兩種圖像匹配算法在植被覆蓋區(qū)的應(yīng)用對比
2016-06-15 00:38:23熊助國
安徽農(nóng)業(yè)科學 2016年8期
羅 亮, 熊助國
(東華理工大學測繪工程學院,江西南昌 330013)
?
兩種圖像匹配算法在植被覆蓋區(qū)的應(yīng)用對比
羅 亮, 熊助國
(東華理工大學測繪工程學院,江西南昌 330013)
摘要從無人機影像的特點考慮,對SIFT和SURF這兩種圖像匹配算法進行研究,利用這兩種算法對大量無人機影像進行對比較驗,比較2種算法的可靠性。結(jié)果表明,在植被覆蓋較多的地形中,SURF不但在匹配速度上優(yōu)于SIFT算子,而且在匹配對數(shù)量上也要多于SIFT算子。
關(guān)鍵詞無人機影像;圖像匹配;SIFT;SURF
筆者通過大量的試驗,采用SIFT特征預(yù)匹配、RANSAC剔除誤差的方法對無人機圖像進行處理。試驗表明,基于SIFT特征匹配的方法雖然在精度、魯棒性、穩(wěn)定性這幾個方面表現(xiàn)很好,但是SURT算法相對來說更進一步,它可以為無人機低空遙感圖像生產(chǎn)3D產(chǎn)品提供更好的技術(shù)支持。
1SIFT特征提取
SIFT(Scale-invariant feature transform)算法是在圖像匹配方面很有名的一種算法,這種算法是David lowe1999年提出來的,然后在2004年再次進行整理完善并總結(jié)得出的一種基于尺度特征的提取算法[4],能夠很好地處理圖像的旋轉(zhuǎn)、尺度的變換、仿射變換以及視角變化等問題。
1.1尺度空間的生成模擬圖像數(shù)據(jù)的多尺度特征的手段就是尺度空間理論。為了使特征具有尺度不變性,特征點的檢測是在多尺度空間完成的。尺度空間理論最早出現(xiàn)于計算機視覺領(lǐng)域時,其目的是模擬圖像數(shù)據(jù)的多尺度特征。首先是利用不同尺度的高斯核函數(shù)來構(gòu)造出高斯金字塔圖像,然后再對上下相鄰尺度的2個高斯金字塔圖像相減得到差分高斯金字塔圖像(DOG)。
高斯卷積核是實現(xiàn)尺度變換的唯一變換核,并且是唯一的線性核。所以一幅二維圖像的尺度空間定義為:
L(x,y,σ)=G(x,y,σ)*I(x,y)
(1)
其中G(x,y,σ)是尺度可變高斯函數(shù),表示為:
(2)
式中,(x,y)是空間坐標;符號“*”表示卷積;(x,y)代表圖像的像素位置,σ是尺度空間因子。高斯差分尺度空間(DOGscale-space)能夠很好地在尺度空間檢測到穩(wěn)定的關(guān)鍵點。利用不同尺度的高斯差分核與圖像卷積生成。
所以檢測結(jié)果的對數(shù)值范圍為:lg x=8.3716±0.1157,也就是:8.2559≤lg x≤8.4873
D(x,y,σ)=[G(x,y,kσ)-G(x,y,σ)]*I(x,y)=L(x,y,kσ)-L(x,y,σ)
(3)
首先是構(gòu)建圖像的高斯金字塔。將圖像金字塔共分K組,一組稱為一個Kctave,每組又分為多層,層間隔數(shù)為S,因為是先生成LOG(LaplacianoftheGaussian)金字塔,而DOG金字塔是由LOG金子塔每組的相鄰兩層相減得到的,因此有S+3(S+1+2,2代表在上下再各添一層圖像,搜索極值只在中間的S+1層圖像上搜索)層圖像,對上一組的倒數(shù)第三層圖像按照隔點采樣得到下一組的第一層圖像(如果層索引從0開始,則為第S層),這樣做是為了縮短卷積運算時間。
