基于稀疏拉伸式COLD傳感器的波達角和極化參數估計
2016-06-22 06:27:22趙繼超陶海紅高志奇
電波科學學報 2016年2期
關鍵詞:信號
趙繼超 陶海紅 高志奇
(西安電子科技大學 雷達信號處理國家重點實驗室,西安 710071)
?
基于稀疏拉伸式COLD傳感器的波達角和極化參數估計
趙繼超陶海紅高志奇
(西安電子科技大學 雷達信號處理國家重點實驗室,西安 710071)
摘要同點正交配置磁環和電偶極子(Co-centered Orthogonal Loop and Dipole, COLD)是常用的二分量電磁矢量傳感器之一,但是COLD傳感器沒有充分利用磁環和電偶極子分量的空間信息. 針對由COLD傳感器組成的均勻線陣,磁環分量保持不變,將電偶極子分量沿正交方向稀疏拉伸,形成L形陣,擴展陣列的空間孔徑,提出了基于廣義旋轉不變的降維多重信號分類算法. 該算法利用L形陣的幾何構形,將導向矢量分隔成三部分,利用廣義旋轉不變矩陣分別估計各個部分,使得波達角和極化參數僅需一維譜峰搜索就可以估計得到. 同時,在參考點處新增一個電偶極子天線,利用四元數模型解決了由于稀疏拉伸引起的相位周期模糊問題. 仿真實驗驗證了所提算法的有效性.
關鍵詞同點配置正交磁環-電偶極子;波達角;極化;基于廣義旋轉不變的降維多重信號分類算法
引言
由電磁矢量傳感器(Electromagnetic Vector Sensor, EMVS)組成的極化敏感陣列是一種新型陣列,與傳統標量陣列相比,不僅能夠利用陣元的空間分布獲取信號的空域信息,而且還可以獲取信號的極化狀態,使得極化敏感陣列在空間源定位上有更高的分辨能力和更強的抗干擾能力.
Paldi. N. E.基于麥克斯韋方程于1994年在文獻[1]中推導出復數模型下的極化敏感陣列的數學模型,奠定了極化敏感陣列信號處理的基礎. K.T.Wang、袁鑫等學者在文獻[2-5]闡述了如何利用單個六分量EMVS或者單個三分量EMVS去估計正弦信號的波達角(Direction of Arrival, DOA)和極化參數,但是單個EMVS的孔徑信息非常有限,參數估計精度較低,且這類算法只適用于正弦信號,算法實際應用很受限.
為了獲取更高的參數估計精度,由二分量EMVS組成的二維極化敏感陣列引起了國內外諸多學者的廣泛研究. 二維極化敏感陣列,由于其天線結構簡單,很容易將標量陣中的一些算法擴展到極化敏感陣列中. 如文獻[6]針對由同點正交配置磁環-電偶極子(Co-centered Orthogonal Loop and Dipole, COLD)組成的均勻線陣(Uniform Linear Array, ULA),將空間旋轉不變參數估計[7](Estimation of Signal Parameters via Rotational Invariance Techniques, ESPRIT) 算法拓展到了極化域,文獻[8]將多重信號分類方法[9](Multiple Signal Classification Method, MUSIC)應用到二維極化敏感陣列中.
極化敏感陣列中的算法不單單是標量陣列算法的擴展,由于極化敏感陣列自身的特性,也有一些只適用于極化敏感陣列的算法. 如文獻[10-11]針對循環平穩信號,研究了基于極化敏感陣列的空域/極化域的數據平滑解相干算法,與空間平滑相比,極化平滑對陣列排布沒有特殊要求,且不損失孔徑信息. 文獻[12]針對二維極化敏感陣列引入了四元數模型,提出了四元數MUSIC (Quaternion Multiple Signal Classification Method, Q-MUSIC)算法,但是算法需要四維譜峰搜索. 文獻[13]改進了Q-MUSIC算法,并提出了降維四元數ESPRIT(Dimension Reduction Quaternion Estimation of Signal Parameters via Rotational Invariance Techniques, DRQ-ESPRIT),該算法有效降低了算法復雜度,使得DOA和極化參數無需譜峰搜索就可以估計得到.
但是,這些算法均采用的是傳統二分量EMVS,傳感器分量是空間共點配置,沒有充分利用其空間信息. 為了充分利用各傳感器分量的空間信息,本文針對由COLD傳感器組成的ULA,保持磁環分量不變,將電偶極子分量沿正交方向均勻稀疏拉伸,形成L形陣,并提出了基于廣義旋轉不變的降維多重信號分類算法(Generalized Rotational Invariance Based Dimension Reduction Multiple Signal Classification Method, GRIDR-MUSIC). 所提算法利用L形陣的幾何構形,將導向矢量分隔成三部分,利用廣義旋轉不變矩陣僅需一維譜峰搜索就可以估計得到DOA和極化參數. 此外,在參考點新增一個電偶極子,利用四元數模型解決了由于稀疏拉伸引起的相位周期模糊問題.
本文結構如下:第一部分給出了基于拉伸式COLD傳感器的極化敏感陣列的數學模型,第二部分詳細講述了所提算法,第三部分給出了算法運算復雜度對比,第四部分用仿真實驗對算法性能進行說明,第五部分總結全文.
符號定義: (·)?,(·)-1,(·)H和(·)*分別表示廣義逆,矩陣求逆,共軛轉置和共軛運算; arg(·)表示取角度運算;E[·]表示數學期望. R表示有理數集,[·]r,[·]i,[·]j和[·]k分別表示取四元數的實部,第一虛部(i部),第二虛部(j部)和第三虛部(k部).
1數學模型
假設沿z軸分布的ULA由M個COLD傳感器組成,其中,磁環平行于x-y平面,電偶極子嚴格指向z軸,陣元間距d1為半波長,如圖1所示.
為了充分利用COLD傳感器中電偶極子和磁環分量的空間信息,本文保持沿z軸均勻分布的磁環不變,將電偶極子沿y軸均勻拉伸,為了彌補類空間平滑造成的陣列孔徑損失,電偶極子間的拉伸間距d2大于半波長. 陣元間距大于半波長會引起相位周期模糊問題,為此本文在參考點新增一個嚴格指向x軸的電偶極子,利用四元數模型來解相位周期模糊. 經過拉伸處理后的陣列如圖2所示.

