基于模糊模式的水箱水位控制系統
2016-05-30 05:28:53王建珍
寧波職業技術學院學報 2016年2期
王建珍
摘 要: 設計了一種基于模糊模式的水箱水位控制系統,對當前水位偏差和水流的速度通過模糊規則進行模糊推理,得出最佳的閥門開啟大小和速度,從而控制水位。Matlab仿真結果表明,該系統能快速控制水位達到設定值。
關鍵詞: 模糊控制; 水位; Matlab仿真; 響應
中圖分類號: TP 273+.4 文獻標志碼: A 文章編號: 1671-2153(2016)02-0089-03
0 引 言
為了滿足生產生活的需要,在鍋爐、熱水器等容器中常常需要控制水位恒定于設定值,但是容器中的水何時流出、流出量多少,又是實時隨機變化的,難以建立一個數學模型來表示水流出的情況[1],因此無法很好地實現水位的自動控制。在此情況下,采用模糊控制的方法可以較好地解決這一問題。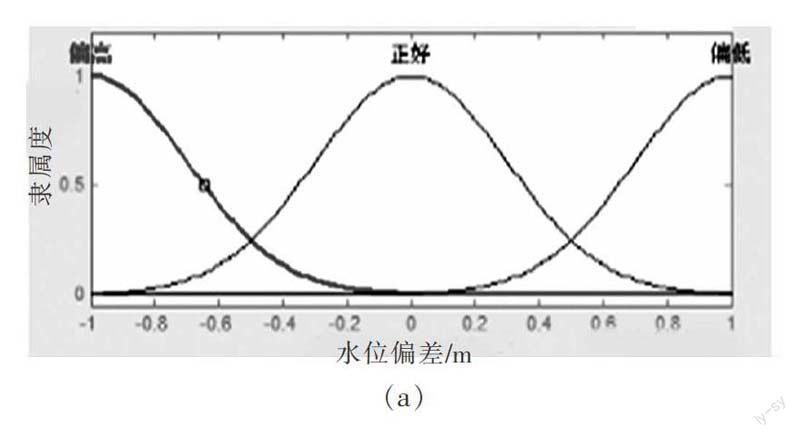
模糊控制是在模糊集合理論、模糊邏輯推理基礎上建立起來的一種控制方法,它可以模擬人的思維方式[2]。模糊控制系統的核心和關鍵是模糊控制器,模糊控制器的性能直接影響水箱水位控制系統的性能。
1 模糊控制器的設計
水箱水位取決于水箱閥門的開啟大小和速度,而水箱閥門的開啟大小和速度又取決于水位偏差(設定水位減去實際水位)和水的流速[3],所以本模糊控制器以水位偏差和水的流速為輸入,以閥門為輸出。