BP模糊神經網絡純電動汽車電機控制
2016-06-22 05:41:50盤朝奉
河南科技大學學報(自然科學版) 2016年4期
關鍵詞:控制策略
陳 燎,丁 猛,盤朝奉,b
(江蘇大學 a.汽車與交通工程學院;b.汽車工程研究院,江蘇 鎮江 212013)
?
BP模糊神經網絡純電動汽車電機控制
陳燎a,丁猛a,盤朝奉a,b
(江蘇大學 a.汽車與交通工程學院;b.汽車工程研究院,江蘇 鎮江 212013)
摘要:針對傳統比例積分(PI)控制在電機控制中控制效果不良的問題,設計了一種基于向后傳播算法(BP)模糊神經網絡的PI控制器。基于MATLAB/Simulink建立了純電動汽車驅動系統的仿真模型,將駕駛員操作與電機驅動聯系起來,在自主研發的整車慣性模擬臺架上進行試驗。仿真和試驗結果均表明:在ECE城市工況下,采用BP模糊神經網絡控制的純電動汽車實際車速能較好地跟隨工況需求車速,速度偏差在±2 km/h以內。
關鍵詞:純電動汽車;電機控制;神經網絡;控制策略;循環工況測試
0引言
隨著傳統汽車引起的污染和能源問題日益突出,電動汽車成為代替傳統汽車的研究熱點。無刷直流電機因其一系列優點而備受汽車行業的關注,因此,對電機高效控制的研究有較大的現實意義。合適的電機控制策略可以提高電機工作效率,減少能量消耗,進而提高電動汽車行駛里程。傳統比例積分(proportional integral,PI)控制因結構簡單和有效得到廣泛應用,但它對變化參數和非線性問題不能有效控制。采用無刷直流電機的純電動汽車的控制是多變量和非線性的,因此,一些智能控制算法被加入控制系統中。文獻[1]采用模糊控制策略對無刷直流電機進行控制,充分利用了模糊控制對非線性問題的處理能力,但實時跟隨效果不好。文獻[2]基于模糊控制提出了采用遺傳算法自適應模糊控制,容易收斂于局部最優解,且計算時間較長。文獻[3]提出了基于徑向基核函數(radial basis function,RBF)神經網絡的電機控制策略,通過神經網絡的學習能力和適應能力提高控制精度并加快響應速度,但神經網絡在處理數據時會出現數據病態問題。
為實現對目標車速的精確跟隨,從而降低純電動汽車的能量損耗,本文采用向后傳播算法(back propagation,BP)模糊神經網絡對PI控制器參數進行在線整定[4],并建立了純電動汽車仿真模型,對控制效果進行仿真,最后在實驗室自主研發的整車慣性模擬臺架上進行試驗。通過仿真和試驗來驗證BP模糊神經網絡控制的優越性。
