Nachi MZ04機器人在智慧工廠中的運動仿真與軌跡規(guī)劃
2016-05-30 19:23:22胡丹丹戴花林
科技風 2016年11期
胡丹丹 戴花林
摘 要:本文在Matlab環(huán)境下,利用機器人運動學原理對Nachi MZ04機器人的參數(shù)進行運動分析,并利用Matlab Robotic Toolbox對Nachi MZ04機器人進行三維建模、運動學分析,通過實驗證明了其正確性;在智慧工廠應用中進行了軌跡規(guī)劃,并通過規(guī)劃運動的動態(tài)圖、關節(jié)曲線圖以及機器人末端軌跡得出達到了預期效果的結論。
關鍵詞:Matlab Robotic Toolbox;機器人運動學;Nachi MZ04;智慧工廠
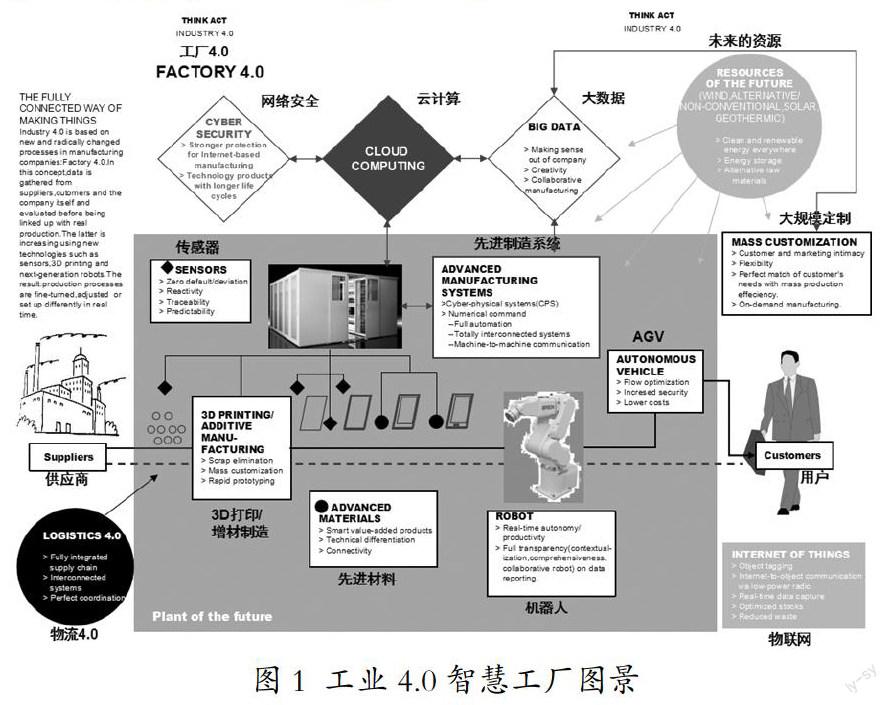
如圖1所示為工業(yè)4.0智慧工廠圖景,智慧工廠指向的是智能聯(lián)網(wǎng)系統(tǒng):信息技術(IT)與自動化技術(AT)與傳統(tǒng)生產(chǎn)環(huán)境相結合,生成一個互聯(lián)的制造系統(tǒng)網(wǎng)絡,它們在本質(zhì)上是物理的,但又具有聯(lián)網(wǎng)通訊的功能,目的是通過通訊和智能聯(lián)網(wǎng)功能使得生產(chǎn)過程更加靈活、高效并具有可持續(xù)發(fā)展性,從而提高工業(yè)競爭力。
從圖中可以看出,機器人在智慧工廠中扮演著重要的角色,本文基于Matlab Robotic Toolbox對Nachi MZ04機器人進行運動仿真并在智慧工廠中進行軌跡規(guī)劃。
1 Nachi MZ04機器人的參數(shù)設計
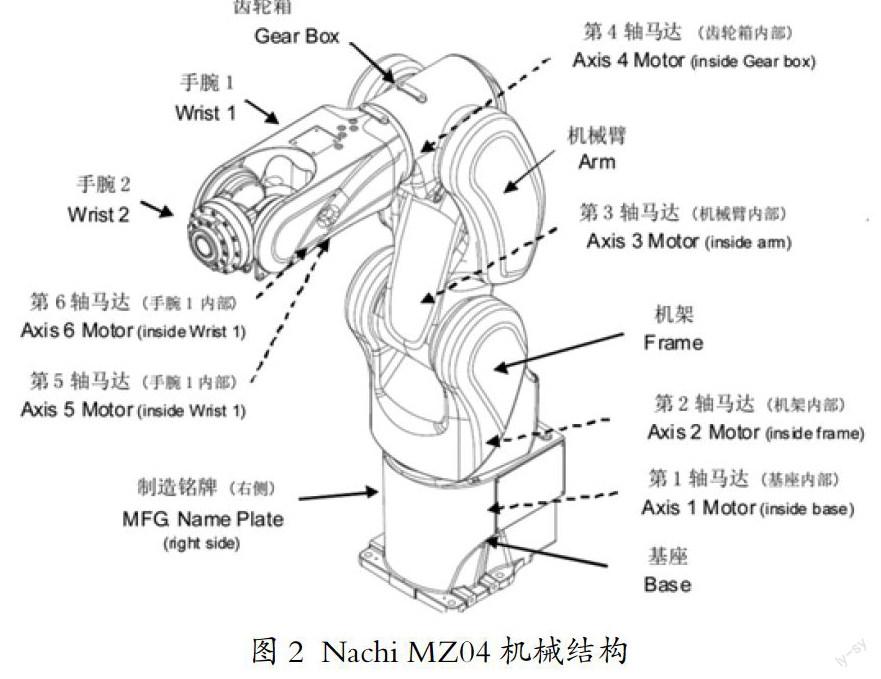
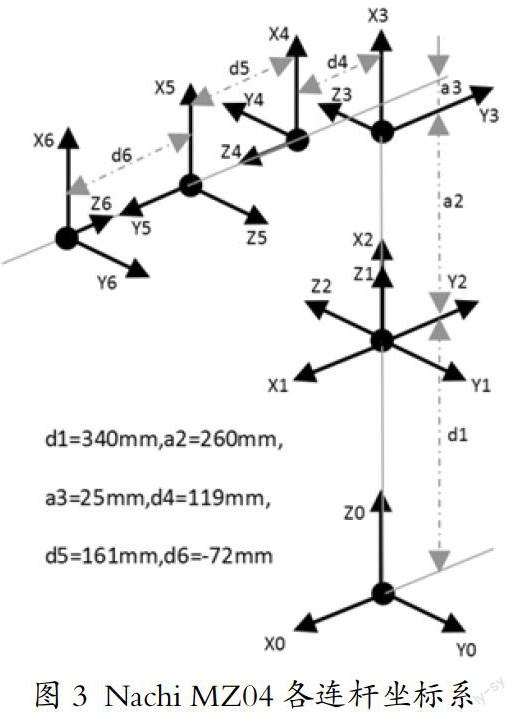
MZ04機器人是由Nachi(那智)公司生產(chǎn)的6自由度串聯(lián)結構機器人,它由6自由度旋轉關節(jié)構成,其示意圖如圖2所示,其中,第1、2、3軸確定手腕參考點位置,第4、5、6軸確定手腕的方位。根據(jù)機器人自身參數(shù)和Craig參考坐標系建立約定建立各連桿坐標系如圖3所示。