圖1 COLD傳感器組成的ULA
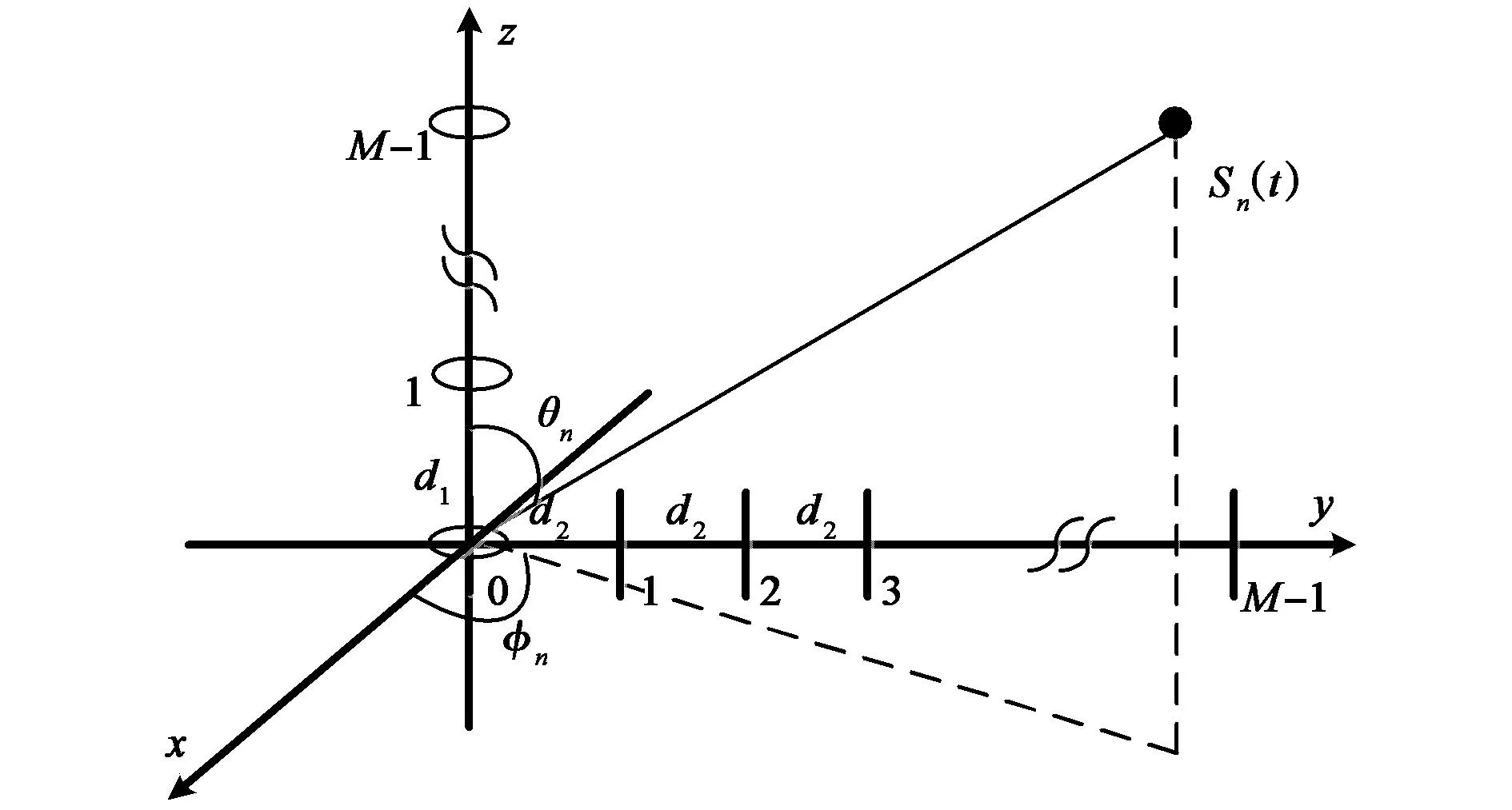
圖2 拉伸式COLD傳感器組成的L形陣
記由沿z軸分布,平行于x-y平面的磁環組成的ULA為子陣1,由沿y軸分布,嚴格指向z軸的電偶極子組成的ULA為子陣2. 假設有N個彼此獨立的遠場窄帶完全極化信號入射到該陣,則子陣1,子陣2和新增嚴格指向x軸的電偶極子的接收數據矩陣可以分別表示為:

