基于Zigzag塊掃描的光柵化算法設計與實現
2016-05-30 18:32:18聶瞾田澤馬城城
科技風
2016年7期
聶瞾 田澤 馬城城

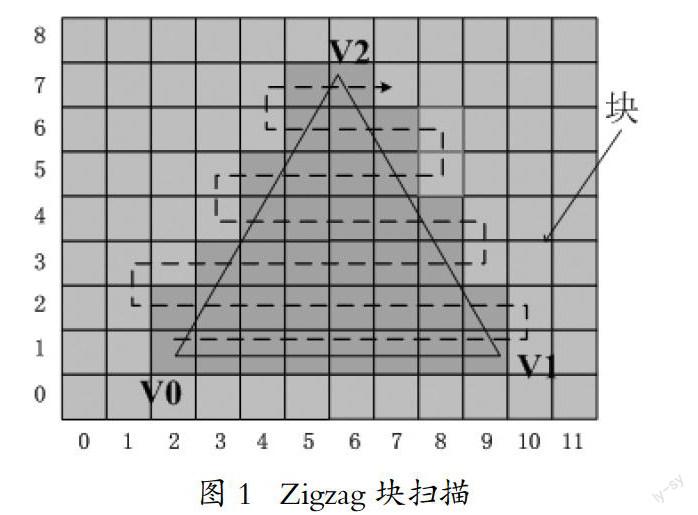
摘 要:光柵化是圖形處理器的關鍵單元,實現幾何圖元到片段的轉換,其功能、性能決定了圖形處理器的優劣。傳統的光柵化方法大多采用線掃描方式,利用線填充算法在水平或豎直方向填充像素,計算過程復雜、資源占用量大,不適用于對硬件資源與芯片面積有極大限制的嵌入式圖形處理器設計。文中在分析Zigzag掃描原理的基礎上,提出一種基于Ziazag塊掃描的光柵化算法,該算法計算過程簡練、資源消耗少。通過算法仿真平臺的驗證,功能正確、性能較傳統線掃描算法提升30%以上、資源占用大大降低,滿足圖形處理器設計要求。
關鍵詞:光柵化;塊掃描;Zigzag掃描
中圖分類號:TP301 文獻標識碼:A
在圖形應用快速發展的背景下,復雜的3D圖形應用需求與日俱增。圖形處理器(Graphic Processing Unit,GPU)作為顯示系統的核心,以硬件加速的形式實現了3D圖形繪制,其功能、性能直接決定了圖形繪制的質量和速度,在計算機系統中的作用日益提高。
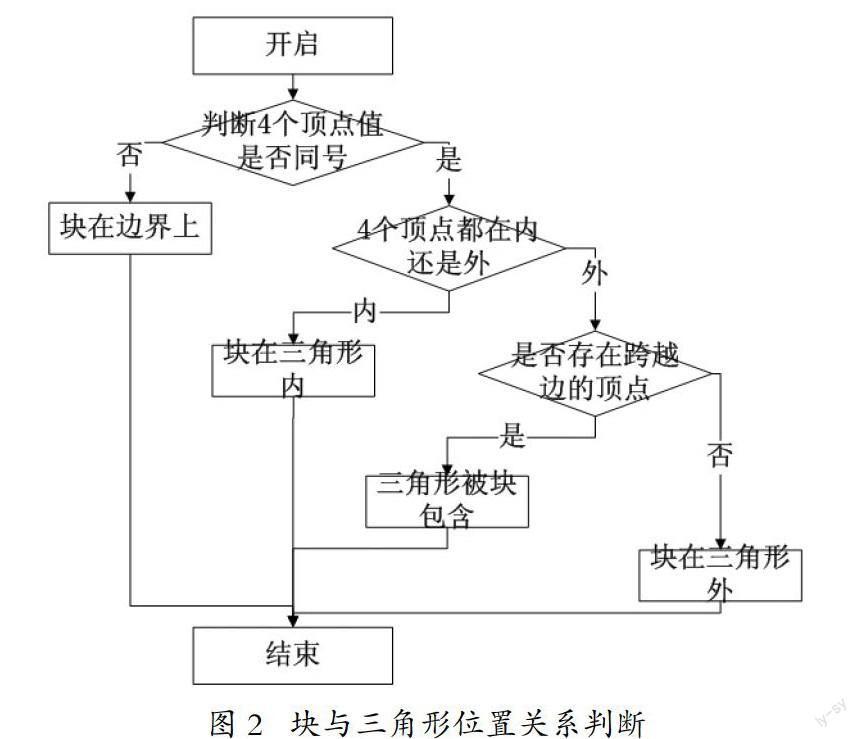
光柵化作為圖形處理器的關鍵單元,是將幾何圖元轉換為片段的重要過程,決定圖形繪制的效率和效果,是影響圖形處理器功能、性能的重要因素。傳統光柵化單元大多采用線掃描實現,如:Bresenham算法、DDA算法等,此類算法實現需占用大量運算資源和較多的存儲資源[ 1 ]。然而,嵌入式圖形處理器設計對硬件資源與芯片面積都有著極大的限制要求。基于塊掃描的光柵化方法應運而生,塊掃描光柵化將幾何圖元分割成以塊為單元的集合,以塊為單位進行像素處理,充分利用了圖形數據的局部性原理,大大提高了像素生成和處理效率。……
登錄APP查看全文
