基于過街行人檢測的路口自適應交通信號控制
2016-05-25 00:37:01張慧銘
重慶交通大學學報(自然科學版) 2016年5期
肖 梅,劉 鍇,張 雷,張慧銘,王 杏
(1. 長安大學 汽車學院,陜西 西安 710064;2. 長安大學 公路學院,陜西 西安 710064)
基于過街行人檢測的路口自適應交通信號控制
肖 梅1,劉 鍇1,張 雷1,張慧銘1,王 杏2
(1. 長安大學 汽車學院,陜西 西安 710064;2. 長安大學 公路學院,陜西 西安 710064)
針對行人密度波動大的路口的交通信號配時優化問題,提出了以行人過街請求為主的交通信號配時,搭建了由視頻采集、行人檢測和信號配時構成的交通信號控制系統。視頻采集單元采集行人的圖像數據;行人檢測算法是利用背景重構實時構建行人等候區的背景,繼而以背景減法檢測等候過街的行人;信號配時由等候過街的行人數和等候時長決定。對實際的交通路口進行仿真,結果表明:在行人低峰時段,行人和車輛平均延誤分別為5.62 s/veh和15.99 s/ped,在略微增加行人延誤基礎上,車流的延誤大大降低;在行人高峰時段,車輛平均延誤為52.13 s/veh,行人平均延誤降至8.35 s/ped,優先保證大密度人群順利通過路口。
交通工程;交通控制;過街信號控制;背景重構;行人檢測;視頻圖像處理
0 引 言
交通路口的信號配時優化是在不增加交通基礎設施的基礎上,提高交通參與者的安全和效率,是城市交通系統的研究熱點。目前路口的信號配時設置主要以優化車流為主,行人主要利用機動車紅燈的空隙穿越道路,這樣容易導致行人的等候時間過長和等候延誤。行人的延誤過長會引起行人違章率上升,美國公路通行能力手冊[1](highway capacity manual,HCM)建議,當行人的延誤小于10 s時,能較好地遵守交通規則;但當行人的延誤大于30 s時,行人的交通違章率會增加。過高的行人違章率會嚴重影響車流的運行效率和交通安全[2]。發達國家(如美國等)開始關注于行人和自行車交通,根據2009年美國居民出行調查(national household travel survey,NHTS)統計,非機動車交通比例上升至425億美元[3],隨著行人和自行車交通比例的上升,增加了非機動車交通的基礎設施建設[4]。可見,優化行人的交通信號、減少行人的交通延誤,對于提高城市交通控制系統的安全和運行效率來說尤為重要。
目前,路口的信號配時設置主要以提高車輛的安全、運行效率和減少車輛的延誤為主,主要包括:定時控制[5-6]和實時控制[7-8]。A.KOUVELAS等[5]將韋伯斯特程序用于定時信號控制,在不飽和的交通條件下,定時信號配時有顯著的效果。J.D.SCHM?CKER等[6]以機動車流在交叉口的平均延誤、平均排隊長度及過街行人在交叉口的等候時間為優化目標,建立了交通信號控制參數的多目標優化模型,并基于Bellman-Zadeh模糊邏輯,將多個目標之間的沖突和支配關系轉化為單個目標優化問題。為緩解混合交通條件下的交通擁堵,CHEN Xiaohong等[7]考慮車輛和非機動車的協調,以車流和非機動車數量為輸入,旅行者延誤、停車次數和交通容量為優化目標,飽和度為約束條件,依據混合交通的組成自適應地調整指標的權重,并通過遺傳算法求解多目標模型。該模型可以較好地權衡不同主體的信號配時,緩解混合交通條件下的交通擁堵。KUANG Xianyan等[8]提出了一種基于專家知識的交叉口交通信號控制模型。該信號控制利用交叉口的交通檢測器的檢測信息,決定延長或終止當前的綠燈信號,并調整最佳的信號相位長度來適應交通環境。這些信號控制系統均以車流的信號為主,幾乎忽略行人的等待延誤。
