/全站儀組合定向方法。該方法具有作業現場不需進行常數標定優點,然而該方法對設備的組裝精度要求較高,系統誤差殘余較大。文獻[7]在此基礎上進一步改進,提出一種背負式光纖陀螺/全站儀組合定向方法,該方法對組裝精度要求很低,作業現場不需進行常數標定,可即插即用,并可幾乎完全消除系統誤差對定向的影響。但該方法需要在儀器出廠時,標定出光纖陀螺軸與全站儀水平度盤平行時的全站儀豎盤讀數β[7]。
對含有光纖陀螺的 IMU(Inertial Measurement Unit)安裝誤差角的標定已有較多研究[8],利用轉臺提供已知角速度實現標定是最為常用的方法[9]。然而,現有標定方法并不適用于單陀螺與全站儀水平度盤面間夾角的快速高精度測定,需針對全站儀望遠鏡可帶光纖陀螺旋轉及全站儀豎盤可提供精確讀數的特點,設計出一種簡便方法,快速、準確地標定出光纖陀螺敏感軸與全站儀水平度盤平行時的全站儀豎盤讀數β。
測試轉臺是標定慣性元器件安裝誤差的常用設備,有單軸、雙軸、三軸等類型,業界對于測試轉臺的性能及誤差控制也已有較深入的研究和掌握[9-10]。本文將利用轉臺的定速旋轉功能,通過順時針、逆時針雙向旋轉,獲得光纖陀螺在兩種狀態下的讀數,通過導出的公式算得光纖陀螺敏感軸與全站儀水平度盤平行時的全站儀豎盤讀數β,并以此作為儀器常數。
1 標定方法
1.1 組合裝置結構
