集中式BLUE濾波器在組網雷達中的應用
2016-06-14 02:53:02王金根錢正祥
現代雷達 2016年5期
盛 琥,王金根,曹 燕,錢正祥
(陸軍軍官學院 6系 合肥 230037)
?
·數據處理·
集中式BLUE濾波器在組網雷達中的應用
盛琥,王金根,曹燕,錢正祥
(陸軍軍官學院 6系合肥 230037)
摘要:為解決組網雷達對目標跟蹤中的量測非線性問題,提出基于最佳線性無偏估計器(BLUE)準則的融合濾波方法。建立以融合中心為原點的組網雷達對目標定位的量測方程,推導出極坐標系與球坐標系下跟蹤目標的BLUE濾波模型。理論分析表明,集中式BLUE濾波架構在估計單個雷達量測轉換誤差統計特性的同時,還估計出雷達間量測轉換誤差的統計特性。因此,跟蹤精度和置信度較分布式BLUE濾波方法有顯著提高,計算量較其他算法也有明顯優勢。不同場景下的仿真分析證明:該方法在不同狀態噪聲水平下的表現優異,是一種很有競爭力的跟蹤算法。
關鍵詞:組網雷達;最佳線性無偏估計;非線性濾波;量測轉換
0引言
量測非線性[1]在雷達跟蹤系統中普遍存在,主要解決手段[2]有擴展卡爾曼濾波(EKF)、確定采樣濾波、隨機采樣濾波和量測轉換。EKF最早用于解決非線性估計問題,該方法簡單、直觀,但濾波精度一般。為改善非線性濾波效果,學者們提出確定性采樣濾波方法,包括:文獻[3]提出的基于無跡變換的無跡卡爾曼濾波器(UKF),文獻[4]提出的用球面徑向規則來逼近狀態后驗分布的容積卡爾曼濾波器(CKF),以及基于多項式插值擬合思想的中心差分濾波器(CDF)。該類濾波器的研究取得一些進展,但是在參數和采樣策略選取、穩定性分析方法研究上還存在一些瓶頸,計算量也比EKF要大得多,限制了它的應用推廣[5]。粒子濾波(PF)是另一種解決非線性問題的手段,它基于貝葉斯估計的序貫重要性采樣(SIS)濾波思想。算法早期受計算量和粒子匱乏等因素制約未能推廣[1],直到Gordon 等[6]提出基于SIS 的Bootstrap 非線性濾波方法,才奠定PF算法的基礎。其思想是尋找一組在狀態空間傳播的隨機樣本來逼近后驗概率密度,以樣本均值代替積分操作以獲得狀態的最小方差估計,該過程中的樣本稱為粒子。PF算法對非線性非高斯濾波問題有很強的解決能力,近年來在突變運動跟蹤[7]、機動目標跟蹤[8]、圖像處理[9]、濾波估計精度提高[10]等方面取得一些成果,但其計算量大(比UKF 高出百倍),且存在樣本衰竭問題[11],距離工程應用尚有差距。
量測轉換是解決非線性問題的另一種手段。其思想是將極坐標或球坐標系獲得的量測經坐標變換表達成直角坐標系的偽線性形式,估計出轉換誤差的一階矩和二階矩后,濾波跟蹤。該方法自提出以來,針對雷達中的目標跟蹤產生諸多成果。Lerro等[12]提出從極坐標系或球坐標系轉換到直角坐標系中有一個加性的量測轉換偏差,需做去偏處理,并估計出偏差大小和去偏誤差的協方差矩陣,稱為嵌套量測轉換。文獻[13]經過推導,得出量測轉換偏差的本質是乘性的且依賴于角度參數的誤差統計特性,并擴展到量測噪聲對稱非高斯分布的情況,使其具有更好的一致性和魯棒性。文獻[14]對文獻[13]的方法提出質疑,指出其存在轉換兼容性問題,并提出以雷達量測值為條件來計算轉換誤差均值與協方差矩陣,稱為無偏量測轉換,仿真證明該方法有更好的性能。文獻[15]概括前述方法,指出它們存在三個與卡爾曼濾波前提相沖突的缺陷,因此估計值絕非最優,并提出近似最佳線性無偏估計器(BLUE),在估計誤差和可靠性上都超過前者。文獻[16]對幾種典型的非線性濾波方法進行比較,得出基于BLUE 的量測轉換方法在計算量、置信度和跟蹤性能上都是最佳的結論。量測轉換[17-23]還被用于測角定位、多普勒定位、組網雷達、塔康系統和機動目標跟蹤中。
組網雷達系統是一種新興的定位系統,針對該系統的跟蹤算法研究較少。本文研究基于組網雷達的集中式BLUE濾波器,推導在極坐標系和球坐標系的濾波模型參數,生成一種性能和實時性較好的跟蹤算法。
1組網雷達中的BLUE濾波器
推導組網雷達中的BLUE濾波模型參數前,先簡要介紹BLUE估計,它基于線性無偏最小方差準則,用于目標跟蹤時,有如下遞歸形式
(1)
(2)
其中
(3)
1.1極坐標系內的BLUE濾波模型

