自動化碼頭堆場集裝箱間距選擇分析
2016-05-28 08:45:17青島前灣智能集裝箱碼頭有限公司修方強呂向東
港口裝卸 2016年2期
關鍵詞:安全性
青島前灣智能集裝箱碼頭有限公司 修方強 呂向東 李 波
?
自動化碼頭堆場集裝箱間距選擇分析
青島前灣智能集裝箱碼頭有限公司修方強呂向東李波
摘要:分析了八繩纏繞結構下自動化碼頭集裝箱間距,給出了鋼絲繩與垂直方向夾角計算公式和鋼絲繩垂直方向夾角計算公式,分析了合理的間距設計,從而保證集裝箱堆場裝卸生產的安全性和高效性。
關鍵詞:八繩防搖結構; 鋼絲繩; 安全性; 高效性
1前言
集裝箱自動化碼頭堆場設備采用全自動化堆垛機(簡稱ASC),其吊具采用八繩結構進行防搖。當吊具下降時,如果在小車方向上集裝箱間距設置不當, 八繩防搖結構的纏繞特點會造成鋼絲繩與相鄰匹數間的集裝箱可能發生摩擦,造成箱損或鋼絲繩損傷,尤其當ASC在同一貝內間隔2匹5層高箱堆碼作業時,此種情況更易發生。因此,有必要對集裝箱匹與匹之間的距離進行計算分析, 從而保證堆場裝卸生產的安全性和高效性。
2鋼絲繩與垂直方向的夾角計算
以1#、2#鋼絲繩為例, 計算當吊具位于一層高的集裝箱上鋼絲繩與垂直方向的夾角α,如圖1所示。
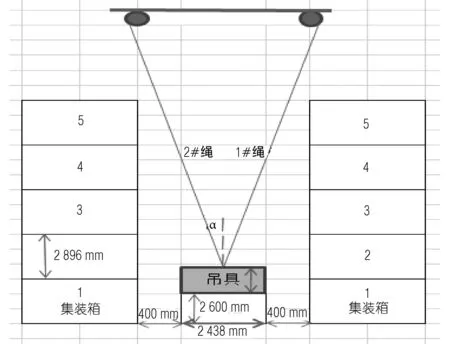
圖1 作業示意圖
其中,ASC小車架離地面高度約為25 000 mm,吊具最大起升高度約為18 100 mm,吊具高度約為2 000 mm。
小車架鋼絲繩吊點和吊具上架鋼絲繩吊點如圖2、圖3所示。
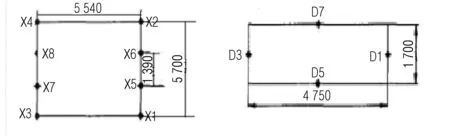
圖2 小車架吊點簡化圖 圖3吊架上吊點簡化圖
其中,X1X3=5 540 mm,X1X2=5 700 mm。
1#~8#繩在小車架上吊點為X1~X8,在吊具上架上為D1~D8(D1與D2重合,D3與D4重合,依次類推)。
將起升機構在水平面上投影,小車中心和吊具中心重合,得小車起升機構水平面投影圖,見圖4。
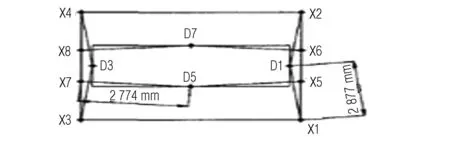
圖4 小車起升機構水平面投影圖
根據圖5可以推導出D1B1X1構成一個直角三角形,從而計算出X1至D1的水平距離。
取X1X2的中點B1,連接D1B1,D1B1垂直于X1X2,得到直角三角形D1B1X1。如圖5所示,D1B1=(5 540-4 750)÷2 = 395 mm,X1B1=5 700÷2=2 850 mm。

3鋼絲繩垂直方向夾角計算
在通過1#繩的縱向平面上可以得到一個三角形。
吊具距小車架高度為h=25 000-2 000-2 600=20 400 mm(集裝箱標高為2 600 mm,超高箱為2 896 mm)。

標箱寬度為2 438mm,取一半為1 219mm。5層超高集裝箱高度為2 896÷5=14 480mm,則建立三角形如圖5所示。
則:h1=2 896÷5-2 000-2 600=9 880mm
根據公式tgα=(X+1 219)÷h1,推導得出X=170mm。
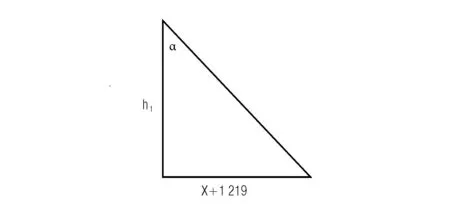
圖5 鋼絲繩垂直方向夾角三角形圖
考慮到場地在小車方向上有3‰的坡度,假設堆碼的全部是5層超高箱,則高度為2 896÷5=14 480 mm,取整為15 m,則在第5層集裝箱向內偏移量為45 mm,再加上定位精度為20 mm,所以Xmax=170+45+20=235 mm,其中,堆塊中9匹集裝箱中第5匹為垂直擺放,沒有傾斜,因此只加一次偏移量。
4結語
綜上分析計算,ASC小車方向上集裝箱間距為400 mm,可以滿足裝卸安全要求,同時保持高效性。
參 考 文 獻
[1]伊志剛. RTG八繩起升機構的缺陷及改善方法[J]. 港口裝卸, 2010(05):17-18.
Selection Analysis for Container Interval in Automatic Stack
Qingdao Qianwan Intelligent Container Terminal Co.,Ltd.,Xiu FangqiangLu XiangdongLi Bo
Abstract:This paper analyze the space between lontainers in automatic port under the eighr rope sling cases, raised a rnodel and a formula to a calculate the angle between wirerope and vertical. direction. The safety and efficiency of container handling production was guaranteed by analyzing a reasonable space design method.
Key words:eight rope rolling structure; wire rope; safety; efficiency
DOI:10.3963/j.issn.1000-8969.2016.02.011
收稿日期:2015-11-20
修方強: 266000, 山東省青島市保稅區同江路567號
猜你喜歡
現代儀器與醫療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
建材發展導向(2021年14期)2021-08-23 00:57:04
建材發展導向(2021年23期)2021-03-08 01:05:44
裝備制造技術(2020年4期)2020-12-25 05:25:56
科技傳播(2019年22期)2020-01-14 03:05:32
活力(2019年17期)2019-11-26 00:42:18
基層中醫藥(2018年6期)2018-08-29 01:20:20
上海農業學報(2017年3期)2017-04-10 12:39:18
信息安全與通信保密(2016年3期)2016-08-23 01:23:46