如圖1,在全站儀望遠鏡一側加工一個鎖緊裝置,使光纖陀螺與全站儀望遠鏡間可以方便地實現安裝和卸載。光纖陀螺安裝到望遠鏡上后,光纖陀螺軸應盡量垂直于全站儀橫軸,光纖陀螺可隨望遠鏡自由做180°豎直方向轉動。
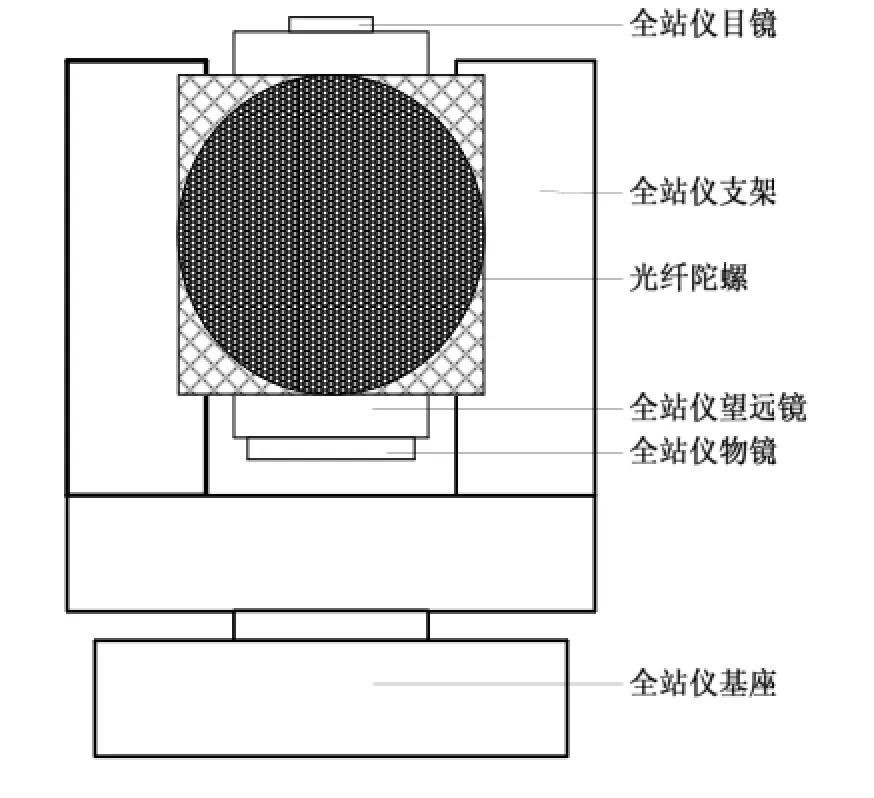
圖1 組合裝置構造示意圖Fig.1 Composite set structure of total station
1.2 標定過程
如圖 2,將測試轉臺置平,將全站儀通過連接螺栓安置到轉臺上,并通過全站儀腳螺栓使得全站儀豎軸與轉臺旋轉軸平行。將光纖陀螺通過鎖緊裝置安插到全站儀上,通過全站儀望遠鏡轉動將光纖陀螺敏感軸近似放水平,并記錄下此時全站儀豎盤讀數β′。
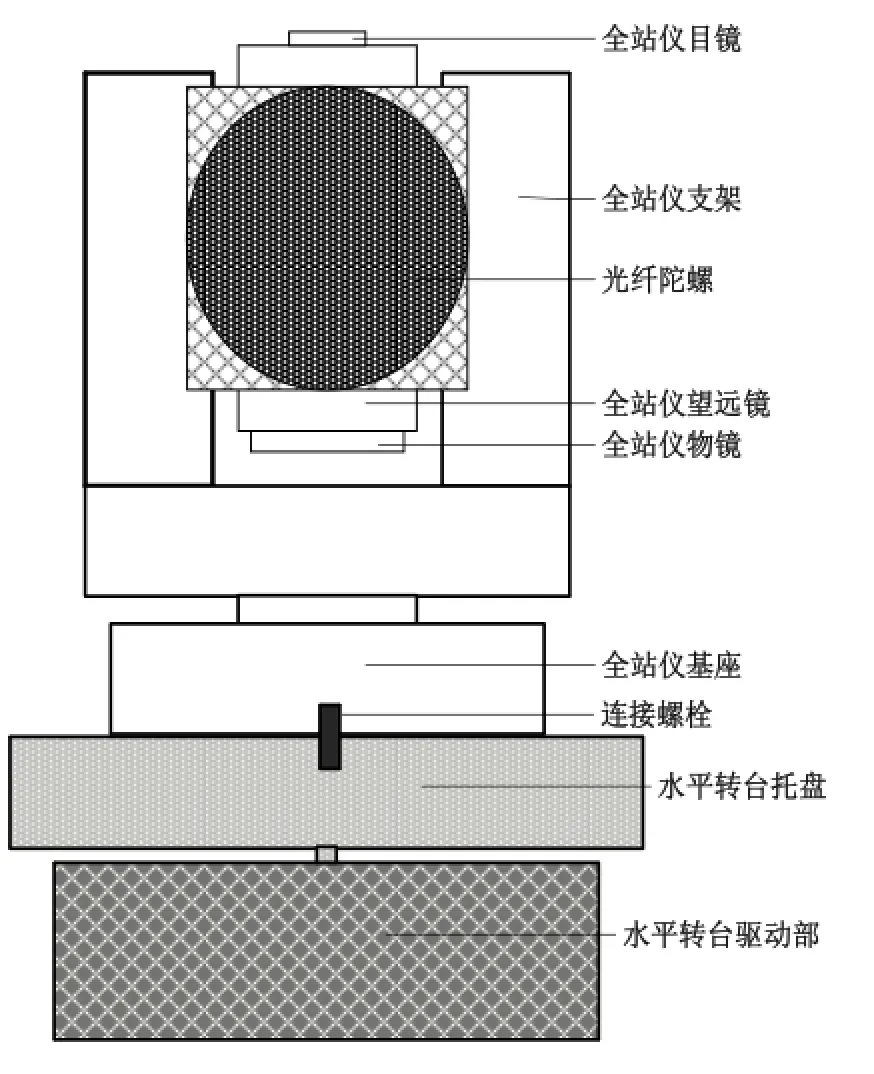
圖2 標定安裝示意圖Fig.2 Calibration installation of total station
先讓測試轉臺帶動光纖陀螺/全站儀組合裝置順時針勻速旋轉,采集器均勻記錄光纖陀螺輸出值,每周記錄2n次(n為自然數),共記錄m周。順時針旋轉結束后,先使水平轉臺暫停數秒鐘后,然后再讓測試轉臺帶動光纖陀螺/全站儀組合裝置逆時針勻速旋轉,采集器均勻記錄光纖陀螺輸出值,每周記錄 2n次,共記錄 m周。利用這些陀螺輸出值計算光纖陀螺敏感軸與全站儀水平度盤間的夾角v,于是可得光纖陀螺敏感軸水平時全站儀豎盤讀數β。