盡管行人的過街安全受到了極大的關注,但是以行人為主的信號控制系統方面的文獻并不多見。為提高行人過街的安全性并及時響應行人過街請求,行人觸動式過街系統被廣泛應用在美國諸多路口。行人過街時,按下過街請求按鈕,信號燈會給出一個固定的行人通行信號。行人觸動式過街系統可以減少58%的行人碰撞,能提高行人的過街安全性[9]。但是由于行人未注意到按鈕、按鍵損壞和系統未及時反應等原因,行人觸動式過街系統使用率還不到50%[10]。由于觸動式過街系統的使用率不高,一些新的基于紅外線、微波、視頻和雷達等傳感器的自動行人檢測裝置被應用于行人信號系統中[11],自動檢測裝置可跟據行人的實際行走速度調整行人信號配時、觸發行人信號和路燈等功能,提高行人配時的有效性和可靠性。由于各傳感器的工作原理不同,其應用范圍也不同,如表1。
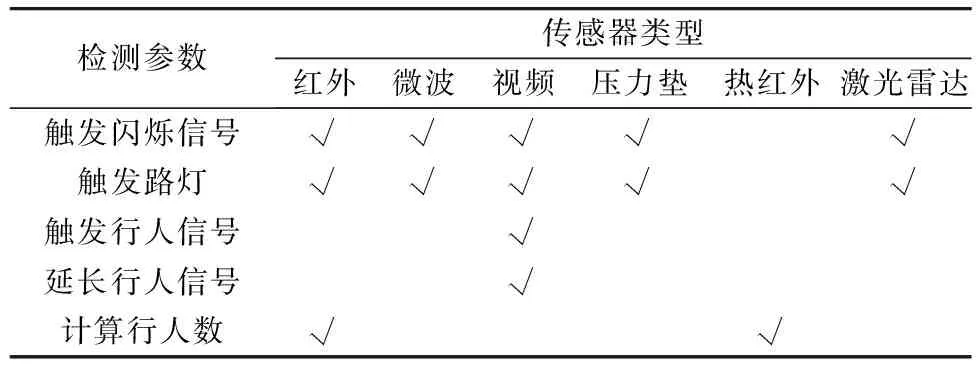
表1 自動行人檢測器的應用
K.LOVEJOY等[12]利用視頻檢測器自動檢測人行橫道上的行人,在不改變信號配時的前提下,據此調整行人的清空時間,可以減少行人和車輛的交通沖突、提高行人交通安全,并探討如何優化信號配時。LU Xiaozhao等[13]基于行人自動檢測裝置開發了模糊邏輯控制器配置動態的行人配時,該系統可以提高行人的安全性。為減少行人交通延誤,T.PETRITSCH等[14]提出了行人服務水平(level of service, LOS)模型。路口的行人延誤定義為周期長和有效綠燈時間的函數,但考慮到行人相位的容許時長和信號控制器運行模式等因素時,定義的行人延誤顯然和實際的復雜情況相距甚遠,這樣計算的行人延誤有較大誤差。S.KOTHURI等[15]提出并測試了減少行人延誤的方法,選擇在波特蘭和俄勒岡的一個半行人信號(僅有一半路口設置有行人信號)和全行人信號(全部路口均有行人信號)路口,測試改變信號配時等參數時行人的延誤。結果表明:在低峰時段不設置多路口信號聯動和增加保護相位時長都會減少行人延誤,但未涉及利用信號配時來減少行人延誤。以行人過街請求信號為主,基于規則的行人信號控制系統[16],以行人自動檢測技術檢測行人的出現、等候時間和行人數,設計了相位結構、相位轉換規則和控制邏輯等。在假定檢測器進度100%時,利用Vissim仿真驗證了系統的有效性。但是該系統還只是處于仿真階段,未涉及行人自動檢測技術的具體實施。
由表1可以看出,由于視頻檢測豐富的色彩和時間特性,被廣泛應用在交通控制中,但是之前的應用卻無法計算行人數。筆者調整視頻采集器的安裝位置,可以實現觸發閃爍信號、路燈和行人信號,計算行人數,并調整行人信號配時等功能。在由車流和人流組成,且人流密度波動大、無規律的交通路口,筆者基于行人視頻自動檢測技術檢測行人、行人數及等候時長等信息,設計了一套基于過街行人檢測的城市道路交通信號控制系統,旨在及時響應行人的過街信號,并減少行人過街對主干道車流的干擾。系統通過視頻圖像采集單元采集等候過街的行人的圖像數據,利用背景減法檢測過街行人,依據過街行人數和等候時長進行交通信號配時,并進行了交通仿真與分析。
1 基于行人的交通信號控制系統
