傾轉旋翼機模態轉換的魯棒H∞增益調度控制
2016-06-22 06:38:09蔡系海曾建平
廈門大學學報(自然科學版) 2016年3期
關鍵詞:控制
蔡系海,付 榮,曾建平
(廈門大學航空航天學院,福建廈門361005)
傾轉旋翼機模態轉換的魯棒H∞增益調度控制
蔡系海,付榮,曾建平*
(廈門大學航空航天學院,福建廈門361005)
摘要:研究了某小型傾轉旋翼無人機模態轉換階段的飛行控制問題.基于魯棒H∞控制,給出了一種模態轉換飛行的增益調度方法,其設計條件具有線性矩陣不等式(LMI)的形式.針對模態轉換飛行階段存在的操縱冗余問題,給出了一套實用的舵效分配策略.通過對該飛行器轉換模態縱向動力學系統進行仿真研究,結果表明,該方法可以確保飛行器能準確地按照預定軌跡完成模態轉換飛行,并對模型中存在的氣動參數攝動具有較好的魯棒性,且能夠有效地抑制陣風等外部擾動.
關鍵詞:傾轉旋翼無人機;控制分配;增益調度;魯棒H∞控制
傾轉旋翼機是一種獨特的飛行器,它在常規固定翼飛機的基礎上安裝了可傾轉的旋翼,因此,它既具有像直升機一樣垂直起降、懸停和低空低速飛行的能力,又具有像固定翼飛機一樣的高速和遠距離巡航能力[1].鑒于這些優勢,該機型引起了國內外研究人員的廣泛興趣,并取得了一系列成果.20世紀50年代由貝爾直升機公司設計的XV-3驗證了傾轉旋翼機的原理[2].在XV-3的基礎上,1973年該公司又設計了方案驗證機XV-15,該機型可以驗證傾轉旋翼機方案的可行性和任務的適應性[3].1983年該公司和波音公司開始研制軍用型V-22“魚鷹”[4]傾轉旋翼機.為進一步探索傾轉旋翼技術,土耳其學者Cetinsoy設計了一架油電混合動力的具有變形機翼的傾轉四旋翼無人機,在綜合考慮旋翼傾轉受力、油量變化和機翼變形的影響后,建立其非線性動力學模型,分析了該機的控制策略.Kendoul等學者針對擁有1對能夠縱向和橫向偏轉旋翼的傾轉旋翼無人機,驗證了使用雙旋翼進行懸停的可行性,并使用back-stepping方法設計了無人機的增穩和軌跡跟蹤控制器.近10年來,我國開始重視傾轉旋翼機的研究,并在旋翼/機翼氣動干擾[7-8]、旋翼/短艙/機翼耦合氣彈穩定性[9]、傾轉過程飛行控制方法[10]等方面取得了階段性成果.
傾轉旋翼機因其獨特的構造使其氣動特性和穩定性會隨著傾轉角的改變發生顯著的變化,其變化過程不僅是時變的,還是強非線性、強耦合的,整個模態轉換飛行階段存在嚴重的操縱冗余問題.國外雖已有這些方面的研究,并取得了大量的實驗數據[3],但因涉及過多的傾轉旋翼飛行器核心技術機密,并沒有太多資料可查閱.
本文以某小型傾轉旋翼無人機縱向系統模型為研究對象,采用傳統增益調度方法完成飛機模態轉換飛行控制.考慮到氣動參數攝動和陣風干擾,在各工作點設計了魯棒H∞控制器[11].針對該類飛行器既具有拉力矢量操縱又存在氣動舵操縱的復雜特性,給出了一套實用的舵效分配方案.最后,通過數字仿真驗證該控制方案的有效性.
1傾轉旋翼無人機縱向模型
1.1轉換模態縱向動力學方程
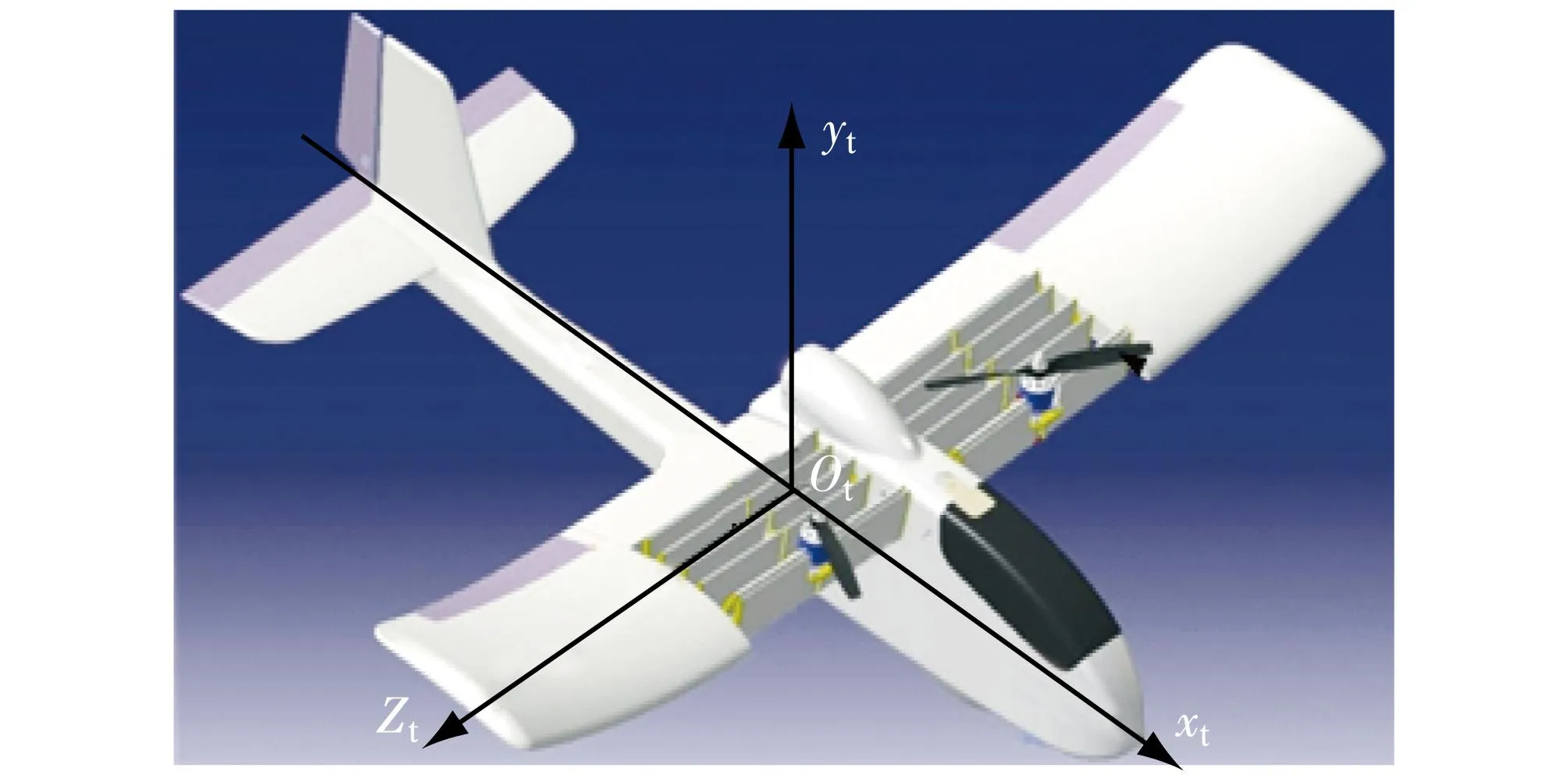
圖1 無人傾轉旋翼機機體軸示意圖Fig.1Body axis of tilt rotor unmanned aerial vehicle
傾轉旋翼無人機含有直升機模態、固定翼模態和介于兩者之間的轉換模態3種不同的飛行方式.如圖1所示,該飛行器在常規固定翼飛機機翼內側裝有可傾轉的柵板,并在兩側柵板上安裝旋翼.隨著柵板的傾轉,旋翼的方向發生改變,從而改變飛機的飛行模態.
以油門中值δpe、升降舵偏δz和傾轉角中值δte為輸入,以速度V、迎角α、俯仰角?、俯仰角速率q以及高度H為狀態量,傾轉旋翼無人機縱向動力學方程為
(1)
其中,m為飛行器的質量,Iz為俯仰轉動慣量,Fxt和Fyt為機體所受到合力在機體軸系xt和yt軸的分量,Mz為合力產生的俯仰力矩,可表示為
Mz=MzJ+MzX+MzS.
其中MzJ、MzX和MzS分別為機體氣動力、旋翼拉力以及柵板氣動力產生的俯仰力矩.
傾轉旋翼機所受的合力包括機體氣動力、旋翼拉力、機身重力以及柵板氣動力.機體阻力Q、升力L以及機體氣動力產生的俯仰力矩MzJ分別為:

其中,Cx、Cy分別為機體對應的阻力系數和升力系數,ρ為給定高度的大氣密度,S為機翼面積,mz為機體俯仰力矩系數,bA為平均氣動弦長.
左右旋翼所產生的拉力TL和TR,以及旋翼產生的俯仰力矩MzX分別為:
TL=14.75δpL-0.819,
TR=14.75δpR-0.819,
MzX=-TLcos(τLyT)-TRcos(τRyT).
其中,δpL、δpR分別表示左右油門,τL、τR分別表示左右柵板傾轉角大小,yT為旋翼拉力作用點相對重心的垂向位置.
柵板氣動力和力矩表達形式與機體氣動力及力矩表達式基本一致,只是對應的力和力矩系數不一樣,限于篇幅不再一一列出.
傾轉旋翼機根據旋翼的狀態分為3種飛行模態,不同的飛行模態對應的控制輸入也不相同.當飛機處于直升機模態時,縱向主要以δpe和δte控制為主;處于固定翼模態時,縱向控制操縱變量主要以δpe和δz為主;處于模態轉換階段時,固定翼氣動舵和直升機的旋翼拉力矢量2套操縱機制同時存在,即整個飛行過程中存在操縱冗余.傾轉角τ=0°時為固定翼飛機模態,τ=78°時為直升機模態.在模態轉換飛行階段,以τ的變化引導飛機模態的轉換.為了模態轉換平穩安全,本文采取定高模態轉換飛行.δpe和δte可以表示為:
在設計控制器時,為解決轉換飛行階段的操縱冗余問題,給出以下假設:
1.2線性不確定性模型

(2)

(3)
為了簡化控制器設計,根據假設1,引入虛擬控制輸入,則式(3)可改為

(4)

(5)
式中,E、Fa和Fb是適維已知矩陣,反映了不確定參數的結構信息,Σ為適維不確定矩陣,且滿足

其中I為單位矩陣.
參考文獻[12]方法,傾轉旋翼無人機縱向線性化不確定性模型(4)的結構參數矩陣可選為
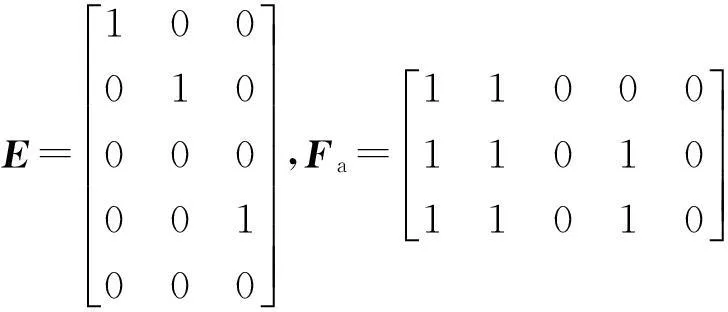
注1相比于區間描述法,上述參數不確定性刻畫的保守性較小.該方法的關鍵是找出引起參數攝動的外界因素σ和攝動參數之間的關系.這時不確定矩陣就是關于σ的一些函數,攝動結構陣E、Fa、Fb均為一些低階矩陣,可有效減小計算量.
1.3魯棒H∞控制問題
飛機在飛行過程中會受到許多環境因素的影響,從而影響飛行品質,在這里統一把這些因素以及未建模動態視為系統的外部擾動,則系統(3)可改進為