1.2關(guān)鍵點檢測對差分金字塔每個點相鄰尺度和上下相鄰位置的點一一進行對照比對,也就是檢測點同尺度的8個相鄰點和上下相鄰尺度對應(yīng)的9×2個點總計26個特征點進行對照比對,這樣可以保證該點在尺度空間以及二維圖像位置空間都找到極值點。如果一個點在DOG尺度空間本層以及上下兩層的26個鄰域中是最大或最小值時,就認為該點是圖像在該尺度下的一個特征點。搜索過程從每組的第二層開始,也就是從層索引為1的那一層開始,到層索引為S的層結(jié)束。

(4)
其中,尺度為每個關(guān)鍵點各自所在的尺度。
鄰域窗口是以關(guān)鍵點為中心來進行采樣,利用直方圖來統(tǒng)計鄰域像素的各個梯度方向。梯度直方圖的取值范圍在0°~360°,其中每10°為一個柱,一個柱為一個方向,總計36個方向。為了增強匹配的魯棒性,峰值大于主方向峰值80%的方向被保留下來并作為該特征點的輔方向。因此,對于同一個位置有多個峰值的情況,在相同位置和尺度創(chuàng)建多個方向不同的關(guān)鍵點。雖然含有多個方向的關(guān)鍵點僅有15%左右,但這樣可以顯著地增強關(guān)鍵點特征匹配的穩(wěn)定性。
1.4特征點描述子生成在關(guān)鍵點的中央取8×8的正方形小塊,然后在分成4×4的正方形小塊上計統(tǒng)計8個方向的梯度直方圖,把這8個梯度方向的值疊加起來就可以構(gòu)造出一個種子點,總計就有4個種子點,為了增強匹配的魯棒性,需要使用4×4共16個種子點構(gòu)成一個128維的特征描述子。此時,尺度變化、旋轉(zhuǎn)等幾何變形不利因素已經(jīng)被SIFT特征向量所剔除,接著將特征向量的模長做歸一化處理,光照變化的不利影響也被去除了。
2SURT特征提取
SURF(Speededuprobustfeatures)是一種改進了的SIFT算法,它是一種具有魯棒性的局部特征檢測算法,首先由HerbertBay等于2006年提出,并在2008年進行了完善[5]。這項技術(shù)可以應(yīng)用于計算機視覺的物體識別以及3D重構(gòu)中。
2.1積分圖像的建立SURF算法具有較好的大小縮放、平移、旋轉(zhuǎn)等特性,而且計算速度很快,積分圖像的建立大大加快了計算速度。積分圖像是對原始圖像進行積分累加計算得到的圖像。積分圖像的每一點表示為原圖像從原點到該點的矩形區(qū)域的像素和,對整幅圖像進行積分圖像遍歷后,原始圖像中的任一矩形區(qū)域的像素之和就可以通過加減運算來完成,這樣使用積分圖像可以減少很大一部分計算量,從而可以加快計算速度。
2.2尺度空間的生成SURF算法相對SIFT算法,一個較大的變化就是利用箱式濾波器來替換高斯核函數(shù),使得卷積模板全部都用簡易的矩形來構(gòu)造出來。將輸入圖像通過改變箱式濾波器的大小來對原始圖像計算得到的積分圖像進行濾波生成尺度空間。其主要作用就是對圖像進行分層,建立圖像的尺度空間,然后在不同尺度的圖像上來尋找特征點。
