基于AVR單片機的GPS導航小車設計
2016-05-30 05:28:53黃睿
寧波職業技術學院學報 2016年2期
黃睿
摘 要: 首先對基于單片機的GPS導航小車進行了整體結構設計,說明了小車模型的意義,實現自動行駛功能;其次分別介紹了單片機控制器、GPS模塊、無線傳輸模塊和小車模型等硬件部分;再次對系統軟件設計做了詳細說明;最后對設計做了總結,實現了預期目標。
關鍵詞: GPS導航; AVR單片機; 無線傳輸; 自動行駛
中圖分類號: TP 967.1 文獻標志碼: A 文章編號: 1671-2153(2016)02-0086-03
0 引 言
GPS是英文Global Positioning System(全球定位系統)的簡稱,起源于美國并廣泛應用于軍事戰爭。近年來隨著GPS技術的發展,其應用領域逐漸多元化[1],在國民經濟生產中也發揮著重要作用,對于GPS技術在汽車方面的應用也成為了目前熱門研究方向之一。隨著家用汽車的普及、大氣污染的日益加劇、惡劣環境下的自動駕駛功能就格外重要,而利用GPS導航恰恰可以解決這一難題。本文以自動導航小車為研究模型,探討了車輛監控、自動駕駛的可行性,旨為工業化應用提供借鑒。
1 系統設計
本系統從功能上可以分為三個部分:定位、通訊和監控。在對小車GPS定位以后,通過無線網絡進行數據傳輸,獲取有效數據,即坐標和運行狀態。GPS信號發送至GPS接收機,然后通過硬件實現信號處理,將處理后的信號發送到單片機控制端,提取數據,經過與預設值的比對和算法控制,實現小車的自動導航行駛。系統設計框圖如圖1所示。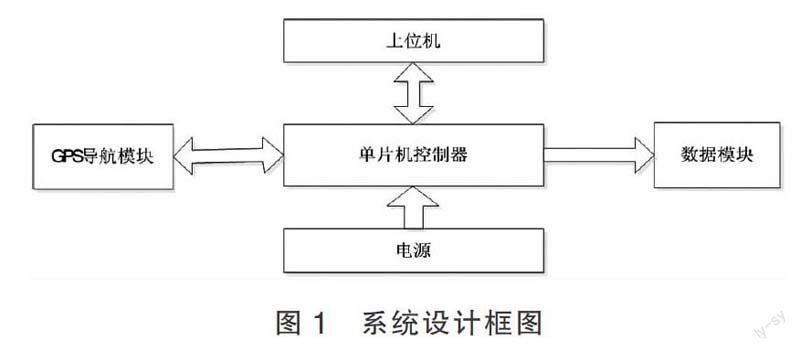
2 硬件設計
2.1 AVR單片機控制器
AVR是美國Atmel公司生產的增強RISC內在Flash的高性能8位單片機[2],它的串口可以同時與多模塊通信,片內Flash程序存儲器集成度非常高,可以大大減少外圍元器件的使用,提高系統性能。這里選用AVR系列中性能最強大的ATmega128芯片[3],該芯片是一種性能高、功耗低的處理器,擁有64個引腳,可重復編程的Flash空間為128kb,4kb EEPROM,4kb內部SRAM[4]。具有優秀的RISC結構,內部有易失性的數據存儲器和程序存儲器、8路10位ADC,含有2個8位定時器/計數器、2個16位定時器/計數器、2路8位PWM和SPI,JTAG,USART等數據接口。
