增程式電動(dòng)拖拉機(jī)及其旋耕機(jī)組仿真平臺(tái)開發(fā)
2016-06-23 08:32:01劉孟楠徐立友周志立劉衛(wèi)國
中國機(jī)械工程 2016年3期
劉孟楠 徐立友 周志立 劉衛(wèi)國
1.西安理工大學(xué),西安,710048 2.河南科技大學(xué),洛陽,4710033.國機(jī)重工建筑機(jī)械有限公司研究所,洛陽,471009
增程式電動(dòng)拖拉機(jī)及其旋耕機(jī)組仿真平臺(tái)開發(fā)
劉孟楠1徐立友2周志立2劉衛(wèi)國3
1.西安理工大學(xué),西安,7100482.河南科技大學(xué),洛陽,4710033.國機(jī)重工建筑機(jī)械有限公司研究所,洛陽,471009
摘要:針對電動(dòng)拖拉機(jī)研究領(lǐng)域常用仿真方法通用性較差、涉及機(jī)組作業(yè)的仿真平臺(tái)尚不完善等問題,以東方紅500(YTO-500)拖拉機(jī)為研究對象,設(shè)計(jì)了電動(dòng)拖拉機(jī)結(jié)構(gòu)方案和驅(qū)動(dòng)系統(tǒng)參數(shù),基于CRUISE建立了增程式電動(dòng)拖拉機(jī)仿真平臺(tái)。仿真分析了電動(dòng)拖拉機(jī)與傳統(tǒng)拖拉機(jī)的牽引性能,以及低速循環(huán)工況下拖拉機(jī)的地面特性和能耗情況,結(jié)果表明,建立的電動(dòng)拖拉機(jī)仿真模型能夠較好地模擬拖拉機(jī)行駛狀況。通過分析拖拉機(jī)動(dòng)力系、行走系與動(dòng)力輸出軸之間的轉(zhuǎn)矩耦合關(guān)系,提出了一種旋耕機(jī)組等效模型,建立了電動(dòng)拖拉機(jī)旋耕機(jī)組仿真平臺(tái),仿真結(jié)果表明,機(jī)組作業(yè)速度處于3.65 km/h附近,旋耕機(jī)主軸轉(zhuǎn)速保持在200 r/min,符合東方紅500拖拉機(jī)旋耕機(jī)組試驗(yàn)結(jié)果,車速提高了14%,燃油消耗下降了34.4%。
關(guān)鍵詞:電動(dòng)拖拉機(jī);旋耕機(jī)組;性能分析;仿真平臺(tái)
0引言
電動(dòng)拖拉機(jī)是農(nóng)業(yè)工程領(lǐng)域的研究熱點(diǎn)之一,其意義充分契合中國國家能源戰(zhàn)略相關(guān)科學(xué)、高效、綠色、低碳的特點(diǎn),滿足《全國農(nóng)業(yè)機(jī)械化科技發(fā)展“十二五”規(guī)劃》關(guān)于加快轉(zhuǎn)變農(nóng)業(yè)發(fā)展方式,發(fā)展增產(chǎn)增效型、資源節(jié)約型、環(huán)境友好型農(nóng)機(jī)化技術(shù)的要求[1-3]。AVL CRUISE、Advisor、CarSim、PSAT等整車性能仿真軟件廣泛應(yīng)用于乘用車、商務(wù)車等道路車輛的開發(fā)和性能分析中[4-9]。非道路車輛廣泛存在入土元件,相關(guān)仿真平臺(tái)多基于MATLAB/Simulink開發(fā),仿真平臺(tái)具有較好的適用性和靈活性,仿真效果良好[10-15],但存在建模過程繁瑣、后處理復(fù)雜及通用性較差等缺點(diǎn)。高輝松等[16-17]通過對Advisor頂層模塊進(jìn)行二次開發(fā),搭建了電動(dòng)拖拉機(jī)的仿真平臺(tái);孫強(qiáng)等[18]基于CRUISE/Simulink提出了履帶式推土機(jī)推土工況的仿真方法,均獲得了較好的仿真結(jié)果。