基于過街行人檢測的城市道路交通信號控制系統。包括視頻采集、行人檢測和信號配時3個組成單元。視頻采集單元安裝在過街斑馬線兩側行人等候區的上方,在行人通行信號狀態下,采樣的視頻圖像信號用于場景的背景重構或更新,在行人阻行信號狀態下,采樣的視頻圖像信號用于檢測等候過街的行人;行人檢測單元依據背景重構實時構建行人等候區的背景,繼而以背景減法檢測等候過街的行人;信號配時單元依據等候過街的行人配置行人過街的綠燈信號。系統依據過街行人來配置行人綠燈時長,這樣可以減少固定配時對主干道車輛造成的不必要等候,且能及時響應行人過街請求,體現“以人為本”的交通信號控制。
1.1 行人視頻采集
系統以響應行人過街請求為主,因而對行人視頻采集主要是針對行人等候過街的區域。通常,行人多在斑馬線附近等候過街,因此,行人視頻采集主要針對斑馬線附近的等候過街區。行人等候區為一虛擬的矩形區域,實際中,可在斑馬線兩端設置矩形的行人等候區,并標以“過街行人等候區”字樣。行人檢測只針對行人等候區進行處理,用r和c表示等候區的行數和列數。
1.2 行人檢測算法
運動目標檢測算法主要有光流法、幀差法和背景重構法等3種。光流分析法能夠探測獨立運動的對象,不需要預先知道場景的任何信息,可用于攝像機運動的情況,但光流法對光線和噪聲的變化特別敏感且計算復雜、耗時;幀差法分離出來的運動目標會出現“空洞”和“拉伸”, 當時間間隔選擇不適當時容易出現檢測不到物體的情況,不利于進一步的分析與識別;基于背景減法的行人檢測方法簡單,一旦背景構建好之后,能實時地檢測行人,且提取的行人完整。故采用基于背景減法的行人檢測方法。行人檢測算法包括行人等候區的背景重構、背景更新和行人檢測。在行人通行時進行背景的重構和更新,在行人阻行時執行行人檢測算法。
1.2.1 行人等候區的背景重構
行人等候區設置在斑馬線附近,通常為一致的道路顏色,但是由于行人等候區存在暫停的車輛/行人、亂扔的雜物、噪聲和駛過的灑水車等等因素的干擾,增加了處理的難度。此外,為滿足系統的存儲空間少、實時性要求高的特點,采取筆者提出的在線聚類背景重構算法[17]。每個像素最多用兩幅背景表征,用ft(p)表示像素p在第t幀的灰度值,N為聚類數,Ck(p)表示像素p第k個類的中心,mk(p)表示像素p的第k個類的數據數,以像素p為例說明算法步驟。
步驟1:建立初類。初類的中心、初類的數據數分別如計算式(1)和式(2):
Ck(p)=ft(p)
(1)
mk(p)=1
(2)
式中:Ck(p)和mk(p)分別為k類的中心和數據數,形成的總聚類數N=1,此時t=1。
步驟2:輸入新數據ft(p),采用歐式距離計算ft(p)和已形成的所有類間的距離。
步驟3:尋找與ft(p)距離最近的類。如形成的N類中存在類k滿足計算式(3),則類k即為與ft(p)距離最近的類:
(3)
(4)
mN(p)=mN(p)+1
(5)
CN(p)=ft(p)
(6)
mN(p)=1
(7)
步驟5:計算所有灰度類的頻率。第k類的頻率Wk(p)計算為式(8)所示:
(8)
步驟6:背景選擇。對像素p的背景選擇策略如下:
1.2.2 行人等候區的背景更新
實際場景中由于前景運動的短暫靜止、光線突變等原因,背景常常會發生變化,故背景圖像應當能自適應更新。背景更新的方法通常有定時更新和條件更新兩種。定時更新即在規定時間段中(5~10min),抽取最后10~20s圖像序列,對場景進行背景重構;條件更新策略通常是設定一定的條件,一旦場景變化滿足條件則進行背景重構。