(4)
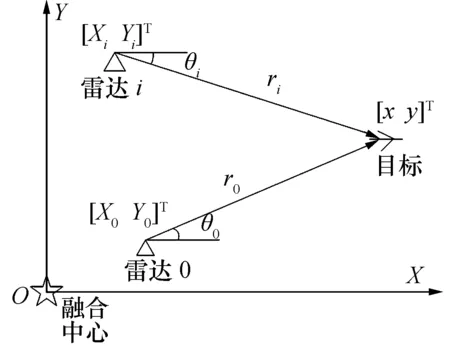
圖1 雷達組網系統觀測示意圖

(5)
式(4)中每部雷達的觀測都有誤差,觀測值與觀測誤差滿足式(6)。
(6)

(7)
基于式(6),對式(4)進行分解,得到式(8)
(8)
(9)
對于線性系統來說,其狀態方程如式(10)所示。
xk=Fk/k-1xk-1+wk
(10)

(11)
(12)

(13)
其中
(14)

(i,j=0,1,2,…,n-1; i≠j)
(15)
其中
(16)
求解S(i,i)中各個元素值。由式(12)得
(17)
(18)

(19)
計算S2i+1,2i+1的近似表達
(20)
(21)
(22)
基于式(9)的性質計算S(i,j)
(i,j=0,1,2,…,n-1; i≠j)
(23)
其中
(24)
式(23)中互協方差矩陣S(i,j)為非零矩陣,其原因在于:雖然各雷達觀測誤差彼此獨立不相關,但量測轉換誤差與目標位置估計誤差有關,導致不同雷達的量測轉換誤差之間具有相關性,即S(i,j)各元素非零,其數值大小由目標位置估計誤差和各雷達角度觀測誤差決定。分布式BLUE濾波是各雷達獨立跟蹤后對估計結果進行融合,雷達間量測轉換誤差的相關性未被考慮。因此,性能無法最優,這是集中式BLUE濾波與分布式BLUE濾波性能差異的最主要原因。
1.2球坐標系內的BLUE濾波模型

(25)
(26)
式(25)中,各部雷達的觀測都有誤差,觀測誤差為高斯隨機特性
式(25)變為
(27)

(28)
(29)
宅基地是在國家允許范圍內進行的農村房屋建設的基礎,但是隨著經濟發展,房屋的價格被哄抬,越來越多的人在城市郊區位置私自建設,這不僅不利于國家基礎設施管理,也不利于維護城市正常秩序。針對此問題,國家應該采取制度化管理,通過政策性優惠、資源補貼來吸引農民回歸正常的住宅范圍,在維護正常基礎設施過程中,以勸導方式作為主要手段,減少與人民群眾的沖突,并解決問題。人民群眾對國家的看法直接影響到國家各項建設的配合度與參與度,為了國家長久穩定應當慎重處理與農民相關的問題。
(30)





(31)




(32)

