基于機載捷聯慣導計算導彈初始姿態的算法
2016-06-01 05:58:02付書堂劉建團
航空兵器 2016年2期
陳 宇, 付書堂,劉建團
(1. 中國空空導彈研究院,河南 洛陽 471009; 2. 陸軍航空局駐洛陽地區軍事代表室,河南 洛陽 471009)
?
基于機載捷聯慣導計算導彈初始姿態的算法
陳宇1, 付書堂1,劉建團2
(1. 中國空空導彈研究院,河南 洛陽471009; 2. 陸軍航空局駐洛陽地區軍事代表室,河南 洛陽471009)
摘要:隨著慣導技術的發展,機載主慣導逐漸用捷聯慣導替代平臺式慣導,由此帶來了火 控系統計算導彈姿態算法的變化。本文研究了慣性導航系統算法,總結出基于機載捷聯主慣導的 導彈姿態算法。通過仿真驗證,該算法計算精度滿足要求,可以用于空空導彈導航系統初始化。
關鍵詞:空空導彈; 捷聯慣導; 初始校準; 導彈姿態; 算法設計
0引言

傳統的機載主慣導為平臺式慣導,用于空空導彈發射前的姿態計算方法非常成熟,經過大量飛行試驗驗證。 但是,機載平臺式主慣導逐漸被捷聯式主慣導替代[2]。 二者工作方式有較大的差異,因此,導彈發射前載機火控系統計算導彈姿態的算法也有所不同。
1坐標系說明
1.1慣性坐標系
原點O位于坐標系建立時刻載機下方地球海平面某點,三個坐標軸與地理坐標系的坐標軸相重合。OXI軸指向地理北向為正,OYI軸沿當地地垂線向上為正,OZI軸指向地理東向為正,稱為I系。 該坐標系在建立之后,各軸方向在空間保持不變,且相對慣性空間作勻速直線運動,其速度V近似等于
VZ=ωZ×RZ×cosφ
(1)
式中:ωZ為地球旋轉速度;RZ為地球半徑;φ為固定點的緯度。 慣性坐標系示意圖見圖1。
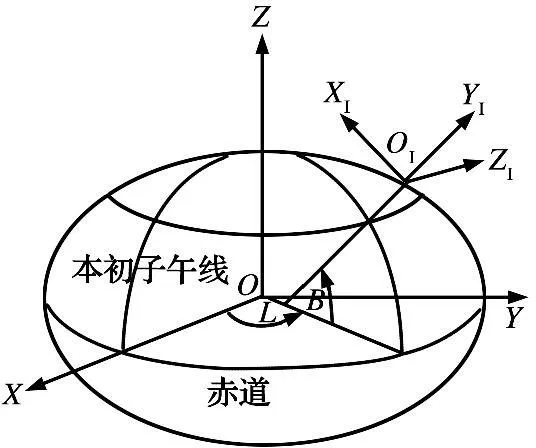
圖1慣性坐標系示意圖
1.2地理坐標系
原點O位于飛行器下方的海平面上,OXG軸指向北方,OYG軸指向天向。OZG軸與OXG軸、OYG軸構成右手坐標系,稱為G系。
1.3載機機體坐標系
該坐標系與導彈載機固聯,原點O位于載機慣性導航系統的安裝中心,OXA軸沿載機的縱軸方向并指向前方,OYA軸的方向向上。OXA軸、OYA軸、OZA軸構成右手坐標系,稱為A系。
載機在地理坐標系中的三個姿態角為: 方位角ψ、 俯仰角?、 橫滾角γ。 初始時刻機體系與地理系重合,則姿態角方向規定如下:ψ沿OYA軸轉動時逆時針角度為正; ?沿OZA軸轉動時逆時針角度為正;γ沿OXA軸轉動時逆時針角度為正。 上述定義均沿坐標軸方向向內看。
1.4導彈彈體坐標系
采用右手坐標系,坐標原點O為導彈質心,OXb軸沿導彈彈身軸線指向頭部為正,OYb軸在包含OXb軸的鉛垂平面內向上為正,OZb軸由右手定則決定,稱為b系。
2姿態算法設計

姿態矩陣用四元數表達非常方便。 導彈彈體坐標系相對慣性坐標系位置的變換四元數系數N需要通過兩次變換獲得。 首先計算載機機體坐標系相對于慣性系的轉換四元數N1(N01,N11,N21,N31) ,然后計算導彈彈體坐標系相對于載機機體坐標系的轉換四元數N2(N02,N12,N22,N32)。 最后得到
N=N1N2
(2)
2.1載機機體系相對于慣性系的轉換
在慣性坐標系建立時刻,慣性坐標系與當地地理坐標系G系重合[4]。 假設此時載機在地理坐標系中的三個姿態角分別是ψ0,?0,γ0,則
(3)
采用四元數的姿態表達式,則需要求解下面的方程:
(4)
式(4)中:
(5)
式中:ωx,ωy,ωz分別為機載陀螺測量的機體系內表達的角速度。 假設在計算周期內機體運動角速度保持不變,則式(4)的解可以寫為
(6)
式(6)中:
(7)
式中: σx,σy,σz為機體運動角速度在一個計算周期內的積分。
通過指數展開項,可得
N1k+1=N1krk
(8)
(9)
式(9)中:
(10)
(11)
式(10)~(11)中:
(12)