或

式(1)(2)的選用取決于全站儀豎盤刻度增量方向的設置以及標定時全站儀望遠鏡物鏡向空或向地的方向。實際操作過程中,可采用下述方法判斷:轉動全站儀望遠鏡,光纖陀螺敏感軸由仰角向水平方向變化,當全站儀豎盤讀數在增加時選擇式(1),否則選擇式(2)。
1.3 標定解算
圖3為安裝后各主要軸系關系,轉臺旋轉軸QT與地球自轉軸夾角為 90°-B;QF為光纖陀螺敏感軸;QK為QF在全站儀水平度盤面垂直投影,v為QF與QK間的夾角,QK與北向QN夾角為α。
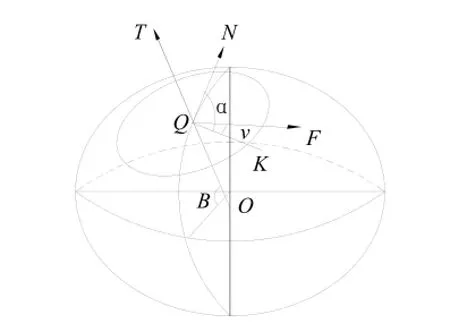
圖3 東向位置主要軸系圖Fig.3 Main axes in the east position
于是靜止狀態下,光纖陀螺輸出的角速度為

式中:0ω為光纖陀螺輸出量,ω為理論量, ωΔ 為光纖陀螺零偏,ieω 為地球自轉角速度。
轉臺以角速度cω順時針勻速帶動全站儀旋轉時,第i次記錄的光纖陀螺輸出量為

式中:順時針旋轉時cω前符號,在北半球為負號,在南半球為正號。
同理,其180°對稱位置上輸出量為

式(4)、式(5)相加可得:

采集m周數據,所有光纖陀螺輸出值相加,可得:

轉臺以角速度aω逆時針勻速帶動全站儀旋轉。則第i次記錄的光纖陀螺輸出量為

同理可得,逆時針旋轉時記錄m周數據,所有光纖陀螺輸出值相加,可得:

式(9)減去式(7)可得:

整理可得:

從上式可以看出,該標定方法消除了光纖陀螺零偏的影響;光纖陀螺軸與水平面間夾角v的確定取決于光纖陀螺輸出值、采樣次數、水平轉臺角速度cω和aω。
2 標定誤差分析
由于光纖陀螺輸出值的隨機誤差,以及轉臺旋轉角速度誤差的影響,使得夾角v的標定結果存在誤差。
對式(11)兩邊進行微分可得:

光纖陀螺的零偏穩定性Fm 一般是指10 s測量值的平滑結果精度。設光纖陀螺的輸出頻率為100 Hz,則有:

利用誤差傳播定律可得:
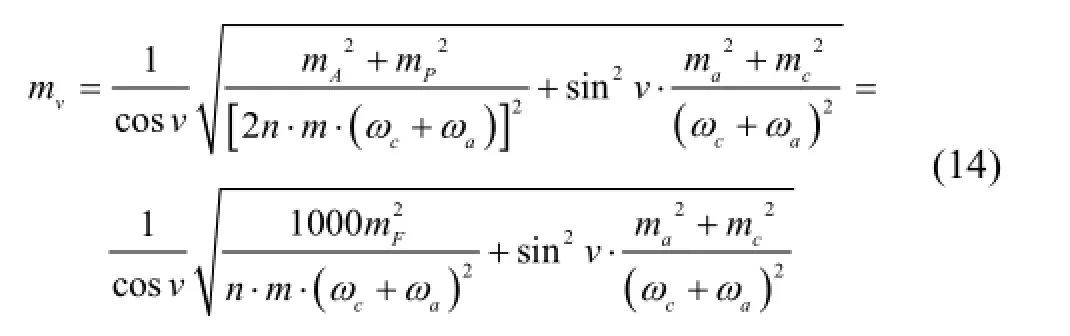

分析式(15)可以看出,vm是夾角v、陀螺零偏穩定性Fm 、轉臺角速率相對精度的增函數,是單向旋轉數據采集次數2n m·、轉臺旋轉角速率cω的減函數。
在標定時,盡量將光纖陀螺敏感軸放置水平,一般可將夾角v控制在10°以內。目前,低速測試轉臺旋轉角速率cω一般在0.01~300 (°)/s內可調,角速率相對精度一般為(10~100)×10-6。根據文獻[7],所采用光纖陀螺零偏穩定性一般優于0.05 (°)/h。
下面討論cω、v、2n m·的變化對vm的影響規律。
首先討論在測試轉臺不同轉速情況下,數據采集次數對交角v標定精度的影響規律。取v=10°,Fm =0.05 (°)/h,在測試轉臺旋轉角速率分別為10 (°)/s、30 (°)/s、120 (°)/s時,數據記錄數量變化對交角v的標定精度影響規律如圖4所示。
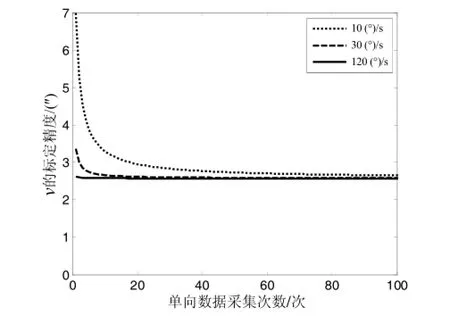
圖4 數據記錄量對夾角v標定精度的影響Fig.4 Influence of data quantity on calibration precision
由圖 4可見,當單向數據記錄數量次數超過 40個時,v的標定精度已不再有明顯提高。但考慮到光纖陀螺輸出頻率一般不會小于100 Hz、轉臺旋轉一周需數秒鐘,故單向旋轉實際數據記錄次數至少在數百次以上。進而可知,實際工作中,不用考慮數據記錄次數對標定精度的影響。
再討論在測試轉臺不同轉速、交角v不同情況下,交角v標定精度變化規律。取v=10°、Fm =0.05 (°)/h、=100×10-6,單向旋轉數據記錄次數2n m·=300,測試轉臺旋轉角速率分別取10 (°)/s、30 (°)/s、120 (°)/s,交角v的標定精度隨交角v變化而變化的規律如圖 5所示。
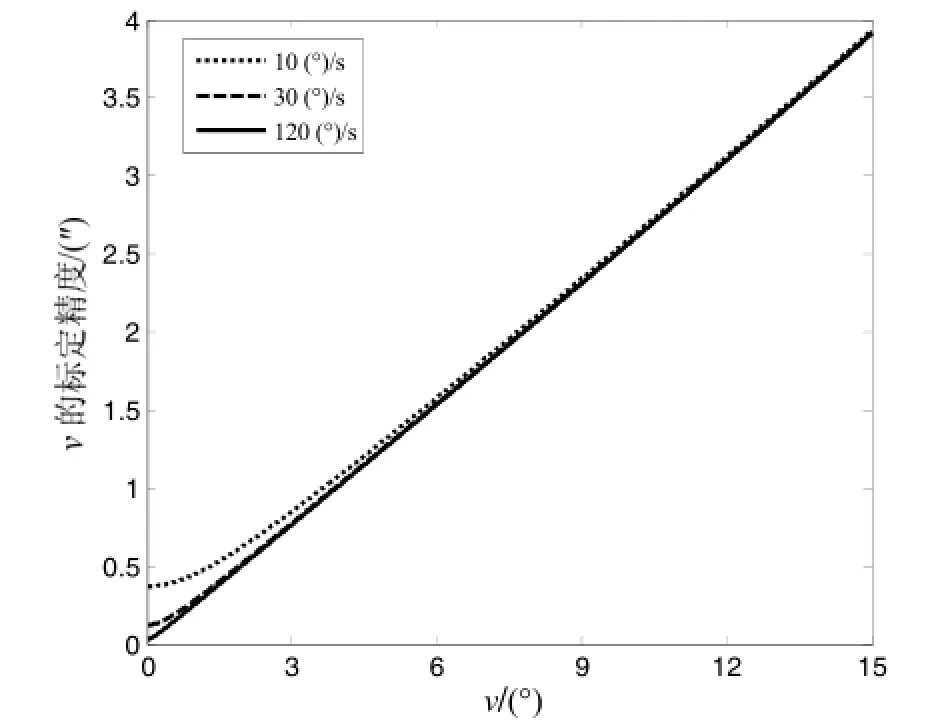
圖5 夾角v對標定精度的影響Fig.5 Influence of included angle on calibration precision