2.2 GPS模塊
GPS模塊采用環天BR-355,它具特殊輕巧造型及100%防水設計,使用SiRF Star III 芯片組加上內建的主動型陶瓷天線讓定位更為精準,特別適合配合各種戶外活動時使用,防滑的底部可方便運用在各種車輛、船只及航空器。小車通過GPS模塊實現定位功能,GPS模塊中核心單元為GPS接收機,GPS接收機在工作狀態時會持續接收GPS導航定位信息,并將數據計算后通過串口上傳到計算機中。GPS接收機包括主機和外設兩部分。主機主要由射頻RF、通信信道、數據存儲與計算三大部分組成。外接設備主要包括電源、GPS天線、前置放大器和顯示器。其結構框圖如圖2所示。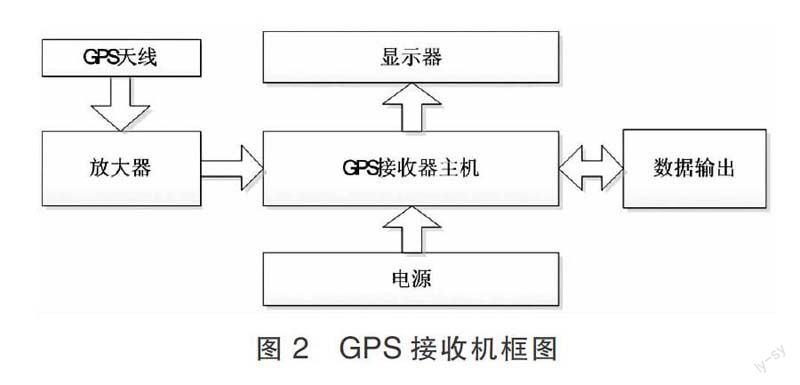
圖2中,GPS模塊通過天線接收衛星定位信號[5],提供對應數據,起到實時監控小車狀態的作用,并把數據送給單片機控制器,通過程序的編譯進行數據處理。
2.3 無線傳輸系統
整個監控系統中,上位機和單片機控制器以無線通信的方式傳輸數據。上位機通過無線傳輸模塊給單片機發送控制指令,以及完成數據交換。系統框圖如圖3所示。
本系統采用AVR單片機和nRF24L01無線芯片,nRF24L01是一款工作在2.4~2.5GHz世界通用ISM頻段的單片機無線收發器芯片,其具有數據傳送量大、抗干擾能力強、穩定性好、耗能低等優點。通過單片機的10個I/O接口直接與nRF24L01相連。AVR單片機主要完成數據的采集和處理,向nRF24L01發送數據并且接收上位機通過nRF24L01傳送過來的數據。無線芯片電源使用3.3 V供電,決定nRF24L01模塊工作模式的引腳分別與單片機的相應I/O控制口相連,保證正常工作狀態下,nRF24L01的工作模式可以由單片機內實時運行的程序來決定。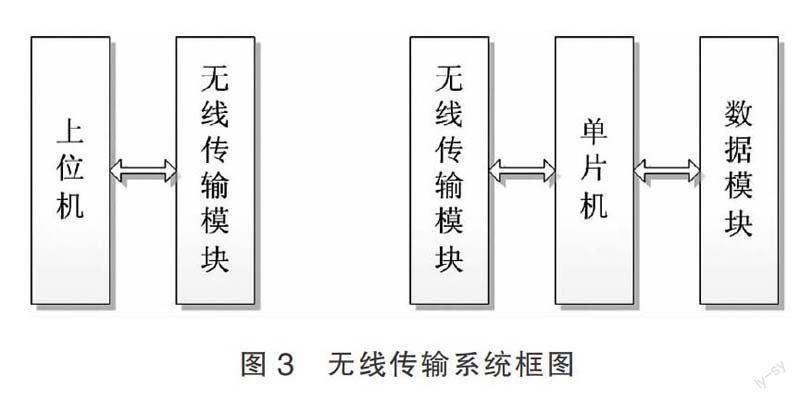
2.4 導航小車
本研究采用小車為自主組裝模型,根據實驗需求將車載模塊安裝在前驅小車模型內,通過單片機對集成芯片L298N的控制。L298N是一種雙H橋電機驅動芯片,其中每個H橋可以提供2A的電流,由IN1~IN4引腳接收單片機的高低電平控制信號,ENA和ENB為使能端。用兩個小電機分別連接小車的左前輪和右前輪,單片機指令控制電機的正傳與反轉,實現小車的運行狀態調整。兩個電機采用的是普通直流電機,其結構簡單、調速性能好、過載能力強、可調范圍寬,能夠滿足頻繁切換電動機運行狀態的實驗需求。
