智能手機(jī)車輛異常駕駛行為檢測(cè)方法
2016-06-02 08:13:10周后飛劉華平石紅星
智能系統(tǒng)學(xué)報(bào) 2016年3期
關(guān)鍵詞:智能手機(jī)
周后飛,劉華平,石紅星
(1.重慶交通大學(xué) 土木工程學(xué)院,重慶400074; 2.清華大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)系,北京 100084; 3.清華大學(xué) 智能技術(shù)與系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100084; 4.北京城建道橋建設(shè)集團(tuán)有限公司,北京100080)
?
智能手機(jī)車輛異常駕駛行為檢測(cè)方法
周后飛1,2,3,劉華平2,3,石紅星4
(1.重慶交通大學(xué) 土木工程學(xué)院,重慶400074; 2.清華大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)系,北京 100084; 3.清華大學(xué) 智能技術(shù)與系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100084; 4.北京城建道橋建設(shè)集團(tuán)有限公司,北京100080)
摘要:將智能手機(jī)作為車輛異常駕駛行為檢測(cè)工具,設(shè)計(jì)了一種車輛異常駕駛行為檢測(cè)方法和系統(tǒng)。系統(tǒng)通過獲取車載智能手機(jī)內(nèi)部的加速度傳感器數(shù)據(jù)、陀螺儀傳感器數(shù)據(jù)以及磁場(chǎng)傳感器數(shù)據(jù),經(jīng)坐標(biāo)旋轉(zhuǎn)和特征提取,并利用基于核方法極限學(xué)習(xí)機(jī)(核ELM)得到的駕駛行為在線分析算法,以實(shí)現(xiàn)能實(shí)時(shí)識(shí)別包括頻繁變道、頻繁變速及急剎車在內(nèi)的多種車輛異常駕駛行為,并在車輛出現(xiàn)異常駕駛行為時(shí)開啟報(bào)警語(yǔ)音。測(cè)試結(jié)果表明,基于核ELM算法的駕駛行為分類器性能比基于支持向量機(jī)(SVM)算法更好,提出的異常駕駛行為檢測(cè)系統(tǒng)能有效識(shí)別各種駕駛行為。
關(guān)鍵詞:智能手機(jī);異常駕駛行為檢測(cè);傳感器;核方法;極限學(xué)習(xí)機(jī);支持向量機(jī)
近年來(lái),國(guó)內(nèi)外研究人員相繼研究利用智能手機(jī)識(shí)別各種行為。目前,基于智能手機(jī)的模式識(shí)別研究主要集中在人體行為識(shí)別領(lǐng)域[1-6],但也有部分學(xué)者嘗試將智能手機(jī)應(yīng)用到車輛駕駛行為識(shí)別方面。其中,Dai等[7]將車載智能手機(jī)的加速度和方向傳感器數(shù)據(jù)作為車輛的運(yùn)行參數(shù)來(lái)檢測(cè)醉駕行為。Paefgen等[8]用車載智能手機(jī)傳感器信號(hào)來(lái)評(píng)估各類駕駛行為,但算法魯棒性較弱;Xu等[9]利用車載智能手機(jī)拍攝照片,開展了基于人眼圖像的疲勞駕駛檢測(cè)技術(shù)研究。Eren[10]等利用車載智能手機(jī)加速度傳感器、陀螺儀傳感器、磁場(chǎng)傳感器數(shù)據(jù)來(lái)識(shí)別車輛的駕駛行為,并把車輛駕駛行為分為了安全和不安全兩大類。Fazeen[11]等比較了車載智能手機(jī)的加速度傳感器數(shù)據(jù)和專業(yè)設(shè)備采集的車輛行駛過程中的加速度數(shù)據(jù),結(jié)果顯示,兩者高度吻合,車載智能手機(jī)的加速度傳感器數(shù)據(jù)可以用來(lái)表征車輛自身的加速度。