z(t) =∑Nn=1qz(θn)hzn(θn,γn)sn(t)+nz(t)
=Az(θ,γ)s(t)+nz(t),

(1)
,φn)ezn(θn,γn,ηn)sn(t)+ny(t)
=Ay(θ,φ,γ,η)s(t)+ny(t),
(2)

(3)
式中: Az=[az(θ1,γ1),…,az(θN,γN)]為子陣1的陣列流形; az(θn,γn)=qz(θn)hzn(θn,γn)為第n個信號的導向矢量,n=1,2,…,N; qz(θn)=[1,e-j2πd1cosθn/λ,…,e-j2π(M-1)d1cosθn/λ]T表示陣元空間相移矢量;極化-角度域導向矢量hzn=sinθncosγn為沿z軸的磁場表達式,陣元間距d1=λ/2,λ是波長,φn∈[0,2π),θn∈[0,π],γn∈[0,π/2],ηn=[-π,π)分別是第n個信號的方位角、俯仰角、極化輔角和極化相位差. Ay=[ay(θ1,φ1,γ1,η1),…,ay(θN,φN,γN,ηN)]為子陣2的陣列流形,ay(θn,φn,γn,ηn)=qy(θn,φn)ezn(θn,γn,ηn)為第n個信號的導向矢量,qy(θn,φn)=[1,e-j2πd2sinθnsinφn/λ,…,e-j2π(M-1)d2sinθnsinφn/λ]T表示陣元空間相移矢量,陣元間距d2大于半波長,極化-角度域導向矢量ezn=-sinθnsinγnejηn為沿z軸的電場表達式. 極化-角度域導向矢量exn=cosφncosθnsinγnejηn-sinφncosγn為沿x軸的電場表達式. s(t)=[s1(t),…,sN(t)]T為信號矢量,nx(t),ny(t)和nz(t)均為加性高斯白噪聲,并假設矢量傳感器接收的每個噪聲分量彼此獨立且功率為σ2.
為了方便討論,令
αn=-2πd1cosθn/λ,
(4)
βn=-2πd2sinθnsinφn/λ.
(5)
則qz(θn)和qy(θn,φn)分別由qz(αn)和qy(βn)表示:
qz(αn)=[1,ejαn,ej2αn,…,ej(M-1)αn]T,
(6)
qy(βn)=[1,ejβn,ej2βn,…,ej(M-1)βn]T.
(7)
定義第n個信號的正交相位差Δn為
Δn=βn-αn.
(8)
本文需要做以下三點的假設: 1)αa-βa≠αb-βb+2πg,g為整數,a,b∈{1,2,…,N}; 2) 入射源個數已知; 3) 俯仰角不等于0和π,極化輔角不等于0和π/2.
2GRIDR-MUSIC算法
2.1傳統四維譜峰搜索的參數估計
拉伸式COLD傳感器組成的L形陣列的接收數據矩陣可以表示為

l(t) =z(t)y(t)é?êêù?úú=Az(θ,γ,η)Ay(θ,?,γ,η)é?êêù?úús(t)+nz(t)ny(t)é?êêù?úú
=A(θ,φ,γ,η)s(t)+n(t).
(9)
式中,A=[a(θ1,φ1,γ1,η1),…,a(θN,φN,γN,ηN)]為L形陣的陣列流形,第n個信號的導向矢量可以表示為
(10)
接收數據的協方差矩陣為:
Rll=E[l(t)lH(t)]=ARsAH+σ2I2M.
(11)
式中,Rs是信號矢量協方差矩陣,因為假設信號為彼此獨立的遠場窄帶完全極化信號,所以Rs為實對角矩陣,即Rs=diag{ps1,ps2,…,psN},對角線元素表征了入射信號的功率,I2M為2M維單位矩陣.
對Rll進行特征值分解,噪聲子空間Un為由2M-N個小特征值對應的特征向量組成的矩陣,信號子空間Us為由N個大特征值對應的特征向量組成的矩陣.
由傳統MUSIC算法可知,DOA和極化參數可以通過下式進行四維譜峰搜索估計得出:

(12)
四維譜峰搜索的運算量巨大,且由于d2大于半波長會引起相位周期模糊,使得式(12)估計得到的參數不唯一. 所以本文提出了GRIDR-MUSIC算法,所提算法利用L形陣的幾何構形,將導向矢量a(θ,φ,γ,η)分隔成三部分,并通過子陣1和子陣2的廣義旋轉不變性,僅需一維譜峰搜索就可以估計得到DOA和極化參數,有效地降低了運算量. 同時利用新增嚴格指向x軸的電偶極子的接收數據x(t),基于四元數模型解決了相位周期模糊問題.
2.2將導向矢量分隔為三部分
基于子空間理論可知信號子空間Us與陣列流形A張成的空間一樣,即
(13)
式中,T為N×N維滿秩矩陣. Az和Ay具有廣義旋轉不變的結構[14],可以表示為
Ay=[ay(θ1,φ1,γ1,η1),…,ay(θN,φN,γN,ηN)]
=[Ψ1az(θ1,γ1),…,ΨNaz(θN,γN)].
(14)
其中廣義旋轉不變矩陣Ψn可以表示為
Ψn(Δn,γn,ηn)=diag{-tanγnejηn,-tanγnejηnejΔn,
…,-tanγnejηnej(M-1)Δn}.
(15)
因此,導向矢量a(θ,φ,γ,η)可以重新表示為

a =az(θ,γ)ay(θ,?,γ,η)é?êêù?úú=IMΨ(Δ,γ,η)é?êêù?úúaz(θ,γ)
=Γ(Δ,γ,η)qz(α)hz(θ,γ).
(16)
記Γ(Δ,γ,η)為導向矢量的第一部分,qz(α)為導向矢量的第二部分,hz(θ,γ)為導向矢量的第三部分.
2.3估計導向矢量的第一部分
傳統廣義旋轉不變子空算法(Generalized Estimation of Signal Parameters via Rotational Invariance Techniques, G-ESPRIT)[14]指出,Ψ通過對下式函數進行三維譜峰搜索估計得到:
f(Δ,γ,η)=

(17)
但是,三維譜峰搜索的運算量仍然十分巨大,因此本文利用子陣1和子陣2互相關矩陣的對角線元素來對式(17)降維處理,以損失N個傳感器的孔徑自由度為代價,僅通過一維譜峰搜索就可以估計出Ψ中的Δ,γ和η.
2.3.1估計參數Δ
子陣1和子陣2接收數據的互相關矩陣可以表示為:
Rzy=E[y(t)zH(t)]=AyRsAz
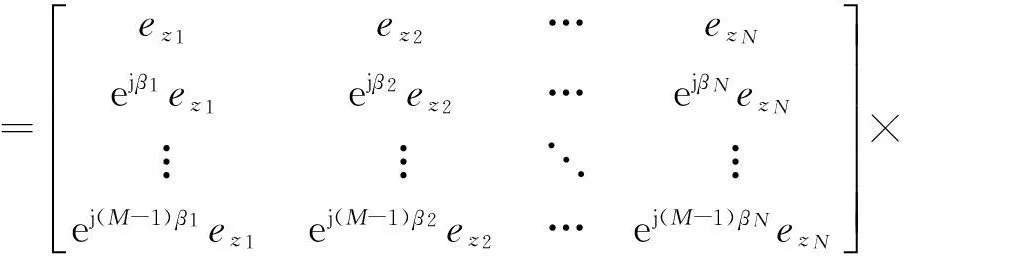
= ez1ez2…ezNejβ1ez1ejβ2ez2…ejβNezN????ej(M-1)β1ez1ej(M-1)β2ez2…ej(M-1)βNezNé?êêêêêêù?úúúúúú×
(18)
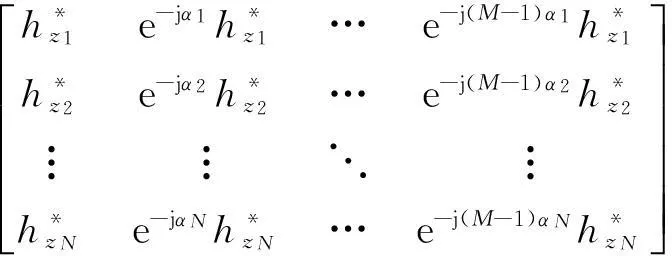
記rdiag為互相關矩陣Rzy對角線元素,rdiag可以表示成:
rdiag=
(19)
本文假設信源數已知,類似于參考文獻[15]的類空間平滑處理,構造(M-N+1)×N維矩陣Rdiag:
Rdiag=[r1,r2,…,rN].
(20)
式中,rn=rdiag(n∶M-N+n),n=1,2,…,N,rdiag(p:q)表示由rdiag的第p行到第q行組成的列矢量. Rdiag可以表示為三個矩陣相乘的形式:
Rdiag=UVW.
(21)
其中,
(22)
(23)
(24)
定義選擇矩陣J1=[IM-N,01],J2=[01,IM-N],其中,IM-N是(M-N)×(M-N)維單位矩陣,01是(M-N)×1的全零列向量,構造旋轉不變結構:
J2Rdiag=J2UVW=J1UΩVW
=J1Rdiag(VW)-1ΩVW.
(25)
式中,旋轉矩陣Ω為
Ω=diag{ejΔ1,ejΔ2,…,ejΔN}.
(26)
旋轉矩陣Ω可以通過特征值分解矩陣(J1Rdiag)?J2Rdiag得到的特征值進行估計,記為