1系統框架結構
系統框架由室內臺架、電機、電機驅動器、動力電池、控制計算機和測試控制器構成,如圖1所示。圖1中,MCU為電機控制器,M為電機,DA為數字模擬轉換,CAN H為CAN總線高位數據線,CAN L為CAN總線低位數據線。采用自主研發的整車慣性模擬試驗臺架,該臺架采用雙輪對滾方式傳遞驅動輪扭矩及模擬滾動阻力,利用兩個飛輪模擬整車慣量,飛輪根據轉速能自動加載整車慣性,從而能夠真實模擬電動汽車在行駛過程中的加速阻力。試驗臺架結構如圖2所示。控制計算機加載“電動汽車循環工況自動跟蹤測試系統”監控軟件,測試控制器由單片機開發,模擬“駕駛機器人”傳感器和執行器。傳感器采集加速及制動踏板開度,執行器負責與控制計算機和電機控制器網絡通信,并將加速和制動踏板開度信號轉換成電壓信號傳給電機控制器。
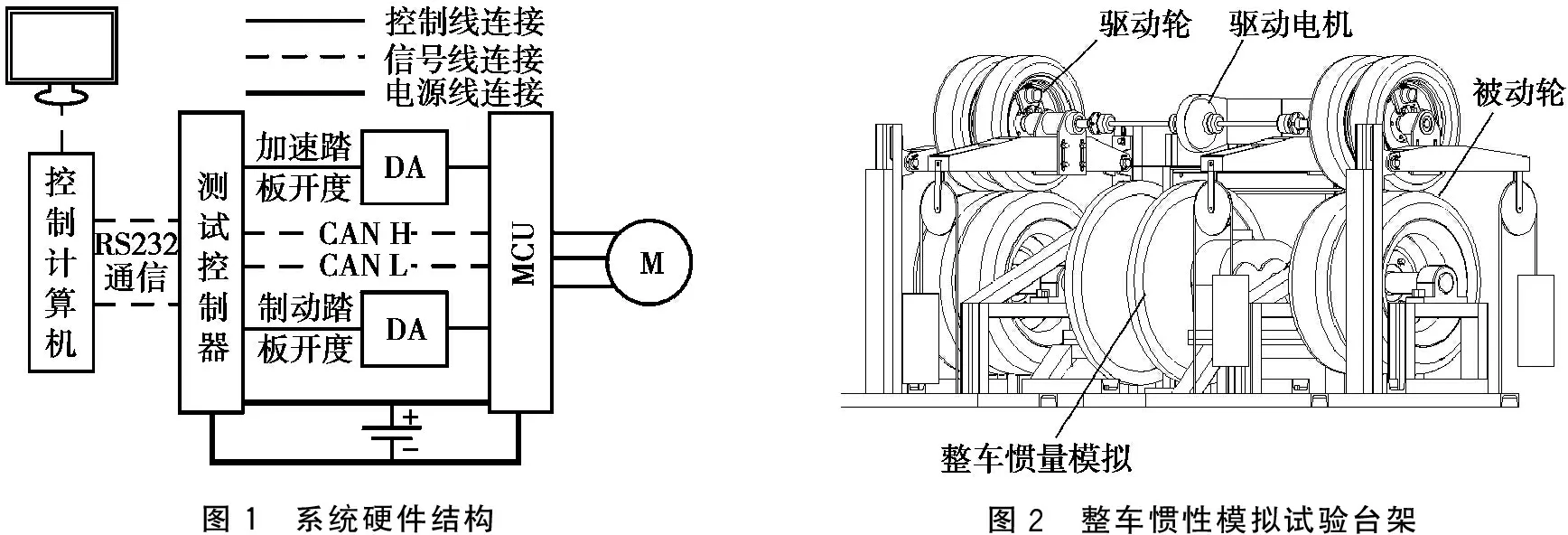
圖1 系統硬件結構圖2 整車慣性模擬試驗臺架
進行試驗前,控制計算機讀入聯合國歐洲經濟委員會(economic commission of Europe,ECE)汽車法規城市工況[5]的速度數據。由于工況停車時間過長,為增加工況循環測試次數,取消停車時間段。試驗所需電機、電池、電機控制器等器件均為某款微型純電動汽車的標配部件。試驗數據采集采用總線開發環境(CAN open environment,CANoe),數據分析及處理采用自主開發的“電動汽車循環工況自動跟蹤測試系統”監控軟件。
2整車模型建立
基于ADVISOR純電動汽車仿真軟件,運用MATLAB/Simulink軟件建立純電動汽車仿真模型[6-9]。仿真車輛的參數為:電動汽車總質量5 950 kg,主減速比6.836 6,輪胎半徑0.385 m,空氣阻力因數CD=0.56,迎風面積A=4.4 N·m,滾動阻力因數0.013,旋轉質量換算因數1.05,機械效率0.90;無刷直流電機額定電壓210 V,額定電流190 A,額定轉速3 600 r/min,額定功率47.27 kW,最大功率157.5 kW,額定轉矩120 N·m,電動勢因數Ce=0.077 43,轉矩因數Ct= 0.874 6。
2.1動力學模塊
汽車運行過程中,始終滿足汽車動力學方程。因此,汽車在任意時刻,動力系統需要提供的驅動力可由式(1)~式(3)計算得出[10-11]。在動力學模塊中輸入汽車總質量、車速和坡度信號,通過計算得到總驅動力F、空氣阻力、滾動阻力和坡道阻力,計算得到電機阻力矩T為電機的輸入負載。