在利用車載智能手機(jī)進(jìn)行交通事故檢測(cè)方面,李偉健等[12]通過設(shè)定手機(jī)加速度傳感器數(shù)值變化閾值來(lái)檢測(cè)車輛碰撞事故;趙龍等[13]在李偉健等基礎(chǔ)上,將基于單部車載手機(jī)的碰撞事故識(shí)別技術(shù)提升到基于多部車載手機(jī)。但文獻(xiàn)[11-13]均通過閾值法來(lái)進(jìn)行事故判斷,識(shí)別效果有待進(jìn)一步改善。可見,基于智能手機(jī)的駕駛行為識(shí)別研究還處于探索階段,研究工作有待進(jìn)一步推進(jìn)和完善。為此,本文開展了基于智能手機(jī)的車輛異常駕駛行為檢測(cè)技術(shù)研究。論文主要工作有:
1)利用智能手機(jī)實(shí)時(shí)采集車體運(yùn)動(dòng)狀態(tài),提出了異常駕駛行為檢測(cè)方法框架,并針對(duì)左變道、右變道、加速、減速、急剎車、正常行駛等6類駕駛行為分析了手機(jī)傳感器數(shù)據(jù)的特性;
2)設(shè)計(jì)了基于核ELM的駕駛行為在線分析算法和異常駕駛行為檢測(cè)算法;
3)開發(fā)了“車輛異常駕駛行為監(jiān)控系統(tǒng)”軟件,并在實(shí)際運(yùn)行中測(cè)試了其性能。
1方法框架
本文提出的異常駕駛行為檢測(cè)方法框架如圖1所示。
方法流程包括:
1)利用車載手機(jī)的運(yùn)動(dòng)狀態(tài)表征車體運(yùn)動(dòng)狀態(tài);
2)通過車載手機(jī)內(nèi)部的傳感器獲得手機(jī)的動(dòng)態(tài)參數(shù);
3)將獲得的手機(jī)動(dòng)態(tài)參數(shù)旋轉(zhuǎn)校正至在特定坐標(biāo)系下的數(shù)據(jù);
4)提取經(jīng)旋轉(zhuǎn)校正后的手機(jī)動(dòng)態(tài)參數(shù)的特征;
5)用分類器識(shí)別車載手機(jī)的運(yùn)動(dòng)狀態(tài),并在此基礎(chǔ)上識(shí)別車輛是否出現(xiàn)本文所定義的異常行為。
2車載手機(jī)數(shù)據(jù)分析
為分析車載手機(jī)在車輛不同駕駛行為狀態(tài)下的動(dòng)態(tài)參數(shù)特征,采集了手機(jī)在車輛加速、減速、左變道、右變道、急剎車、正常行駛等多種情況下的數(shù)據(jù),數(shù)據(jù)包括手機(jī)加速度傳感器數(shù)據(jù)A=[axayaz](其中,ax表示手機(jī)X軸的加速度,ay表示Y軸的加速度,az表示Z軸的加速度,單位m2/s)、陀螺儀傳感器數(shù)據(jù)G=[gxgygz](其中g(shù)x表示繞手機(jī)X軸的角速度,gy表示繞Y軸的角速度,gz表示繞Z軸的角速度,單位rad/s),以及數(shù)據(jù)采集時(shí)刻t。
數(shù)據(jù)采集過程中,手機(jī)按照手機(jī)體坐標(biāo)系Y軸正向向前與車頭正向平行,Z軸垂直于水平面向上的姿態(tài)放置(把這種放置姿態(tài)叫做“標(biāo)準(zhǔn)姿態(tài)”,采集的數(shù)據(jù)叫做“標(biāo)準(zhǔn)數(shù)據(jù)”)。手機(jī)體坐標(biāo)系如圖2所示。
采集數(shù)據(jù)同時(shí),人為標(biāo)定車輛的加速起始時(shí)間Tai(i=1,2,…)和終止時(shí)間Taj(j=1,2,…)、減速起始時(shí)間Tdi(i=1,2,…)和終止時(shí)間Tdj(j=1,2,…)、左變道起始時(shí)間Tli(i=1,2,…)和終止時(shí)間Tlj(j=1,2,…)、右變道起始時(shí)間Tri(i=1,2,…)和終止時(shí)間Trj(j=1,2,…),急剎車起始時(shí)間Tsi(i=1,2,…)和終止時(shí)間Tsj(j=1,2,…)。