(27)
2.3.2估計極化參數
(28)
(29)
基于式(21),矩陣V可以通過下式估計得出:
(30)
(31)


(32)
(33)
明顯看出,式(33)僅需N次一維譜峰搜索就可以估計出入射信號的極化輔角,與式(17)相比,有效地降低了運算量,不足之處就是在利用類空間平滑處理構造Rdiag時,損失了N個傳感器的孔徑自由度,本文將電偶極子沿y軸稀疏拉伸就是為了彌補孔徑自由度損失引起的參數估計精度降低. 但是本文算法依然存在可估計信源個數降低N個的不足.
2.4估計導向矢量的第二部分
利用MUSIC算法通過式(12)估計參數時,譜峰的形成僅僅取決于導向矢量的第一部分和第二部分,這是因為導向矢量的第三部分hz(θ,γ)=sinθncosγn不會影響導向矢量a和噪聲子空間Un的正交性,hz(θ,γ)類似于窗函數,只會影響譜峰的高低,所以導向矢量a可以簡化成:

(34)


(35)
(36)
基于式(8)可得:

(37)

2.5利用四元數模型解相位周期模糊
2.5.1四元數定義
四元數[16]是由Hamilton于1843提出的一種四維超復數,四元數h由一個實部和三個虛部組成:h=a+bi+cj+dk,其中a,b,c,d∈R,虛部i, j, k滿足:
i2=j2=k2=ijk=-1;
ij=-ji=k; ki=-ik=j;jk=-kj=i.
簡要介紹下本文用到的四元數基本運算,定義四元數h的共軛h*為h*=a-bi-cj-dk.

2.5.2解相位周期模糊
在圖2中參考點處,平行于x-y平面的磁環和新增嚴格指向z軸的電偶極子的接收數據可以用四元數聯合表示為:
x0(t)=
n0(t).
(38)
式中,四元數表示的極化-角度域導向矢量Ψn可以表示為:

Ψn= sinθncosγn+icos?ncosθnsinγncosηn-(

(39)

=MG.
(40)

(41)
所以可以得到G:
(42)
記G(n)為G的第n個元素,可以表示為:

G(n) =PsneznΨ*n

=Psn-sin2θnsinγncosγncosηn+(
jsin2θnsinγncosγnsinηn+
(43)
利用G(n)的第二虛部(j部)和第三虛部(k部),第n個信號的方位角可以粗估為:
(44)
(45)

2.6GRIDR-MUSIC算法流程
本文所提GRIGR-MUSIC算法僅需要一維譜峰搜索就可以估計入射信號的DOA和極化參數,且無需參數匹配,算法流程可以歸結如下:
1) 特征值分解L陣接收數據的協方差矩陣得到信號子空間Us和噪聲子空間Un;
2) 利用L陣的幾何構形,將導向矢量分隔成三部分,如式(16)所示;
3) 基于子陣1和子陣2的廣義旋轉不變結構,通過式(27)估計出導向矢量第一部分的正交相位差Δ,并利用式(32)和(33)估計極化相位差η和極化輔角γ;
5) 利用四元數模型,通過式(43)先粗估出方位角,然后基于最小二乘法,利用方位角的粗估值去解式(37)的相位周期模糊,從而精確地估計出方位角.
3計算量比較
兩個實數相加計1次加法,相乘計1次乘法,則兩個復數相加算2次加法,相乘算2次加法和4次乘法;復數和四元數相加算2次加法,相乘算4次加法和8次乘法;兩個四元數相加算4次加法,相乘算12次加法和16次乘法.此節將本文算法與文獻[8]的MUSIC算法和文獻[14]中的G-ESPRIT算法在運算量方面進行了對比,由于本文算法,MUSIC算法和G-ESPRIT算法的運算量主要集中在特征值分解,矩陣求逆和譜峰搜索,且乘法運算的資源耗費是加法的4~6倍,因此本文只分析上述三種運算的乘法運算量.