文中算法采取條件更新策略,條件更新滿足以下條件:① 若在行人通行信號狀態下,連續多幀與背景參考幀差分后所得差分圖像中,發生變化的像素數與全部像素數的百分比大于某一個閾值(通常取80%),則背景發生了變化,對場景的背景用本文的背景重構算法進行重構;② 若在行人通行信號狀態下,某一固定區域連續被檢測為運動目標,且該固定區域在連續多幀像素灰度值平穩,則該固定區域的背景發生了變化,認為前景靜止了較長時間,直接將該區域連續多幀的灰度均值作為該區域的次優背景值。
1.2.3 行人等候區內的行人檢測
在行人阻行時,行人檢測采用直接背景差分法,行人檢測的采樣時間選定為0.5~1s為合適。行人檢測表示為:
Mt(x,y)=
(9)
式中:bi(p)為像素p的第i個背景灰度值;ft(p)為像素p在第t幀的灰度值,筆者圖像幀的采樣間隔為1s;δ為設定的門限值,取和背景重構相同的閾值;Mt(p)=1表示像素p為行人,Mt(p)=0表示像素p為背景。
1.2.4 等候過街的行人數和等候時長
用pdt為提取的第t幀時的行人等候幀,則像素p的等候時長Dt(p)計算如式(10):
Dt(p)=
(10)
式中:Dt(p)=0表示像素p為背景;Dt(p)=a表示像素p為行人,且等待時長為as,a為整數。在系統初始化階段,令t=0,等候行人數為Dt(p)=0。
為準確地提取等候的行人數和行人的等候時長,首先需要對pdt進行去零星操作。第t幀時等候的行人像素數Nt為Dt(p)中滿足Dt(p)>0的所有像素數之和,用計算式表示如式(11):
(11)
式中:#為像素的數量;Nt為第t幀等候的行人的像素數。
第t幀行人的最長候時Qt(p)為Dt(p)中像素的最大值,用計算式表示如下:
(12)
1.3 信號配時
平面交叉路口中“以人為本”的信號配時方案為:在行人阻行時,檢測等候過街的行人和最長候時,當行人檢測單元未檢測到有過街行人時,保持主干道車流的通行信號;一旦檢測到有等候過街行人,且行人的最長候時大于一定值時(通常取5~10s),則認為有行人等候過街,開啟行人通行信號,主干道車流黃閃時間為3s,行人綠燈開啟時長為Gps。根據美國交通信號配時手冊[19],主干道車流的最短的綠燈時間設置為10~15s,本信號系統設置車流的最短的綠燈時間為15s。
行人通行綠燈時長Gp計算如式(13):
Gp=
(13)
式中:L為人行橫道長度,m;Sp為平均的行人行走速度,通常取1.2 m/s;Nped為過街行人數;WE為人行橫道的寬度,m。
當取L=18 m,Sp=1.2 m/s,WE=3.5 m時,由計算式(13)得出行人通行綠燈時長Gp與過街人數的關系如圖1。由圖1可知,隨著過街人數的增加,行人的通行的綠燈信號時長也會線性增加,當過街行人數為1人時,行人綠燈時長Gp為19 s,當過街人數增加至35人時,行人綠燈時長Gp為46.8 s。筆者通過視頻設備檢測過街的行人數,自適應地調節行人過街的信號時長。
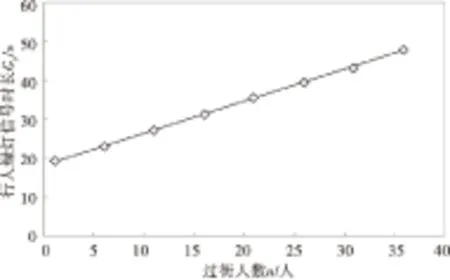
圖1 過街行人數與行人信號時長Fig.1 The number of people crossing the street and pedestrian signal duration
過街行人數Nped計算如式(14):
(14)
式中:Lp和Wp分別為等候區的長和寬;Pp為行人的站立空間,常取Pp=0.6 m2;Nh為行人等候區的像素數;Nt為等候區的總的像素數目。
需要說明的是,對于視頻的背景重構、行人檢測和行人等候時長等處理均是針對行人等候區。
2 仿真實驗與分析
仿真實驗針對無信號控制的T字路口進行展開,該路口人行橫道寬度為WE=5 m,長度為L=18 m,南北向為直行車輛,東西向為過街的學生。為驗證實驗的有效性,分別進行了行人檢測和通行能力的仿真實驗。