CRUISE主要針對道路車輛行駛工況進(jìn)行前向性仿真[19],CRUISE用于拖拉機(jī)的相關(guān)研究時(shí)需要結(jié)合整車及機(jī)組的結(jié)構(gòu)特點(diǎn)和相關(guān)參數(shù)搭建整車模型和農(nóng)機(jī)具模型,并在框架內(nèi)實(shí)現(xiàn)動(dòng)力耦合關(guān)系,仿真時(shí)需要確保機(jī)組動(dòng)力系統(tǒng)、行駛系統(tǒng)和耕作系統(tǒng)間的輸出特性關(guān)系符合相關(guān)實(shí)際要求[20-21],有效體現(xiàn)驅(qū)動(dòng)輪滑轉(zhuǎn)率、蓄電池荷電狀態(tài)(SOC)、動(dòng)力輸出軸(power take off,PTO)轉(zhuǎn)速、轉(zhuǎn)矩等描述機(jī)組工作狀態(tài)的變量跟隨行駛工況及入土部件負(fù)載轉(zhuǎn)矩變化的情況。鑒于此,本文基于CRUISE,針對旋耕工況開發(fā)增程式電動(dòng)拖拉機(jī)及其機(jī)組的仿真平臺(tái)。
1電動(dòng)拖拉機(jī)仿真建模
1.1結(jié)構(gòu)設(shè)計(jì)
農(nóng)業(yè)拖拉機(jī)作業(yè)過程具有較高負(fù)荷率及較長周期,設(shè)計(jì)電驅(qū)動(dòng)系統(tǒng)需要保證拖拉機(jī)具有充足的續(xù)航能力。本文采用增程式能源系統(tǒng)針對東方紅500(YTO-500)輪式拖拉機(jī)設(shè)計(jì)電驅(qū)動(dòng)系統(tǒng),其結(jié)構(gòu)如圖1所示,主要組件包括柴油機(jī)、發(fā)電機(jī)、蓄電池組、電機(jī)控制器、牽引電動(dòng)機(jī)、變速箱、中央傳動(dòng)、動(dòng)力輸出軸等。其中蓄電池組作為主能源,高速柴油機(jī)/發(fā)電機(jī)組作為輔助能源。當(dāng)蓄電池SOC值Ssoc較低時(shí),通過控制系統(tǒng)可實(shí)現(xiàn)二者之間的電功率單向供給,這樣可提高電動(dòng)拖拉機(jī)的續(xù)航能力。
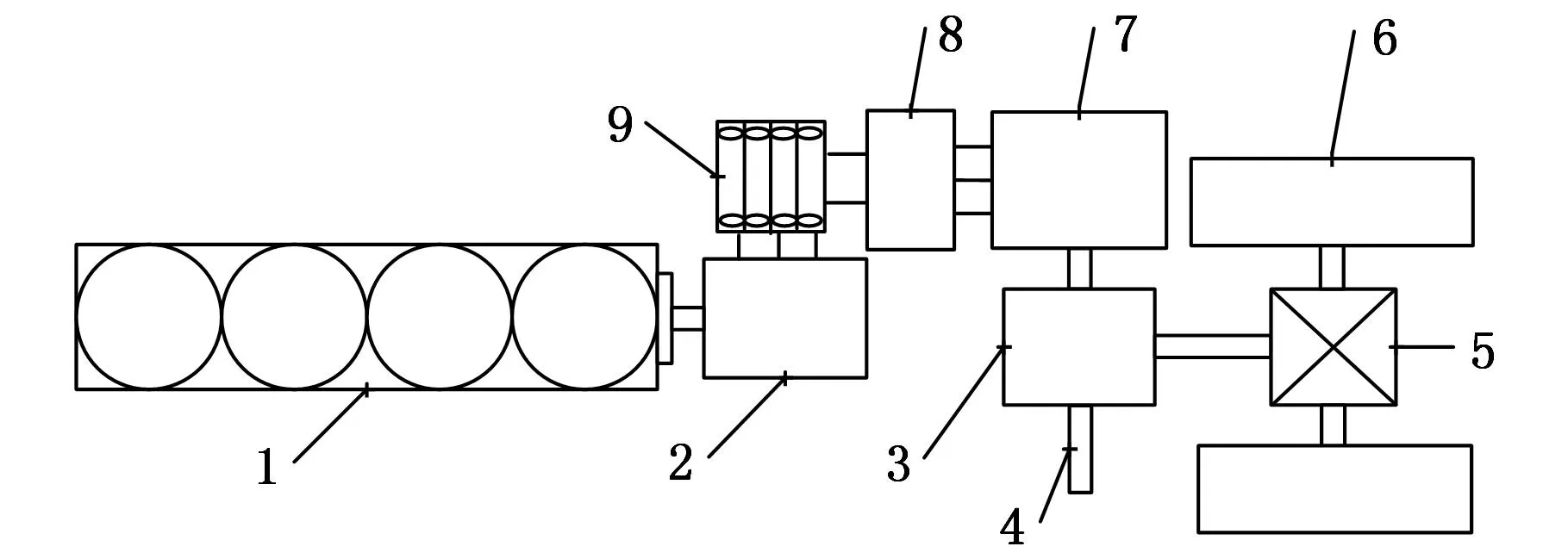
1.柴油機(jī) 2.發(fā)電機(jī) 3.變速器 4.動(dòng)力輸出軸 5.中央傳動(dòng)6.驅(qū)動(dòng)輪 7.牽引電動(dòng)機(jī) 8.電機(jī)控制器 9.蓄電池組圖1 增程式電動(dòng)拖拉機(jī)結(jié)構(gòu)
1.2參數(shù)匹配
為保證電動(dòng)拖拉機(jī)動(dòng)力系統(tǒng)外特性能夠滿足YTO-500的常遇工況要求,設(shè)計(jì)牽引電動(dòng)機(jī)應(yīng)保證其額定功率不小于該型號拖拉機(jī)配套柴油機(jī)YT4A1-T1的額定功率,額定轉(zhuǎn)矩應(yīng)滿足配套犁耕工況下負(fù)載牽引力需求,即

(1)
(2)
式中,Prated、nrated、Trated分別為電動(dòng)拖拉機(jī)牽引電動(dòng)機(jī)額定功率、轉(zhuǎn)速、轉(zhuǎn)矩;wp為耕幅;hp為耕深;k為土壤比阻;it0為拖拉機(jī)變速器傳動(dòng)比;itg為拖拉機(jī)中央傳動(dòng)比;ηtm為拖拉機(jī)傳動(dòng)系機(jī)械效率。
以比阻值k為0.8~10 N/cm2的北方未耕黏土地作為犁耕工況試驗(yàn)土地,拖拉機(jī)配套農(nóng)機(jī)具(耕地機(jī)械)參數(shù)如表1所示。
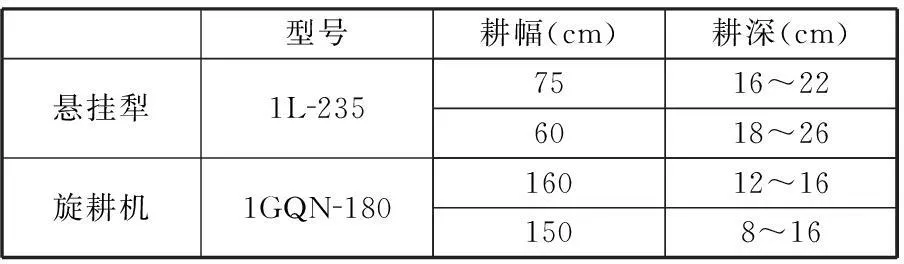
表1 YTO-500拖拉機(jī)配套耕地機(jī)械主要參數(shù)
蓄電池能量容量應(yīng)能夠在設(shè)定工況范圍內(nèi)滿足牽引電動(dòng)機(jī)的功率需求:
(3)
(4)
Eb≥EmPm(t)≤Prated