(6)
其中,B1為擾動輸入矩陣,w為外部擾動信號.
對于任意給定的h>0,設w滿足
對給定的加權陣Q≥0和R>0,標量γ>0,H∞控制是指設計控制器u=Kx,使閉環系統內穩定,且對于任意給定的h>0,有

(7)
加權矩陣可用來調節干擾抑制效果和控制輸入指令之間的關系,γ(>0)越小意味著系統對w的抑制性能越好.定義被控輸出信號為

(8)
聯立方程(6)和方程(8),可得廣義被控對象為
(9)

2傾轉旋翼無人機魯棒H∞增益調度設計
傾轉旋翼無人機隨著傾轉角的改變動力學特性發生較大變化,而增益調度(gain-scheduling)控制被認為是處理該類控制問題十分有效的方法[13].
增益調度的基本思想是:先選取能夠覆蓋整個飛行包線的工作點,并通過小擾動線性化得到各工作點處線性模型;然后使用線性控制理論設計相應的控制器使其滿足一定的飛行品質標準;最后將所得控制器采用切換或插值擬合的方法擬合成一個含有調參變量的全局控制器,進而實時調節控制器增益以適應飛機動力學模型的變化.根據上文對傾轉旋翼無人機模型的分析,針對各工作點的線性化模型,本文采用魯棒H∞增益調度的設計方法.
2.1魯棒H∞增益調度設計
在綜合考慮了傾轉旋翼無人機模態轉換飛行階段存在參數攝動、外部干擾和本身復雜的氣動特性情況下,設計魯棒H∞增益調度控制器,使得該飛行器能按照預定的軌跡完成模態轉換飛行,并能有效地處理參數不確定問題和抑制外部擾動.整個飛行過程以傾轉角τ為調參變量,控制系統結構圖如圖2所示.
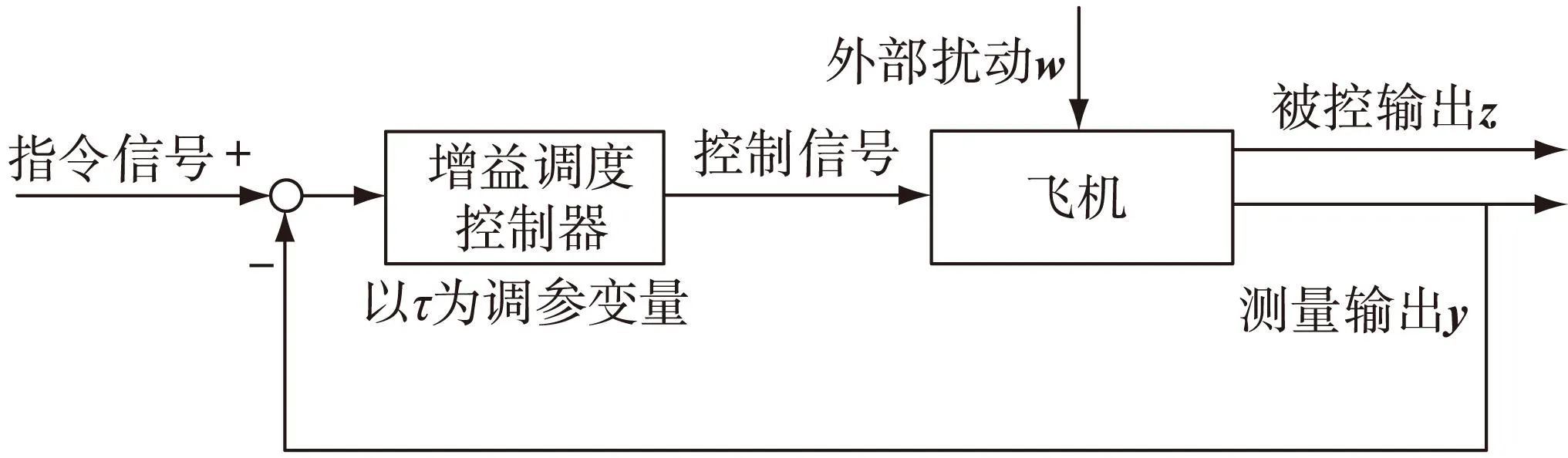
圖2 控制系統結構圖Fig.2Block diagram of control system
引理1[14]設Y為對稱矩陣,N1,N2為適維常值矩陣,Σ為適維不確定性矩陣,且滿足ΣTΣ≤I,則以下命題等價:
1) Y+N1ΣN2+(N1ΣN2)T<0,
應用引理1和有界實引理,可建立廣義被控對象(9)的魯棒H∞增益調度控制的可解性條件.
定理1給定擾動抑制水平γ>0,如果存在正定對稱矩陣X和W,正常數ε,使得不等式
<0
(10)

進而,如果X*,W*是矩陣不等式(10)的一個可行解,則K=W*(X*)-1是系統(9)的一個狀態反饋H∞控制器增益矩陣.
證明對于系統(9),采用狀態反饋u=Kx,則閉環系統為
(11)
其中,Ac=A+B2K,Cc=C1+D12K,ΔAc=EΣFc,Fc=Fa+FbK.
由有界實引理易知,若存在對稱正定矩陣P,使得
(C1+D12K)T(C1+D12K)+PEΣFc+
(EΣFc)TP<0
(12)
成立,則系統(11)內部漸近穩定,且H∞范數小于γ.
由引理1知式(12)等價于
(C1+D12K)T(C1+D12K)+εPEETP+

(13)
對上式兩端同乘P-1,并令P-1=X,W=KX,則
D12W)T(C1X+D12W)+εEET+ε-1(FaX+
FbW)T(FaX+FbW)<0.
(14)
根據Schur補引理可知,不等式(14)等價于線性矩陣不等式(10).證畢.
以傾轉角τ為控制器增益調參變量,選取s個平衡點作為工作點.按照定理1設計魯棒H∞控制器,設每個工作點的控制器為
u=Klx,l=1,2,…,s.
(15)
對于所求得的控制器增益Kl,以τ為自變量,利用插值擬合的方法得到全局控制器增益矩陣結構如下:

(16)
2.2控制分配

1) 在τ>60°時,速度較小,升降舵效低,虛擬升降舵指令完全分配給傾轉角中值控制無人機的俯仰運動;15°<τ≤60°時,虛擬升降舵指令經過比例分配,產生實際的升降舵指令和傾轉角指令,實現對俯仰運動的混合控制;0°≤τ≤15°時,此時飛行速度較大,傾斜角中值控制效率低,完全采用升降舵控制飛機的俯仰運動.
2) 整個模態轉換階段虛擬油門指令產生實際所需的油門中值指令.
設虛擬升降舵將操作效率的Kz(τ)倍由升降舵承擔,將操作效率的KTz(τ)倍由δte承擔,則可確定操作效率分配系數如下:
KTz(τ)=
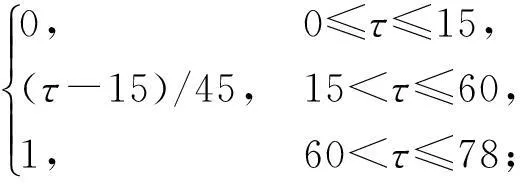
(17)
Kz(τ)=1-KTz(τ).
(18)


(19)
(20)
式(20)中,Kδz、Kδte分別表示虛擬升降舵到升降舵和傾轉角中值的傳遞系數,表示為

表1 控制器增益調度表
注:τ=78°時對應的模態即為直升機模態,表示由固定翼向直升機模態傾轉完成.
3仿真及分析
某傾轉旋翼無人機的基本參數如下:m=2kg,Iz=0.051 4kg·m2,bA=0.21m,S=0.233m2,yT=0.055m,ρ=1.225kg/m3.以傾轉角τ每傾轉5°作為一個工作點,按照定理1設計魯棒H∞控制器,得到控制器增益調度表,如表1所示.
根據增益調度表,使用插值的方法,以傾轉角τ為調參變量,擬合得到控制器增益調參曲線表達式如下:
K11=-1.017×10-4τ3+3.822×10-3τ2-
0.194τ+14.73,
K12=4.491×10-5τ4-5.538×10-3τ3+
0.243τ2-5.422τ-128.6,
K13=-2.831×10-5τ4+3.977×10-3τ3-
0.216τ2+6.578τ+217.1,
K14=1.582×10-5τ4-1.98×10-3τ3+
0.077τ2-0.929τ+9.458,
K15=-1.157×10-5τ4+1.507×10-3τ3-
0.063τ2+1.193τ+15.9,
K21=2.377×10-4τ3-0.018τ2+0.248τ-
15.45,
K22=-4.962×10-5τ4+7.573×10-3τ3-
0.318τ2+4.256τ-110,
K23=4.997×10-5τ4-8.626×10-3τ3+
0.386τ2-5.322τ+201.9,
K24=-2.804×10-4τ3+0.024τ2-0.512τ+
11.23,
K25=-1.345×10-4τ3+3.55×10-3τ2-
0.051τ+13.64.
同時,按照第3部分所給出的分配策略,得到控制分配系數為