2.3關(guān)鍵點檢測將經(jīng)過Hessian矩陣處理過的每個像素點與其3維空間的26個點進行數(shù)值對照比對,只有當它是這26個點中的最大值或最小值時,才可以用來做為最初的特征點。并且檢測過程中用到的濾波器的大小必須與該尺度層圖像解析度是一致的,以5×5的濾波器為例,該尺度層圖像中含有25個像素點。檢測特征點必須與同層的24個像素和上下相鄰的50個像素進行對比,總計74個像素點,周圍像素的特征值如若都小于該像素點,則可以確認該點為該區(qū)域的特征點。然后,亞像素級的特征點是通過三維的線性差值法得出的,同時那些特征值小于一定閾值的點也要被刪除,檢測到的特征點數(shù)量因為增加了極值點的限制而被減少,最終檢測出來的都是很明顯的特征點。
2.4關(guān)鍵點方向分配在SURT算法中,并不是通過統(tǒng)計它的梯度直方圖,而是通過統(tǒng)計特征點領(lǐng)域內(nèi)的Harr小波特征來保證旋轉(zhuǎn)不變性。即以特征點為中心,計算半徑為6 d(d為特征點所在的尺度值)的鄰域內(nèi),統(tǒng)計60°扇形區(qū)域內(nèi)所有點在水平和垂直方向的Haar小波影響總和(Haar小波邊長取4 d),并給這些影響值賦上高斯權(quán)重系數(shù),使得靠近特征點的影響效果大,而遠離特征點的影響小,然后統(tǒng)計60°范圍內(nèi)的影響效果來形成一個新的矢量,訪問圓形區(qū)域的所有位置,最后得到的該特征點的主方向為該區(qū)域最長矢量的方向。
2.5特征點描述子生成在SURT中,和SIFT一樣也是在特征點周圍取一個正方形,正方形的邊長為20 d(d是所檢測到該特征點所在的尺度)。該正方形的方向就是上一步檢測出來的主方向。然后把這個正方形平均分為16個小塊,每個小塊統(tǒng)計25個像素相對主方向的水平方向和垂直方向的Haar小波特征。該Haar小波特征值分別為水平方向值之和,水平方向絕對值之和,垂直方向之和,垂直方向絕對值之和。這樣每個小塊就有4個特征值,所以每個特征點就是16×4=64維的向量,僅僅是SIFT的128維向量的1/2,這樣可以極大地縮短匹配時間。
3SIFT和SURF算法應(yīng)用結(jié)果分析
為了使試驗結(jié)果具有可比性,所有試驗都是在CPU為Inteli5M430 2.27hz、內(nèi)存8G、顯存1G的PC機上進行,以VS2010和OpenCV2.4.9結(jié)合編程實現(xiàn)。試驗用圖來源于某型號無人機高空航拍的圖像。
由表1可知,SURF算子在綠色植被覆蓋地表匹配效果明顯優(yōu)于SIFT,具有旋轉(zhuǎn)和尺度變化特點的無人機影像上提取特征點有明顯的優(yōu)勢。同等條件下獲取的影像配對數(shù)更多,考慮到匹配點對的成功獲取是影像匹配的首要條件,而且SURF運算速度優(yōu)于SIFT算法,其總體性能能更好地保障無人機影像的匹配,所以在綠色植被覆蓋較多的地表圖像特征提取中使用SURF法是較好的選擇。
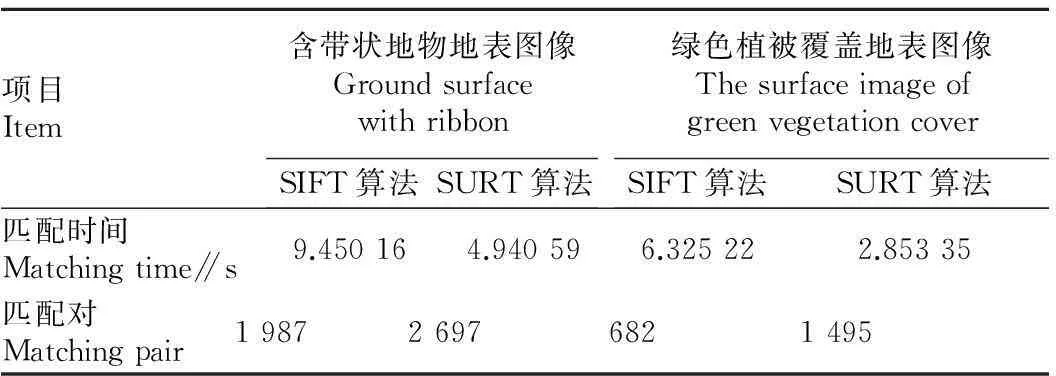
表1 SIFT和SURF算法實驗結(jié)果分析
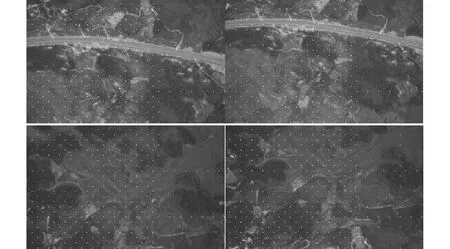
圖1 實驗用無人機高空航拍圖像Fig.1 Aerial photography image of experimental UAV