式中,Eb為蓄電池的能量容量;nb為蓄電池個(gè)數(shù);Vb為蓄電池組端電壓;Ib為蓄電池組端電流;Em為牽引電動(dòng)機(jī)的能量需求;Pm為牽引電動(dòng)機(jī)的機(jī)械功率輸出;ηtm為牽引電動(dòng)機(jī)能量轉(zhuǎn)換效率。
拖拉機(jī)底盤輪胎及車架參數(shù)保留YTO-500相關(guān)結(jié)構(gòu)參數(shù),設(shè)計(jì)整車主要參數(shù)如表2所示。

表2 增程式電動(dòng)拖拉機(jī)主要參數(shù)
1.3增程式電動(dòng)拖拉機(jī)仿真平臺(tái)
基于CRUISE搭建增程式電動(dòng)拖拉機(jī)及傳統(tǒng)拖拉機(jī)仿真平臺(tái),如圖2所示。圖2a中,柴油機(jī)和發(fā)電機(jī)啟動(dòng)信號及負(fù)載信號通過Energy systems control模塊進(jìn)行控制。相關(guān)控制策略基于蓄電池組SOC值平衡制定,設(shè)定相應(yīng)閾值為45%~70%。當(dāng)蓄電池組SOC值低于閾值下限時(shí),柴油機(jī)和發(fā)電機(jī)的啟動(dòng)信號為1,柴油機(jī)通過基于轉(zhuǎn)速的邏輯門策略控制,發(fā)電機(jī)高效運(yùn)行對蓄電池充電。當(dāng)蓄電池組SOC值高于閾值上限時(shí),增程系統(tǒng)啟動(dòng)信號為0,蓄電池停止充電。牽引電動(dòng)機(jī)的啟動(dòng)情況由駕駛員模塊的啟動(dòng)信號控制,輸出特性情況由加速踏板信號控制。換擋過程由Gear control模塊控制,在保證牽引電動(dòng)機(jī)高效運(yùn)行的基礎(chǔ)上制定換擋策略,并由轉(zhuǎn)速控制實(shí)現(xiàn)。仿真過程中差速器模塊差速解鎖,附著率和滑轉(zhuǎn)率等車輛-地面參數(shù)根據(jù)YTO-500拖拉機(jī)相關(guān)試驗(yàn)結(jié)果賦值。
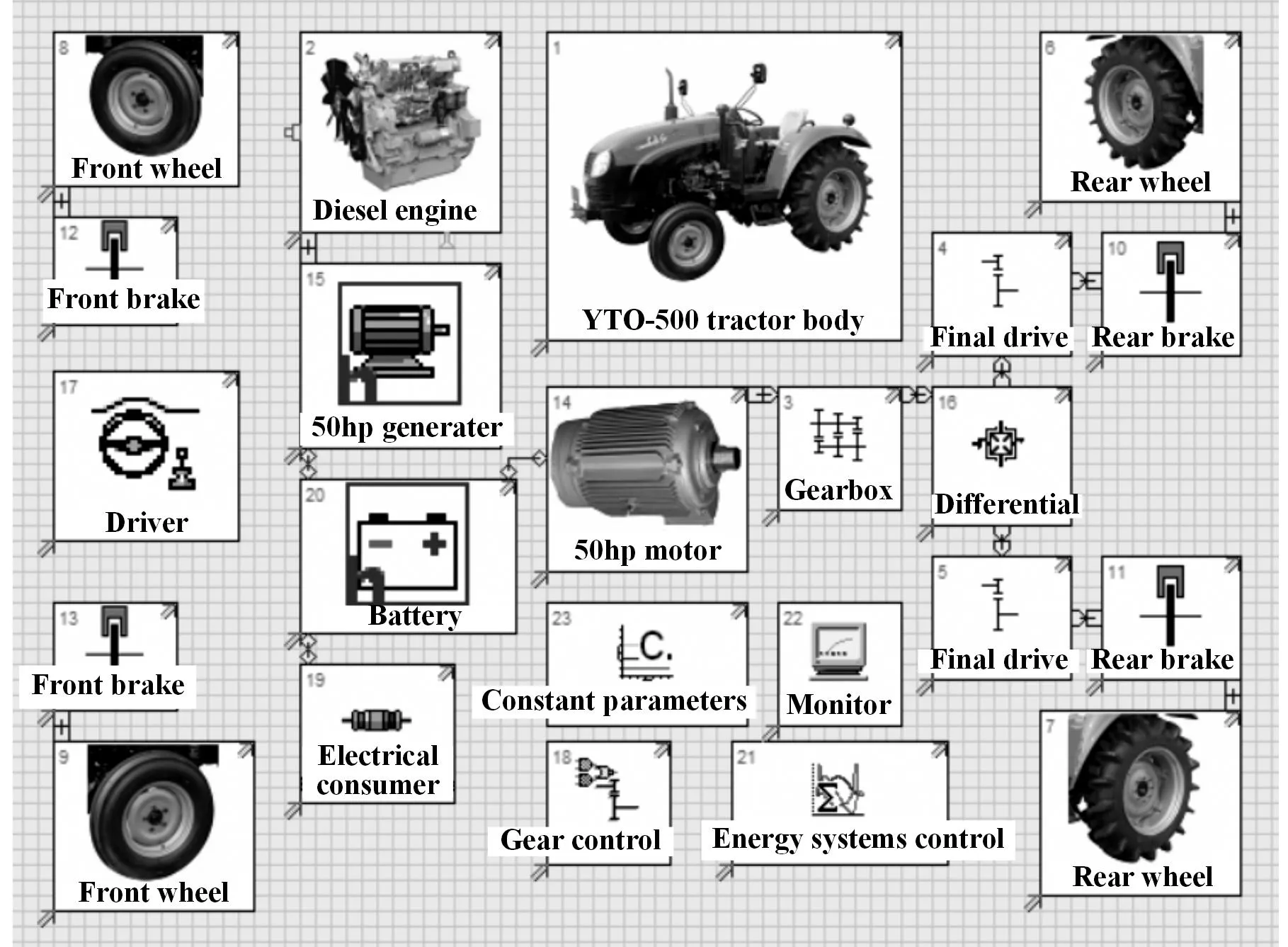
(a)增程式電動(dòng)拖拉機(jī)仿真模型
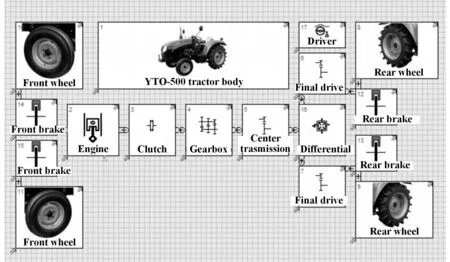
(b)傳統(tǒng)拖拉機(jī)仿真模型圖2 拖拉機(jī)整車仿真平臺(tái)
1.4模型驗(yàn)證
基于圖2搭建的仿真平臺(tái),在Project Data下通過Task Folder模塊設(shè)定運(yùn)算步長、準(zhǔn)靜態(tài)計(jì)算模式的時(shí)間間隔、速度間隔等外部參數(shù);通過Maximum Traction Force模塊根據(jù)牽引試驗(yàn)臺(tái)附近環(huán)境采樣數(shù)據(jù),設(shè)定環(huán)境溫度為20 ℃、相對濕度為65%、風(fēng)速為5 km/h、空氣密度為1.19 kg/m3;基于最優(yōu)燃油消耗率設(shè)定換擋策略,進(jìn)行牽引性能仿真實(shí)驗(yàn),并與YTO-500拖拉機(jī)相關(guān)試驗(yàn)結(jié)果進(jìn)行對比,如圖3、圖4所示。
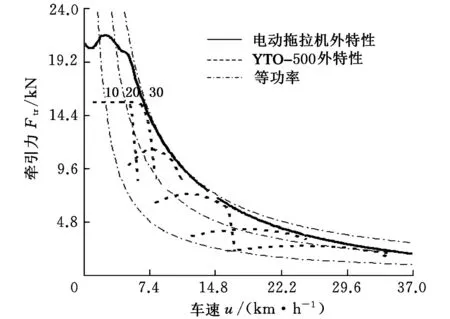
圖3 電動(dòng)拖拉機(jī)外特性仿真結(jié)果
圖3所示為拖拉機(jī)外特性仿真結(jié)果,圖中,等功率線上的數(shù)值單位為kW。仿真Ⅰ擋運(yùn)行狀態(tài)時(shí),當(dāng)牽引電機(jī)轉(zhuǎn)速超過基速后外特性曲線與30 kW等功率曲線基本重合,符合電機(jī)驅(qū)動(dòng)調(diào)速特點(diǎn);仿真Ⅱ擋運(yùn)行狀態(tài)時(shí),當(dāng)車速超過15 km/h時(shí),其外特性曲線被30 kW等功率曲線包絡(luò),其原因是拖拉機(jī)迎風(fēng)面積大且風(fēng)阻系數(shù)大。