(33)
(34)
(35)
(36)
再計算S(i,j)
(i,j=0,1,2,…,n-1;i≠j)
(37)
其中
(38)
與1.1節的集中式BLUE濾波器類似,S(i,j)也是非零矩陣,即估計出雷達間量測轉換誤差的相關性。后續仿真證明S(i,j)的引入對濾波性能提升有很大幫助。
2仿真分析
為驗證所提融合式BLUE濾波器(BLUE-C)的效果,與其他方法進行仿真對比。UKF用于非線性量測的濾波跟蹤,有很好的效果;另外,文獻[24]中提出的分布式BLUE濾波器(BLUE-D)可以用于組網雷達中的目標跟蹤。因此,將本文算法(BLUE-C)與UKF及BLUE-D仿真對比。量測誤差較小時,三種算法跟蹤性能差別不大,本文只對較大量測誤差下的跟蹤性能進行仿真。場景1中,融合中心為原點,兩部雷達組網跟蹤。雷達0位于(-1 000 1 000 100)m處,雷達1位于 (10000500150)m處。目標從(-5000200005 000)m處,以200 m/s的速度沿X軸運動。X、Y軸的加速度攝動為1 m/s2,考慮目標運動中高度變化不大,Z軸加速度攝動為0.1 m/s2。所有量測誤差都是高斯白噪聲分布,雷達0的斜距測量誤差為300 m,方位、俯仰測量誤差都為5°;雷達1的斜距測量誤差為100 m,方位、俯仰測量誤差都為2°。采樣率1 Hz,運行時長為100 s,蒙特卡洛仿真500次。濾波起始時沿三個坐標軸的位置誤差為10 m,速度誤差為10 m/s,初始的濾波方差102I6×6。評價指標為位置和速度的均方根誤差(RMSE)、平均歸一化估計誤差平方(ANEES)[15]和計算復雜度。其中,ANEES用于評估算法置信度,為1時表示濾波誤差和誤差估計協方差矩陣匹配,置信度最高,濾波一致性最好。UKF的參數配置為α=0.001,β=2,κ=0。其結果如圖2所示。
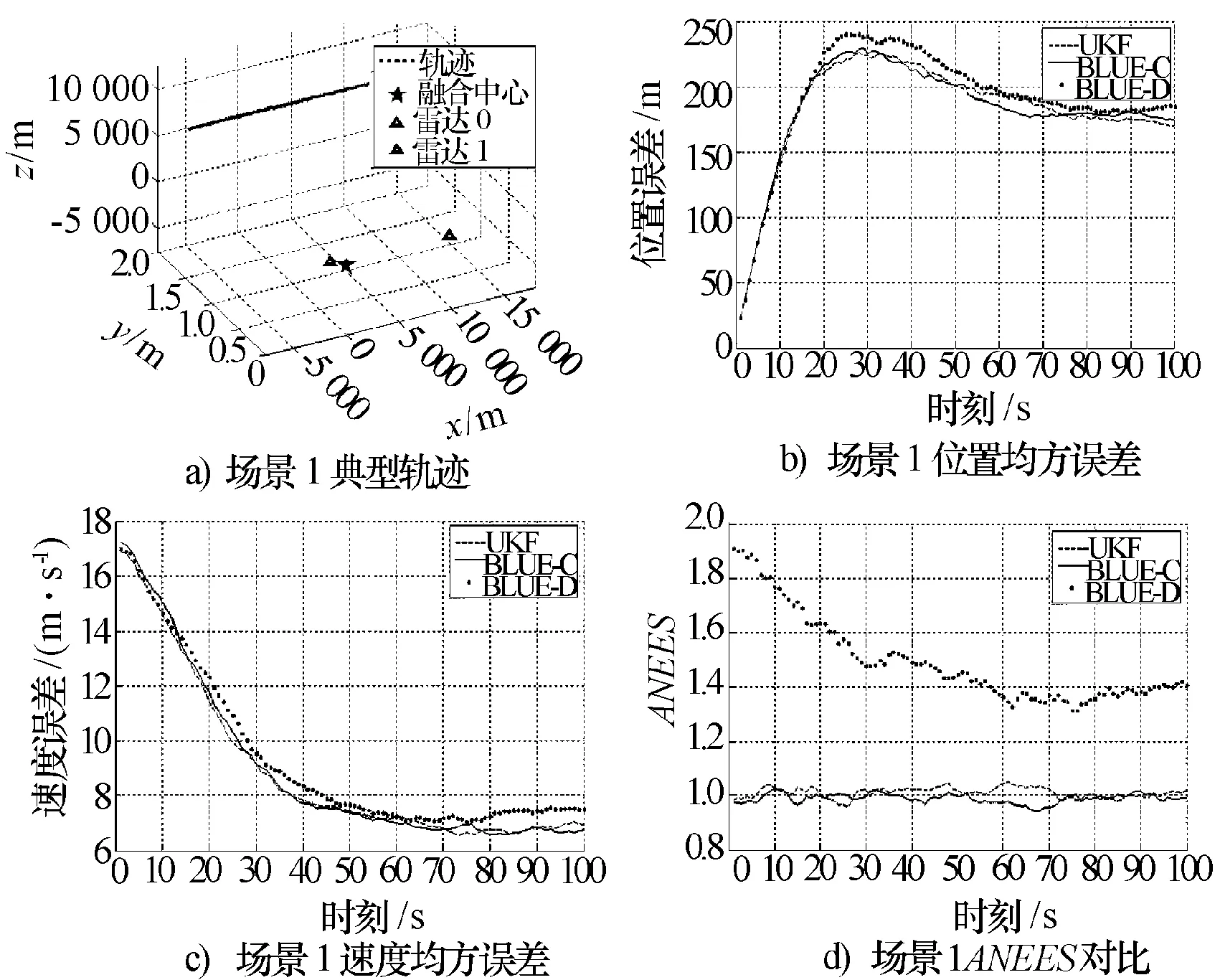
圖2 場景1的跟蹤性能對比
圖2a)中,由于加速度攝動較小,目標運動軌跡近似直線。由圖2b)和2c)可見,BLUE-C與UKF的位置、速度精度最高。在ANEES對比上,BLUE-C與UKF趨近于1,而BLUE-D的ANEES大于1,即濾波失配。
為進一步驗證算法性能,場景2中其他條件不變,只增大各坐標軸的狀態噪聲,運動時X、Y軸的加速度攝動為10 m/s2,Z軸加速度攝動增大到1 m/s2。仿真結果如圖3所示。
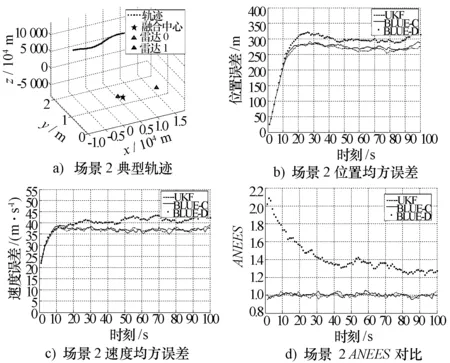
圖3 場景2的跟蹤性能對比
圖3a)中,加速度擾動的增大使得目標運動更加具有不確定性。圖3b)和3c)可見BLUE-C與UKF的位置、速度精度還是優于BLUE-D。在ANEES對比上,BLUE-C與UKF都是1,而BLUE-D濾波器失配。可見在不同狀態噪聲影響下三種算法的性能表現一致。
目標跟蹤中算法的實時性也是重要的考量指標,三種算法計算量對比結果如表1。在奔騰雙核4 GHz計算機上,Matlab 7.11環境中仿真500次的運行時間如表1所示。
表1三種算法運行時間比較s
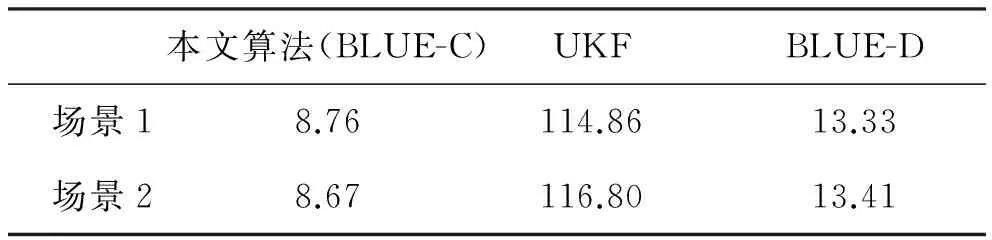
本文算法(BLUE-C)UKFBLUE-D場景18.76114.8613.33場景28.67116.8013.41
綜合以上仿真結果有以下結論:
(1)BLUE-C算法的位置、速度精度,以及濾波一致性與UKF相當。
(2)BLUE-C算法的位置、速度估計精度和濾波一致性優于BLUE-D。因為BLUE-D的輸出是各雷達獨立濾波結果的加權和,未考慮雷達間量測轉換誤差相關性的影響(式(23)、式(37)),導致估計誤差較大且濾波失配;BLUE-C在對各雷達觀測綜合時,估計出雷達間量測轉換誤差的統計特性,因此性能更佳。
(3)BLUE-C算法計算量明顯優于其他算法。UKF中用多個樣本參與濾波來逼近狀態的后驗概率密度,樣本總數為2n+1,n為狀態變量維數。本仿真中狀態變量維數為6,樣本數目為13。因此,UKF計算量近似為BLUE-C的13倍。另外BLUE-D計算量也大于 BLUE-C,原因在于:雖然BLUE-C的量測維數比BLUE-D高,但BLUE-D是多濾波器并行工作后的融合輸出,而BLUE-C基于單個濾波器,因此計算量小于BLUE-D,當參與跟蹤的雷達數目增多時,BLUE-D計算量上的優勢會更加顯著。
3結束語
BLUE濾波器在雷達或聲納系統中廣泛使用,但在組網雷達系統中尚未推廣。本文建立基于中心融合的組網雷達目標跟蹤的觀測方程,推導出二維和三維的集中式BLUE濾波器算法模型。與經典跟蹤方法的仿真對比表明:集中式BLUE方法能充分描述出組網雷達間量測轉換誤差的相關性,且基于單個濾波器跟蹤目標,因此在估計精度、一致性和計算量上有明顯優勢。不同場景中的跟蹤實驗證明其穩健實用。