輸入變量水位偏差的模糊論域為[-1 1],其模糊子集為偏高 、正好、 偏低,其拐點參數分別為[0.3 -1]、[0.3 0] 、[0.3 1] ;輸入變量水的流速模糊論域為[-0.1 0.1],其模糊子集有偏慢、正好、偏快,其拐點參數分別為[0.03 -0.1]、[0.03 0]、[0.03 0.1];輸出變量閥門的模糊論域為[-1 1],其模糊子集有快關、慢關、不變、慢開、快開,其拐點參數分別為[-1 -0.9 -0.8]、[-0.6 -0.5 -0.4]、[-0.1 0 0.1]、[0.2 0.3 0.4]、[0.8 0.9 1],兩輸入變量的隸屬函數類型均為高斯型,輸出變量的隸屬函數類型為三角形。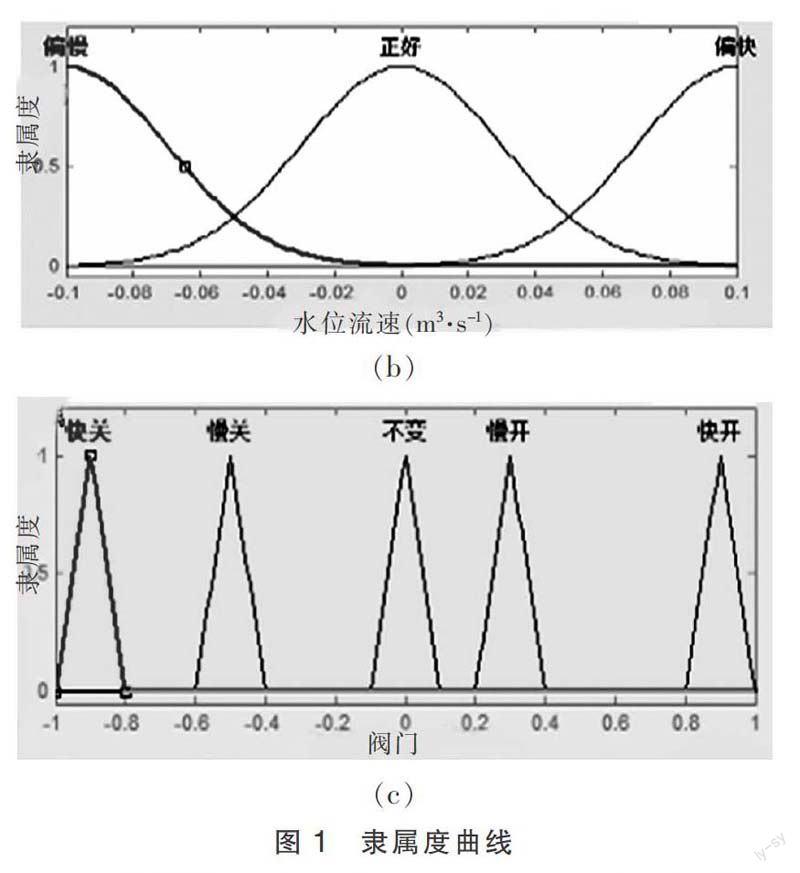
在Matlab中,建立一個mamdani型的結構文件,其輸入變量為“水位偏差”和“水的流速”,輸出變量為“閥門”,其“與”、“或”、“蘊含”、“綜合”、“清晰化”算法分別設為取小、取大、取小、取大、面積中心法。分別得到水位偏差、水的流速和閥門的隸屬度曲線如圖1所示。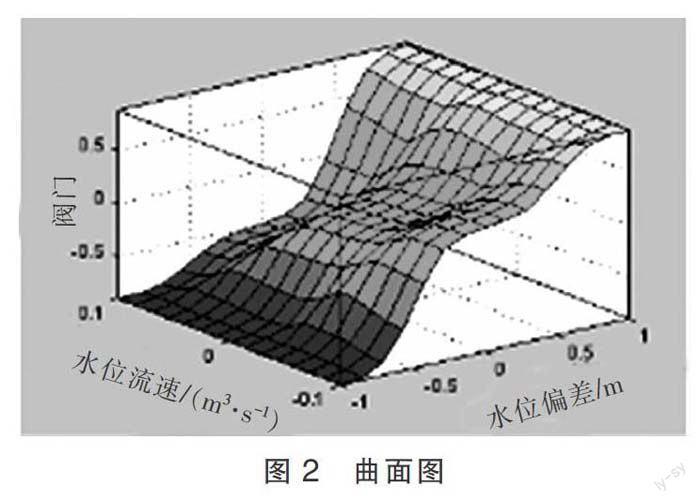
根據操作經驗得出閥門存在如下控制規則[4]:
如果水位偏差偏低,應快開閥門;
如果水位偏差正好,閥門開度應保持不變;
如果水位偏差偏高,應快關閥門;
如果水位偏差正好而水的流速偏慢,應慢開閥門;
如果水位偏差正好而水的流速偏快,應慢關閥門;