圖4所示為拖拉機(jī)牽引功率仿真結(jié)果,圖中,牽引力曲線上的數(shù)值單位為kN。由圖4可知,車速范圍為5~12 km/h時(shí)拖拉機(jī)具有較高的牽引效率,其原因是,低速重載工況時(shí)驅(qū)動(dòng)輪滑轉(zhuǎn)嚴(yán)重,造成一定的功率損失。
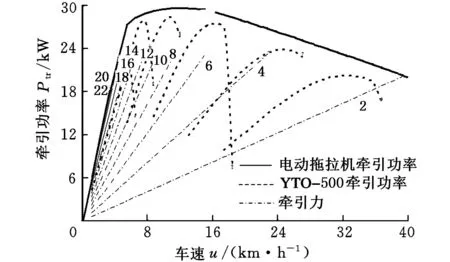
圖4 電動(dòng)拖拉機(jī)牽引功率仿真結(jié)果
采用2擋變速器的電動(dòng)拖拉機(jī)的調(diào)速特性曲線及牽引功率特性曲線完全覆蓋采用8擋變速器的傳統(tǒng)拖拉機(jī)的相應(yīng)曲線,動(dòng)力性較好,牽引效率較高;在一定速度范圍內(nèi),電動(dòng)拖拉機(jī)可實(shí)現(xiàn)無級變速;由于牽引電動(dòng)機(jī)具有接近理想情況的輸出特性場,其變速器機(jī)械結(jié)構(gòu)相對YTO-500拖拉機(jī)原有6F+2R式變速器機(jī)械結(jié)構(gòu)來說簡化了75%;仿真結(jié)果符合前期相關(guān)研究[22]結(jié)論。
基于UDC-CVT(United States drive cycle-continuously variable transmission)工況,設(shè)定仿真工況下車速為原工況的0.5倍,蓄電池初始SOC值為60%,執(zhí)行5次工況循環(huán)。柴油機(jī)燃油消耗、蓄電池組SOC值及電能消耗情況如圖5所示。由圖5可見,運(yùn)行326.2 s后,蓄電池組SOC值低于閾值下限,柴油機(jī)啟動(dòng),燃油消耗率達(dá)到5.33 L/h,充電過程中蓄電池做負(fù)功,電能消耗開始下降;運(yùn)行570.3 s后,經(jīng)過充電的蓄電池組SOC值高于閾值上限,此時(shí)累計(jì)消耗燃油0.36 L,柴油機(jī)/發(fā)電機(jī)組關(guān)閉,電能消耗開始增加,蓄電池組SOC值開始下降;此工況下傳統(tǒng)拖拉機(jī)平均燃油消耗率為5.31L/h,電動(dòng)拖拉機(jī)平均燃油消耗率為1.85 L/h。
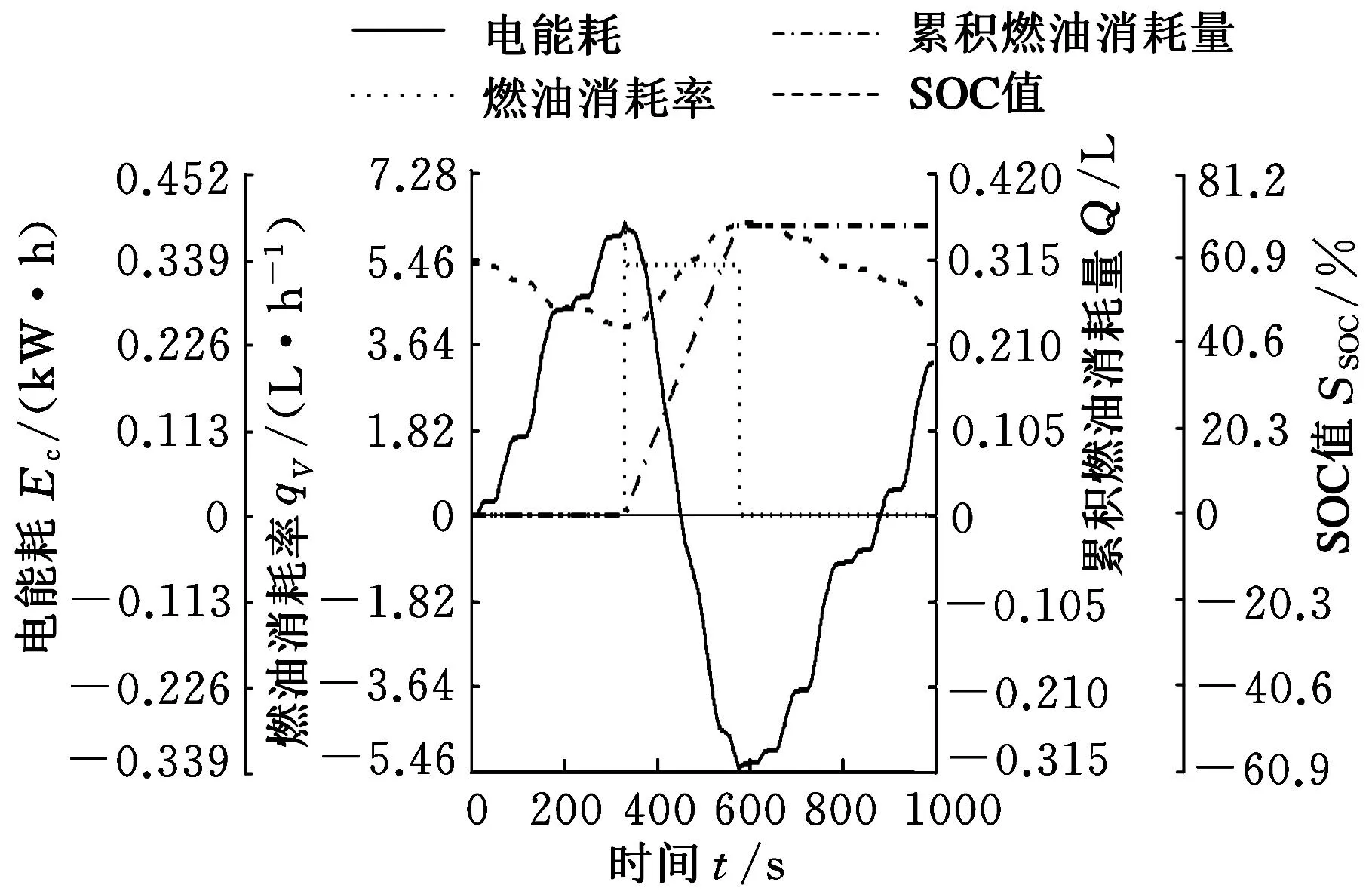
圖5 仿真過程耗能情況
行駛距離、車速及驅(qū)動(dòng)輪滑轉(zhuǎn)情況如圖6所示。牽引電動(dòng)機(jī)轉(zhuǎn)速超過基速后,其端電壓不變,磁通衰減,具有恒功率機(jī)械特性,拖拉機(jī)牽引力與車速成近似反比關(guān)系。由圖6可見,驅(qū)動(dòng)輪滑轉(zhuǎn)率隨車速增大而減小,對牽引力變化具有較好的跟隨性。
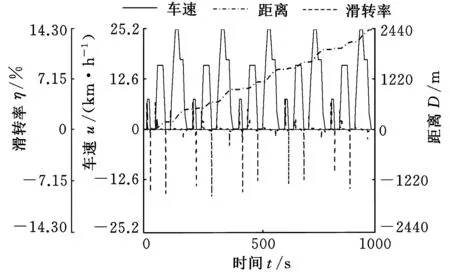
圖6 仿真過程動(dòng)力學(xué)情況
根據(jù)以上分析,所建立的增程式電動(dòng)拖拉機(jī)仿真模型能夠較好地模擬拖拉機(jī)行駛狀況,可用于搭建機(jī)組仿真平臺(tái)。
2旋耕機(jī)組仿真模型
2.1旋耕機(jī)組動(dòng)力學(xué)模型
電動(dòng)拖拉機(jī)牽引旋耕機(jī)組作業(yè)時(shí)機(jī)組功率平衡關(guān)系為
Pm=Pdrive+Pr
(5)
式中,Pdrive為拖拉機(jī)行駛功率;Pr為旋耕機(jī)功率消耗;v為機(jī)組行進(jìn)速度;m為拖拉機(jī)使用質(zhì)量;f為滾動(dòng)阻力系數(shù);α為坡度角;CD為拖拉機(jī)風(fēng)阻系數(shù);A為拖拉機(jī)迎風(fēng)面積;δ為拖拉機(jī)質(zhì)量換算系數(shù);Pc為切土功率消耗;Pth為拋土功率消耗;Pa為旋耕機(jī)前進(jìn)功率消耗;Pre為克服土壤水平反力的功率消耗;ηrm為旋耕機(jī)機(jī)械傳動(dòng)效率。