3 軟件設計
通過GPS模塊來采集小車運行信息,根據參數對比,判斷小車運行狀態是否正常:如果符合預設值,保存數據并繼續監控;反之,檢查無線通信模塊是否正常,如果有問題,返回初始狀態,如果通訊無問題,報告給控制端進行調節。具體流程圖如圖4所示。
系統初始化主要包括控制器串行通信端口重點初始化、顯示器初始化、GPS模塊和無線模塊初始化等。GPS數據先后經過接收、解析和顯示三個處理階段。系統采用的調試軟件為ATMEL AVR Studio,該軟件具有語言編譯、程序下載、軟件仿真和硬件仿真等功能,是與AVR單片機配套的集成環境匯編與開發調試軟件。
系統的軟件部分在自動控制原理中可視為一個閉環系統,根據小車實時的信息控制小車的運行狀態,每次調整后會運行一個周期,然后進行第二輪的數據采集,判定以及小車的控制,直至達到系統平衡狀態。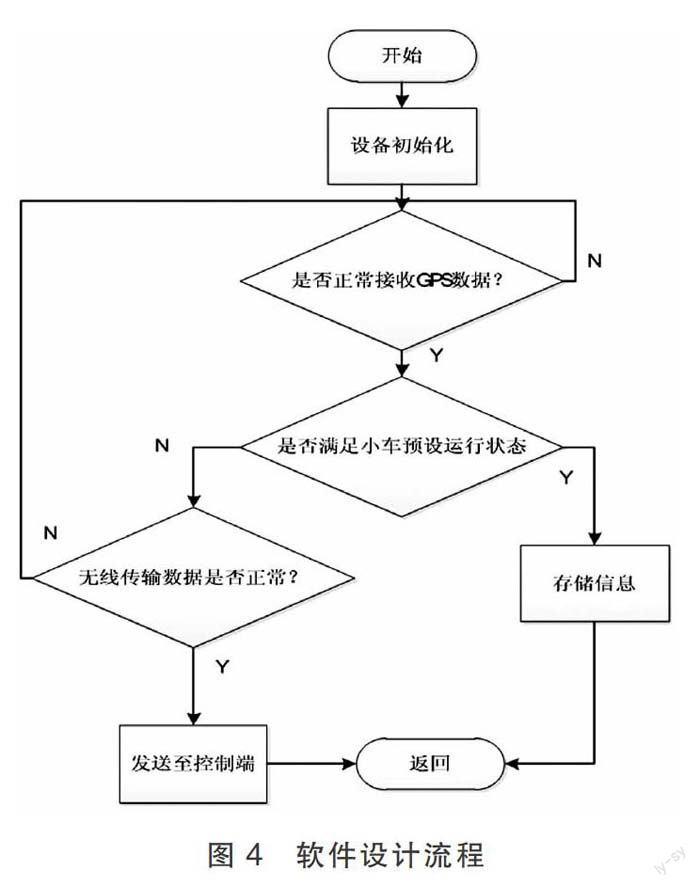
4 結束語
本文以GPS自動導航小車為模型,探索了車輛監控、自動駕駛的可行性。設計結果基本實現預期目標,但是在系統的精確性和快速性還有待改善。在以后的實驗中,將會以多點監控為目標,實現群體控制。
參考文獻:
[1] 白雪,徐雷鈞,劉國海,等. 基于單片機的GPS定位信息采集系統[J]. 微計算機信息,2008,24(8):228-229.
[2] 宋建國. AVR單片機原理及應用[M]. 北京:北京航空航天大學出版社,1998.
[3] 劉海成. AVR單片機原理及測控工程應用[M]. 北京航空航天大學出版社,2008:4-5,72—75.
[4] 王勇. 基于AVR單片機的一體化GPS接收機設計[J].自動化儀表,2008(29):65-67.
[5] CHADIL N,RUSSAMEESAWANG A.KEERATIWINTAKORN PHONGSAK.Real-time tracking management system using GPS,GPRS and Google Earth[R]. 5th International Conference on Electrical Engineering/Electronics,Telecommunications and Information Technology,Thailand,2008:393-395.
(責任編輯:徐興華)