在Matlab的Rule編輯器中編輯出如下5條規則語句:
if(水位偏差 is偏低)then(閥門 is 快開);
if(水位偏差 is正好)then(閥門 is 不變);
if(水位偏差 is偏高)then(閥門 is 快關);
if(水位偏差 is正好)and(水的流速 is 偏慢)then(閥門 is慢開);
if(水位偏差 is正好)and(水的流速 is 偏快)then(閥門 is慢關);
其曲面圖如圖2所示。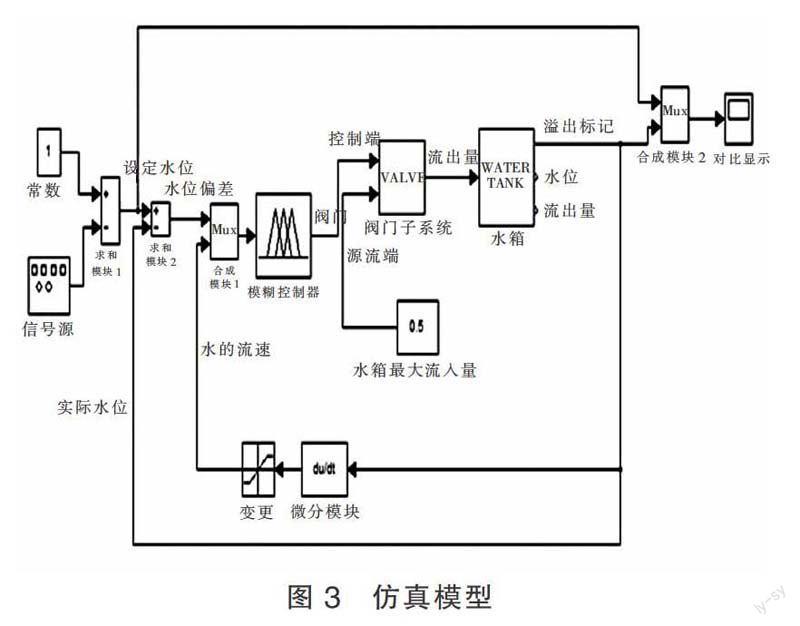
2 仿真分析
用Matlab建立仿真模型[5],結果如圖3所示。圖3中,閥門子系統和水箱模塊均為封裝子系統,其內部結構分別如圖4和圖5所示。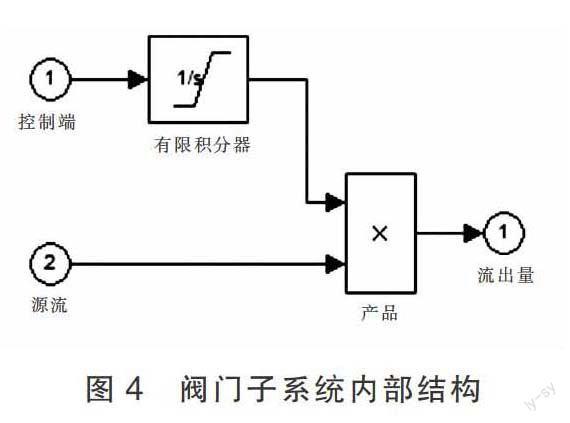
圖3中,信號源輸出方波,方波的頻率設為0.1 rad/s,幅度為0.5,常數模塊輸出常數1,常數1和方波經求和模塊1相加后輸出零點上移一個單位的方波,此為設定水位;在求和模塊2中設定水位和反饋回來的實際水位相減,輸出水位偏差,水箱輸出的水位經微分模塊處理后得到水的流速, 水位偏差與水的流速作為兩個分量在合成模塊1中合成為一個向量輸入到模糊控制器中,模糊控制器的輸出量閥門輸入到閥門子系統去控制閥門的開啟大小和速度,從而控制水箱水位。在合成模塊2中輸入設定水位和實際水位,再通過對比顯示器顯示輸出方波信號與響應信號溢出標記的比較。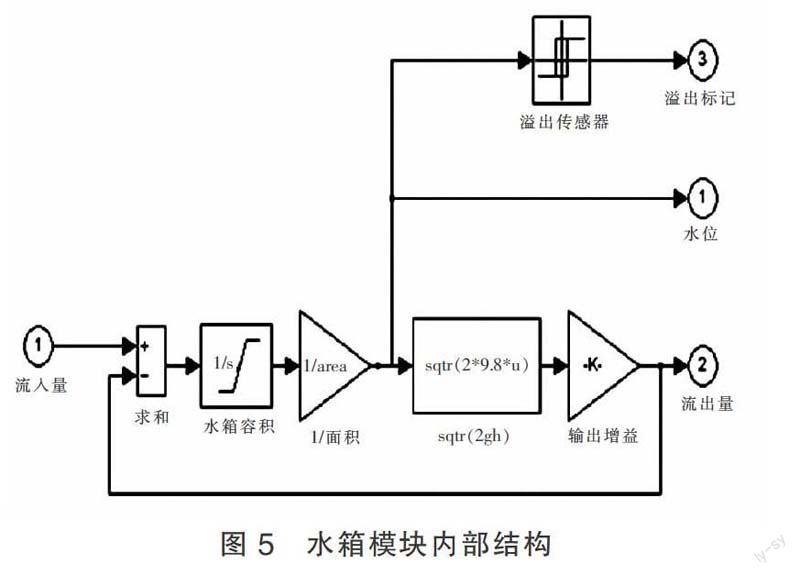