2.1 基于背景減的行人檢測實驗
為了驗證文中算法的有效性,對實拍的行人過街的視頻進行仿真實驗,視頻采樣間隔為1幀/s。對視頻圖像進行處理提取等候的行人是關鍵,影響著系統工作的穩定性和適用性,選擇部分視頻處理的仿真結果顯示于圖2~圖3。
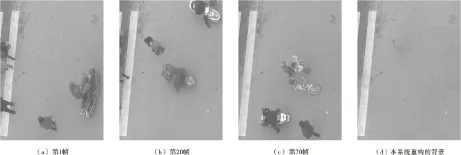
圖2 行人通行時的背景重構結果Fig.2 Background restructuring when the traffic light is green for pedestrian crossing
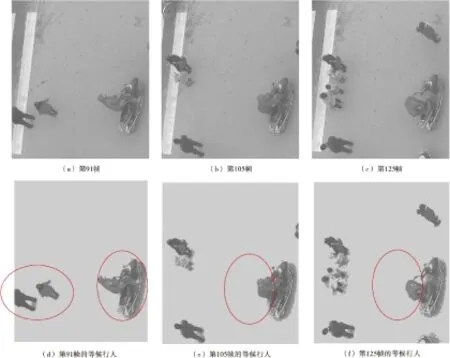
圖3 行人阻行時的行人檢測結果Fig.3 Waiting pedestrian detection when the traffic light is red for pedestrian
圖2為行人通行時間段內對場景的背景重構結果。圖2(a)~(c)分別是在行人通行時對視頻圖像的采樣,在采樣階段仍有行人進入和離開。圖2(d)為文中背景重構算法構建的背景,由圖2(d)可見,算法構建的背景是有效的,當然,背景重構效果的好壞直接影響著行人檢測的效果。圖3為行人阻行時間段內對行人的檢測結果。圖3(a)~(c)為第91幀、第105幀和第125幀的采樣圖像幀,圖3(d)~(f)分別為第91幀、第105幀和第125幀的行人檢測結果,檢測的行人的最長候時分別為1,15,35 s。圖3中橢圓標注了最長的等候行人的區域塊。
2.2 通行能力
在對西安市南郊某路口的實際交通狀況進行驗證。一所學校設置在主干道的東側,主干道為雙向四車道,單車道寬3.5m,南北主要為流量較大的車流,限速為60 km/h,東西為上下學的學生流。由于人流的高峰主要集中在學生上、下課的時段,固定的信號配時和主干道車流感應的信號控制均不適合該路口,故目前該路口并未設置交通信號燈。
對該路口的實際交通數據進行實地觀測,調研數據為:車流高峰有早、中和晚3個高峰時段,高峰時段分別為07:00—9:00, 11:30—13:30和16:00—18:00,其高峰時段單向雙車道車流平均為3 000,2 200,3 000輛/h,低峰時段為1 500輛/h。行人高峰時段分別為07:30—08:10, 11:30—12:10, 13:50—14:20和16:10—16:50,高峰時段和低峰時段人流密度大約為2 000人/h和300人/h。將調研的交通數據在Vissim微觀仿真軟件中進行仿真,仿真時間從07:00—18:00,仿真結果分別與無信號燈和固定配時信號控制作比較。
無信號燈、固定配時信號控制和本系統信號配時方案為:本系統的信號配時參數選擇為:行人檢測采樣時間為1 s,L=18 m,Sp=1.2 m/s,WE=3.5 m,Pp=0.6 m2,Lp=4 m,Wp=5 m,Nt=r·c=97 200,通過計算可得:19 s≤Gp≤45 s,故本系統信號配時在19 s和45 s之間變動;無信號配時方案嚴格遵循車讓人的交通規則;固定信號配時方案采用兩段式配時,具體為:周期長為120 s,人流高峰時段取行人的綠燈時長為45 s,人流低峰時段行人的綠燈時長為19 s,黃閃3 s。仿真結果分別如表2和表3。
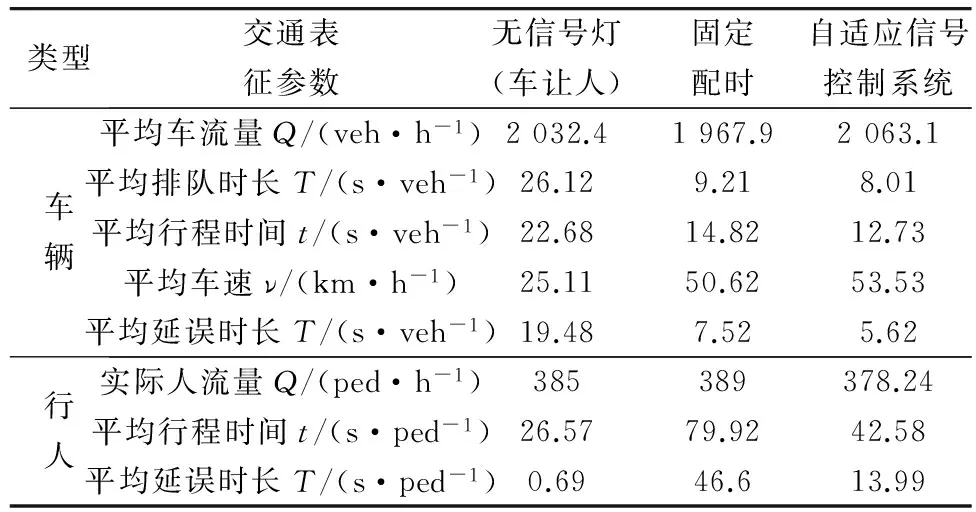
表2 行人低峰時段的仿真結果