由圖5可見,夾角v對其本身標定精度的影響近乎呈線性遞增,夾角v越大,標定精度越差。因此,標定時應盡可能使光纖陀螺敏感軸與全站儀水平度盤面平行。結合圖4、圖5可見,轉臺旋轉角速率在大于10 (°)/s情況下,轉臺角速率的大小對標定的精度影響極小。
最后討論v的標定精度受測試轉臺旋轉角速率相對精度和v值的綜合影響情況。取單向旋轉數據記錄次數2n m· =300、Fm =0.05 (°)/h、轉臺旋轉角速度cω=30 (°)/s,在交角v和轉臺旋轉角速率相對精度變化情況,得到相應的標定精度等值曲線,如圖6所示。
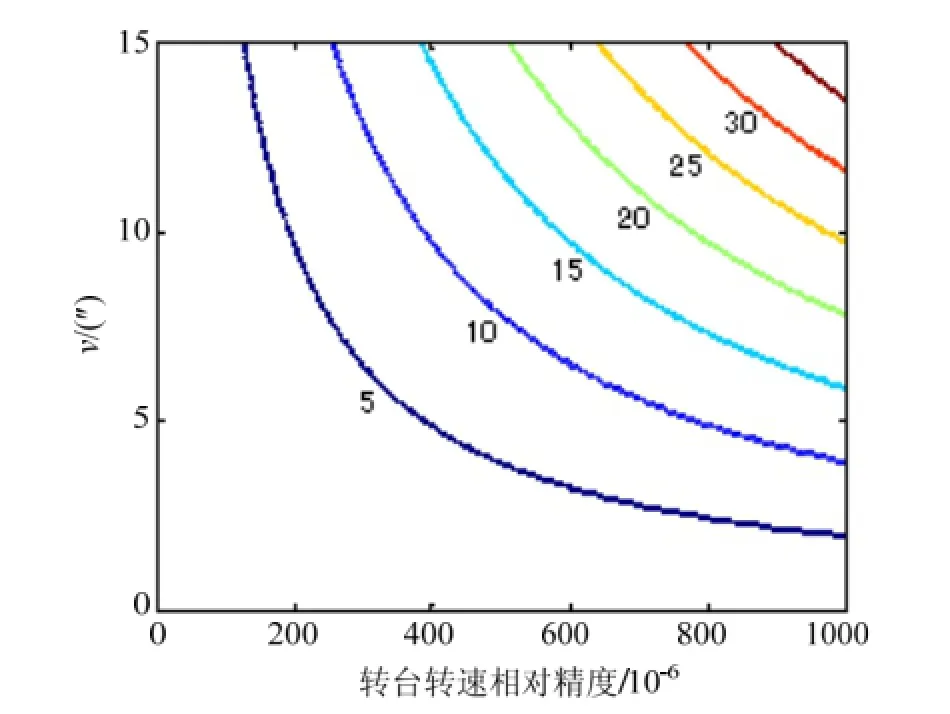
圖6 轉臺相對精度和夾角v對標定精度的共同影響Fig.6 Influence on calibration precision byand
由圖6可見,轉臺轉速相對精度和夾角v對標定精度影響均比較顯著。當所用轉臺轉速相對精度較差(如達到 1×10-3)時,可采用兩次標定法來提高標定精度。即先標定一次,根據式(1)(11)算得β,然后通過全站儀豎直微動將全站儀望遠鏡轉到豎盤讀數為β的位置;再做第二次標定,根據式(1)(11)再次算得β。根據圖6可知,此時β的標定精度可達到5″以內。
3 實驗驗證
試制出的即插即用式光纖陀螺/全站儀組合設備的儀器常數標定實驗在 SMT-I型三軸模擬轉臺上進行。該轉臺內框、中框、外框的角速率范圍0.001~400 (°)/s,速率精度0.005 (°)/s(360o平均);角速率不小于10 (°)/s時,角速率相對精度優于100×10-6。光纖陀螺/全站儀組合樣機所使用光纖陀螺的輸出頻率為100 Hz、零偏穩定性為0.05 (°)/h。
實驗過程如下:
第1步:通過轉臺控制系統將轉臺中框和內框均放置水平;通過螺栓將全站儀基座與測試轉臺內框平臺固連,并通過旋轉全站儀腳螺旋,利用全站儀水準器,使得全站儀豎軸與測試轉臺外框旋轉軸平行,如圖7。
第2步:通過全站儀望遠鏡將光纖陀螺敏感軸盡量放水平,然后全站儀豎直制動。此時全站儀豎盤讀數為164°31′48″。