∑F=Ff+Fw+Fi+Fj;
(1)
(2)

(3)
其中:m為整車質量,kg;f為滾動阻力因數;T為電機阻力矩;i0為主減速器傳動比;ηt為機械效率;A為迎風面積,m2;CD為空氣阻力因數;α為坡度角,(°);u為車速,km/h;δ為旋轉質量換算因數,δ>1。
2.2電機及控制器模塊
無刷直流電機具有結構簡單、可靠性高和功率效率高等優點,同時,滿足純電動汽車所要求的低速恒轉矩、高速恒功率的特性[12-14]。仿真模型主要包括6個模塊:霍爾位置信號處理模塊、感應電動勢模塊、電流模塊、電磁轉矩模塊、逆變器模塊和脈沖寬度調制(pulse width modulation,PWM)控制模塊。
2.3駕駛員模塊
汽車運行過程中,駕駛員提出的目標車速和汽車實際車速的差值作為負反饋輸入控制系統。要求實際車速對目標車速實時跟隨,當目標車速大于實際車速時,需要踩下踏板加速;當目標車速小于實際車速時,需要松開踏板減速[1]。所以,駕駛員模塊可表示為負反饋結構,如圖3所示。汽車運行過程中反饋的速度信號,經BP模糊神經網絡控制策略處理后生成PWM的加速度控制信號,輸入到電機控制器可實現汽車加速或減速。
BP模糊神經網絡控制原理為:整車的車速偏差e和偏差變化率△e作為輸入量,通過模糊化作為神經網絡的輸入,神經網絡起模糊推理作用,通過自我學習,解模糊化輸出,調整PI控制器的參數Kp、Ki以達到最優[4],從而達到更有效的控制效果。
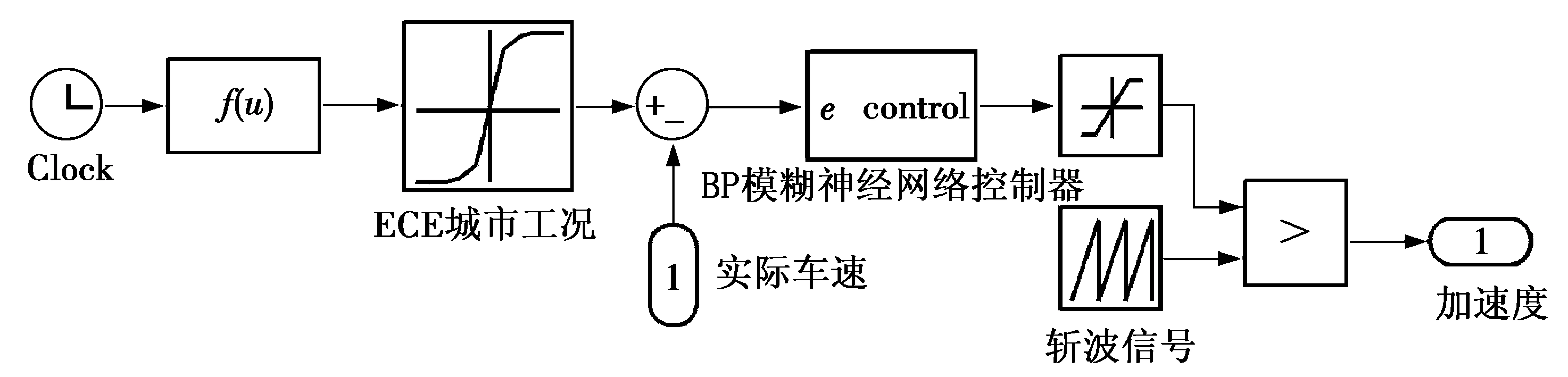
圖3 駕駛員模塊的負反饋結構
3車速跟隨仿真與試驗驗證
3.1仿真驗證
為了驗證本文提出的BP模糊神經網絡控制與傳統PI控制在車速跟隨中的控制效果,采用本文建立的整車模型對ECE城市工況[5]在MATLAB/Simulink環境下進行仿真驗證,實際車速對目標車速的跟隨結果如圖4和圖5所示。
從圖4和圖5可以看出:兩種策略控制的純電動汽車車速跟隨適應能力都很好,其中,BP模糊神經網絡控制的實際車速與目標車速偏差更小。
為進一步觀察兩種控制策略下,純電動汽車的實際車速與目標車速的偏差,對仿真過程的目標車速和實際車速作差,車速偏差如圖6和圖7所示。

圖6 基于BP模糊神經網絡控制的ECE城市工況目標車速與實際車速偏差圖7 基于傳統PI控制的ECE城市工況目標車速與實際車速偏差
