如何讓焊接機器人自己干活
2016-06-12 02:08:06
中國機械 2016年2期
?
如何讓焊接機器人自己干活
隨著以計算機技術為支撐的集成與柔性制造系統在近些年的不斷發展,促進機器人系統同現代工業產業中其他自動化系統一體化發展已經成為了一種必然的發展趨勢。由于現代社會機器人生產技術更新速度的提升,以及社會發展的要求,對機器人內部的控制系統進行研究,提升該系統中硬件與軟件結構的開放性則成為了當前相關研究者重點的工作內容。
焊接機器人其內部系統的控制器主要是由計算機、PLC以及機器人的控制器這三大主要部分組成。在機器人的日常工作過程中這三部分除了要對機器人的動作進行有效的控制之外,還需要完成對相關信息數據的輸入與輸出的控制。其中,主控制部分主要是按照示教盒發出的信息數據生成自身工作流程,通過對流程進行詳細的運算來計算出各個軸需要完成的運動指令,計算完成后,將結果發送給伺服驅動;而后,伺服驅動便開始處理來自于主控部分的指令,從而產生馭動電流。在驅動伺服電機時,依靠的是PLC控制系統,其主要是通過對輸出和輸入信號數據的控制,在機器人進行作業的過程中,通過連接輸出和輸入接口的方式向焊機發出相應的焊接工作指令,并實時監控焊機實際工作情況,控制周邊的系統裝置,保證焊機的正常運行。
此外,因PLC是被放置在機器人的控制系統中的控制器內的,所以,機器人也可以獨立的完成一些對小系統進行全部控制的工作任務。系統可以通過對機器人與其周邊配套裝置進行統一控制、管理以及采集相應傳感器信號的方式,來監視整個傳感器系統。當機器人系統在工作過程中出現故障時,控制系統將報警并同時停止所有控制作業系統。并且,為了保證機器人系統正常的工作情況不會受到內部與運行設備的較大影響,機器人系統中輔助設備的功能性也需要滿足焊接機器人的相關要求。
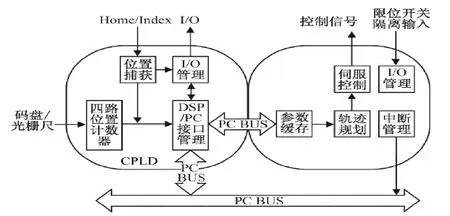
控制器內部流程示意圖
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電信科學(2016年10期)2016-11-23 05:11:56