切土功率Pc和拋土功率Pth可占旋耕機(jī)全部消耗功率的70%以上,正轉(zhuǎn)旋耕機(jī)刀片部分的功率可部分或全部取代前進(jìn)功率Pa。若Pre≥Pa,則由二者共同驅(qū)動(dòng)旋耕機(jī)前進(jìn),否則將產(chǎn)生寄生功率,造成機(jī)械損失,加重傳動(dòng)系統(tǒng)的負(fù)荷。YTO-500裝配雙作用離合器,可實(shí)現(xiàn)PTO動(dòng)力的獨(dú)立控制,旋耕作業(yè)時(shí)機(jī)組存在如下關(guān)系:
(6)
v=vr
式中,PPTO為動(dòng)力輸出軸功率消耗;nPTO為動(dòng)力輸出軸轉(zhuǎn)速;TPTO為動(dòng)力輸出軸轉(zhuǎn)矩;vr為旋耕機(jī)前進(jìn)速度。
電動(dòng)拖拉機(jī)驅(qū)動(dòng)系統(tǒng)應(yīng)保證牽引電動(dòng)機(jī)輸出轉(zhuǎn)速nm同旋耕機(jī)刀軸轉(zhuǎn)速nr與驅(qū)動(dòng)橋半軸轉(zhuǎn)速ndrive三者之間存在如下關(guān)系:
nm∝nr∝ndrive
(7)
根據(jù)式(5)和式(7),旋耕機(jī)刀片同車輪之間存在轉(zhuǎn)矩耦合的關(guān)系,即
(8)
式中,Tm為牽引電動(dòng)機(jī)輸出轉(zhuǎn)矩;Tdrive為驅(qū)動(dòng)橋半軸轉(zhuǎn)矩;Tr為旋耕機(jī)刀軸轉(zhuǎn)矩;itn為第n擋傳動(dòng)比;ir為動(dòng)力輸出軸與牽引電動(dòng)機(jī)之間的傳動(dòng)比。
2.2旋耕機(jī)組耦合關(guān)系分析
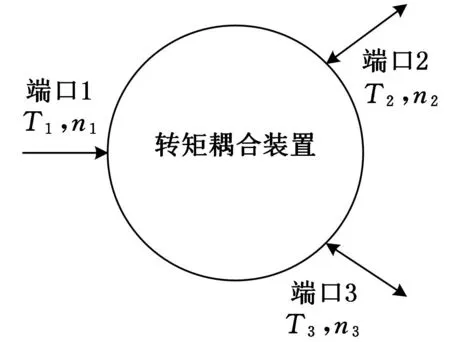
圖7 轉(zhuǎn)矩耦合示意圖
基于上述分析,建立機(jī)組仿真模型的關(guān)鍵是實(shí)現(xiàn)車輪與旋耕機(jī)刀片之間的轉(zhuǎn)矩耦合關(guān)系。機(jī)械轉(zhuǎn)矩耦合原理如圖7所示,端口1單向輸入,端口2和端口3雙向輸出。三者機(jī)械特性之間存在如下關(guān)系:
T1n1=T2n2+T3n3
(9)
(10)
n1=i1-2n2=i1-3n3
(11)
式中,T1、T2、T3分別為端口1、端口2、端口3處轉(zhuǎn)矩;n1、n2、n3分別為端口1、端口2、端口3處轉(zhuǎn)速;i1-2為端口1和端口2之間的速比;i1-3為端口1和端口3之間的速比。
圖8a為拖拉機(jī)牽引旋耕機(jī)組作業(yè)模型簡圖,其中牽引電動(dòng)機(jī)對應(yīng)圖7端口1,驅(qū)動(dòng)輪對應(yīng)端口2,旋耕機(jī)刀片由PTO驅(qū)動(dòng),對應(yīng)端口3。圖8b所示為等效模型,其中牽引電動(dòng)機(jī)對應(yīng)端口1,端口3旋耕機(jī)等效為單軸牽引車,與端口2驅(qū)動(dòng)輪之間通過牽引關(guān)系實(shí)現(xiàn)轉(zhuǎn)矩耦合,三者機(jī)械特性之間關(guān)系為
(12)
(13)
(14)

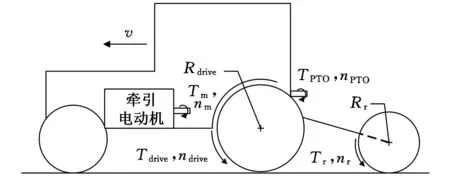
(a)旋耕機(jī)組耦合模型
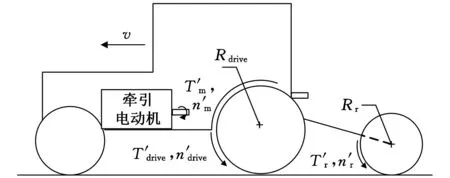
(b)旋耕機(jī)組耦合等效模型圖8 機(jī)組轉(zhuǎn)矩耦合等效模型簡圖