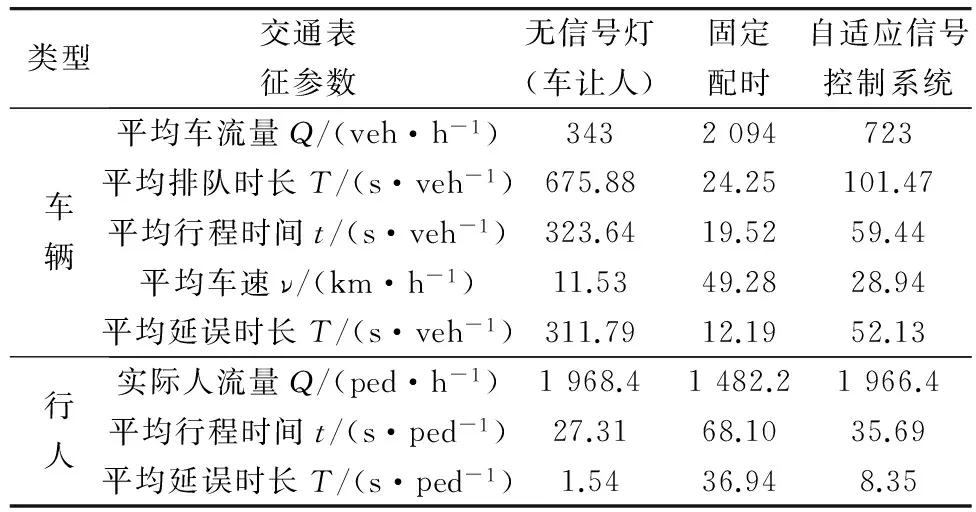
表3 行人高峰時段的仿真結果
表2為人流量為低峰時的仿真結果。當路口人流量較低時,無信號燈(車讓人)的信號配時的行人平均延誤很少為0.69 s,盡管對車流量影響不大,但是車流的車速下降了近50%,平均延誤為19.48 s,平均排隊時長為26.12 s;固定信號配時以車流需求為主,車輛的平均延誤低,為7.52 s,平均行駛車速為50.62 km/h,卻易引起行人的平均延誤上升,為46.6 s,過高的行人延誤將導致高的行人違章率,容易誘發交通事故;和固定配時相比,提出的自適應信號控制系統,車輛的平均延誤減少1.85 s/veh,車輛行駛速度略有提高,行人的平均延誤減少至13.99 s,可見自適應的控制系統能減少車流和行人延誤。
表3為人流量高峰時的仿真結果。當路口人流量為高峰時,即為學生的上下課高峰時段,此時需要保證行人順利地通過路口,避免大量行人的聚集。無信號燈(車讓人)配時方案主要以行人過街為主,能確保行人在最低的延誤下順暢通過路口,可是對車流的影響極大,實際通過車流量下降為343 veh/h,車輛平均排隊時長和平均延誤分別為675.88 s/veh和311.79 s/veh;固定配時信號控制方案未考慮路口行人為學生的特殊性,在保證車流通暢的前提下,對行人造成了較大延誤,行人平均延誤36.94 s/ped,實際通過的行人量為1482.2 ped/h,容易造成行人的聚集;而本文提出的自適應信號控制系統,行人平均延誤低,為8.35 s/ped,低的行人延誤對車流也有一定的影響,車流平均排隊時長為101.47 s/veh,車輛平均延誤為52.13 s/veh,保證行人順利通過路口。可見,本文提出的信號控制系統,在人流高峰時段時,以行人通行信號為主,在適當延長行人的行程時間和延誤時,能大大改善主干道車輛的擁堵。
需要說明的是,現階段對本系統開展實用前的仿真試驗,一方面試驗所用視頻是人工用攝像機從近旁建筑物上采集得到,故可見試驗視頻幀有輕微傾斜;另一方面由于實際道路上并未嚴格標示“行人等候區”等字樣。一旦本系統真正投入實用,采用專門安裝于路側的攝像頭采集圖像,且減少了其它前景的干擾,系統將能取得更理想的實驗結果。
3 結 語
經過仿真試驗,該系統在以下方面取得了進展:① 搭建了系統的結構框架,仿真實驗驗證系統的結構是合理的、可行的;② 在線聚類算法可以滿足較好地構建場景的背景;③ 采用數字圖像的處理方法,能準確檢測等候的行人數及行人的等待時間。
筆者并未考慮行人的過街特性,過街行人的數量、年齡等因素對行人的行走速度對自適應配時有影響,筆者將進一步研究“批與群”的過街特性對信號配時的影響。為使系統在實際中能真正實用,彩色圖像的背景重構算法和對典型路口進行全天候的實驗和基于過街人數的行人綠燈信號的合理設置也是下一步的研究重點。
[1] Transportation Research Board.HighwayCapacityManual[M]. USA: Transportation Research Board,2010.
[2] WANG Wuhong, GUO Hongwei, GAO Ziyou, et al. Individual differences of pedestrian behaviour in midblock crosswalk and intersection[J].InternationalJournalofCrashworthiness,2011,16(1):1-9.