圖6為對比顯示器上輸出的波形。圖6中,方波信號代表設定水位,另一條信號為水箱輸出的響應信號,代表實際水位。由圖6可以看出,響應信號能在很短時間內接近方波信號,對方波信號的跟隨性較好,表明水箱能在很短的時間內達到設定的水位,從而保持水位的恒定。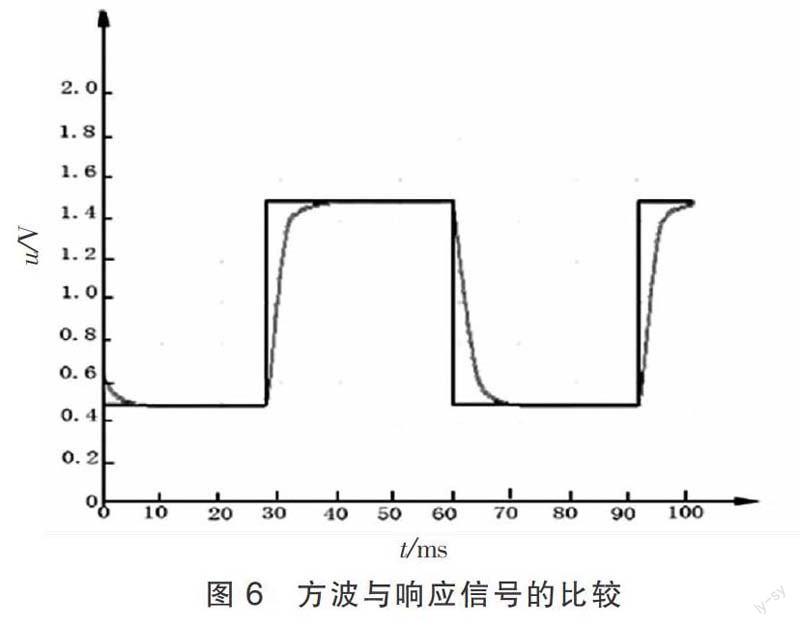
3 結 論
容器中水流出情況變化無常,很難建立一個數學模型來表示水流出情況,而模糊控制無需建立數學模型,用水位偏差和水的流速通過模糊控制規則去控制閥門的開啟大小和速度。通過仿真分析可知,本文所設計的模糊控制系統具有響應快速穩定的特點,能很好地控制水位恒定于設定值。
參考文獻:
[1] 黃杰,秦補枝. 基于模糊控制的智能循跡小車的設計[J]. 制造,2010(20):148-149.
[2] 石辛民,郝整清. 模糊控制及其MATLAB仿真[M]. 北京:清華大學出版社,北京大學出版社,2008:53.
[3] 劉帥,齊向東,王興. 基于PLC的模糊恒壓供水系統[J]. 工業控制計算機,2010(12):51-54.
[4] 喬路. 交叉路口交通燈實時模糊控制系統研究[J]. 電子技術與軟件工程,2015(5):190.
[5] 黃春香. 空氣加濕器模糊控制系統的設計[J]. 科技創新與應用,2015(34):80.
(責任編輯:徐興華)