基于RSSI的測距優化和三邊定位算法研究
2016-05-27 07:02:18陳磊,劉偉
湖北工業大學學報 2016年2期
陳 磊, 劉 偉
(湖北工業大學計算機學院, 湖北 武漢 430068)
基于RSSI的測距優化和三邊定位算法研究
陳磊, 劉偉
(湖北工業大學計算機學院, 湖北 武漢 430068)
[摘要]運用RSSI測距技術測量目標節點與已知錨節點之間的距離。提出一種動態的優化模型對RSSI測距值進行優化處理,減少測距誤差提高精度。最后,運用三邊測量定位算法得到目標節點坐標信息。室外實驗數據以及仿真結果表明,該方案對于傳統定位方法有明顯的定位精度提升。
[關鍵詞]信號接受強度(RSSI); 無線傳感器網絡; 測距優化; 三邊測量定位算法
近年來,對于無線傳感器網絡的研究正在逐步增長,節點定位技術是無線傳感器網絡技術和應用的基礎之一[1]。目前,無線傳感器網絡中節點自身定位方法分為兩類:基于測距和無需測距兩種技術。由于基于測距的定位技術有著較高的精度,所以得到了廣泛的應用。傳統的測距技術有:時間到達(Time of Arrival, TOA)、時間差到達(Time Difference of Arrival, TDOA)、角度到達(Angle of Arrival, AOA)、信號接收強度(Received Signal Strength Indicator, RSSI)[2-4]。由于基于無需測距的技術大部分只是在理論方面的研究,并且定位精度較低,所以它的應用范圍有一定局限性。
RSSI測距技術主要分為2種。一種是通過測取大量的RSSI測距數據,利用信號傳播理論模型,建立信號衰減和傳播距離之間的公式[5]。另外一種則是利用信號傳播的經驗模型。通過在試驗環境中選取測試點,記錄這些基站收到的信號強度,建立位置和信號強度關系的離線數據庫[6]。其弱點是測距精度不穩定。信號的反射、多經、視距不可達以及天線增益等各種因素都會影響到傳播信號的衰減,而導致測距精度下降。所以,如何提高RSSI測距精度是一個很有意義的問題。
針對提高測距精度,提出一種新的室外定位方案,用以提高在人車混合的室外環境下的定位精度。本文將定位方案分為三個部分。首先,利用RSSI測距算法獲取目標界定于定位節點之間的距離值。然后,提出一種數學優化模型用于優化測量數據。最后,運用三邊定位算法計算出目標節點的位置信息。仿真結果表明,這種方案對于傳統定位算法在精度上有一定的提升。
1RSSI測距算法
1.1基于信號傳播理論模型
在上文中提到RSSI測距技術主要有兩種方法。一種是利用信號傳播理論模型,考慮到環境因素對信號傳播的影響,建立信號衰減和傳播距離之間的關系[8]。通常其模型都表示為
(1)
其中n為路徑損耗指數,一般與環境相關。d為發射節點與接受節點之間的距離,Xσ為均值為σ的高斯分布,一般σ=0。d0為參考距離,P0則為在參考距離d0下接收的信號強度值。
通過對公式(1)的轉化,可以得到RSSI值與距離之間的直接關系。
RSSI_value(dB)=-10nlg(d)+A
這里設置參考距離d0為1 m,而A則是在1 m情況下接收到的信號強度。
1.2基于信號傳播經驗模型
另一種RSSI測距算法則是建立一個RSSI值與距離之間的映射數據庫。在本文中,通過大量的試驗數據建立了一個RSSI值與距離的離線數據庫。在離線環境下,發射端距離接收端100 m,并且以1 m的步長向接收端逼近,在每一個步長分別統計300數據包,用以建立該環境下的RSSI值與距離值的數據庫。
2測距優化模型
室外環境下相對簡單,沒有太多遮擋物遮擋,只用通過合理的搭建天線,就可以基本保證視距可達測距。在這種情況下數據并不需要太多處理,只用過濾掉因偶然環境改變而造成的測距抖動。但是由于測距信號受到行人和車輛的影響,測距結果隨時可能產生抖動與峰值,這對于定位結果會造成巨大的誤差。為了減小測距誤差,本文提出了一個動態優化模型對測距結果進行優化。這里假定行人與車輛的最小移動速度為Vmin。當有人員車輛移動的情況下,測距結果就會出現抖動,所以此刻的測距結果d(k)與下一次的測距結果d(k+1)應該存在以下的數學關系:
但是,當行人車輛的移動速度增加的時候,測距誤差也會增加。根據對已測數據進行分析可知,測距的最小值總是在真實值附近波動。但是由于行人車輛的快速移動,測距的最大值卻遠大于真實值。考慮到行人車輛出行的情況與其特有的速度特性。在此提出一種數學優化模型來降低測距誤差。