參 考 文 獻
[1]韓崇昭, 朱洪艷, 段戰勝. 多源信息融合[M].2版. 北京:清華大學出版社, 2010.
HAN Chongzhao, ZHU Hongyan, DUAN Zhansheng. Multi-source information combination[M]. 2rd ed. Beijing: Tsinghua University Press, 2010.
[2]LI X R, JILKOV V P. A survey of maneuvering target tracking, part VIc: approximate nonlinear density filtering in discrete time[C]// Signal and Data Processing of Small Targets. Maryland: SPIE, 2012: 564-576.
[3]JULIER S J, UHLMANN J K. Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]// Proceedings of the 2002 American Control Conference. [S.l.]: IEEE Press, 2002: 887-892.
[4]ARASARATNAM I, HAYKIN S. Cubature Kalman filtering for continuous-discrete systems: theory and simulations[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 1254-1269.
[5]王小旭, 潘泉, 黃鶴, 等. 非線性系統確定采樣型濾波算法綜述[J]. 控制與決策, 2012, 27(6): 801-812.
WANG Xiaoxu, PAN Quan, HUANG He, et al. Overview of deterministic sampling itering algorithms for nonlinear system[J]. Control Decision, 2012, 27(6): 801-812.
[6]ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174-188.
[7]JUNSEOK K, KYOUNG M L. Wang-Landau Monte Carlo-based tracking methods for abrupt motions[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(4): 1011-1024.
[8]KIM J W, VADDI S S, MENON P K, et al. Comparison between nonlinear filtering techniques for spiraling ballistic missile state estimation[J]. IEEE Transactions on AES, 2012, 48(1): 313-328.
[9]王法勝, 魯明羽, 趙清杰, 等. 粒子濾波算法[J]. 計算機學報, 2014, 37(8): 1679-1695.
WANG Fasheng, LU Mingyu, ZHAO Qingjie, et al. Particle filter algorithm[J]. Chinese Journal of Computer, 2014, 37(8): 1679-1695.
[10]夏楠, 邱天爽, 李景春, 等. 一種卡爾曼濾波與粒子濾波相結合的非線性濾波算法[J]. 電子學報, 2013, 41(1): 150-154.XIA Nan, QIU Tianshuang, LI Jingchun, et al. A nonlinear filtering algorithm combining the Kalman filter and the particle filter[J]. Acta Electronica Sinica, 2013, 41(1): 150-154.
[11]LI T, SATTAR T, SUN S. Deterministic resampling: unbiased sampling to avoid sample impoverishment in particle filters[J]. Signal Processing, 2012, 92(7): 1637-1645.