當Nachi MZ04機器人處于初始狀態(tài)時,相應的連桿參數(shù)表如表1所示。其中a2=260mm,a3=25mm,d1=340mm,d4=119mm,d5=161mm,d6=-72mm。參數(shù)說明:
桿件長度ai-1為從zi-1到zi沿xi-1測量的距離;
扭轉角?琢i-1為從zi-1到zi沿xi-1旋轉的角度;
橫距di為從xi-1到xi沿zi測量的距離;
關節(jié)角?茲i為從xi-1到xi沿zi旋轉的角度。
2 Nachi MZ04機器人運動分析
機器人學中關于運動學和動力學最常用的描述方法是矩陣法,這種數(shù)學描述是以四階方陣變換三維空間的齊次坐標為基礎的,矩陣法、齊次變換等概念是機器人學研究中最重要的數(shù)學基礎,利用Matlab Robotic Toolbox中的transl、rotx、roty和rotz函數(shù)可以非常容易地實現(xiàn)用齊次變換矩陣表示平移變換和旋轉變換。例如機器人繞x軸平移了300mm的齊次變換可表示為:T=transl(0.3,0,0);繞z軸旋轉了90°可以表示為T=rotz(pi/2);繞y軸旋轉90°,接著繞x軸旋轉-90°,再沿z軸方向平移500mm對應的齊次變換可表示為:T=transl(0,0,0.5)*rotx(-pi/2)*roty(pi/2)。Nachi MZ04機器人中六個關節(jié)均為旋轉關節(jié)。
3 MATLAB運動仿真
機器人是由多個連桿連接而成的,機器人關節(jié)分為旋轉關節(jié)和移動關節(jié)。創(chuàng)建機器人的兩個最重要的函數(shù)是:Link和SerialLink。根據(jù)圖3和表1中的參數(shù),可構建Nachi MZ04機器人仿真matlab程序并將仿真機器人(初始狀態(tài))繪制如圖4所示。
圖5為MATLAB中機器人控制面板,圖中,q1、q2、q3、q4、q5、q6分別為關節(jié)1至關節(jié)6的關節(jié)角,對應表1中的?茲1至?茲6,可通過調(diào)節(jié)圖中的滑塊來使關節(jié)轉動,就像實際操作機器人一樣,通過機器人自帶示教儀實際操作機器人各關節(jié)與在Matlab中仿真控制各關節(jié)進行對比,所得結果一致,從而驗證了仿真建模的正確性。