將所得到的虛擬操縱舵面指令按給出的控制分配策略分配給實際操縱面,用于驅動飛行器運動,以驗證所設計控制器的性能.具體指令為:隨著飛機以直升機模式加速前飛,柵板以1(°)/s向前傾轉,傾轉旋翼機開始從直升機模態向固定翼模態過渡,78s后轉入固定翼飛行并短暫飛行10s,再由固定翼模態反向過渡到直升機模態,在t=166s時飛機轉換模態飛行完成,傾轉旋翼機進入直升機模態且保持3m/s勻速飛行14s,全程仿真時間180s.
此外,整個仿真過程中氣動力系數Cx、Cy及力矩系數mz反向引入30%的參數攝動,且在t=50s時加入幅值為2m/s的半正弦陣風,作用時間3s.狀態初始值取為:V=3m/s,α=?=0.026 5rad/s,q=0,H=20m.仿真結果如圖3~10所示.
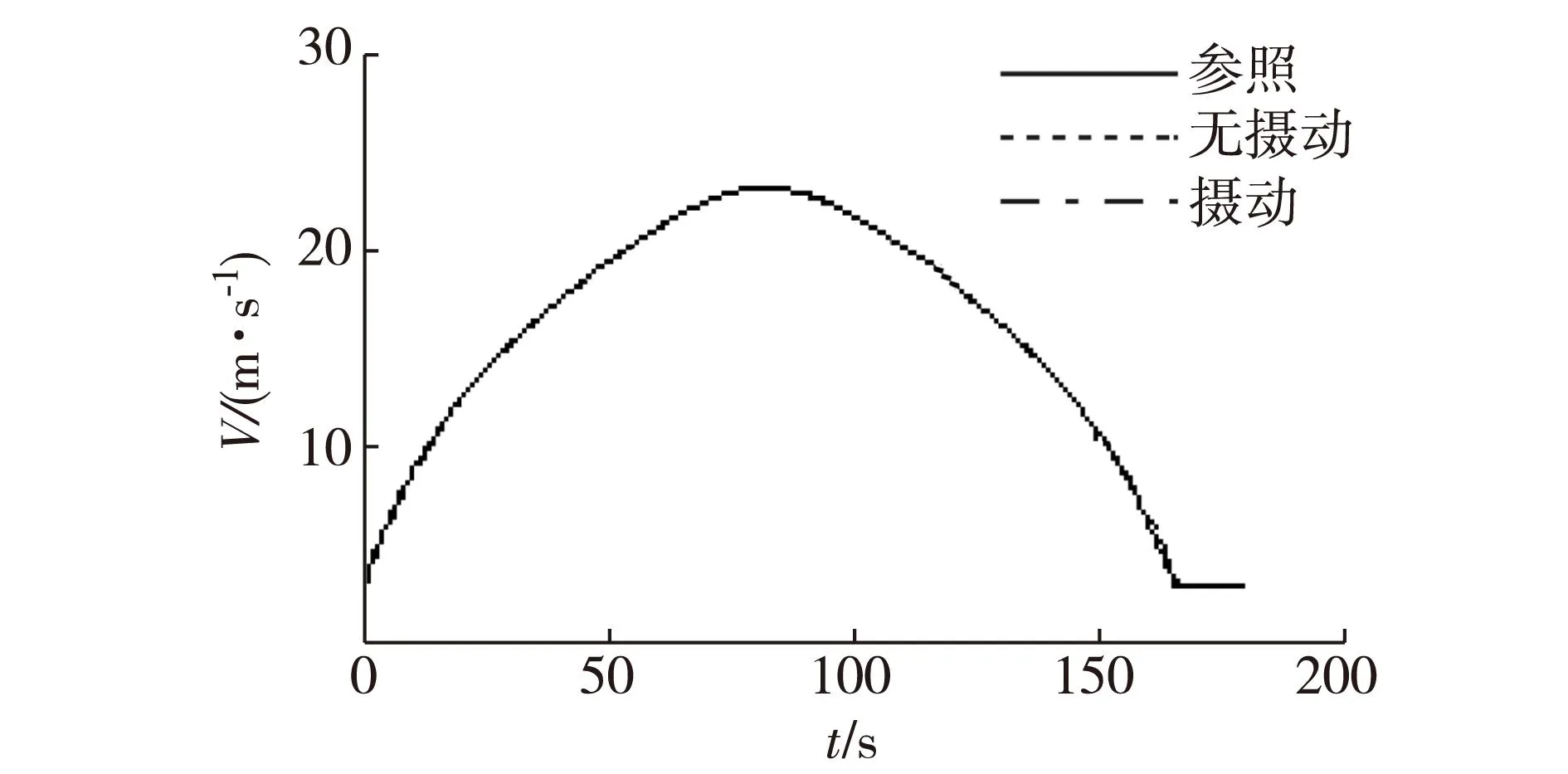
圖3 速度指令跟蹤曲線Fig.3Velocity command tracking curve
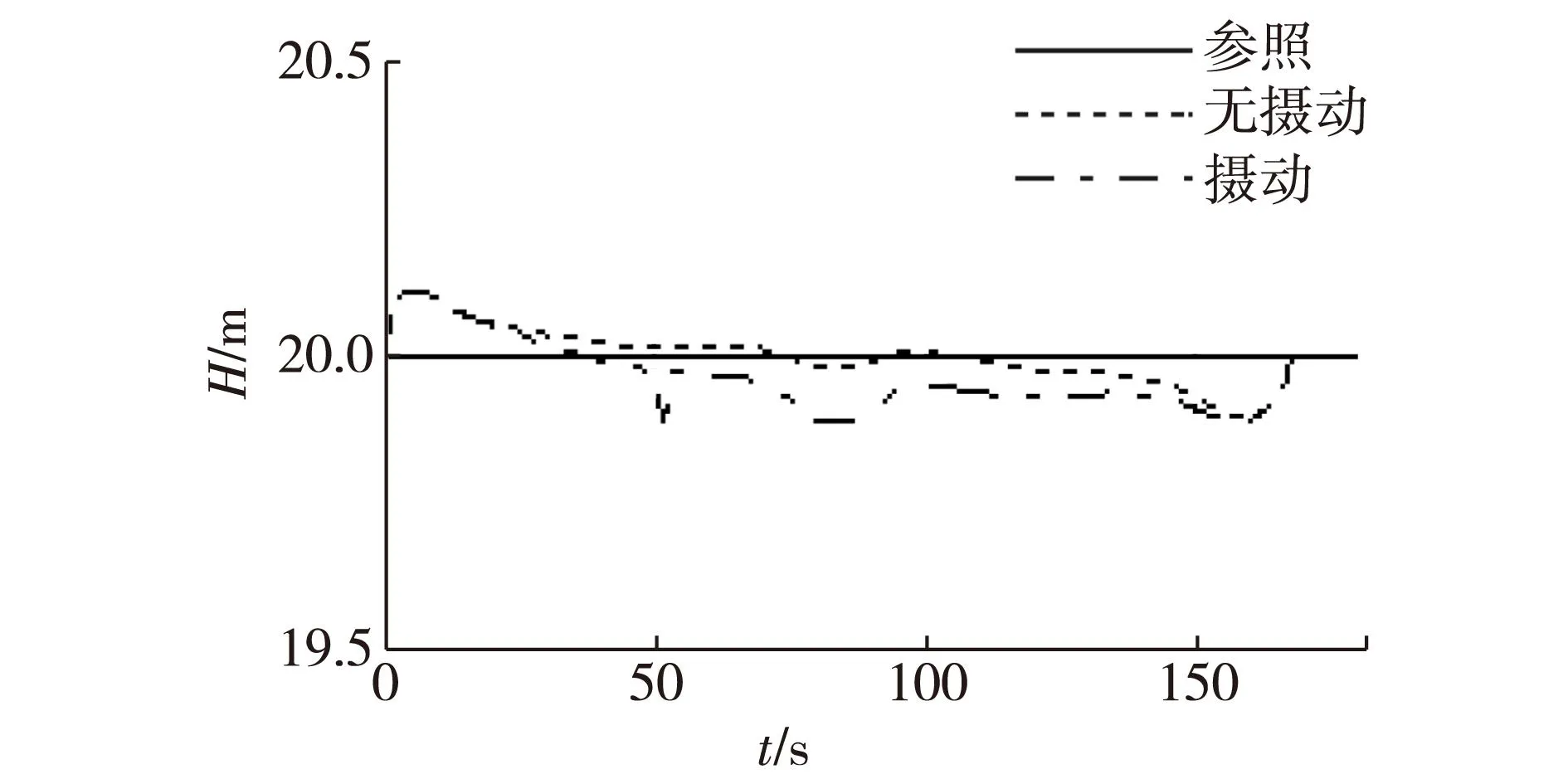
圖4 高度指令跟蹤曲線Fig.4Altitude command tracking curve
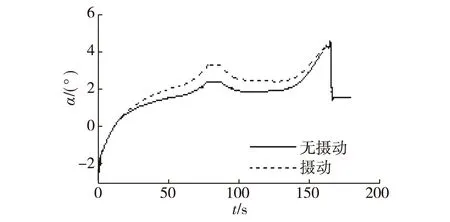
圖5 迎角響應曲線Fig.5Angle of attack response curve
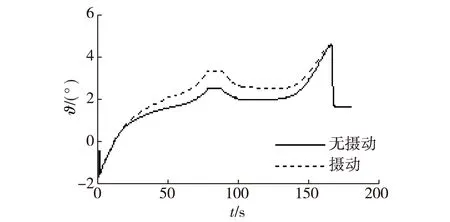
圖6 俯仰角響應曲線Fig.6Angle of pitch response curve
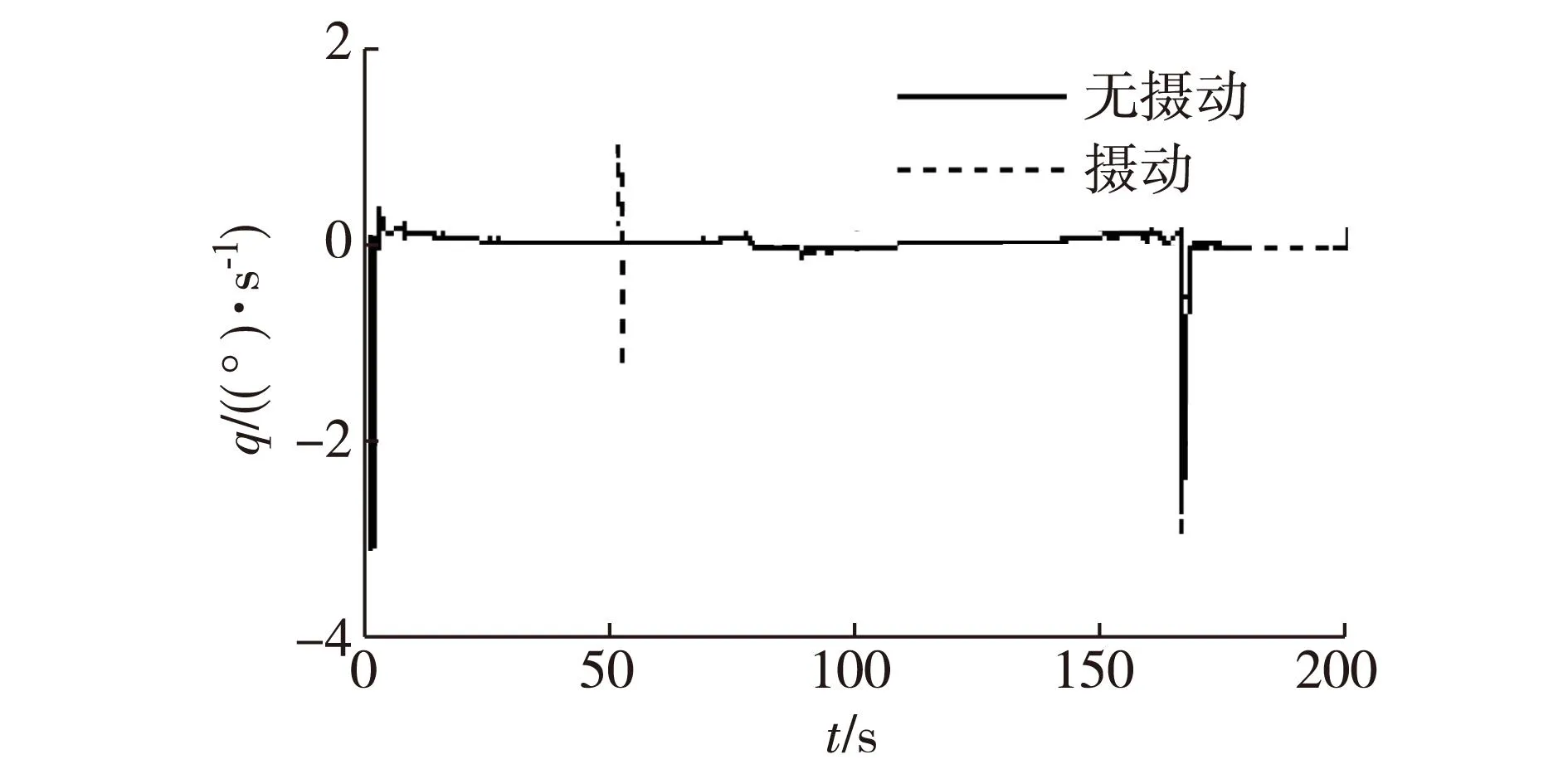
圖7 俯仰角速率響應曲線Fig.7Angle of pitch rate response curve
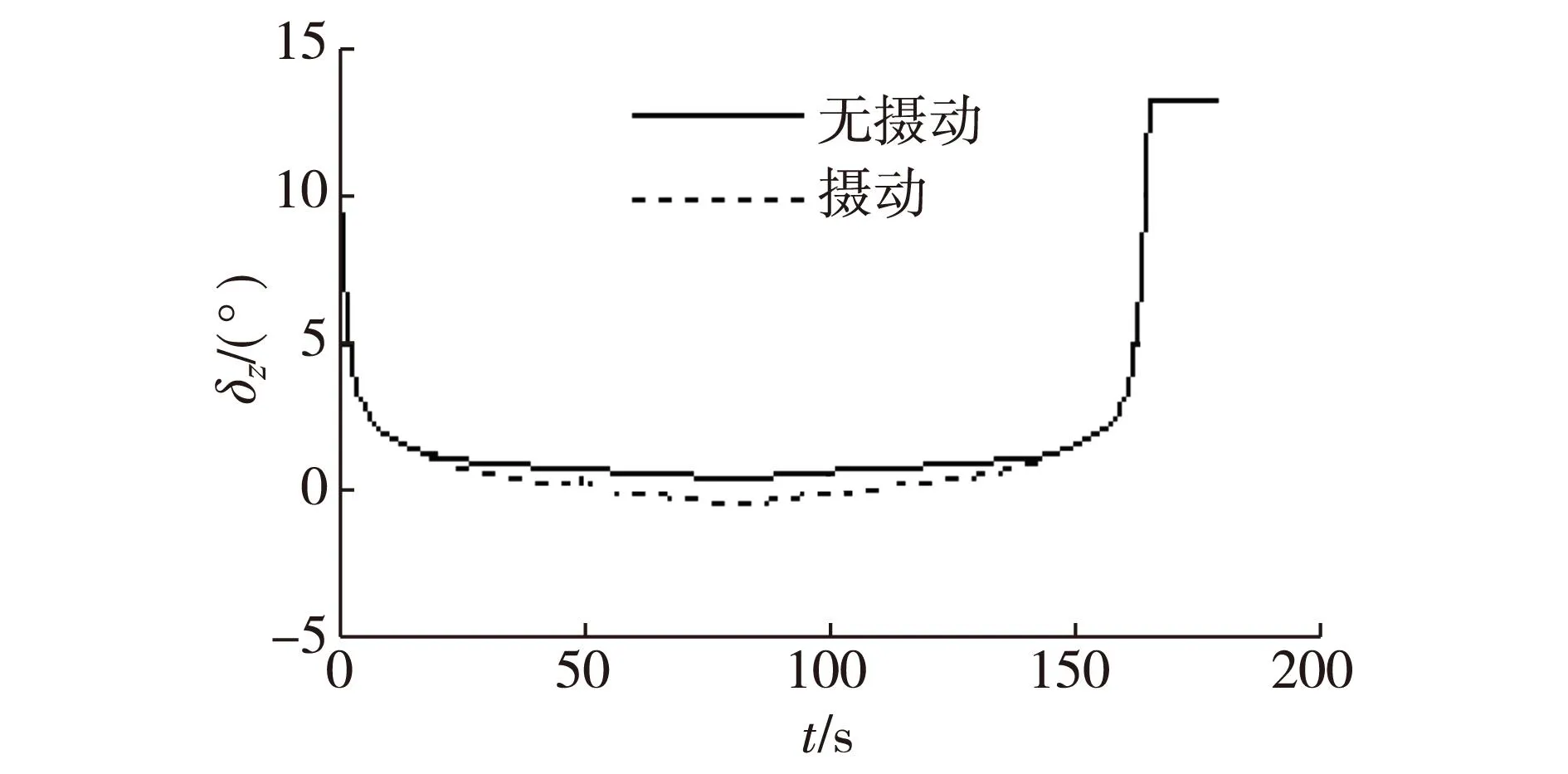
圖8 升降舵偏角響應曲線Fig.8Elevator deflection response curve
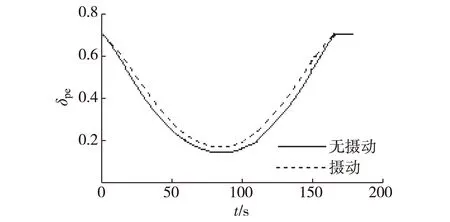
圖9 油門開度響應曲線Fig.9Throttle response curve
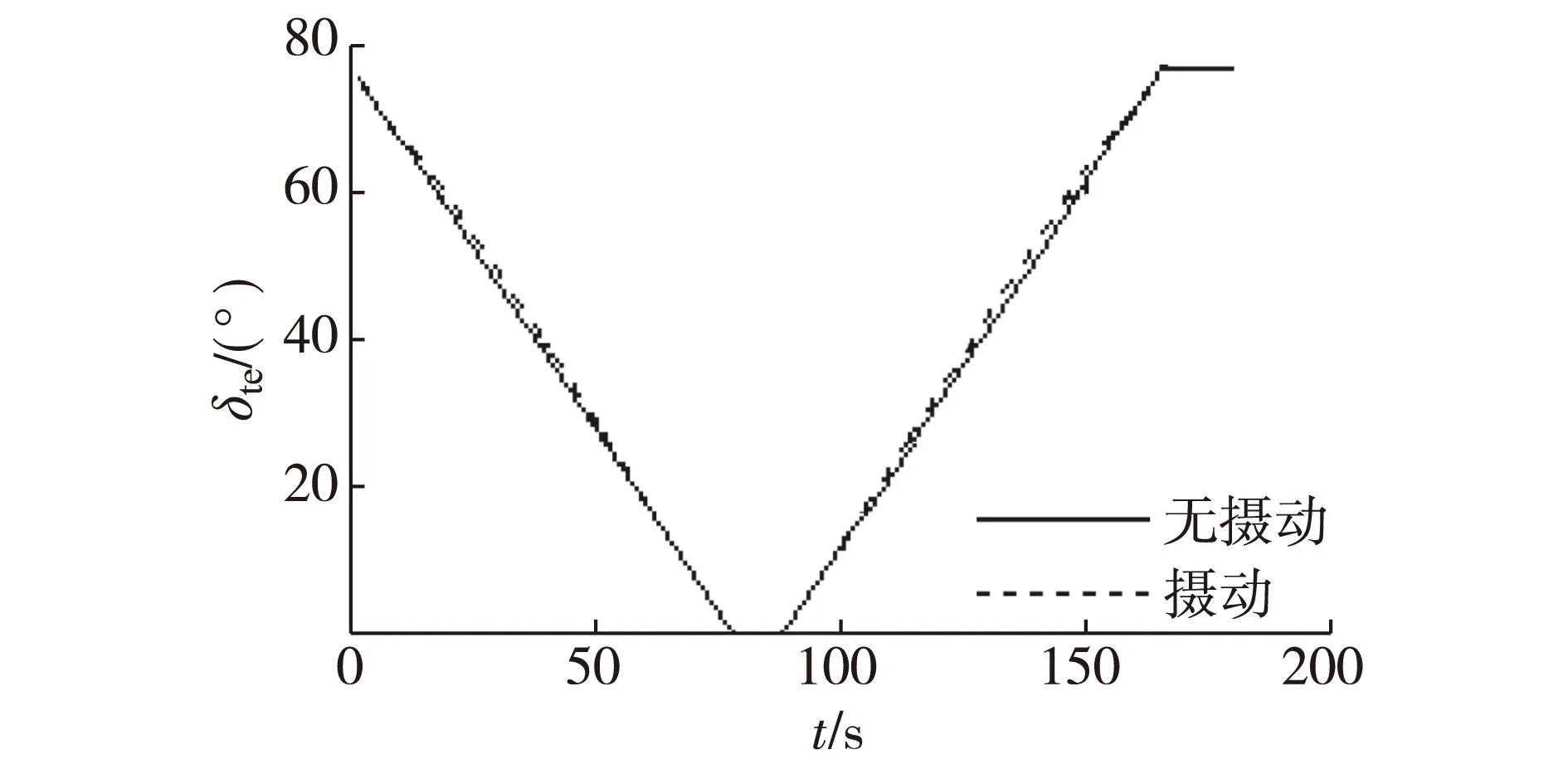
圖10 傾轉角中值響應曲線Fig.10Tilting angle response curve
針對傾轉旋翼無人機縱向運動不含參數攝動和含攝動、陣風干擾的2種情況,圖3和圖4分別給出了魯棒控制器作用下V和H的跟蹤效果,圖5~7分別給出了飛行器α、?和q的響應結果,圖8~10分別給出了δz、δpe以及δte控制輸入響應.