對比式(9)~式(11)與式(12)~式(14)可知,圖8b所示等效模型可以體現(xiàn)機(jī)組牽引電動(dòng)機(jī)、驅(qū)動(dòng)輪、旋耕機(jī)之間的轉(zhuǎn)矩耦合關(guān)系,基于此建立仿真模型可以避免構(gòu)建復(fù)雜的轉(zhuǎn)矩耦合機(jī)構(gòu)。
2.3旋耕機(jī)組仿真平臺(tái)
通過CRUISE中的Trailer模塊、Wheel模塊及Flange模塊,構(gòu)建旋耕機(jī)仿真模型。選擇表1中型號為1GQN-180的旋耕機(jī)匹配圖2a所示的增程式電動(dòng)拖拉機(jī)仿真模型,搭建增程式電動(dòng)拖拉機(jī)旋耕機(jī)組仿真平臺(tái)如圖9所示。

圖9 增程式電動(dòng)拖拉機(jī)旋耕機(jī)組CRUISE模型
圖9中旋耕機(jī)的前進(jìn)功率損耗通過模擬車輪的行駛阻力功率實(shí)現(xiàn);刀片切土、拋土及其他功率損耗由模型中與車輪剛性機(jī)械連接的Flange模塊通過加載轉(zhuǎn)矩特性模塊模擬。通過Map模塊設(shè)定符合正態(tài)分布的土壤阻力采樣參數(shù)來模擬耕作阻力變化情況。
2.4仿真分析
仿真工況:設(shè)置電動(dòng)拖拉機(jī)變速器擋位為Ⅰ擋,蓄電池組初始SOC值為50%。
仿真結(jié)果如圖10~圖12所示。由圖10可知,拖拉機(jī)牽引電動(dòng)機(jī)、車輪及旋耕機(jī)刀片三者轉(zhuǎn)矩變化趨勢相同;考慮三者之間傳動(dòng)比的關(guān)系,忽略機(jī)械傳動(dòng)損失,牽引電動(dòng)機(jī)輸出轉(zhuǎn)矩?cái)?shù)值上等于驅(qū)動(dòng)輪輸入轉(zhuǎn)矩與所有刀片輸入轉(zhuǎn)矩之和,符合轉(zhuǎn)矩耦合特征。仿真模型可有效模擬拖拉機(jī)旋耕機(jī)組作業(yè)工況。
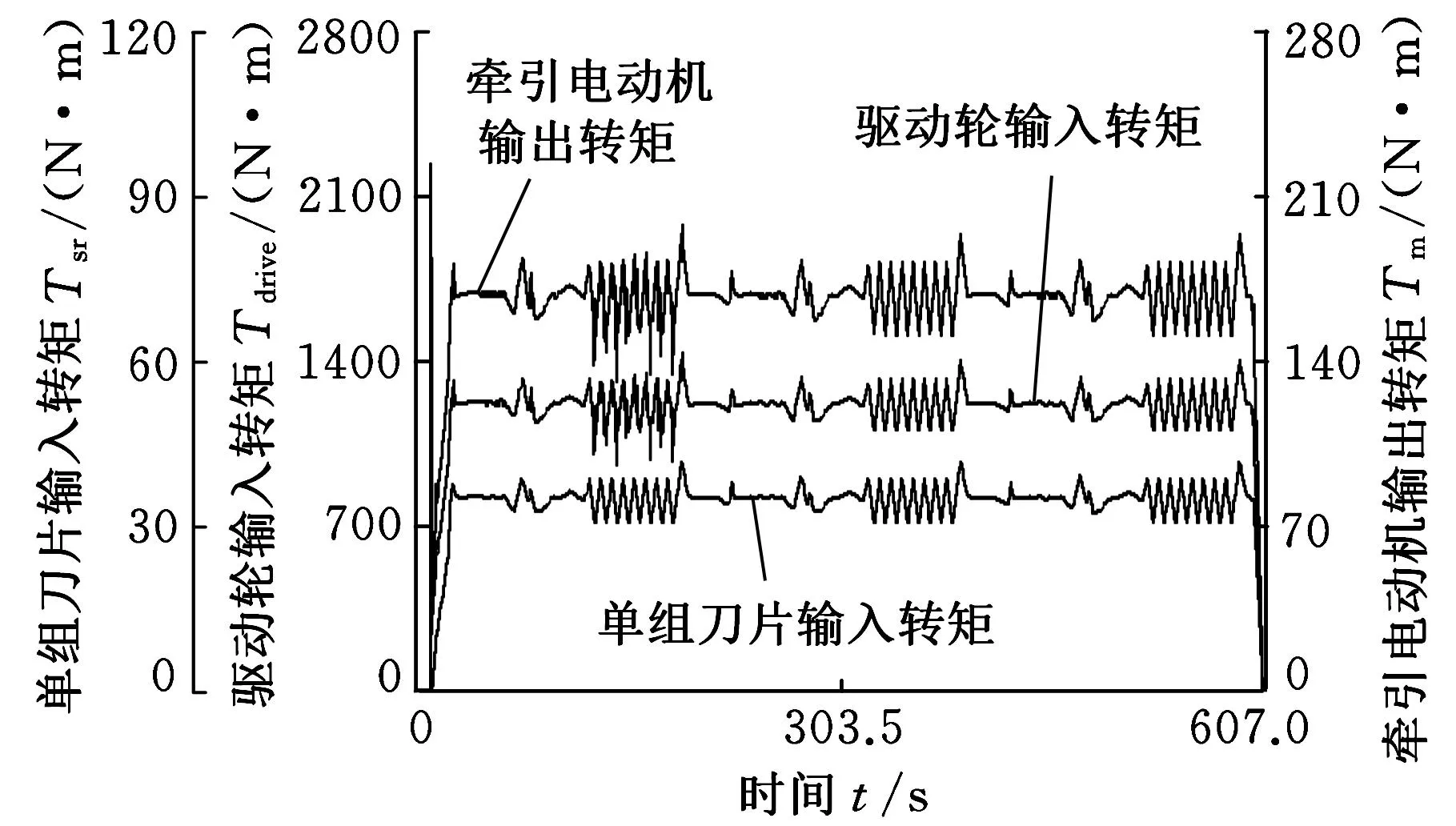
圖10 機(jī)組轉(zhuǎn)矩耦合情況
由圖11可知,旋耕機(jī)組行駛速度保持在3.65 km/h附近,刀軸轉(zhuǎn)速保持在200 r/min左右;行駛距離曲線斜率基本保持恒定。根據(jù)YTO-500拖拉機(jī)相關(guān)試驗(yàn)結(jié)果,當(dāng)其牽引型號為1GQN-180旋耕機(jī)作業(yè)時(shí),變速器保持在Ⅰ擋工作,全程車速保持在3.2 km/h左右;PTO轉(zhuǎn)速為540 r/min,刀軸轉(zhuǎn)速為200 r/min。仿真過程中機(jī)組主要部件動(dòng)力學(xué)特性符合YTO-500拖拉機(jī)試驗(yàn)結(jié)果。對比圖10、圖11可知,刀片輸入轉(zhuǎn)矩對負(fù)載轉(zhuǎn)矩的跟隨性良好。
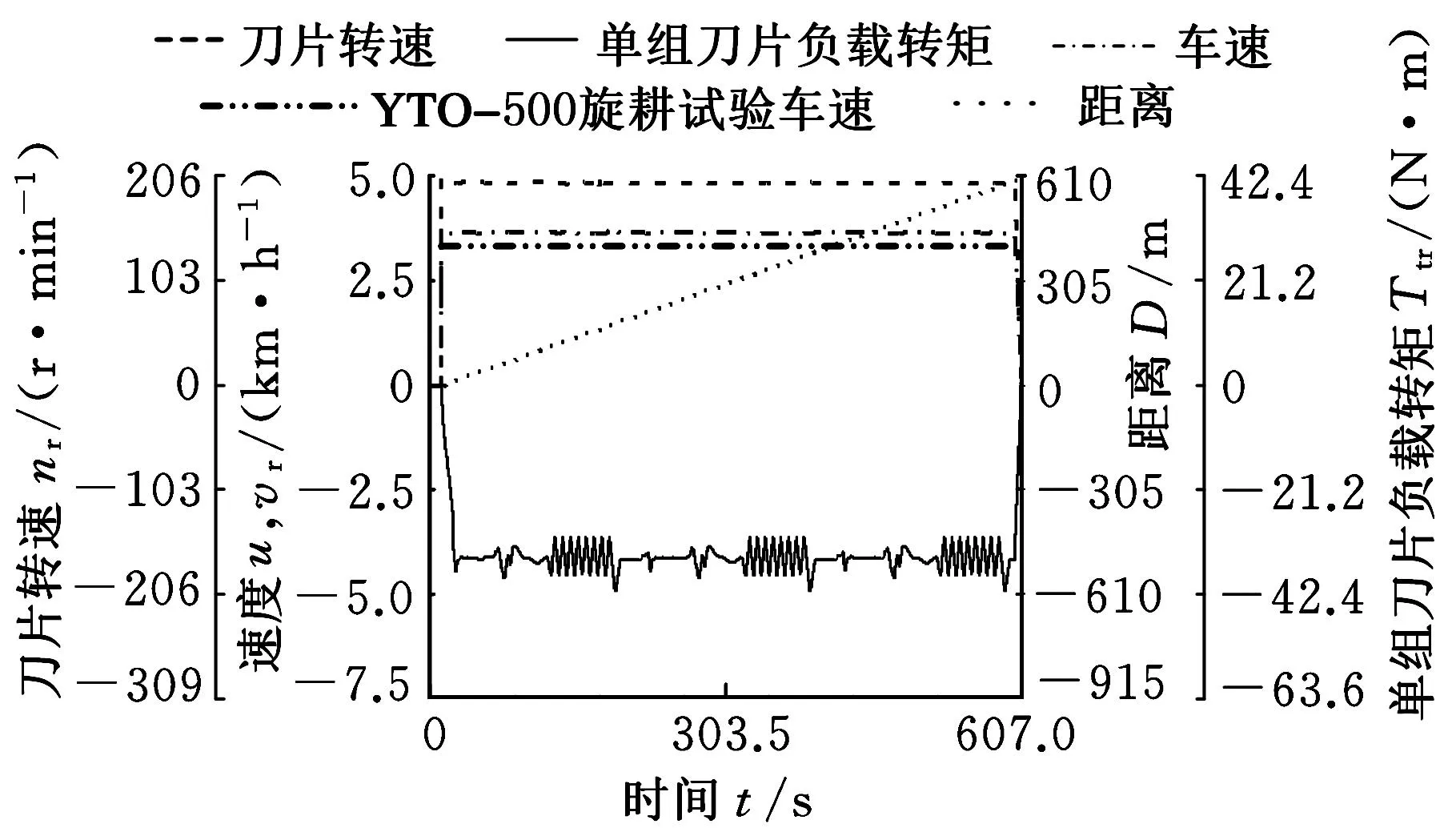
圖11 旋耕工況機(jī)組運(yùn)行情況
由圖12可知,運(yùn)行206 s后蓄電池組SOC值低于閾值下限,柴油機(jī)啟動(dòng)。充電速率大于蓄電池耗電速率,蓄電池組電功率開始下降,累積燃油消耗量開始上升;柴油機(jī)啟動(dòng)時(shí)平均燃油消耗率為8.3 L/h,全程共耗油0.93 L。
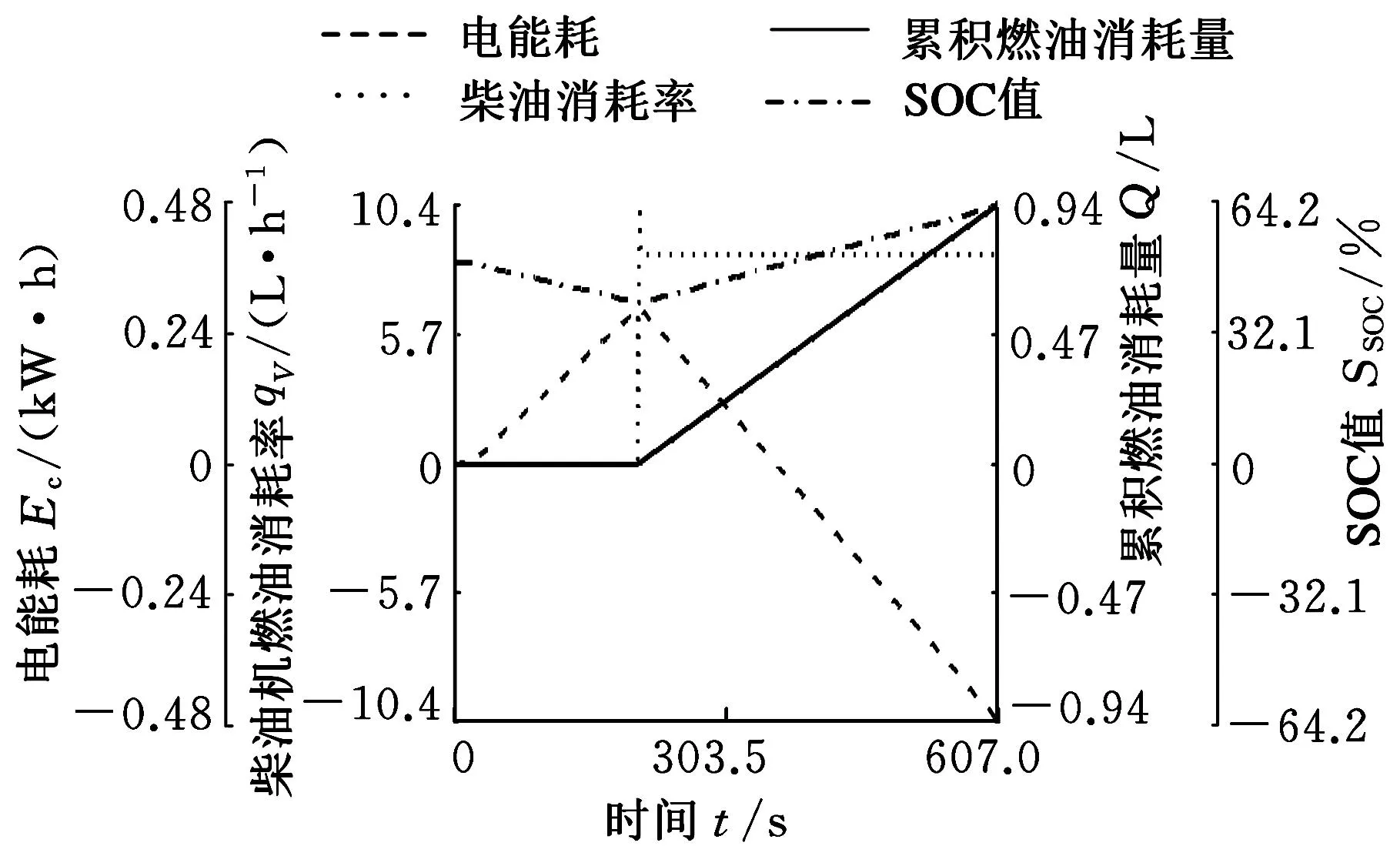
圖12 旋耕工況機(jī)組能耗情況
柴油機(jī)工作點(diǎn)分布狀況如圖13所示,圖中,粗體數(shù)字表示柴油機(jī)工作點(diǎn)分布情況(工作點(diǎn)數(shù)),點(diǎn)劃線表示等燃油消耗率,其上的數(shù)值單位為L/h。仿真過程中,柴油機(jī)工作區(qū)間穩(wěn)定,工作點(diǎn)分布較為集中,34.76%左右的工作點(diǎn)分布于柴油機(jī)啟動(dòng)特性區(qū),64.67%左右的工作點(diǎn)分布于圖中深色區(qū)域,其比率符合柴油機(jī)啟動(dòng)時(shí)間對仿真時(shí)間的比值。柴油機(jī)啟動(dòng)后的工作點(diǎn)集中區(qū)域平均油耗為9.817 L/h,仿真全程平均油耗為6.34 L/h;對傳統(tǒng)拖拉機(jī)在相似土壤條件試驗(yàn)田中旋耕作業(yè)試驗(yàn)測得的油耗為9.67~10.26 L/h,因此增程式電動(dòng)旋耕機(jī)組經(jīng)濟(jì)性提升34.4%以上。