4 智慧工廠中Nachi MZ04機器人的運動軌跡規(guī)劃
在實際模擬智慧工廠中,Nachi MZ04機器人用于抓取工件,通過機器人自帶示教儀測量出起始點關節(jié)空間矢量qA(0,0,0,0,0,0)與目標點關節(jié)空間矢量qB(1.6,1.-2,0,0,0)的坐標,利用Matlab Robotic Toolbox中的關節(jié)空間規(guī)劃算法jtraj可以計算出需要的軌跡,并可在matlab中看到運動動態(tài)圖以判斷是否可行,圖6為Nachi MZ04機器人關節(jié)3的角位移、角速度、角加速度曲線,圖7為Nachi MZ04機器人末端運動軌跡。
5 結語
本文簡單介紹了智慧工廠,利用Matlab Robotic Toolbox對Nachi MZ04機器人建立了三維模型,分析了Nachi MZ04機器人的運動問題和軌跡規(guī)劃問題,通過示教儀操控機器人與Matlab仿真控制機器人各關節(jié)結果對比驗證了模型建立與運動分析的正確性,在Matlab中進行軌跡規(guī)劃時可以看到機器人運動的動態(tài)圖,各關節(jié)沒有運動錯位的情況出現(xiàn),由圖6可以看見關節(jié)能平穩(wěn)地由初始點運動至目標點,圖7可以看到機器人末端運動軌跡,達到了運動軌跡規(guī)劃的目的。
參考文獻:
[1] 蔡自興,謝斌.機器人學[M].第三版.北京:清華大學出版社,2015.
[2] 劉保住,蘇彥華,張宏林.MATLAB 7.0 從入門到精通[M].北京:人民郵電出版社,2015年2月第13次印刷.
[3] 羅家佳,胡國清.基于MATLAB的機器人運動仿真研究.廈門大學學報,2005年9月第44卷第5期:640-644.
作者簡介:
胡丹丹(1987-),女,漢族,江西南昌人,碩士研究生,高職講師,研究方向:機電一體化;
戴花林(1968-),女,漢族,湖南株洲人,本科,高職副教授,研究方向:電氣自動化。