表1 三種算法的計算量
參數搜索范圍設定如下:方位角θ∈[0,π],俯仰角φ∈[0,2π),極化輔角γ∈[0,π/2],極化相位差η∈[-π,π),搜索步長均勻為1/L弧度,N和M分別代表信源數和COLD傳感器數,表1給出了三種算法的運算量.
由表1可以看出:傳統MUSIC算法需要搜索數次的數量級為L4,G-ESPRIT算法的搜索次數的數量級為L3,而本文所提算法的搜索次數的數量級降低為L,且每次搜索的運算量也低于MUSIC算法和G-ESPRIT算法,雖然在矩陣求逆和特征值分解操作中運算量稍微有所增加,但是遠小于譜峰搜索降低的運算量,所以本文算法在運算量方面明顯小于傳統的兩種算法.
4仿真實驗
在仿真實驗部分給出了一些仿真結果來說明所提算法的性能,并與文獻[6]所提的基于極化域ESPRIT算法和文獻[13]所提的DRQ-ESPRIT算法進行了對比. 假設COLD傳感器數目為6,入射信源數為2,信號的俯仰角、方位角、極化輔角和極化相位差分別為θ1=85°,φ1=76°,γ1=45°,η1=56°,θ2=62°,φ2=39°,γ2=27°,η2=33°,陣間距d1=λ/2,d2=2λ,蒙特卡洛實驗次數為100.
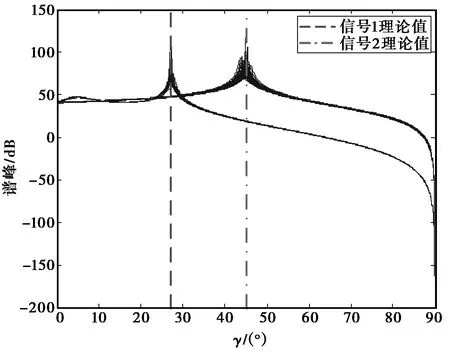
(a) 信噪比為5 dB,快拍數為200
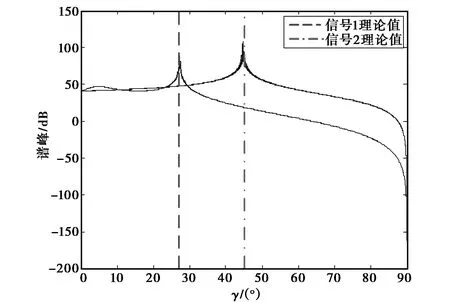
(b) 信噪比為20 dB,快拍數為200圖3 對極化輔角降維搜索譜峰的結果
圖3(a)和(b)分別為在5dB信噪比和20dB信噪比兩種條件下,極化輔角的譜峰搜索圖,搜索步長為0.1°.可以看出本文所提算法均在理論值處形成譜峰,且100次試驗譜峰位置與理論值均基本吻合,說明通過子陣1和子陣2互相關矩陣的對角線元素來估計導向矢量第一部分是正確有效的.

(a) 信噪比為5 dB,快拍數為200

(b) 信噪比為25 dB,快拍數為200圖4 對α降維譜峰搜索的結果
圖4(a)和(b)分別為在低信噪比和高信噪比兩種條件下,本文所提的GRIDR-MUSIC算法在估計α時的譜峰搜索圖,搜索步長為0.01rad,可以看到無論是在低信噪比條件下還是在高信噪比條件下,形成譜峰位置與理論值基本吻合,說明所提算法估計得到的導向矢量的第二部分是正確有效的.
由傳統的COLD傳感器組成的ULA,利用文獻[6]中的基于極化域ESPRIT算法,只能估計出入射信號的俯仰角,極化輔角和極化相位差,然而利用本文的基于拉伸式COLD傳感器的GRIDR-MUSIC算法,可以將入射信號的DOA和極化參數全部估計,圖5(a)和(b)為利用本文算法估計得到的方位角和俯仰角散布圖,直觀地可以看出通過本文算法估計得到的DOA參數抖動范圍很小,估計精度高.
圖6給出了利用本文算法和文獻[13]中的算法估計DOA和極化參數,標準誤差隨信噪比的變化曲線,快拍數設為200.本文算法和文獻[13]中的算法均需要經過類空間平滑處理,均損失了N個傳感器的自由度,但是由于將電偶極子沿正交方向稀疏拉伸,擴展了原來的極化敏感陣列的空間孔徑,從而使得估計精度比文獻[13]更高.