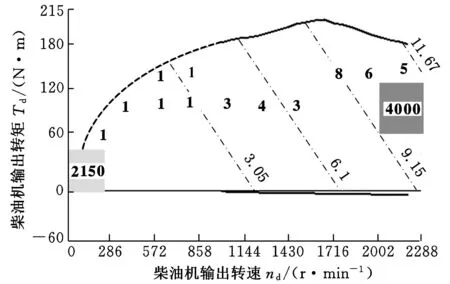
圖13 柴油機(jī)工作點(diǎn)分布狀況
電動(dòng)機(jī)的電力特性如圖14所示,平臺(tái)中能源系統(tǒng)模塊遵循恒壓控制原理,保持電壓在310 V附近,輸出電流隨負(fù)載發(fā)生變化。對比圖10可知,電動(dòng)機(jī)電流特性對行走系、旋耕機(jī)的機(jī)械特性跟隨性良好。仿真過程中,電動(dòng)機(jī)能量使用效率隨負(fù)載波動(dòng)而變化,平均可達(dá)80.7%。
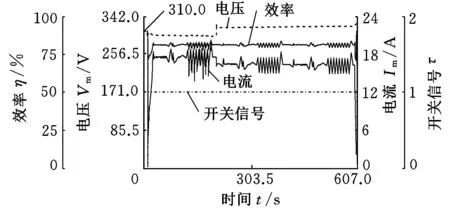
圖14 電動(dòng)機(jī)電能使用狀態(tài)
3結(jié)論
(1)建立了基于CRUISE的拖拉機(jī)整車仿真模型,該模型能有效模擬拖拉機(jī)的行駛工況和增程式電動(dòng)拖拉機(jī)能量管理策略。
(2)提出了旋耕機(jī)組等效模型,避免了單向型仿真平臺(tái)由于機(jī)組連接點(diǎn)處功率循環(huán)現(xiàn)象造成的計(jì)算問題,減小了工作量。
(3)建立了基于CRUISE的增程式電動(dòng)拖拉機(jī)旋耕機(jī)組仿真平臺(tái),仿真結(jié)果中動(dòng)力部件動(dòng)力性符合東方紅500拖拉機(jī)相關(guān)試驗(yàn)結(jié)果,電力輸出特性對負(fù)載變化情況的跟隨性良好,能有效模擬旋耕機(jī)組作業(yè)工況。
參考文獻(xiàn):
[1]農(nóng)業(yè)部. 全國農(nóng)業(yè)機(jī)械化發(fā)展第十二個(gè)五年規(guī)劃(2011-2015年)[N]. 農(nóng)機(jī)化導(dǎo)報(bào),2011-9-12(01).
[2]張鐵民,閆國琦,溫利利,等. 我國電動(dòng)力農(nóng)業(yè)機(jī)械發(fā)展現(xiàn)狀與趨勢[J]. 農(nóng)機(jī)化研究,2012(4):236-240.
Zhang Tiemin, Yan Guoqi, Wen Lili, et al. Current Situation and Development of Electric Agricultural Machinery in China[J]. Journal of Agricultural Mechanization Research, 2012(4): 236-240.
[3]王心穎,王松,張宗毅. 農(nóng)業(yè)機(jī)械化節(jié)能減排技術(shù)體系的構(gòu)建[J]. 中國農(nóng)機(jī)化,2010(4):6-10.
Wang Xinying, Wang Song, Zhang Zongyi. Construction of Energy Conservation and Emission Reduction Technology System of Agricultural Mechanization[J]. Chinese Agricultural Mechanization, 2010(4): 6-10.
[4]王慶年,于永濤,曾小華,等. 基于CRUISE軟件的混合動(dòng)力汽車正向仿真平臺(tái)的開發(fā)[J]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版),2009,39(6):1413-1419.