對(duì)比手機(jī)內(nèi)部存儲(chǔ)的時(shí)間t和人為標(biāo)定的駕駛行為起始時(shí)間和終止時(shí)間,提取從Tai(i=1,2,3…)到Taj(j=1,2,…)、Tdi(i=1,2,…)到Tdj(j=1,2,…)、Tli(i=1,2,…)到Tlj(j=1,2,…)、Tri(i=1,2,…)到Trj(j=1,2,…)和Tsi(i=1,2,…)到Tsj(j=1,2,…)時(shí)間段內(nèi)的手機(jī)三軸加速度數(shù)據(jù)A=[axayaz]和繞三軸角速度數(shù)據(jù)G=[gxgygz]作分析。
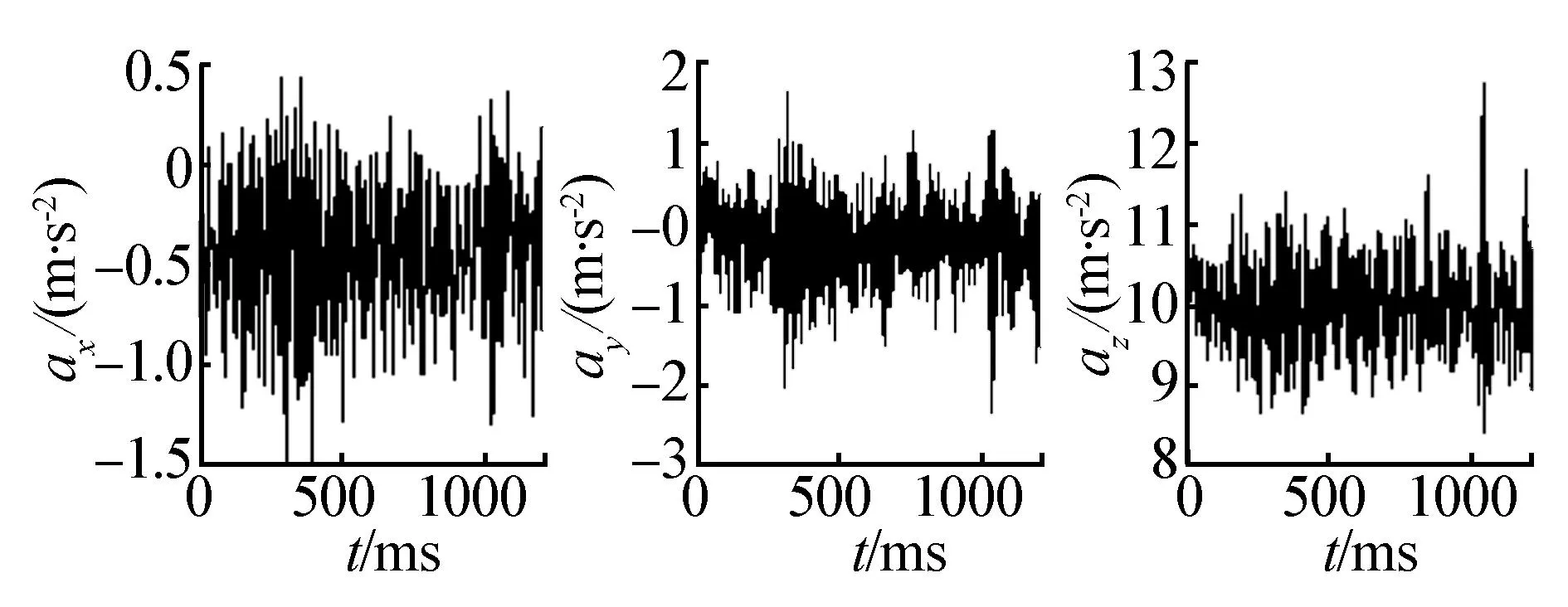
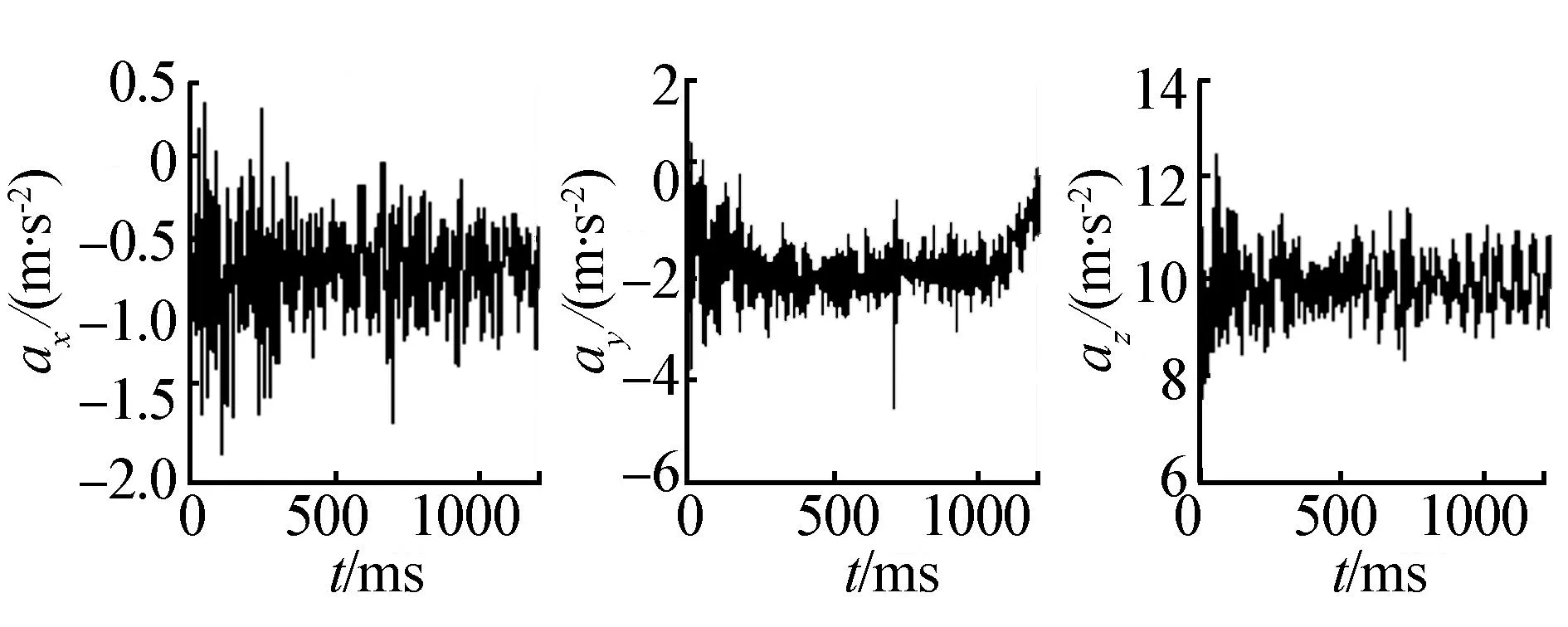
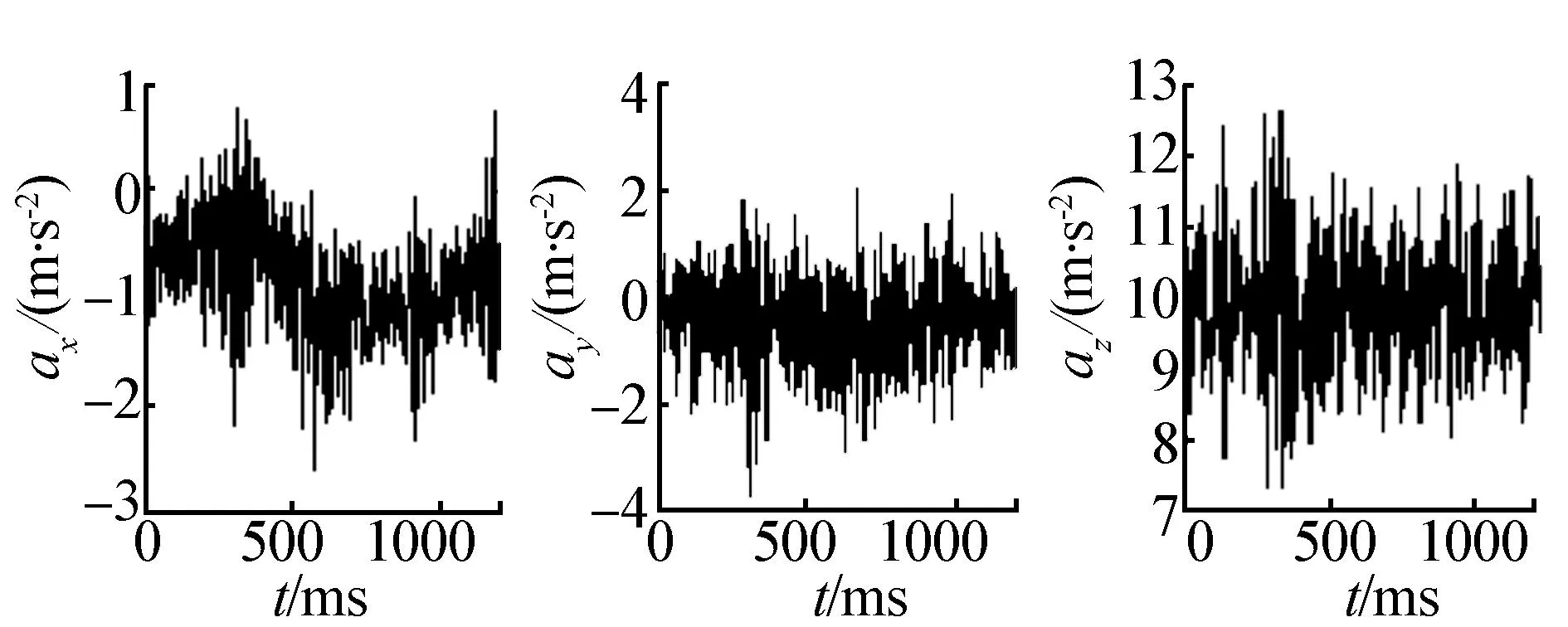
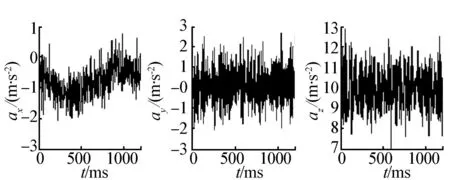
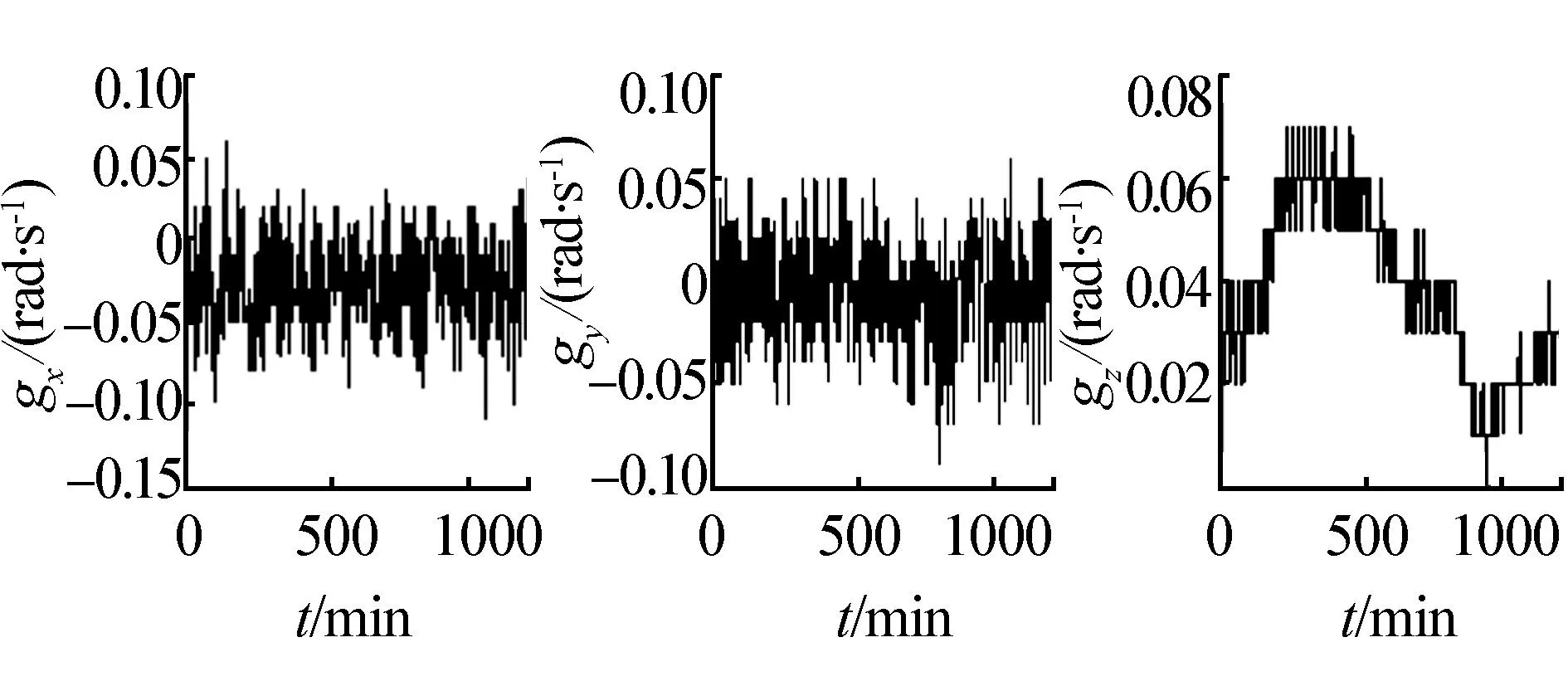
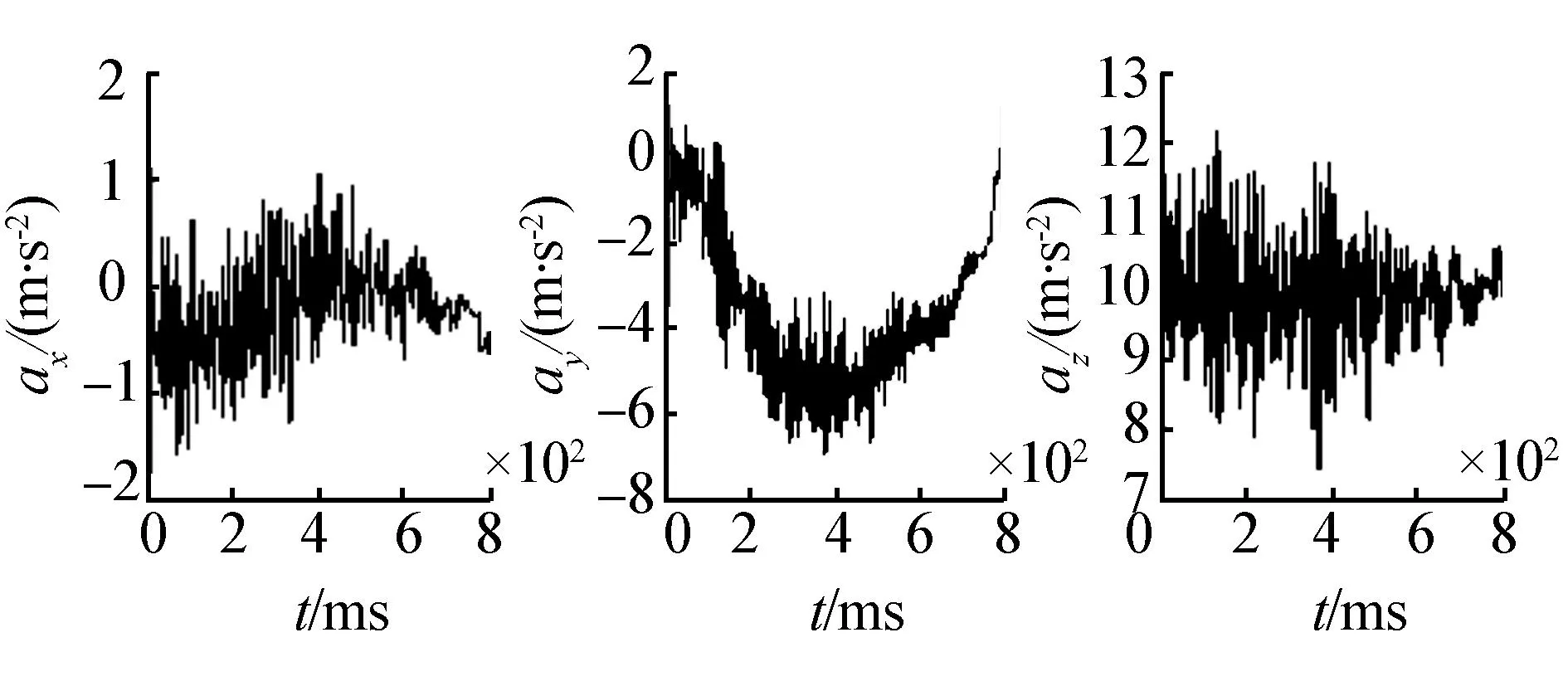
車載手機(jī)傳感器數(shù)據(jù)在幾種車輛駕駛行為狀況下的參數(shù)變化如圖3所示(每幅圖片的第1張表示X軸參數(shù)變化,第2張是Y軸參數(shù)變化,第3張是Z軸參數(shù)變化)。
(a)正常行駛加速度變化
(b)減速過程加速度變化

(c)加速過程加速度變化
(d)右變道過程加速度變化
(e)左變道過程加速度變化

(f)右變道過程角速度變化
(g)左變道過程角速度變化
(h)急剎車過程加速度變化圖3 不同駕駛行為參數(shù)變化圖Fig.3 Parameters curves corresponding to various driving behaviors
1)分析圖3(a),手機(jī)三軸加速度在車輛正常行駛過程中數(shù)據(jù)特征不明顯。
2)分析圖3(b),手機(jī)Y軸加速度在車輛減速行駛過程中逐步由0減小至負(fù)值,車輛完成減速趨于平穩(wěn)后又返回0值,Y軸加速度數(shù)據(jù)特征明顯。
3)分析圖3(c),手機(jī)Y軸加速度在車輛加速行駛過程中逐步由0增加至正值,車輛完成加速趨于平穩(wěn)后又返回0值,Y軸加速度數(shù)據(jù)特征明顯,但與減速過程恰好相反。
4)分析圖3(d)和圖3(f),手機(jī)X軸加速度和繞Z軸角速度在車輛右變道行駛過程中數(shù)據(jù)特征明顯。
5)分析圖3(e)和圖3(g),手機(jī)X軸加速度和繞Z軸角速度在車輛左變道行駛過程中數(shù)據(jù)特征明顯,但與右變道過程恰好相反。
6)分析圖3(h),手機(jī)Y軸加速度在急剎車過程中逐步由0減小至負(fù)值,車輛完成剎車趨于平穩(wěn)后又返回0值。Y軸加速度數(shù)據(jù)特征與減速過程類似,但變化幅度遠(yuǎn)大于正常減速過程。
綜合分析6種駕駛行為,車載手機(jī)的三軸加速度在車輛正常行駛過程中無(wú)明顯波動(dòng),但在其他幾種車輛駕駛行為情況下,手機(jī)三軸加速度數(shù)據(jù)均有明顯變化,而變道過程(包括左右變道)中繞Z軸角速度數(shù)據(jù)特征也很明顯。
3車輛異常駕駛行為檢測(cè)算法
基于對(duì)傳感器數(shù)據(jù)的深入分析,提出了一種車輛異常駕駛行為檢測(cè)算法,并開發(fā)了一款基于該算法的“車輛異常駕駛行為檢測(cè)系統(tǒng)”,系統(tǒng)檢測(cè)算法流程如圖4所示。
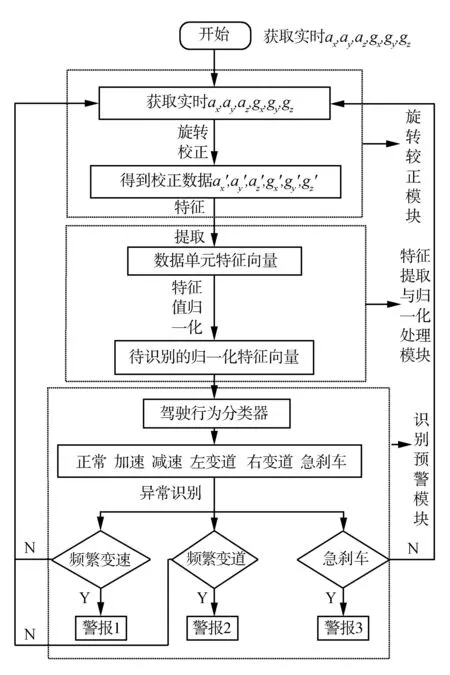