[3] Federal Highway Administration.NationalHouseholdTravelSurvey[M]. USA: Federal Highway Administration,2009.
[4] Federal Highway Administration.UnitedStatesDepartmentofTransportationPolicyStatementonBicycleandPedestrianAccommodationRegulationsandRecommendations[R]. USA: Federal Highway Administration,2010.
[5] KOUVELAS A, ABOUDOLAS K, PAPAGEORGIOU M, et al. A hybrid strategy for real-time traffic signal control of urban road networks[J].IEEETransactionsonIntelligentTransportationSystems,2011,12(3):884-894.
[6] SCHM?CKER J D, AHUJA S, BELL M G H. Multi-objective signal control of urban junctions-framework and a London case study[J].TransportationResearchPartC:EmergingTechnologies,2008,16(4):454-470.
[7] CHEN Xiaohong, QIAN Dalin, SHI Donghua. Multi-objective optimization method of signal timing for the non-motorized transport at intersection[J].JournalofTransportationSystemsEngineeringandInformationTechnology,2011,11(2):106-111.
[8] KUANG Xianyan, XU Lunhui. Real-time traffic signal intelligent control with transit-priority[J].JournalofSoftware,2012,7(8):1738-1743.
[9] FITZPATRICK K, PARK E S. Safety effectiveness of HAWK pedestrian treatment[J].TransportationResearchRecord:JournaloftheTransportationResearchBoard,2009,2140:214-223.
[10] HUGHES R, HUANG H, ZEGEER C, et al. Automated detection of pedestrians in conjunction with standard pedestrian push buttons at signalized intersections[J].JournaloftheTransportationResearchBoard,2001,1705:32-39.