在上述公式中,
μ=0,σ=Vmin
x_dis=d(k+1)-d(k)
為了證實以上優化模型的可行性,分析這種優化模型是否能達到預想結果。實驗設定Vmin=2 m/s。
圖1展示了優化前后的測距結果。很明顯,由移動物體引起的測距波動有了巨大的削弱。經過處理后測距結果更加接近真實值且波動性更平穩。仿真結果表明,這種優化模型對于處理這種問題有比較好的效果。

(a)測距10 m仿真圖

(b)測距82 m仿真圖圖 1 優化前后對比圖
3三邊測量定位算法
目前已有很多定位技術:例如三邊測量算法,最大似然算法、極大-極小算法等[7]。由于三邊測量算法計算復雜度低并且有不錯的定位精度,本文采用三邊測量算法來計算目標節點的坐標信息。
三邊測量算法是基于幾何學原理的算法。它需要至少3個已知節點通過測量到目標節點的距離來進行定位計算。其原理見圖2。

圖 2 三邊測量算法原理圖
假定有n個節點隨機分布在無線傳感器網絡之中,他們的位置信息是已知的:(x1, y1) (x2, y2) (x3, y3) ... (xn, yn)。假定目標節點的位置信息為X (x, y)。目標節點到各個已知節點之間的距離
以已知節點為圓心,已知節點到目標節點的距離為半徑作圓。理論上來說,三個圓的交點則為目標遠點的坐標。
三邊測量算法公式為
通過上述公式的變形與轉換,可以直接得到目標節點的坐標信息為X(x,y):
但是,在大多數情況下由于測距結果的不準確,三個圓不一定會有交點,或者三個圓相交產生了一個區域。當圓沒有相交的點時,適當增加圓的半徑直到兩圓相交產生交點。另一方面,當三圓相交產生了一個兩個交點時,以這兩交點的平均值作為相交點的坐標[8]。
4實驗結果與分析
在操場的試驗環境中,實驗采用4個節點的最簡系統來對目標節點進行定位與監測。為了簡化計算,實驗將4個節點布置在同一個高度,同時在試驗環境中,將每個節點的Z坐標設置為0,這樣,所有的節點和目標節點在三維坐標系統中的xoy平面中。
在本文中,定位實驗大致分為三個主要部分。第一,通過運用RSSI測距技術測量目標節點與已知節點距離。第二,通過提出的數學優化模型對測距結果進行優化,對環境改變而引起的測距抖動進行優化。第三,運用三邊測量算法計算目標節點位置坐標信息。
在試驗中,將已知的固定節點稱為A、B、C、D,然后建立三維坐標體系。運用卷尺等測量儀器精確測量各已知節點之間的實際距離。運用空間幾何學知識確定相對坐標系中已知節點的坐標信息。通過測量,在表1中給出了各已知節點的坐標信息。
文中進行了兩組實驗,用來比較傳統定位算法與本文提出的定位算法。每組實驗中采集96組實驗數據,通過大量的實驗對比來驗證其真實性。表2給出了用來進行定位計算的實驗數據統計表。
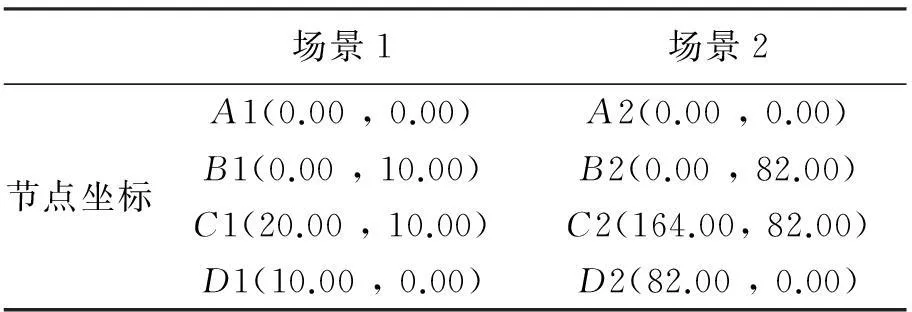
表1 節點坐標

表2 實驗數據統計表
從表2試驗數據統計表中可以看到,采用優化模型優化RSSI測距數據之后,測距值更加接近于真實值,并且數據波動性更加平穩。在測距效果上有著明顯的優化效果。
運用RSSI測距技術得到目標節點與各個已知節點之間的距離值。通過三邊算法計算出目標節點的位置坐標,運用極大似然估計算法進行定位結果參照[9]。實驗仿真結果在圖3中進行說明。
圖3a與圖3b中,黑色的空心方格為真實坐標位置信息。從圖3中可以明顯看到,當測距數據產生抖動時,本文提出的定位算法較傳統定位算法有明顯的定位精度提升。使得定位結果更加接近于真實值。當測距數據相對穩定趨近于真實值的時候,三邊測量算法與極大似然算法都有一個不錯的定位精度。實驗定位節點都在真實節點附近分布。