仿真表明,當機體運動角速度不大于285 (°)/s、 數據更新周期小于20ms時,采用四階算法,則姿態漂移誤差小于0.2 (°)/h。
2.2導彈彈體系相對于載機機體系的轉換
由于空空導彈在載機上懸掛時,導彈彈體坐標系與載機機體坐標系之間包括俯仰、 偏航以及橫滾方向均存在誤差角,因此必須先計算出導彈彈體坐標系相對于載機機體坐標系的轉換矩陣,后才能最終求得導彈彈體系相對于慣性系的轉換矩陣[6]。

需要說明的是,不同的載機、 不同的掛點,在兩個不同坐標系之間的誤差角Δψ,Δ?,Δγ均有差異。 對于同一架飛機,在不同飛行狀態下機翼變形不一樣,誤差角也會發生變化,如載機機動過載、 飛行馬赫數、 掛裝載荷等因素都會對Δψ,Δ?,Δγ產生影響。
2.3導彈彈體系向慣性系的轉換
導彈彈體系向慣性系的轉換矩陣為
(13)

N=N1N2
(14)
計算過程中四元數的運算要按照四元數的運算法則進行。
至此,基于機載捷聯慣導的彈體系向慣性系的轉換矩陣算法已經討論完畢。
3計算仿真結果
根據上述算法,編程進行仿真。 仿真中機載捷聯陀螺的漂移取0.01 (°)/h, 角速度測量輸出周期取20ms,機體系向慣性系轉換的四元數更新取四階算法。 仿真結果如圖2所示。

圖2誤差漂移仿真結果
仿真顯示,在100 s的時間里該算法引起的漂移為0.2′,折算為0.12 (°)/h。 可見該算法計算精度滿足空空導彈需要[7]。
4結論
針對機載捷聯式主慣導不同于平臺式主慣導的工作特點,利用捷聯慣導姿態更新算法,考慮彈體在飛機上的安裝誤差角以及機翼變形等因素,可以在火控計算機上實現實時計算空空導彈姿態的目的,空空導彈在發射前可以據此完成傳遞對準。 選用四階算法,使計算精度得到保證。
參考文獻:
[1] Titterton D V, Weston J L. 捷聯慣性導航技術[M]. 2版. 張天光,王秀萍,王麗霞,等譯.北京: 國防工業出版社,2007.
[2] 袁信,俞濟祥,陳哲. 導航系統[M] .北京: 航空工業出版社,1993.
[3] Savage P G. Strapdown Inertial Navigation Integration Algorithm Design, Part I: Attitude Algorithms[J]. Journal of Guidance, Control, and Dynamics, 1998, 21(1):19-28.
[4] 周本川,魯浩.空空導彈捷聯慣導系統極區導航算法設計[J]. 航空兵器,2013(6): 9-11.
[5] 魯浩,位曉峰,徐劍蕓, 等. 彈載捷聯慣導空中傳遞對準中火控匹配信息精度研究[J]. 彈箭與制導學報,2011, 31(5): 61-64.
[6] 陳凱,魯浩,趙剛, 等. 傳遞對準姿態匹配算法的統一性[J]. 中國慣性技術學報,2008, 16(2):127-131.
[7] 李峰,王新龍,王起飛. 空空導彈目標截獲概率研究[J]. 電光與控制,2010, 17(8):15-20.
Initial Attitude Algorithm of Missile Based on Airborne SINS
Chen Yu1,Fu Shutang1,Liu Jiantuan2
(1. China Airborne Missile Academy,Luoyang 471009,China;2.Military Representative Office of Army Aviation Bureau in Luoyang, Luoyang 471009, China)
Abstract:With the development of inertial navigation technology,airborne platform inertial navigation system is substituted gradually by SINS,which causes the change of missile attitude algorithm calculated by fire control system. Research on the inertial navigation system algorithm is done and the attitude algorithm base on airborne SINS is summarized. The calculation accuracy of the algorithm meets the requirement and it can be used in the initialization of air-to-air missile navigation system.
Key words:air-to-air missile; SINS; initial alignment; missile attitude; algorithm design
中圖分類號:V249. 32 + 2
文獻標識碼:A
文章編號:1673-5048( 2016) 02-0029-03
作者簡介:陳宇(1982-),男,廣西桂林人,工程師,研究方向為導航控制系統設計。
收稿日期:2015-07-18
DOI:10.19297/j.cnki.41-1228/tj.2016.02.005