[12]LERRO D, BAR-SHALOM Y. Tracking with debiased consistent converted measurements vs EKF[J]. IEEE Transactions on AES, 1993, 29(3): 1015-1022.
[13]MO L B, SONG X Q, ZHOU Y Y, et al. Unbiased converted measurements for tracking[J]. IEEE Transactions on AES, 1998, 34(3):1023-1027.
[14]DUAN Zhansheng, HAN Chongzhao, LI X R. Comments on ‘unbiased converted measurements for tracking’[J]. IEEE Transactions on AES, 2004, 40(4): 1374-1377.
[15]ZHAO Z L. Best linear unbiased filtering with nonlinear measurements for target tracking[J]. IEEE Transactions on AES, 2004, 40(4):1324-1336.
[16]KATKURI J R, JILKOV V P. A comparative study of nonlinear filters for target tracking in mixed coordinates[C]// 2010 42nd Southeastern Symposium on System Theory. Tyle TX: IEEE Press, 2010: 202-207.
[17]JIAO L M, PAN Q, LIANG Y. Nonlinear tracking algorithm with range-rate measurements based on unbiased measurement conversion[C]// 2012 15th International Conference on Information Fusion. Singapore: IEEE Press, 2012: 1400-1405.
[18]BORDONARO S, WILLETT P, BAR-SHALOM Y. Decorrelated unbiased converted measurement Kalman filter[J]. IEEE Transactions on AES, 2014, 50(2): 1431-1444.
[19]MAO Y H, LI X R, DUAN Zh S. Unbiased measurement model conversion for tracking with multiple radars or sonars[C]// 2012 31st Chinese Control Conference. Hefei: IEEE Press, 2012: 897-903.
[20]BORDONARO S V, WILLETT P, BAR-SHALOM Y. Unbiased tracking with converted measurements[C]// 2012 IEEE Radar Conference. Atlanta, GA: IEEE Press, 2012: 0741-0745.
[21]ZHOU G J, PELLETIER M, KIRUBARAJAN T, et al. Statically fused converted position and doppler measurement Kalman filters[J]. IEEE Transactions on AES, 2014, 50(1): 300-318.
[22]盛琥,王金根, 王立明, 等. 量測轉換卡爾曼濾波在塔康導航中的應用[J]. 信號處理, 2015, 31(1): 34-38.
SHENG Hu, WANG Jingen, WANG Liming, et al. Application of corwerted measurments Kalman flter for TACAN navigation[J]. Journal of Signal Processing, 2015, 31(1): 31-36.
[23]盛琥, 趙溫波,王立明, 等. 基于量測轉換與輸入估計的機動目標跟蹤算法[J]. 系統工程與電子技術, 2015, 37(1): 31-36.