圖4 系統(tǒng)檢測(cè)算法Fig.4 Detection algorithm of system
3.1手機(jī)動(dòng)態(tài)參數(shù)旋轉(zhuǎn)校正
車輛異常駕駛行為檢測(cè)系統(tǒng)啟動(dòng)后,按照100 Hz的頻率讀取車載手機(jī)的三軸加速度數(shù)據(jù)和三軸角速度數(shù)據(jù)。
若手機(jī)在系統(tǒng)運(yùn)行過程中處于X軸與車體橫向水平參照線(如圖5所示)平行,而X-Y平面處于非水平的姿態(tài)時(shí),系統(tǒng)對(duì)數(shù)據(jù)進(jìn)行旋轉(zhuǎn)校正,將其旋轉(zhuǎn)為前述“標(biāo)準(zhǔn)姿態(tài)”下的數(shù)據(jù)。校正算法為:
1)獲取夾角:根據(jù)提取的手機(jī)三軸加速度數(shù)據(jù)A=[axayaz]和三軸環(huán)境磁場(chǎng)數(shù)據(jù)M=[mxmymz](mx表示手機(jī)X軸的磁場(chǎng)環(huán)境數(shù)據(jù),my表示Y軸磁場(chǎng)環(huán)境數(shù)據(jù),mz表示Z軸磁場(chǎng)環(huán)境數(shù)據(jù),均由手機(jī)磁場(chǎng)傳感器獲得),利用融合三軸加速度數(shù)據(jù)和三軸環(huán)境磁場(chǎng)數(shù)據(jù)的算法(具體算法專利歸傳感器公司所有),計(jì)算得到手機(jī)翻滾角α和俯仰角β,α和β分別表示手機(jī)沿X軸方向與水平面的夾角和沿Y軸方向與水平面的夾角。
2)數(shù)據(jù)旋轉(zhuǎn):基于空間三維坐標(biāo)旋轉(zhuǎn)方法,將三軸加速度數(shù)據(jù)A=[axayaz]和角速度數(shù)據(jù)G=[gxgygz]分別旋轉(zhuǎn)至“標(biāo)準(zhǔn)姿態(tài)”下的虛擬水平面為A′=[ax′ay′az′]和G′=[gx′gy′gz′]。旋轉(zhuǎn)后的手機(jī)虛擬姿態(tài)如圖5所示。

圖5 手機(jī)數(shù)據(jù)旋轉(zhuǎn)校正Fig.5 Data correction of smart phone
數(shù)據(jù)旋轉(zhuǎn)形式如式(1)和式(2):
(1)
(2)
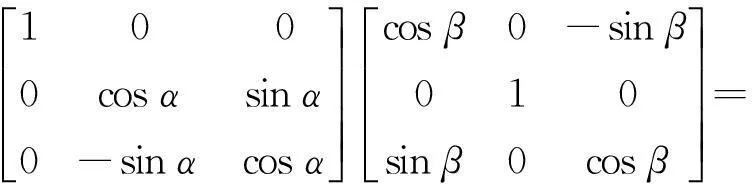

(3)
(4)
旋轉(zhuǎn)順序?yàn)椋?/p>
第1次旋轉(zhuǎn):先繞X軸將Y軸旋轉(zhuǎn)至與水平面平行,手機(jī)體相對(duì)坐標(biāo)系由X-Y-Z旋轉(zhuǎn)至X′-Y′-Z′,如圖6(a)所示;
第2次旋轉(zhuǎn):再繞Y′軸將X′軸旋轉(zhuǎn)至與水平面平行,手機(jī)體相對(duì)坐標(biāo)系由X′-Y′-Z'旋轉(zhuǎn)至X″-Y″-Z″,如圖6(b)所示。
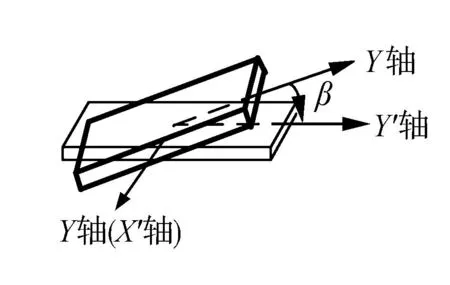
(a)第1次
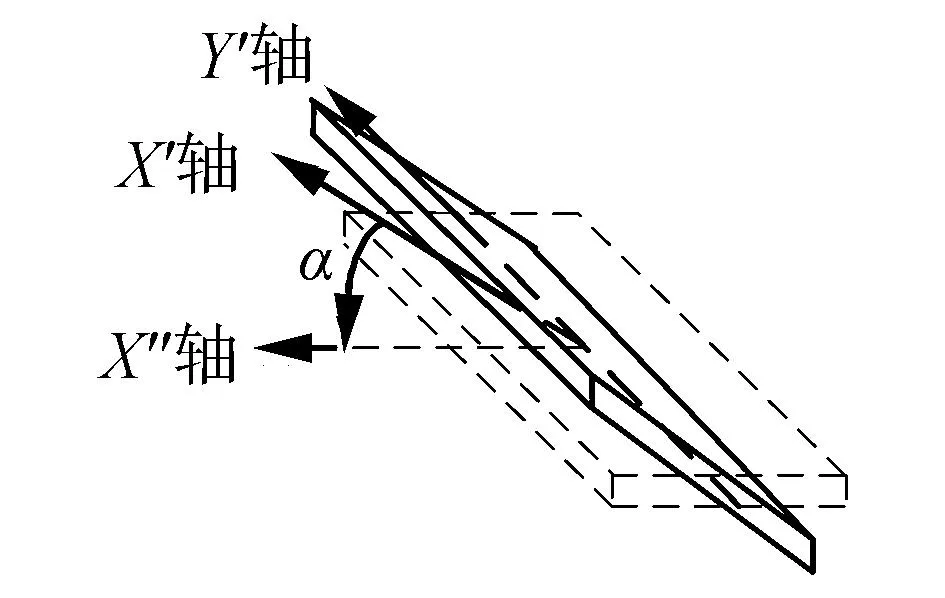
(b)第2次
3.2數(shù)據(jù)單元特征提取
為保證系統(tǒng)的實(shí)時(shí)性,把系統(tǒng)識(shí)別窗口設(shè)置成2 s時(shí)長(zhǎng),將窗口內(nèi)經(jīng)過旋轉(zhuǎn)處理的加速度和角速度數(shù)據(jù)作為一個(gè)數(shù)據(jù)單元來(lái)進(jìn)行識(shí)別。
由于手機(jī)傳感器數(shù)據(jù)獲取接口的原因,導(dǎo)致在100 Hz的數(shù)據(jù)更新頻率下,400次數(shù)據(jù)才是一個(gè)數(shù)據(jù)單元,故每個(gè)數(shù)據(jù)單元是400×6的矩陣,矩陣的6列數(shù)據(jù)為axi′,ayi′,azi′,gxi′,gyi′,gzi′(i=1,2,…,400)。