(a) 信噪比為5 dB,快拍數為200
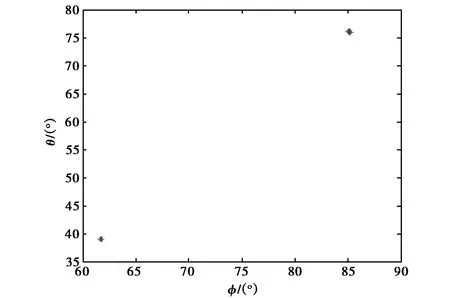
(b) 信噪比為25 dB,快拍數為200圖5 方位角和俯仰角估計散布圖
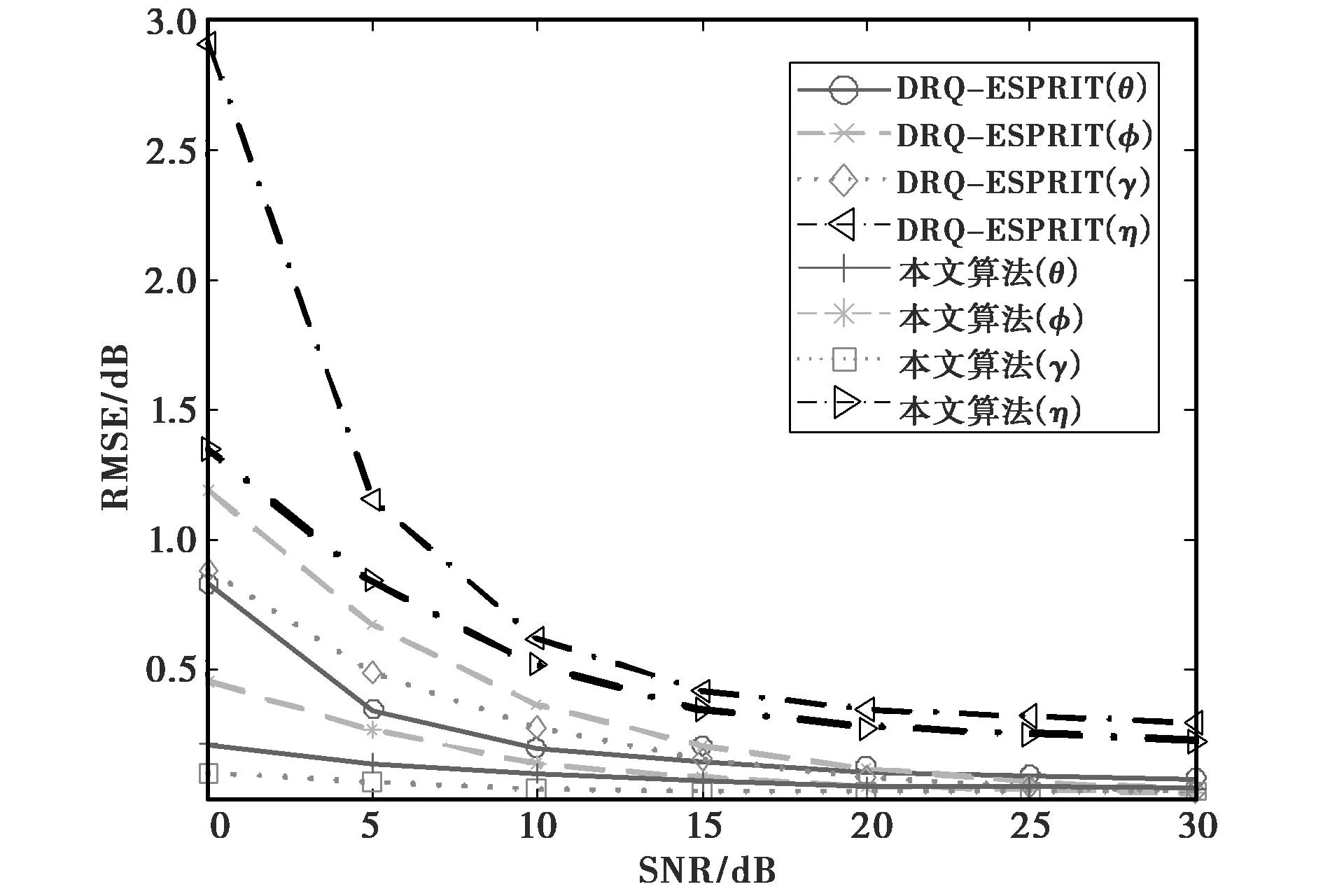
圖6 估計標準差隨信噪比的變化曲線
5結論
傳統COLD傳感器因為電偶極子和磁環是空間同點配置,沒有充分利用電偶極子和磁環分量的孔徑信息,本文針對由COLD傳感器組成的ULA,磁環分量保持不變,將電偶極子沿正交方向均勻稀疏拉伸,在沒有增加傳感器數量的基礎上,原ULA被拉伸成L形陣,擴展了陣列的孔徑信息,并基于拉伸后形成的L形陣,提出了GRIDR-MUSIC算法,所提算法將導向矢量分隔成三部分,并利用廣義旋轉不變矩陣分別估計各個部分,使得DOA和極化參數僅需一維譜峰搜索就可以估計得到,無需參數匹配. 最后,利用參考點新增電偶極子的接收數據構建四元數模型,解決了由于稀疏拉伸引起的相位周期模糊問題.
參考文獻
[1]PALDINE.Vector-sensorarrayprocessingforelectromagneticsourcelocalization[J].IEEEtransactionsonsignalprocessing, 1994, 42(2): 376-398.
[2]WONGKT,ZOLTOWSKIMD.Uni-vector-sensorESPRITformultisourceazimuth,elevation,andpolarizationestimation[J].IEEEtransactionsonantennasandpropagation, 1997, 45(10): 1467-1474.
[3]WONGKT,YUANX.Vectorcross-productdirection-findingwithanelectromagneticvector-sensorofsixorthogonallyorientedbutspatiallynoncollocatingdipoles/loops[J].IEEEtransactionsonsignalprocessing, 2011, 59(1): 160-171.
[4]YUANX,WONGKT,XUZX,etal.Variouscompositionstoformatriadofcollocateddipoles/loops,fordirectionfindingandpolarizationestimation[J].IEEEsensorsjournal, 2012, 12(6): 1763-1771.
[5]YUANX.EstimatingtheDOAandthepolarizationofapolynomial-phasesignalusingasinglepolarizedvector-sensor[J].IEEEtransactionsonsignalprocessing, 2012, 60(3): 1270-1282.
[6]LIJ,STOICAP,ZHENGDM.EfficientdirectionandpolarizationestimationwithaCOLDarray[J].IEEEtransactionsonantennasandpropagation, 1996, 44(4): 539-547.
[7]ROYR,KAILATHT.ESPRIT—estimationofsignalparametersviarotationalinvariancetechniques[J].IEEEtransactionsonacoustics,speech,andsignalprocessing, 1989, 37(7): 984-995.
[8]MIRONS,BIHANNL,MARSJI.Quaternion-MUSICforvector-sensorarrayprocessing[J].IEEEtransactionsonsignalprocessing, 2006, 54(4): 1218-1229.
[9]SCHMIDTRO.Multipleemitterlocationandsignalparameterestimation[J].IEEEtransactionsonantennasandpropagation, 1986, 34(3): 276-280.
[10]RAHAMIMD,SHAVITR,TABRIKIANJ.Coherentsourcelocalizationusingvectorsensorarrays[C]//ProceedingsoftheIEEEInternationalConferenceonAcoustics,Speech,andSignalProcessing,HongKong, 2003: 141-144.
[11]SHIHY,HUH,SHIYW.Novelsolutionofdirectionfindingandpolarizationestimationofmultipathcyclostationarysignals[C]//Proceedingsofthe2ndInternationalConferenceonInnovationComputing,Informationandcontrol.Kumamoto,Japan, 2007.
[12]MIRONS,LEBIHANN,MARSJI.Quaternion-MUSICforvector-sensorarrayprocessing[J].Transactionsonsignalprocessing, 2006, 54(4): 1218-1229.
[13]趙繼超, 陶海紅, 高志奇.基于降維四元旋轉不變子空間算法的波達角估計[J]. 電波科學學報, 2015, 30(3):483-490.
ZHAOJC,TAOHL,GAOZQ.DOAestimationusingdimensionreductionquaternionestimationofsignalparametersviarotationalinvariancetechniques[J].Chinesejournalofradioscience, 2015, 30(3): 483-490.(inChinese)