分析圖3~7可知:
1) 當系統模型存在較大的不確定性以及陣風干擾時,系統的動態性能雖然受到一定的影響,但最終速度跟高度的跟蹤誤差能得到消除;
2) 由于氣動參數反向攝動,為了提供足夠的氣動力,α有所增大,?也相應增加,但變化都在安全范圍內,整個過渡階段平滑穩定,表明本文所設計的控制器具有較好的魯棒性及抗干擾能力.
分析圖8~10可知,δz、δpe以及δte都較合理,表明控制器設計的優良性.
綜上分析,本文設計的魯棒H∞增益調度控制器能有效地處理氣動參數攝動和陣風引起的干擾,并能確保傾轉旋翼無人機按預定的軌跡完成模態轉換飛行.
4結論
本文研究了某小型傾轉旋翼無人機模態轉換飛行階段的飛行控制問題,針對該類飛機的強非線性、強耦合和時變等特性,將增益調度策略應用于控制器設計.考慮到模態轉換飛行過程中存在著較大的參數攝動和陣風干擾,基于平衡點線性化模型設計了單個工作點的魯棒H∞控制器,并將控制器求解條件轉化為求解線性矩陣不等式(LMI).此外,為了解決模態轉換飛行時存在的操縱冗余問題,文中還給出了一套舵效分配控制方案.仿真實驗表明,文中方法設計的傾轉旋翼無人機模態轉換飛行控制系統滿足性能指標要求,對系統模型中的參數攝動具有較好的魯棒性,可有效抑制陣風等外部干擾.
[1]楊軍,吳希明,凡永華等.傾轉旋翼機飛行控制[M].北京:航空工業出版社,2006:1-37.
[2]THOMPSONTH.ThebellhelicopterXV-3andXV-15experimentalaircraft[R].WashingtonDC:AIAA,1990.
[3]MAISELMD,GIULIANETTIDJ,DUGANDC.ThehistoryofXV-15tiltrotorresearchaircraftfromconcepttoflight[R].WashingtonDC:NASAAmesResearchCenter,2000.
[4]蔡婧,蔡汝鴻.V-22“魚鷹”傾轉旋翼機研制歷程與關鍵技術[J].航空科學技術,2013,3(1):11-14.
[5]CETINSOYE.Designandmodelingofagas-electrichybridquadtilt-rotorUAVwithmorphingwing[C]∥Proceedingsof2014IEEEInternationalConferenceonMechatronicsandAutomation.Tianjin,China:IEEE,2014:1193-1198.