考慮到智能手機(jī)的計(jì)算能力,故設(shè)定的相鄰窗口不重疊。圖7顯示了系統(tǒng)讀取單元數(shù)據(jù)使用的連續(xù)窗口,其中橫坐標(biāo)為時(shí)間。
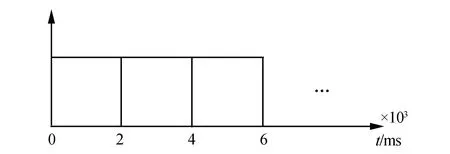
圖7 取值窗口Fig.7 Data capturing windows
系統(tǒng)實(shí)時(shí)提取數(shù)據(jù)單元的特征值,一個(gè)數(shù)據(jù)單元的特征值組成一個(gè)特征向量。提取的特征值如表1所示。
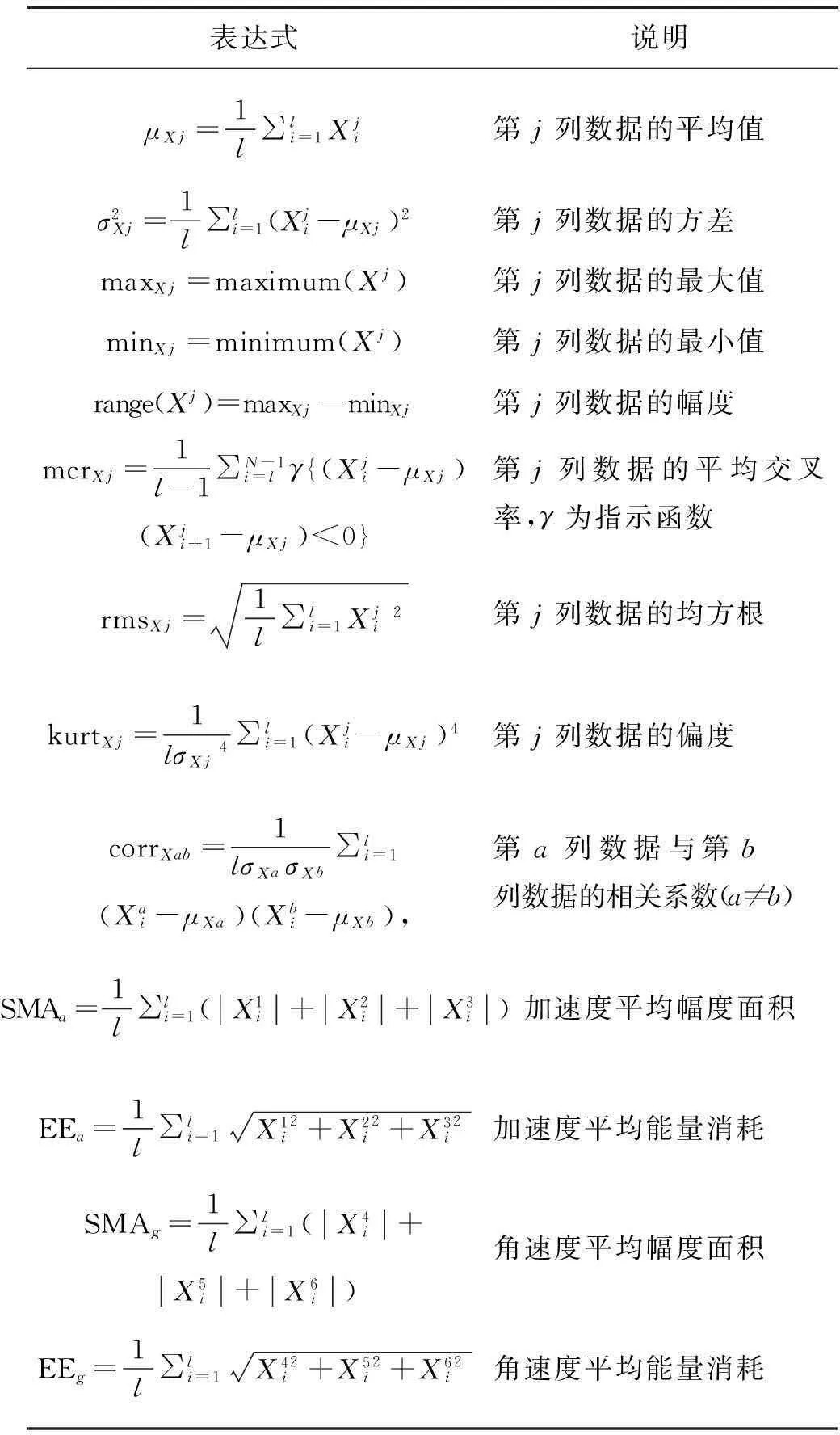
表1 提取的特征值

3.3特征值歸一化處理
為消除量綱的影響,同時(shí)把各個(gè)特征值的尺度控制在相同的范圍內(nèi),在系統(tǒng)中設(shè)置特征向量歸一化處理模塊,采用的數(shù)據(jù)歸一化映射關(guān)系為
(5)
式(5)中,ymax和ymin是目標(biāo)映射區(qū)間的上下限,根據(jù)需要設(shè)定;xmax是所有特征值分量的最大值,xmin是所有特征值分量的最小值,xi是待處理的特征值,xi′是歸一化處理后的特征值。這里選擇ymin=-1和ymax=1來(lái)歸一化特征向量。
3.4駕駛行為識(shí)別
提取車載手機(jī)傳感器信號(hào)特征后,設(shè)計(jì)基于核ELM算法的分類器來(lái)識(shí)別各種駕駛行為。
極限學(xué)習(xí)機(jī)(ELM ,extreme learning machine)是一種快速的單隱層神經(jīng)網(wǎng)絡(luò)(SLFN)訓(xùn)練算法,最早由南洋理工大學(xué)黃廣斌教授等[14]于2004年提出;結(jié)合支持向量機(jī)(SVM,support vector machine)、LS-SVM(least square support vector machine)及P-SVM(Proximal Support vector machine)等方法的學(xué)習(xí)原理[15-16],黃廣斌等又在2012年提出了核ELM算法[17]。與SVM、LS-SVM、P-SVM及原始的ELM算法相比,核ELM算法的參數(shù)敏感性更低(特別是對(duì)隱層節(jié)點(diǎn)數(shù)),且在隱層節(jié)點(diǎn)數(shù)足夠大的情況下,算法便能獲得較高的準(zhǔn)確率,從而縮減了參數(shù)調(diào)優(yōu)時(shí)間。此外,核ELM算法不用計(jì)算隱層輸出矩陣,只須通過計(jì)算核函數(shù)k(x,xi)來(lái)確定最終的輸出。
基于核ELM算法的駕駛行為學(xué)習(xí)過程為:
1)由輸入的駕駛行為特征向量訓(xùn)練集確定最優(yōu)輸出權(quán)重:β=HT(I/C+HHT)-1T。
2)由輸入的駕駛行為特征向量測(cè)試集得到駕駛行為分類器的輸出函數(shù):
(ΩELM)ij=h(xi)·h(xj)=k(xi,xj)。則駕駛行為的核ELM分類器的輸出為
(6)
式中:I為常向量,T為只與訓(xùn)練集標(biāo)簽相關(guān)的向量,而核矩陣ΩELM只和訓(xùn)練階段輸入的駕駛行為特征向量數(shù)據(jù)xi及樣本的個(gè)數(shù)N有關(guān),需要人為指定的參數(shù)只有正則項(xiàng)系數(shù)C和核函數(shù)k(x,xi)(核中包含核參數(shù)γ)。
3.5異常駕駛行為識(shí)別
