丘陵山地小型田間搬運機遙控系統設計
2016-06-14 17:32:11許洪斌王智強楊長輝
江蘇農業科學 2016年4期
關鍵詞:單片機
許洪斌+王智強+楊長輝
摘要:針對某款使用拉線方式控制的田間搬運機,設計了1種手動與遙控一體化的控制系統。該系統主要由發射控制模塊、接收控制模塊和電機執行裝置3大部分組成,以STC15W4K32S4中控單元為核心的接收控制模塊,配合無線通信協議,完成了對發射控制模塊無線信號的分析處理和電機執行裝置動作的實時控制,實現了搬運機的啟停、轉向、油門調節等遙控功能。結果表明,該系統遙控動作準確,遙控距離大于50 m,適合搬運機進行田間搬運工作。
關鍵詞:單片機;步進電機;搬運機;遙控
中圖分類號: TP271+.4;S229+.1
文獻標志碼: A
文章編號:1002-1302(2016)04-0398-03
重慶威馬公司生產的某田間搬運機主要用于山地農田中農作物、農藥和肥料等的搬運。該搬運機采用履帶式底盤,最大載質量320 kg,發動機功率3.6 kW,行走速度小于 1.4 m/s,最小回轉半徑1.15 m,爬坡能力15°。
該搬運機工作環境較差,導致農民在手扶駕駛過程中存在操作難度高、工作強度大和安全隱患等問題。因此,開發1款遙控系統,大量地減少農民手扶操作搬運機時間,不僅能降低農民的勞動強度,而且能提高駕駛的安全性[1-3]。本研究基于該搬運機的操控特性,開發了1套手動控制和遙控功能一體化的控制系統,不僅實現了搬運機無人駕駛的目的,而且在遙控裝置失控的情況下能實現手動控制,進一步提高搬運機駕駛安全性。
1 系統總方案
在不改變該搬運機原有機械傳動結構的基礎上,對其遙控系統進行開發,通過加裝由STC15W4K32S4控制的步進電機遙控系統,實現搬運機啟停、轉向和油門調節的遙控功能[4-9]。
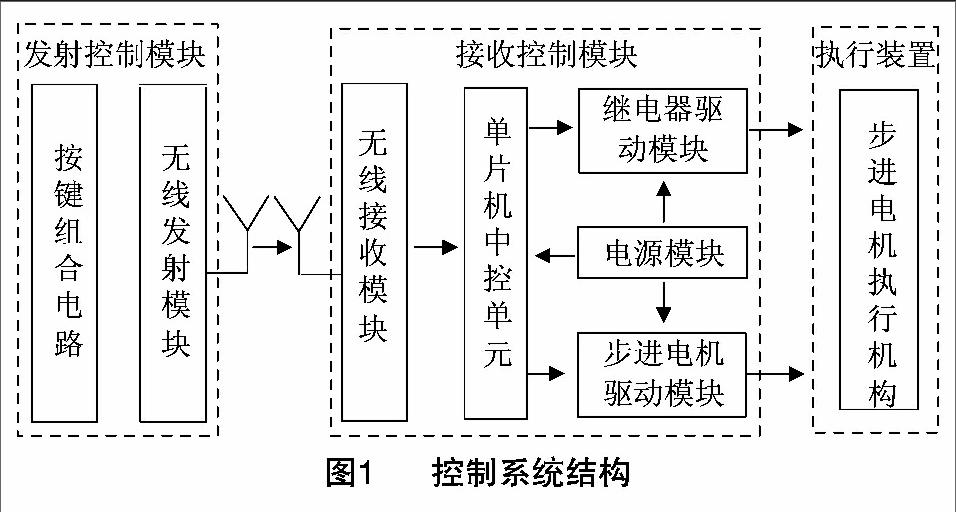
控制系統結構如圖1所示,控制系統結構由發射控制模塊、接收控制模塊和執行裝置3個部分組成。工作過程:單片機中控單元接收到遙控信號,發送相應的遙控指令作用于步進電機驅動模塊和繼電器驅動模塊;步進電機驅動模塊根據相應的遙控信號控制步進電機正反轉,最后由拉線伸縮來完成離合與制動、轉向、油門的規定動作;繼電器模塊作用于步進電機制動器,在步進電機脫離工作狀態時斷電,控制制動器抱閘制動,保證執行機構動作的穩定性,反之繼電器通電,制動器閘瓦分離,步進電機進入工作狀態。
2 系統硬件設計
2.1 發射控制模塊
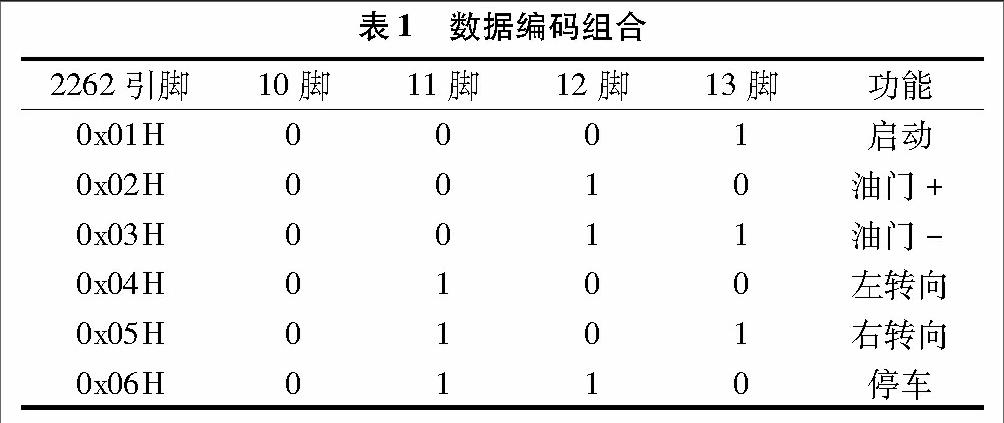
發射控制模塊為編碼芯片PT2262、工作頻率為 315 MHz 的6鍵遙控器。該模塊采用的PT2262是1款成本低廉且具有CMOS工藝、外圍電氣元件少以及耗能極低等特點的編碼芯片[10]。但該編碼芯片只有4個獨立的數據編碼通道(D0-D3),不能滿足6通道遙控器獨立按鍵操作的要求。為此采用組合電路的方式將PT2262編碼芯片的數據編碼通道擴展至6個,具體編碼組合見表1。根據我國無線電頻率劃分規定,315MHz載波頻率屬于開放頻段,在這一頻段內,用戶在發射功率小于10 mW、覆蓋范圍小于100 m或不超過本單位范圍內可自由使用[11]。