[6]KENDOULF,FANTONII,LOZANOR.Modelingandcontrolofasmallautonomousaircrafthavingtwotiltingrotors[C]∥Proceedingsofthe44thIEEEConferenceonDecisionandControl,andtheEuropeanControlConference.Seville,Spain:IEEE,2005:8144-8149.
[7]曹蕓蕓.傾轉旋翼飛行器旋翼對機翼向下載荷計算模型[J].航空動力學報,2011,26(2):468-147.
[8]郭建東,宋彥國.小型無人傾轉旋翼機氣動與操縱特性實驗研究[J].空氣動力學報,2013,33(1):107-112.
[9]DONGLH,YANGWD,XIAPQ.Multi-bodyaeroelasticstabilityanalysisoftiltrotoraircraftinhelicoptermode[J].TransactionsofNanjingUniversityofAeronautics&Astronautics,2006,23(3):161-167.
[10]郭劍東,宋彥國.小型無人傾轉旋翼機全模式飛行操縱控制[J].南京航空航天大學學報,2009,41(4):439-444.
[11]張達敏,張霄力.連續區間系統的魯棒H∞控制:LMI方法[J].廈門大學學報(自然科學版),2009,48(5):651-655.
[12]李忠建.大包線飛行控制系統魯棒設計研究[D].西安:西北工業大學,2000:36-37.
[13]熊治國,董新民.程序調參飛行控制規律的研究與展望[J].飛行力學,2003,21(4):9-13
[14]俞立.魯棒控制——線性矩陣不等式處理方法[M].北京:清華大學出版社,2002:86-91.
Robust H∞Gain-scheduling Control for Mode Conversion of Tilt Rotor Aircrafts
CAI Xihai,FU Rong,ZENG Jianping*
(School of Aerospace Engineering,Xiamen University,Xiamen 361005,China)
Abstract:This paper is concerned with the flight control problem for small tilt rotor unmanned aerial vehicles (UAV) during conversion flights.Based on the robust H∞control,a gain scheduling method is given,and the design