圖7 參數標定實驗Fig.7 Experiment for calibrating the constant
首先,使轉臺以120 (°)/s的角速度順時針旋轉,在平穩轉動情況下,記錄光纖陀螺輸出值1200次,取平均;然后再使轉臺以120 (°)/s的角速度逆時針旋轉,在平穩轉動情況下,記錄光纖陀螺輸出值1200次,取平均。
利用式(11)算得夾角v。重復測試過程20次,測得的交角v如表1所示。
經統計計算得交角v平均值為23761″,中誤差為4.8″,精度和理論分析相吻合。利用式(1)即可算得該組合裝置出廠儀器常數:

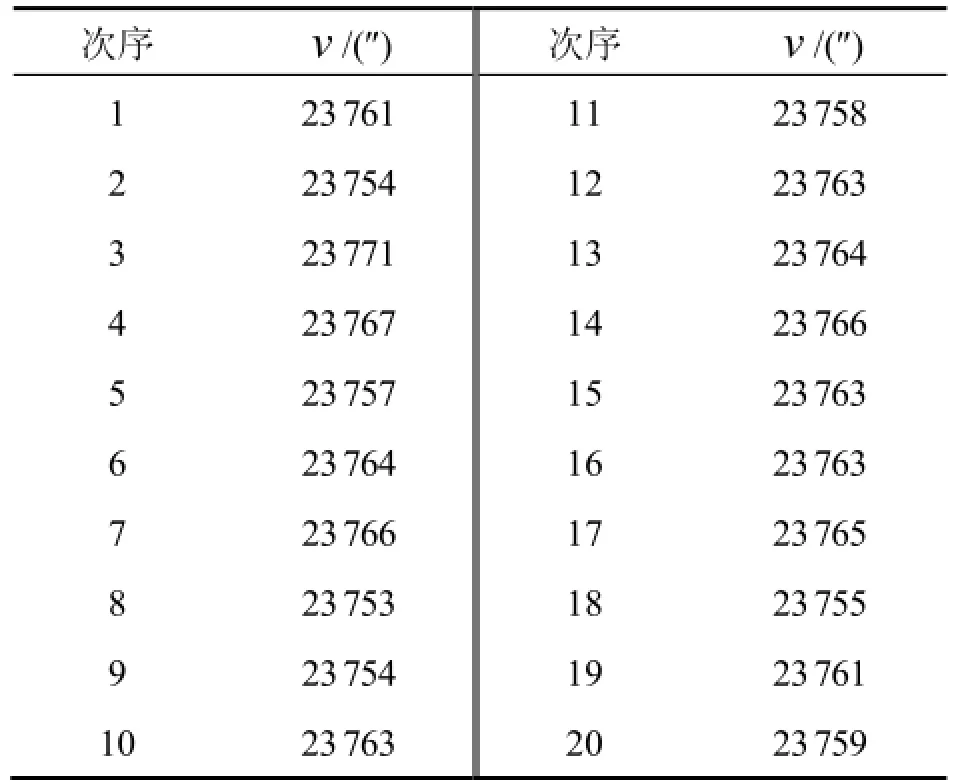
表1 夾角v標定20次重復實驗結果Tab.1 Results of 20 repeated experiments for calibrating v
4 結 論
本文利用測試轉臺的定速旋轉功能,給出了即插即用式光纖陀螺/全站儀組合定向裝置的儀器常數標定方法。通過理論分析,得到了影響標定精度的因素和規律以及所能達到的標定精度。最后,通過對樣機進行實驗測試,驗證了本文方法的正確性。
本文給出的標定方法具有如下特點:① 標定時間短,順時針、逆時針各轉動數秒鐘,所記錄數據即可滿足標定要求;② 對標定條件要求低,所需測試轉臺在市場上很容易買到;③ 完全消除了光纖陀螺零偏對標定的影響,角速率穩定性優于100×10-6的測試轉臺即可將儀器常數的標定精度控制在5″之內。
(References):
[1] 齊永岳, 董桂梅, 林玉池, 等. 全自動陀螺經緯儀尋北技術研究[J]. 儀器儀表學報, 2009, 30(12): 2647-2651.
Qi Yong-yue, Dong Gui-mei, Lin Yu-chi, et al. Wholeautomation north-finding technology of gyro-theodolite [J]. Chinese Journal of Scientific Instrument, 2009, 30(12): 2647-2651.
[2] Wang Tao, Liu Shun, Zhang Ya, et al. Analysis of magnetic suspension gyro total station azimuth directional error and engineering application[C]//2014 International Conference on Materials Science and Computational Engineering. Qingdao, China, 2014: 511-514.
[3] Michael G, David Y, Paul J. High sensitivity ring resonator gyroscopes[J]. Fiber and Integrated Optics, 2011, 30(6): 395-410.
[4] Dell'Olio F, Tatoli T, Ciminelli C, et al. Recent advances in miniaturized optical gyroscopes[J]. Journal of the European Optical Society, 2014, 14013(9): 1-14.
[5] Strandjord L K, Mead D. Fiber optic gyro technology trends - a Honeywell perspective[J]. Optical Fiber Sensors Conference Technical Digest, 2002, 2(1): 5-8.
[6] 于先文, 王慶, 鄭子揚. 具有安裝誤差抵償功能的光纖陀螺/全站儀組合定向方法[J]. 東南大學學報(自然科學版), 2008, 38(4): 621-625.
Yu Xian-wen, Wang Qing, Zheng Zi-yang. Orientation method of FOG/TS with installation error compensation [J]. Journal of Southeast University (Natural Science Edition), 2008, 38(4): 621-625.
[7] 于先文, 薛紅琳. 基于光纖陀螺的即插即用式全站儀定向方法[J]. 儀器儀表學報, 2011, 32(6): 1409-1413.
Yu Xian-wen, Xue Hong-lin. Plug-and-play orientation method of TS based on FOG[J]. Chinese Journal of Scientific Instrument, 2011, 32(6): 1409-1413.
[8] Liu Fang, Wang Wei, Wang Lei, et al. Error analyses and calibration methods with accelerometers for optical angle encoders in rotational inertial navigation systems[J]. Applied Optics, 2013, 52(32): 7724-7731.