從圖6和圖7可以看出:傳統PI控制的車速偏差大于±2 km/h,而BP模糊神經網絡控制的車速偏差在±2 km/h內,充分表明BP模糊神經網絡控制比PI控制的精度高。
3.2試驗驗證
分別采用BP模糊神經網絡控制和傳統PI控制在自主研發的整車慣性模擬試驗臺架上進行試驗,考察車輪轉速和待模擬的目標轉速跟隨情況。
在ECE城市工況下,BP模糊神經網絡控制和傳統PI控制的純電動汽車車速跟隨試驗結果如圖8和圖9所示。從圖8和圖9可以看出:在試驗情況下,兩種控制策略下的車速跟隨效果與仿真分析時有很大差距,因為仿真模型是把汽車各部件理想化,用數學模型替代,所以跟隨效果較好。而真實的試驗環境下,汽車各部件有不同的工作效率,所以偏差較大。BP模糊神經網絡的控制效果優于傳統PI控制,和仿真驗證結果一致。
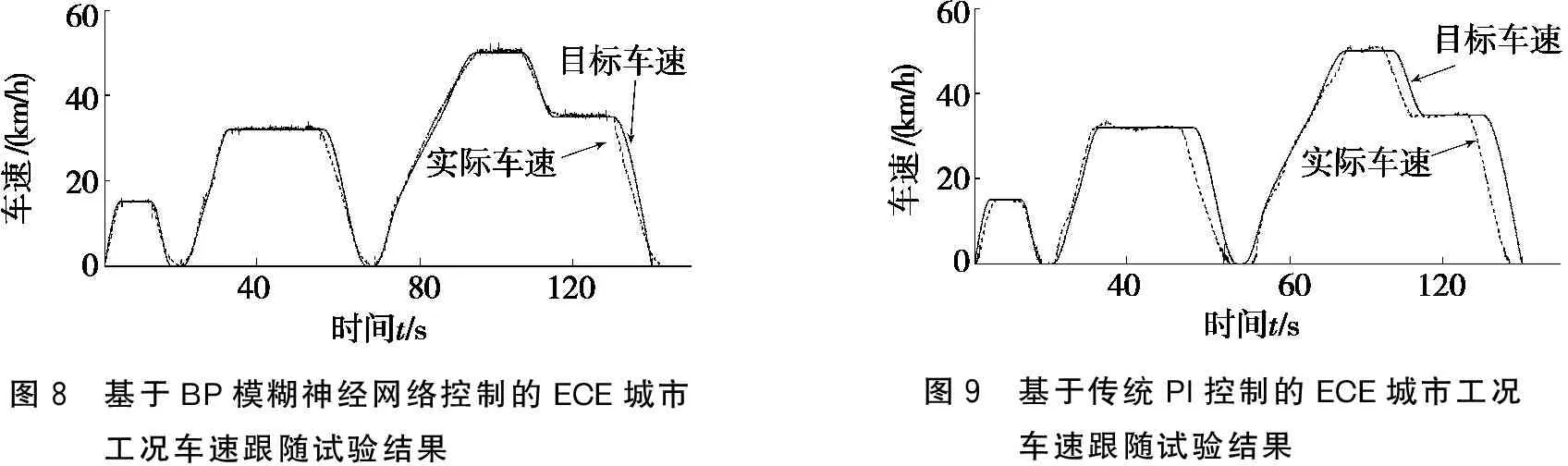
圖8 基于BP模糊神經網絡控制的ECE城市工況車速跟隨試驗結果圖9 基于傳統PI控制的ECE城市工況車速跟隨試驗結果
為進一步驗證控制結果,兩種控制策略下的純電動汽車車速跟隨偏差試驗結果如圖10和圖11所示。
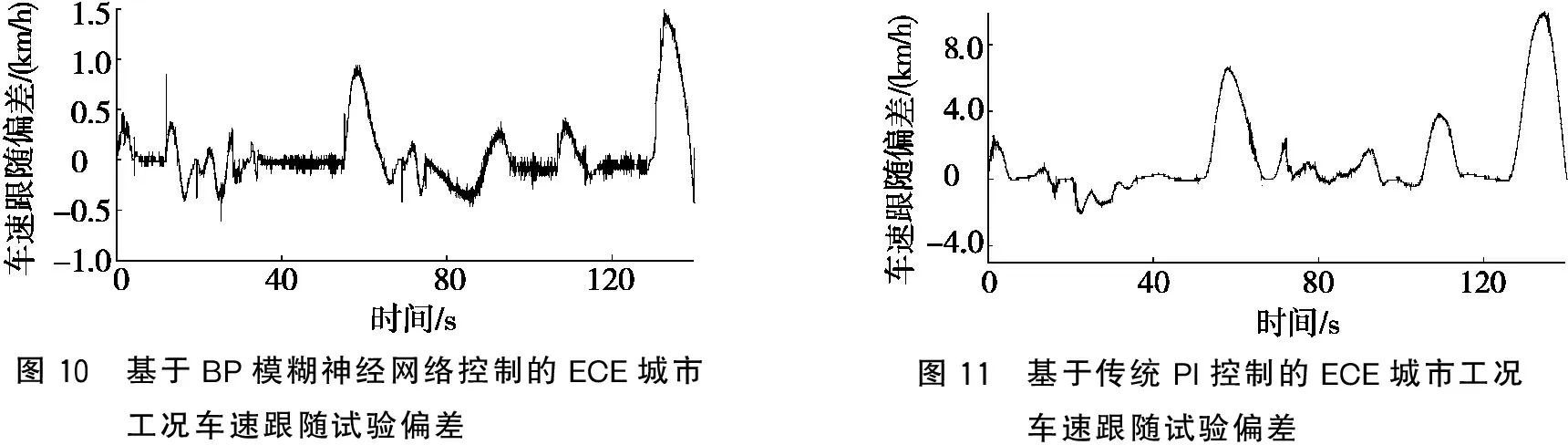
圖10 基于BP模糊神經網絡控制的ECE城市工況車速跟隨試驗偏差圖11 基于傳統PI控制的ECE城市工況車速跟隨試驗偏差
從圖10和圖11可以看出:傳統PI控制的車速偏差大,超過±5.0 km/h,而采用BP模糊神經網絡控制能將偏差控制在±2.0 km/h內,取得了對ECE城市工況跟隨控制的良好效果。尤其在勻速跟隨階段偏差低于±0.5 km/h,車速變化波動小,明顯提高了控制精度,且實時性強,完全能替代傳統的PI控制。
4結論
對純電動汽車的電機控制提出了BP模糊神經網絡控制策略。基于MATLAB/Simulink建立整車模型,進行仿真分析和試驗驗證。采用BP模糊神經網絡控制策略,純電動汽車電機控制良好,速度跟隨偏差較小,提高了整車的動力性、行駛穩定性及對目標工況的跟隨性,整車性能得到改善。在純電動汽車電機控制方面,BP模糊神經網絡控制策略優于傳統PI控制策略。
參考文獻:
[1]王悝.基于模糊控制的純電動汽車無刷直流電機驅動系統的研究[D].武漢:武漢理工大學,2011.
[2]侯春杰.基于遺傳算法的無刷直流電機自適應模糊控制[D].洛陽:河南科技大學,2013.
[3]李琳.基于RBF神經網絡無刷直流電機控制系統的基礎研究[D].淮南:安徽理工大學,2015.