condition is in the form of linear matrix inequality (LMI).Moreover,for the purpose of handling the control-redundancy problem,a set of practical allocation strategies is provided.Finally,aimed at the conversion flight control of the aircraft,a simulation is carried out on the longitudinal dynamical model.It shows that aircraft can complete the conversion-mode flight accurately along the predetermined trajectory,and the controller is not only robust to variations of the aerodynamic parameters,but also valid for the suppression of gust disturbances.
Key words:tilt rotor aircraft;control allocation;gain-scheduling;robust H∞control
doi:10.6043/j.issn.0438-0479.2016.03.014
收稿日期:2015-10-21錄用日期:2015-11-20
基金項目:國家自然科學基金(61374037);中央高校基本科研業務費專項(20720150177)
*通信作者:jpzeng@xmu.edu.cn
中圖分類號:V 249.1
文獻標志碼:A
文章編號:0438-0479(2016)03-0382-08
引文格式:蔡系海,付榮,曾建平.傾轉旋翼機模態轉換的魯棒H∞增益調度控制.廈門大學學報(自然科學版),2016,55(3):382-389.
Citation:CAI X H,FU R,ZENG J P.Robust H∞gain-scheduling control for mode conversion of tilt rotor aircrafts.Journal of Xiamen University(Natural Science),2016,55(3):382-389.(in Chinese)
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17