[9] Vavilova N B, Sazonov I Yu. Calibration of a readymounted strapdown inertial navigation system on a lowaccuracy turntable with one degree of freedom[J]. Moscow University Mechanics Bulletin, 2012, 67(4): 96-98.
[10] Boronakhin A M, Ivanov P A, Bokhman E D, et al. Test beds for small-sized inertial systems and sensors[J]. Gyroscopy and Navigation, 2012, 3(3): 188-193.
Calibration method for instrument constant of plug-and-play FOG/total station
?
YU Xian-wen1, WANG Yu2, WANG Qing3
(1. School of Transportation, Southeast University, Nanjing 210096, China; 2. School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210024, China; 3. School of Instrument Science and Technology, Southeast University, Nanjing 210096, China)
The calibration of instrument constant is a key technical part of plug-and-play FOG/TS(total station), which can get the reading of TS’s vertical disk when the sensitive axis of FOG is parallel to the TS’s levelness disk. The TS is fixedly connected with the test turntable and keep the vertical axis of TS parallel to the vertical axis of the test turntable. With the FOG sensitive axis being approximate level, the test turntable drive the combination of FOG and TS to rotate clockwise and counterclockwise in a constant velocity respectively and the output data of the FOG were collected even times every revolution. The formula for calculating the angle between the FOG sensitive axis and the TS horizontal disk was deduced. Then the position reading of the TS vertical disk with the FOG sensitive axis being horizontal was obtained, which was regarded as the instrument constant. Theoretical analysis and experimental tests show that the instrument constant can be accurately calibrated with precision being better than 5″ by using the usual turntable.
fiber optic gyroscope; total station; instrument constant calibration; test turntable
P24
A
2015-10-02;
2015-12-29
于先文(1974—),男,副教授,從事GPS精密定位技術、慣性測量技術研究。E-mail: njyxw@sina.com
猜你喜歡
經緯天地(2021年5期)2021-12-27 02:31:46
北京測繪(2020年12期)2020-12-29 01:37:18
礦產勘查(2020年1期)2020-12-28 00:21:36
水電站設計(2020年4期)2020-07-16 08:23:48
工程與建設(2019年3期)2019-10-10 01:40:18
鐵道標準設計(2018年12期)2018-11-22 12:26:38
電測與儀表(2016年9期)2016-04-12 00:29:52
鐵道勘察(2015年2期)2015-03-16 11:34:43
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