SHENG Hu, ZHAO Wenbo, WANG Liming, et al. Naneuvering target tracking algorithm based on converted measurement and input estimation[J]. Systems Engineering and Electronics, 2015, 37(1): 31-36.
[24]付瑩, 孫永健, 湯子躍. 基于分布式BLUE的多雷達數據融合方法[J]. 計算機工程, 2013, 39(4): 45-48.
FU Ying, SUN Yongjian, TANG Ziyue. Multi-radar data fusion method based on distributed BLUE[J]. Computer Engineering, 2013, 39(4): 45-48.
盛琥男,1980年生,講師。研究方向為衛星導航、無源定位、機動目標跟蹤。
王金根男,1972年生,博士,副教授。研究方向為SAR成像技術及應用。
曹燕女,1977年生,碩士,講師。研究方向為自動控制理論。
錢正祥男,1962年生,碩士,教授。研究方向為自動控制理論。
Application of Centralized BLUE Filter in Netted Radar
SHENG Hu,WANG Jingen,CAO Yan,QIAN Zhengxiang
(The Sixth Department of Army Officer Academy,Hefei 230037, China)
Abstract:To solve the nonlinear measurements problem of target tracking by netted radar, a centralized fusion filtering scheme based on boest linear unbiased estimation(BLUE) principle is proposed. Assuming the fusion center as coordinate origin, the measurement equation of target location by multiple radars is given, the BLUE filter models for target tracking by multiple radars with spherical and polar measurements are derived separately. Theoretic analysis shows centralized BLUE filter framework can estimate not only converted measurements' statistical characteristic of single radar, but also the statistical characteristic of converted measurements from multiple radars, so it outperforms distributed BLUE filter in both tracking precision and filter credibility. Computation complexity of centralized BLUE filter is relatively low as well. Simulations for different target profiles show that the proposed algorithm is superior to others in tracking scene with different state noise levels, which makes it a competitive filtering tracking method.
Key words:netted radar; best linear unbiased estimation; non-linear filtering; converted measurements
DOI:10.16592/ j.cnki.1004-7859.2016.05.011
基金項目:安徽省自然科學基金項目(1208085QF109)
通信作者:盛琥Email:tigersh_2000@aliyun.com
收稿日期:2016-01-12
修訂日期:2016-03-28
中圖分類號:TN713
文獻標志碼:A
文章編號:1004-7859(2016)05-0042-07