2.2 接收控制模塊
接收控制模塊包括HS2272-M6無線接收模塊、TB6560AHQ步進電機驅動模塊、5V常開繼電器模塊、STC15W4K32S4單片機中控單元和電源模塊。
HS2272-M6無線接收模塊與PT2262配套使用。在使用過程中采用焊錫搭焊方式,將編碼/解碼芯片PT2272/PT2262的地址碼管腳A0、A5均焊接至高電平,其余管腳懸空。通過該方法的應用可提高無線遙控模塊在數據傳輸過程中的抗干擾能力。
TB6560AHQ步進電機驅動器作為步進電機驅動模塊,采用6N137高速光耦,額定最大輸出3A,最大細分數1/16,具有性能穩定、寬調速和低價位等特點。
繼電器模塊為光耦隔離繼電器模塊,主要由松樂5V繼電器、1N4732二極管、光電耦合器、晶體管和限流電阻組成。
控制模塊選用8位單片機STC15W4K32S4作為中控單元。P2.0-P2.5作為遙控信號輸入I/O口,與無線接收模塊的D0-D5引腳相連接。通過軟件查詢I/O狀態,單片機輸出相應的控制信號至步進電機驅動模塊控制接口和繼電器驅動模塊控制接口,進而控制驅動電路工作。
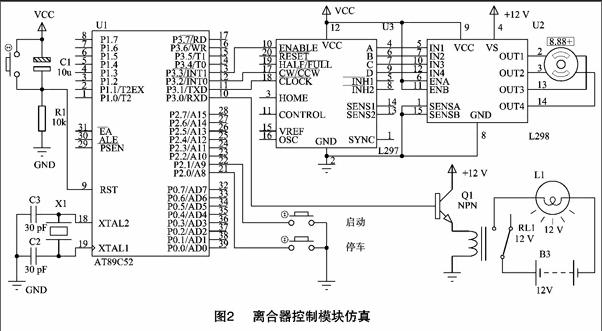
由于proteus中元器件較少,因此以AT89C52、L297與L298、lamp分別代替控制模塊中的STC15W4K32S4、TB6560AHQ、步進電機制動器進行仿真,離合器控制模塊仿真見圖2。
電源模塊包括24 V直流電源、LM2596電源降壓調整器。24 V直流電源與步進電機驅動器連接,作為步進電機的正常工作電源;直流電源通過LM2596降壓電路降壓至5 V,為單片機中控單元工作供電,降壓原理見圖3。
2.3 執行裝置
根據系統方案設計的執行裝置,通過拉線控制各個機構實現了以下功能:(1)離合與制動聯動機構的離合與制動;(2)轉向器的轉向操作(左轉向和右轉向);(3)油門大小的調節。
在保證搬運機整體結構完整性的基礎上,設計的步進電機執行裝置見圖4。轉向執行機構包括依次連接的步進電機制動器、轉向步進電機、聯軸器和輸出軸;步進電機制動器位于步進電機尾部,步進電機安裝在“U”形電機支架的一側板上,輸出軸通過另一側板上的通孔穿出電機支架與轉向桿連接以使轉向桿與輸出軸同步轉動;在轉向桿上設有2根相對轉動中心對稱的轉向拉線,2根轉向拉線穿過安裝板與農機的轉向機構相連;電機支架安裝在控制箱底板上并在二者之間設有彈性緩沖墊;通孔和輸出軸之間設有軸承及軸承座。
與轉向執行機構對比,油門、離合與制動聯動執行機構的差別在于輸出軸與繞線把手連接,分別通過拉線與農機上的油門機構、離合機構連接。
3 系統軟件開發
系統的軟件開發即是對中控單元STC15W4K32S4的程序開發。Keil C51作為程序開發軟件,對程序進行了模塊化設計,包括轉向子程序、油門調節子程序和啟停子程序等。遙控器6個按鍵對應功能為啟動、停車、加大油門、減小油門、左轉向、右轉向。以實現搬運機啟動為例,啟動子程序流程見圖5。
4 場地試驗
在室外進行測試試驗,試驗內容主要有接收控制模塊的接收信號距離測試和遙控執行裝置的穩定性測試。先后試驗共6次,每次試驗的時間單位為1 h,試驗流程:保持搬運機直線行駛10 m,按下轉向遙控按鍵轉彎90°后繼續沿直線行駛 5 m,如此反復操作按鍵保證搬運機沿10 m×5 m的矩形路線行走,直至每次試驗結束。在此過程中,當每次轉彎成功時控制搬運機的啟停和油門。性能測試結果見表2,試驗場地場景見圖6。