[11] MARKOWITZ F, MONTUFAR J. Recent developments in automated pedestrian detection[C]//ManagingOperationalPerformanceExceedingExpectations, 2012ITETechnicalConferenceandExhibit. Washington, D.C.: Institute of Transportation Engineers,2011.
[12] LOVEJOY K, MARKOWITZ F, MONTUFAR J. Use of video for automated pedestrian detection and signal-timing extension: results from a pilot installation in San Francisco, California[C]//TransportationResearchBoard91stAnnualMeteting. Washington, D.C.: Transportation Research Board,2012.
[13] LU Xiaozhao, NOYCE D A. Pedestrian crosswalks at midblock locations: fuzzy logic solution to existing signal operations[J].JournaloftheTransportationResearchBoard,2009,2140(1):63-78.
[14] PETRITSCH T, LANDIS B, MCLEOD P, et al. Pedestrians: level-of-service model for pedestrians at signalized intersections[J].JournaloftheTransportationResearchBoard,2005,1939(1):55-62.
[15] KOTHURI S, REYNOLDS T, MONSERE C, et al. Testing strategies to reduce pedestrian delay at signalized intersections: a pilot study in Portland, Oregon[C]//TransportationResearchBoard92ndAnnualMeeting. Washington, D.C.: Transportation Research Board,2013.
[16] NI Ying, DENG Tengyun, LI Keping. Pedestrian accommodation in intersection signal system: rule-based dynamic pedestrian control strategy[C]//TransportaionResearchBoard93rdAnnualMeeting. Washington, D.C.: Transportation Research Board,2013.
[17] 肖梅,韓崇昭.基于在線聚類的背景減法[J].模式識別與人工智能,2007,20(1):35-41. XIAO Mei, HAN Chongzhao. Background subtraction algorithm based on online clustering[J].PatternRecognitionandArtificialIntelligence,2007,20(1):35-41.
[18] STAUFFER C, GRIMSON W E L. Adaptive background mixture models for real-time tracking[C]//ProceedingsoftheIEEEComputerSocietyConferenceonComputerVisionandPatternRecognition. Los Angeles, CA, USA : IEEE,1999:246-252.
[19] PETER K, LEE R, KEVIN L, et al.TrafficSignalTimingManual[R]. McLean, VA, USA: Department of Transportation Federal Highway Administration,2008.
Adaptive Traffic Signal Control on Urban Intersection by Waiting-to-cross Pedestrian Detection
XIAO Mei1,LIU Kai1,ZHANG Lei1,ZHANG Huiming1,WANG Xing2
(1. School of Automobile, Chang’an University, Xi’an 710064, Shaanxi, P.R.China; 2. School of Highway, Chang’an University, Xi’an 710064, Shaanxi,P.R. China)
To optimize the time distribution from traffic signal at urban intersections with unstable crowd density, an adaptive traffic signal control system based on pedestrian request was developed. This adaptive signal control system consisted of image sequence capture by video, pedestrians’ detection and signal phase transition modules. Image sequence was captured by sequence capture unit. In pedestrians’ detection algorithm, a background reconstruction technology was applied to build background of scene, and then the waiting pedestrians were acquired in real-time through background subtraction. The pedestrians’ green phase was determined based on the number and associated waiting time of pedestrians in the waiting area. The effectiveness of algorithms was tested in a real road intersection. The mean delay of pedestrian and vehicle are 5.62 s/veh and 15.99 s/ped in low pedestrians peak. While the pedestrians are in high peak, the mean delay of vehicle is 52.13 s/veh and the mean delay of pedestrian is 8.35 s/ped.
traffic engineering; traffic control;crossing signal control;background reconstruction;pedestrians detection;video image processing
10.3969/j.issn.1674-0696.2016.05.24
2015-07-07;
2015-10-22
國家自然科學基金項目(61004087);陜西省國際交流合作項目(2015KW-009)
肖 梅(1977—),女,江西安福人,教授,博士,主要從事視頻圖像處理方面的研究。E-mail:27294664@qq.com。
U491.7;TN 919.8
A
1674-0696(2016)05-120-07
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
當代陜西(2020年14期)2021-01-08 09:30:42
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