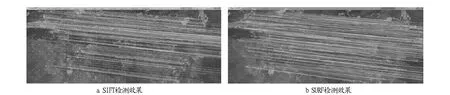
圖2 含帶狀地物地表特征圖像匹配效果Fig.2 Surface feature matching effect of strip terrain
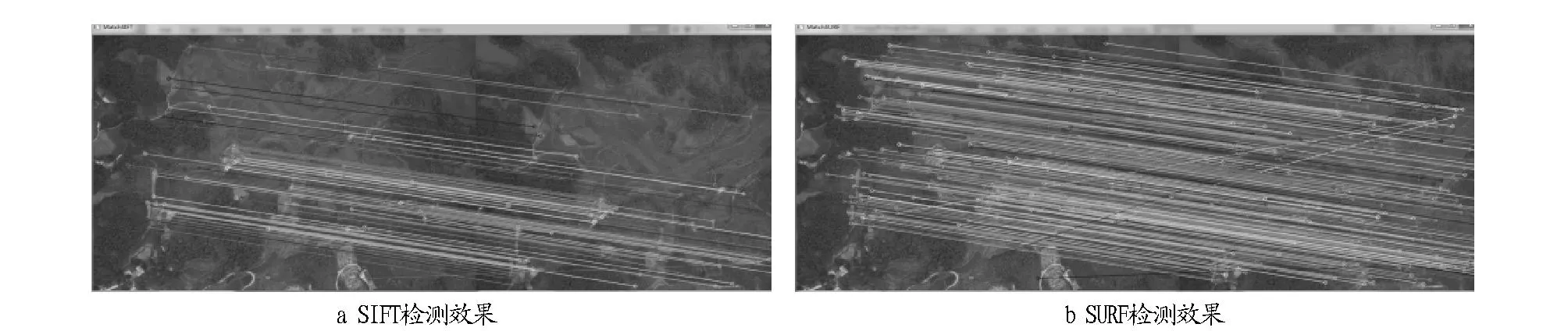
圖3 綠色植被覆蓋地表特征圖像匹配效果Fig.3 Surface feature matching effect of green vegetation cover
參考文獻
[1] 王永明,王貴錦.圖像局部不變性特征與描述[M].北京:科學出版社,2010.
[2] 李中科,楊曉輝,吳樂.針對旋轉(zhuǎn)和平移運動的一種圖像配準方法[J].應(yīng)用科學學報,2005,23(3):67-71.
[3] 張旭陽.SIFT和CenSurE在無人機影像配準的優(yōu)劣性比較[J].河南科學,2013,9(3):1417-1423.
[4] BROWN M,LOWE D G.Distinctive image features from scale-in-variant keypoints[J].International journal of computer vision,2004,60(2):91-100.
[5] BAY H,TUYTELAARS T,VAN GOOL L.SURF: Speeded up robust features[J].Computer vision & image understanding,2006, 110(3):404-417.
Comparison of Two Kinds of Image Matching Algorithm in the Area Covered by Vegetation
LUO Liang, XIONG Zhu-guo
(College of Engineering of Surveying and mapping, East China Institute of Technology, Nanchang, Jiangxi 330013)
AbstractConsidering the characteristics of the UAV image, two image matching algorithms SIFT and SURF were studied, by using these two algorithms to conduct experiment on a large number of UAV images, the reliability was compared.The results showed that in covered more vegetation terrain, SURF is better than SIFT not only in matching speed, but also in matching quantity.
Key wordsUAV image; Image matching; SIFT; SURF
作者簡介羅亮(1991- ),男,江西鷹潭人,碩士研究生,研究方向:攝影測量與遙感。
收稿日期2016-02-25
中圖分類號S 126
文獻標識碼A
文章編號0517-6611(2016)08-299-03