實(shí)現(xiàn)駕駛行為識(shí)別后,需在此基礎(chǔ)上進(jìn)一步判斷車輛是否出現(xiàn)異常駕駛行為。對(duì)此,在系統(tǒng)識(shí)別模塊設(shè)定一個(gè)識(shí)別時(shí)間窗口[ti,tj]和該窗口內(nèi)的變道次數(shù)閾值ns、變速次數(shù)閾值ss。
1)若系統(tǒng)在窗口[ti,tj]內(nèi)識(shí)別出的變道(包括左右兩種變道)次數(shù)為n,且n>ns,則判定車輛出現(xiàn)頻繁變道的危險(xiǎn)行為,并立即觸發(fā)“頻繁變道”報(bào)警語(yǔ)音,以提醒駕駛員進(jìn)行安全駕駛。
2)若系統(tǒng)在窗口[ti,tj]內(nèi)識(shí)別出的變速(包括加速和減速)次數(shù)為s,且s>ss,則判定車輛出現(xiàn)頻繁加減速的危險(xiǎn)行為,并立即觸發(fā) “頻繁加減速”報(bào)警語(yǔ)音,以提醒駕駛員進(jìn)行安全駕駛。
3)若系統(tǒng)在窗口[ti,tj]內(nèi)識(shí)別出急剎車行為,則判定車輛出現(xiàn)急剎車的危險(xiǎn)行為,并立即觸發(fā) “急剎車”報(bào)警語(yǔ)音,以提醒駕駛員進(jìn)行安全駕駛。
4實(shí)驗(yàn)驗(yàn)證
4.1駕駛行為分類器測(cè)試
將采集的6種駕駛行為數(shù)據(jù)集中630個(gè)樣本作為訓(xùn)練集,剩下的629個(gè)樣本作為測(cè)試集,并分別測(cè)試核ELM算法和SVM算法設(shè)計(jì)的駕駛行為分類器的性能。
采用核ELM算法來(lái)設(shè)計(jì)駕駛行為分類時(shí),核函數(shù)選用高斯核(RBF),正則項(xiàng)系數(shù)C和核參數(shù)γ在范圍log2C=[-20,20],log2γ=[-20,20]內(nèi)均按照步長(zhǎng)1等間距取值。測(cè)試結(jié)果如圖8所示。
采用SVM算法來(lái)設(shè)計(jì)駕駛行為分類時(shí),核函數(shù)選用高斯核(RBF),懲罰系數(shù)C和核參數(shù)γ取值范圍同上。測(cè)試結(jié)果如圖9所示。
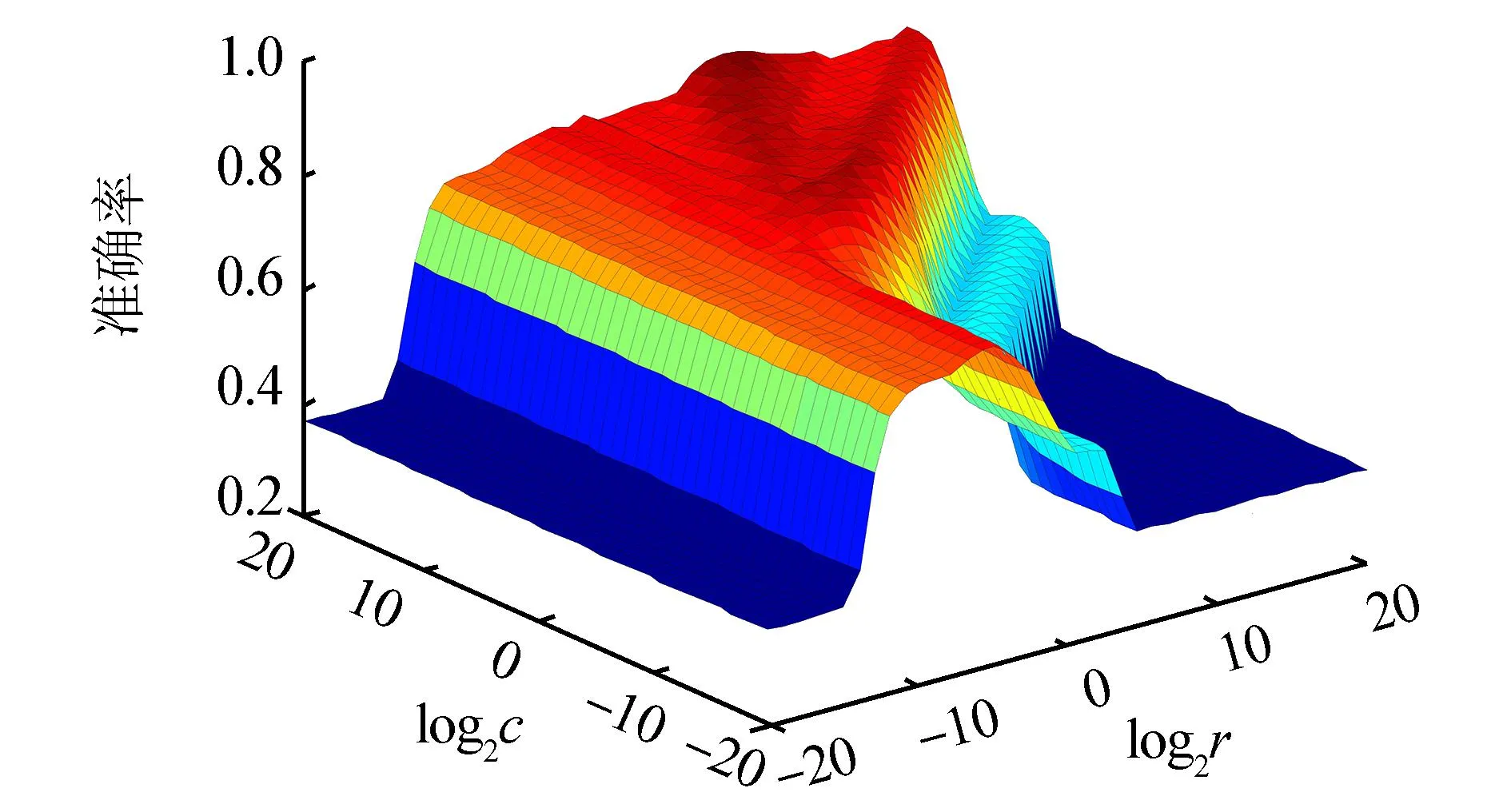
圖8 核ELM測(cè)試結(jié)果Fig.8 Kernel ELM test results
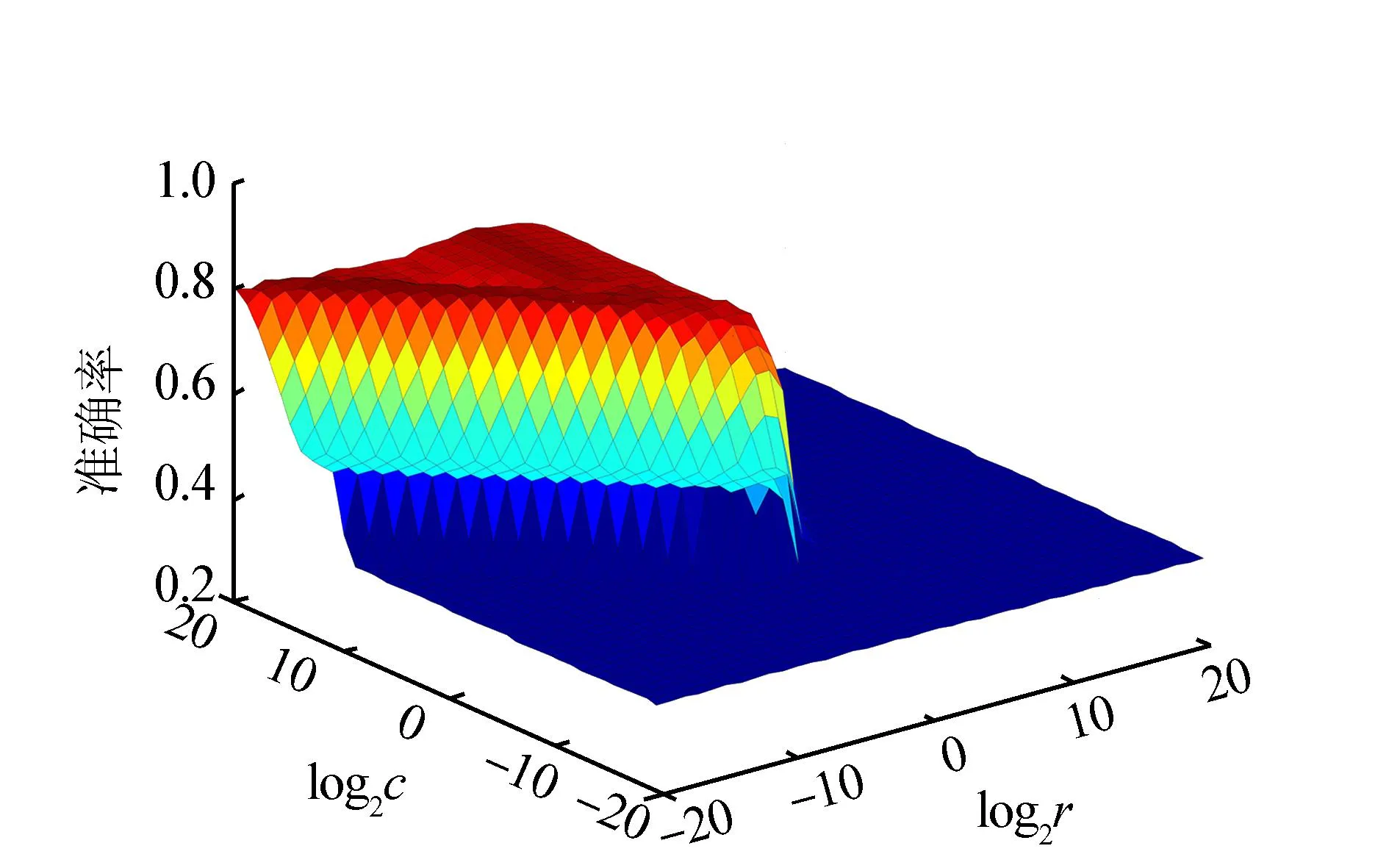
圖9 SVM測(cè)試結(jié)果Fig.9 SVM test results
分析圖8,采用核ELM算法設(shè)計(jì)的駕駛行為分類器在A={(log2C,log2γ)|log2C∈[-10,20],log2γ∈[-10,20]}及B={(log2C,log2γ)|log2C∈[-20,20],log2γ∈[-10,0]}兩個(gè)區(qū)域內(nèi)的正確識(shí)別率達(dá)到81%左右,且當(dāng)C=104 857 6,γ=206.830 9時(shí)正確識(shí)別率最高,達(dá)到81.88%,此時(shí)的測(cè)試運(yùn)行時(shí)間為0.020 3 s。
分析圖9,采用SVM算法設(shè)計(jì)的駕駛行為分類器僅在D={(log2C,log2γ)|log2C∈[10,20],log2γ∈[-10,5]}區(qū)域內(nèi)的正確識(shí)別率較高,達(dá)到80%左右,且當(dāng)C=101.5937,γ=0.040 8時(shí)正確識(shí)別率最高,為80.76%,而此時(shí)的測(cè)試運(yùn)行時(shí)間為0.817 2s。
可見,基于核ELM算法的駕駛行為分類器相比基于SVM的駕駛行為分類器有如下優(yōu)點(diǎn):
1)對(duì)參數(shù)C和γ的敏感性更低;
2)整體正確識(shí)別率更高;