從表2可看出,在第1次試驗時離合器打滑,搬運機不能正常行駛,原因是離合執行機構轉動角度較小,導致汽油機與減速箱之間的皮帶輪出現打滑;增大轉角進行第2次試驗時發現,經過1 h反復操作,執行機構部分不能正常工作,原因為執行裝置中步進電機失步;改進步進電機算法后進行第3次試驗,在加大遙控操作距離時,偶爾出現控制失效情況,主要原因是發動機干擾無線模塊通信,導致通信距離短,后調整無線模塊的安裝位置,通信條件得到明顯改善,在50 m范圍內可靠遙控駕駛搬運機。
5 結論
經過試驗驗證,由發射控制模塊、接收控制模塊和執行裝置組成的手自一體化控制系統,實現了對該搬運機離合與制動、轉向和油門的準確控制。該系統具有以下特點:(1)遙控系統安全可靠,在一定程度上提高了工作效率、改善了操作環境;(2)盡可能保持了現有機構的可用性,且遙控系統具有良好的可移植性;(3)遙控系統的操作簡單易學,適合大部分農民的操作要求;(4)在遙控裝置失控的情況下可實現手動控制,進一步保障了農民的人身和財產安全。
參考文獻:
[1]胡 潔,張吉兵,趙占軍,等. 基于nRF905的遙控棚室作業機控制系統設計[J]. 中國農機化學報,2015,36(3):118-122.
[2]徐秀棟,楊福增,姚 垚,等. 微型果園機械遠程控制系統的研究與實現[J]. 農機化研究,2010,32(3):111-114.
[3]郭建昌,李 豐. 智能農田灌溉潛水泵無線控制器設計[J]. 中國農機化學報,2014,35(4):278-282.
[4]許洪斌,王智強,楊長輝,等. 一種拉線式農機遙控機構:中國,201520360296.8[P]. 2015-09-09.
[5]湯曉磊,張衍林,李學杰.7YGD-45型電動遙控式單軌果園運輸機[J]. 湖北農業科學,2013,52(2):443-447.
[6]蔣 蘋,胡文武,羅亞輝,等. 機滾船遙控駕駛系統設計[J]. 農業工程學報,2009,25(6):120-124.
[7]蔣 蘋,胡文武,孫松林,等. 水田作業機械無線遙控系統設計[J]. 農機化研究,2009,31(6):62-64,68.
[8]楊 鍇. 基于ARM9的林果運輸單軌車車況遠程監測系統設計[J]. 湖北農業科學,2012,51(10):2108-2110,2123.
[9]張俊峰,張衍林,張唐娟,等. 自走式山地單軌運輸機遙控系統的設計[J]. 華中農業大學學報,2012,31(6):792-796.
[10]林金陽,黃世震,林 偉,等. PT2262編碼芯片的內部電路分析及仿真[J]. 現代電子技術,2006,29(17):133-134,137.
[11]張俊峰. 山地果園單軌運輸機遙控關鍵技術與裝置的研究[D]. 武漢:華中農業大學,2012.萬 爽,何俊仕,付玉娟,等. 基于人工降水模擬的不同灌溉方式下土壤水分入滲[J]. 江蘇農業科學,2016,44(4):401-405.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36