[4]王莉娜,朱鴻悅,楊宗軍.永磁同步電動機調速系統PI控制器參數整定方法[J].電工技術學報,2014(5):104-117.
[5]SALEHPOUR S,POURASAD Y,TAHERI S H.Vehicle path tracking by integrated chassis control[J].Journal of central south university,2015,22:1378-1388.
[6]李娜,楊正林,周振超.純電動汽車前向仿真模型的研究[C]//中國汽車工程學會.2010中國汽車工程學會年會論文集.北京:機械工業出版社:2010:4.
[7]趙軒,馬建,汪貴平,等.基于模糊PI控制的純電動汽車驅動系統建模和仿真[J].科技導報,2010,15:83-87.
[8]馮超.基于Matlab/Simulink的電動汽車仿真模型設計與應用[D].北京:中國科學院大學,2013.
[9]楊超.電動汽車用永磁同步電動機驅動系統的模糊控制仿真[D].重慶:重慶大學,2004.
[10]余志生.汽車理論[M].北京:機械工業出版社,2007.
[11]劉峰,田韶鵬.電動汽車動力性能計算與仿真[J].北京汽車,2011(3):44-46.
[12]冀國威.電動汽車永磁無刷直流電機驅動控制系統研究[D].沈陽:東北大學,2013.
[13]付主木,高愛云.電動汽車用永磁同步電機模糊直接轉矩控制[J].河南科技大學學報(自然科學版),2015,36(5):19-24.
[14]唐偉.純電動汽車電機控制策略研究[D].成都:西華大學,2014.
基金項目:國家“863”計劃基金項目(2012AA111401);國家自然科學基金項目(51105178);江蘇省自然科學基金項目(BK2011489);江蘇省六大人才高峰基金項目(2013-XNY-002)
作者簡介:陳燎(1963-),男,四川德陽人,副教授,碩士,碩士生導師,主要從事汽車電子及智能交通系統方面的研究.
收稿日期:2016-01-14
文章編號:1672-6871(2016)04-0032-04
DOI:10.15926/j.cnki.issn1672-6871.2016.04.007
中圖分類號:U469.72
文獻標志碼:A
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36