3)時(shí)間復(fù)雜度更低,實(shí)時(shí)性更強(qiáng)。
故本文采用核ELM算法設(shè)計(jì)駕駛行為分類器。
4.2系統(tǒng)測(cè)試
為了測(cè)試系統(tǒng)性能,本文開展了系統(tǒng)測(cè)試試驗(yàn)。試驗(yàn)路段為北京市房山區(qū)長(zhǎng)陽(yáng)鎮(zhèn)長(zhǎng)陽(yáng)路一段路面平坦且車輛較少的路段,如圖10所示。

圖10 試驗(yàn)路段Fig.10 Experiment road
系統(tǒng)測(cè)試試驗(yàn)采用的駕駛行為分類器的主要參數(shù)為:核函數(shù)為高斯核(RBF),C=104 857 6,γ=206.830 9;而最優(yōu)輸出權(quán)重β是一個(gè)630×4的矩陣,限于篇幅,在此不列出。
本次試驗(yàn)中,4位志愿者共做了150次變速實(shí)驗(yàn),140次變道實(shí)驗(yàn),115次急剎車實(shí)驗(yàn),約142次正常行駛實(shí)驗(yàn)。系統(tǒng)運(yùn)行界面如圖11所示,系統(tǒng)識(shí)別結(jié)果如表2所示。由表2可知,系統(tǒng)對(duì)變速、急剎車、正常行駛等行為識(shí)別效果較好,但對(duì)變道行為識(shí)別效果較差。變道實(shí)例有140個(gè),其中57個(gè)被正確分類,67個(gè)被誤判為變速,7個(gè)被誤判為正常行駛,9個(gè)被誤判為急剎車,但這合乎常理,因?yàn)樽兊肋^程中經(jīng)常伴隨減速行為,只是有時(shí)候減速行為特征比變道行為特征更明顯。

圖11 系統(tǒng)運(yùn)行界面Fig.11 System operation interface
Table 2Four kinds of vehicle driving behavior recognition results
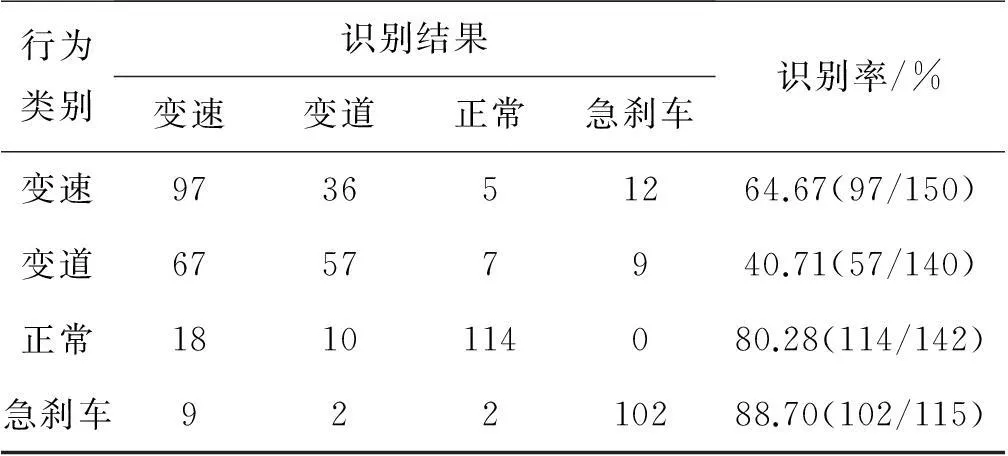
行為類別識(shí)別結(jié)果變速變道正常急剎車識(shí)別率/%變速973651264.67(97/150)變道67577940.71(57/140)正常1810114080.28(114/142)急剎車92210288.70(102/115)
5結(jié)束語(yǔ)
文章通過車載手機(jī)獲取車輛運(yùn)行動(dòng)態(tài)參數(shù),并采用核ELM算法訓(xùn)練出了魯棒性較強(qiáng)的車輛駕駛行為分類器,與基于SVM算法的分類器相比,前者對(duì)車輛駕駛行為的識(shí)別效果優(yōu)于后者。提出的“車輛異常駕駛行為檢測(cè)系統(tǒng)”對(duì)變速、急剎車、正常行駛等行為的識(shí)別效果令人滿意。在后續(xù)研究中,我們將改進(jìn)車輛變道行為識(shí)別方法,并研究手機(jī)傳感器數(shù)據(jù)實(shí)時(shí)濾波技術(shù),以剔除噪聲干擾,提高識(shí)別精度。此外,在檢測(cè)到車輛異常駕駛行為信息后,如何將信息上傳至監(jiān)控端,而監(jiān)控端在接收信息后如何將信息反饋至監(jiān)測(cè)路網(wǎng)內(nèi)的車輛也是今后努力的方向[18]。
參考文獻(xiàn):
[1]KWAPISZ J R, WEISS G M, MOORE S A. Activity recognition using cell phone accelerometers[C]//Proceedings of the Fourth International Workshop on Knowledge Discovery from Sensor Data. Washington, DC, USA, 2010, 12(2): 74-82.