[14]GAOFF,GERSHMANAB.AgeneralizedESPRITapproachtodirectionofarrivalestimation[J].IEEEsignalprocessingletters, 2005, 12(3): 254-257.
[15]NIEX,LILP.Acomputationallyefficientsubspacealgorithmfor2-DDOAestimationwithL-shapedarray[J].IEEEsignalprocessingletters, 2014, 21(8): 971-974.
[16]HAMILTONWR.Onquaternions[J/OL].ProceedingoftheRoyalIrishAcademy, 1843, 3: 1-16. 1999[2015-06-17].http://www.emis.ams.org/classics/Hamilton/Quatern2.pdf.
Joint DOA and polarization parameters estimation based on sparsely stretched COLD sensors
ZHAO JichaoTAO HaihongGAO Zhiqi
(NationalLaboratoryofRadarSignalProcessing,XidianUniversity,Xi’an710071,China)
AbstractThe co-centered orthogonal loop and dipole (COLD) sensor is one of the most widely used two-component electromagnetic vector sensors. However, the COLD sensor does not make full use of the two component spatial aperture. The uniform linear array, which consists of COLD sensors, is considered. In order to extend the spatial aperture, all loop-components maintain the same, and all dipole-components are sparsely uniformly stretched along the orthogonal direction, thus an L-shaped array is formed. A generalized rotational invariance based dimension reduction multiple signal classification method (GRIDR-MUSIC) is proposed. The proposed algorithm uses the L-shaped array geometry to separate the steering vector into three parts, and uses the generalized rotational invariance matrix to estimate each part separately, thus direction of arrival (DOA) and polarization parameters can be estimated by only one-dimensional spectral peak search. In addition, a dipole is added in the conference point, and the quaternion model is used to resolve the phase cyclic ambiguity caused by sparsely stretching operation. Finally, the numerical simulations show the effectiveness of the proposed algorithm.
KeywordsCOLD sensor; DOA; polarization; GRIDR-MUSIC
收稿日期:2015-06-17
中圖分類號TN958.93
文獻標志碼A
文章編號1005-0388(2016)02-0269-09
DOI10.13443/j.cjors.2015061701
作者簡介
趙繼超(1989-),男,陜西人,博士研究生,研究方向為極化敏感陣列參數估計.
陶海紅(1976-),女,安徽人,西安電子科技大學電子工程學院教授,博士,博士生導師,研究方向為雷達信號處理與檢測、高速實時信號處理、陣列信號處理.
高志奇(1980-),男,內蒙古人,博士研究生,研究方向為陣列信號處理.
趙繼超, 陶海紅, 高志奇. 基于稀疏拉伸式COLD傳感器的波達角和極化參數估計[J]. 電波科學學報,2016,31(2):269-277. DOI: 10.13443/j.cjors.2015061701
ZHAO J C, TAO H H, GAO Z Q. Joint DOA and polarization parameters estimation based on sparsely stretched COLD sensors[J]. Chinese journal of radio science,2016,31(2):269-277. (in Chinese). DOI: 10.13443/j.cjors.2015061701
資助項目: 國家重點基礎研究發展計劃(973計劃)(2011CB707001); 國家自然科學基金(60971108); 西安電子科技大學基本科研業務費資助項目(BDY061428)
聯系人: 趙繼超 E-mail: 13891894124@139.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06