(a)實驗場景1定位結果仿真圖
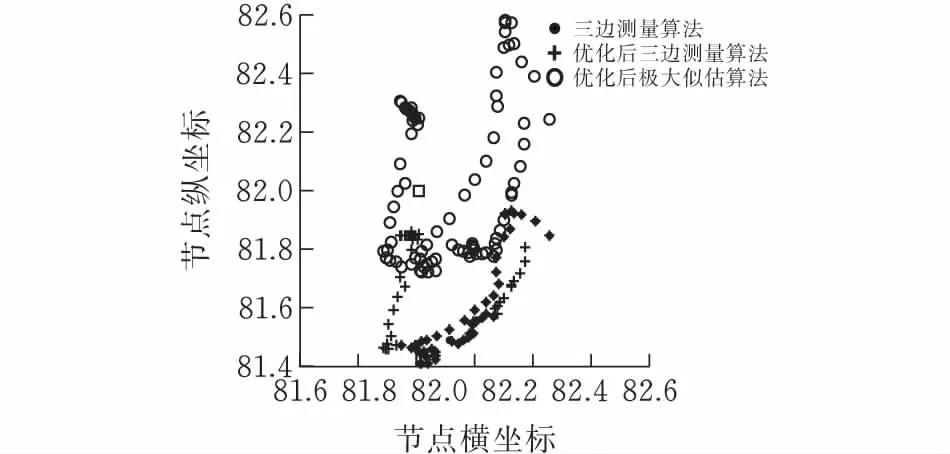
(b)實驗場景2定位結果仿真圖圖 3 定位結果仿真圖
5結語
本文是基于無線傳感器網絡的研究。提出了一種數學優化模型用來優化測距抖動數據,提高測量精度,進一步實現三邊測量算法的定位精度。實驗仿真結果表明這種優化方法確實能夠提高定位精度。在實際系統中,三邊算法是實際系統的簡化算法,如何將三邊系統運用到多邊系統中是接下來要解決的重點問題。
[參考文獻]
[1]Han S, Lee S, Lee S, et al. Node distribution-based localization for large-scale wireless sensor networks [J]. Wireless Networks, 2010, 16(5): 1 389-1 406.
[2]王福豹, 史龍, 任豐原. 無線傳感器網絡中的自身定位系統和算法[J]. 軟件學報, 2005, 16(5).
[3]Dieng N A, Chaudet C, Charbit M, et al. Experiments on the rssi as a range estimator for indoor localization[C]//New Technologies, Mobility and Security (NTMS), 2012 5th International Conference on. IEEE, 2012: 1-5.
[4]彭宇, 王丹. 無線傳感器網絡定位技術綜述 [J]. 電子測量與儀器學報, 2011, 25(5): 389-399.
[5]陶為戈, 朱呋華, 賈子彥. 基于RSSI混合濾波和最小二乘參數估計的測距算法[J]. 傳感技術學報, 2012, 25(12): 1748-1753.
[6]王緩緩, 胡愛娜. RSSI 和距離區間映射的測距方法[J]. 電子科技大學學報, 2012, 41(4): 522-526.
[7]Goldoni E, Savioli A, Risi M, et al. Experimental analysis of RSSI-based indoor localization with IEEE 802.15. 4[C]//Wireless Conference (EW), 2010 European. IEEE, 2010: 71-77.
[8]Jie Z, HongLi L. Research on ranging accuracy based on RSSI of wireless sensor network[C]//Information Science and Engineering (ICISE), 2010 2nd International Conference on. IEEE, 2010: 2338-2341.
[9]Chu S I, Hsieh K T, Chen Y H. Enhanced maximum likelihood location estimation in wireless sensor networks[C]//Wireless Sensor Network, 2010. IET-WSN. IET International Conference on. IET, 2010: 239-242.
[責任編校: 張巖芳]
Ranging Optimization Based on RSSI and Trilateration Method
CHEN Lei,LIU Wei
(SchoolofComputerScience,HubeiUniv.ofTech.,Wuhan430068,China)
Abstract:The ranging technique based on Received Signal Strength Indicator (RSSI) is often used in localization of Wireless Sensor Networks (WSNs). Meanwhile, many research efforts have been made to devise efficient range-based outdoor localization techniques. In this paper, we use RSSI algorithm to range the distance between the nodes and target node. Then, a dynamic optimization model has been proposed to reduce the ranging error for increasing the ranging precision. Finally, we sketchy calculate the target node coordinates using trilateration algorithm. The results of the experiments in the outdoor environment and simulation show that the proposed scheme provides a higher accuracy than the traditional method and the outdoor navigation service using the proposed scheme works properly.
Keywords:RSSI; WSNs; ranging optimization; Trilateration
[收稿日期]2015-05-19
[基金項目]湖北省武漢市科技攻關項目(201210421134)
[作者簡介]陳磊(1990-), 男, 湖北武漢人,湖北工業大學碩士研究生,研究方向為無線傳感器網絡
[文章編號]1003-4684(2016)02-0049-04
[中圖分類號]TP393
[文獻標識碼]:A