[2]FANG S H, LIANG Y C, CHIU K M. Developing a mobile phone-based fall detection system on android platform[C]//Proceedings of Computing, Communications and Applications Conference. Hong Kong, China, 2012: 143-146.
[3]VIET V Q, LEE G, CHOI D. Fall detection based on movement and smart phone technology[C]//Proceedings of IEEE RIVF International Conference on Computing and Communication Technologies, Research, Innovation, And Vision For The Future. Ho Chi Minh City, Vietnam, 2012: 1-4.
[4]ZHANG Shumei, MCCULLAGH P, NUGENT C, et al. Activity monitoring using a smart phone’s accelerometer with hierarchical classification[C]//Proceedings of the 6thInternational Conference on Intelligent Environments. Kuala Lumpur, Malaysia, 2010: 158-163.
[5]ZHAO Zhongtang, CHEN Yiqiang, LIU Junfa, et al. Fall detecting and alarming based on mobile phone[C]//Proceedings of Ubiquitous Intelligence & Computing and the 7thInternational Conference on Autonomic & Trusted Computing. Xi’an, China, 2010: 494-497.
[6]BAI Yingwen, WU S C, TSAI C L. Design and implementation of a fall monitor system by using a 3-axis accelerometer in a smart phone[C]//Proceedings of the 16thInternational Symposium on Consumer Electronics. Harrisburg, PA, USA, 2012: 1-6.
[7]DAI Jiangpeng, TENG Jin, BAI Xiaole, et al. Mobile phone based drunk driving detection[C]//Proceedings of the 4thInternational Conference on-NO Permissions, Pervasive Computing Technologies for Healthcare. Munich, Germany, 2010: 1-8.
[8]PAEFGEN J, KEHR F, ZHAI Yudan, et al. Driving behavior analysis with smartphones: insights from a controlled field study[C]//Proceedings of the 11thConference on Mobile and Ubiquitous Multimedia. New York, NY, USA, 2012: 408-414.
[9]XU Lunbo, LI Shunyang, BIAN Kaigui, et al. Sober-Drive: A smartphone-assisted drowsy driving detection system[C]//Proceedings of International Conference on Computing, Networking and Communications. Honolulu, HI, USA, 2014: 398-402.
[10]EREN H, MAKINIST S, AKIN E, et al. Estimating driving behavior by a smartphone[C]//Proceedings of IEEE Intelligent Vehicles Symposium. Alcalá de Henares, Spain, 2012: 234-239.
[11]FAZEEN M, GOZICK B, DANTU R, et al. Safe driving usin g mobile phones[J]. IEEE transactions on intelligent transportation systems, 2012, 13(3): 1462-1468.
[12]李偉健, 林亞平, 葉松濤. 智能手機(jī)碰撞檢測(cè)及在汽車事故自救中的應(yīng)用[J]. 計(jì)算機(jī)工程, 2011, 37(9):
245-247.
LI Weijian, LIN Yaping, YE Songtao. Shock detection with smart mobile phone and its application in car accident self-rescue[J]. Computer engineering, 2011, 37(9): 245-247.
[13]趙龍, 閔昆龍, 韓玉杰. 基于智能手機(jī)群的車輛事故自救系統(tǒng)[J]. 計(jì)算機(jī)系統(tǒng)應(yīng)用, 2013, 22(2): 34-37.
ZHAO Long, MIN Kunlong, HAN Yujie. Vehicle accident self-rescue system based on smart mobile phone groups[J]. Computer systems & applications, 2013, 22(2): 34-37.
[14]HUANG Guangbin, ZHU Qinyu, SIEW C K. Extreme learning machine: a new learning scheme of feedforward neural networks[C]//Proceedings of IEEE International Joint Conference on Neural Networks. Budapest, Hungary, 2004, 2: 985-990.
[15]CORTES C, VAPNIK V. Support-vector networks[J]. Machine learning, 1995, 20(3): 273-297.
[16]FUNG G, MANGASARIAN O L. Proximal support vector machine classifier[C]//Proceedings of the 7thACM SIGKDD International Conference on Knowledge Discovery and Data Mining. New York, NY, USA, 2001: 77-86.
[17]HUANG Guangbin, DING Xiaojian, ZHOU Hongming. Optimization method based extreme learning machine for classification[J]. Neurocomputing, 2010, 74(1/2/3): 155-163.
[18]肖艷麗, 張振宇, 楊文忠. 移動(dòng)數(shù)據(jù)的交通出行方式識(shí)別方法[J]. 智能系統(tǒng)學(xué)報(bào), 2014, 9(5): 536-543.
XIAO Yanli, ZHANG Zhenyu, YANG Wenzhong. Research of the identification methods for transportation modes based on mobile data[J]. CAAI transactions on intelligent systems, 2014, 9(5): 536-543.
周后飛,男,1990年生,碩士研究生,主要研究方向?yàn)橹悄芙煌ㄅc設(shè)備。

劉華平,男,1976年生,副教授,主要研究方向?yàn)橹悄軝C(jī)器人。

石紅星,男,1974年生,高級(jí)工程師,主要研究方向?yàn)槁访娌牧稀⒔煌ò踩⒅悄芙煌ǎ群笾鞒趾蛥⒓佣囗?xiàng)省部級(jí)課題,獲省級(jí)科技進(jìn)步一等獎(jiǎng)1項(xiàng)、三等獎(jiǎng)2項(xiàng),發(fā)表學(xué)術(shù)論文20余篇。
中文引用格式:周后飛,劉華平,石紅星,等.智能手機(jī)車輛異常駕駛行為檢測(cè)方法[J]. 智能系統(tǒng)學(xué)報(bào), 2016, 02(1): 410-417.
英文引用格式:ZHOU Houfei, LIU Huaping, SHI Hongxing,et al. Abnormal driving behavior detection based on the smart phone[J]. CAAI Transactions on Intelligent Systems, 2016, 02(1): 410-417.
Abnormal driving behavior detection based on the smart phone
ZHOU Houfei1,2,3, LIU Huaping2,3, SHI Hongxing4
(1.School of Civil & Architecture Engineering, Chongqing Jiaotong University, Chongqing 400074, China; 2. Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China; 3. State Key Laboratory of Intelligent Technology and Systems, Tsinghua University, Beijing 100084, China; 4. Road and Bridge Construction Group Co., Ltd. of Beijing, Beijing 100080, China)
Abstract:Using the smart phone as a tool for detecting abnormal driving behavior, this paper designs an abnormal driving behavior detection method and a practical system. First, the system obtains data from the acceleration, magnetic, and gyroscope sensors of an on-board smart phone. Then, through coordinate rotation, feature extraction, and an online driving behavior analysis algorithm, which is based on the kernel extreme learning machine (ELM) algorithm, the system identifies real-time abnormal driving behavior, including frequent lane-changing, frequent speed-changing, and emergency braking. It then sets off an alarm when abnormal driving behavior has been identified. Test results indicate that the driving behavior classifier, which is based on the kernel ELM algorithm, performs better than the support vector machine algorithm. In addition, the proposed abnormal driving behavior detection system can effectively identify various driving behaviors.
Keywords:smart phone; abnormal driving behavior detection; sensor; kernel method; extreme learning machine (ELM); support vector machine
作者簡(jiǎn)介:
中圖分類號(hào):TP29;U49
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1673-4785(2016)01-0410-08
通信作者:劉華平.hpliu@tsinghua.edu.cn.
基金項(xiàng)目:國(guó)家重點(diǎn)基礎(chǔ)研究與發(fā)展計(jì)劃項(xiàng)目(2013CB329403).
收稿日期:2015-04-09. 網(wǎng)絡(luò)出版日期:2015-09-30.
DOI:10.11992/tis.201504022
網(wǎng)絡(luò)出版地址:http://www.cnki.net/kcms/detail/23.1538.tp.201509030.1456.002.html
猜你喜歡
紅領(lǐng)巾·萌芽(2022年9期)2022-11-24 05:55:58
英語(yǔ)文摘(2020年5期)2020-09-21 09:26:30
湖北農(nóng)機(jī)化(2020年4期)2020-07-24 09:07:46
瘋狂英語(yǔ)·新悅讀(2019年10期)2019-12-13 09:02:30
軍事文摘(2019年18期)2019-09-25 08:09:08
趣味(語(yǔ)文)(2018年8期)2018-11-15 08:53:00
信息安全研究(2016年4期)2016-12-01 06:06:47
海外星云(2016年7期)2016-12-01 04:18:00
新聞傳播(2016年11期)2016-07-10 12:04:01
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年4期)2016-05-17 05:35:45