Wang Qingnian,Yu Yongtao,Zeng Xiaohua, et al. Development of Forward-looking Simulation Platform for Hybrid Electric Vehicle Based on Software CRUISE[J]. Journal of Jilin University(Engineering and Technology Edition),2009,39(6):1413-1419.
[5]王偉,王慶年,初亮,等. 混合動(dòng)力汽車驅(qū)動(dòng)電機(jī)性能評價(jià)體系研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào),2011,42(8):22-25.
Wang Wei, Wang Qingnian, Chu Liang, et al. Evaluation Regime of Traction Motor for Hybrid Electric Vehicle[J]. Transactions of the CSAM, 2011, 42(8): 22-25.
[6]牛禮民,馮能蓮,陳龍,等. 串聯(lián)式混合動(dòng)力電動(dòng)汽車電機(jī)控制系統(tǒng)研究[J]. 安徽農(nóng)業(yè)大學(xué)學(xué)報(bào),2007,34(4):604-607.
Niu Limin, Feng Nenglian, Chen Long, et al. Series Hybrid Power Electric Vehicle Motor Control System[J]. Journal of Anhui Agricultural University, 2007, 34(4): 604-607.
[7]Hoeijimakes M J,F(xiàn)erreira J A. The Electrical Variable Transmission[J]. IEEE Transactions on Industry Application,2006, 42(4):1092-1100.
[8]曾小華,巴特,田浩,等. 混聯(lián)混合動(dòng)力客車動(dòng)力系統(tǒng)參數(shù)匹配[J]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版),2013,42(2):278-284.
Zeng Xiaohua,Ba Te,Tian Hao,et al. Powertrain Parameter Matching of Series-parallel Hybrid Electric Bus[J]. Journal of Jilin University(Engineering and Technology Edition),2013,42(2):278-284.
[9]高建平,李曉林,郭志軍. 改進(jìn)型混合動(dòng)力汽車工況預(yù)測算法的應(yīng)用仿真[J]. 河南科技大學(xué)學(xué)報(bào):自然科學(xué)版,2013,34(2):34-38.
Gao Jianping,Li Xiaolin,Guo Zhijun. Application Simulation of Improved Prediction Algorithm for Hybrid Electric Vehicle’s Driving Cycle[J]. Journal of Henan University of Science and Technology: Natural Science,2013,34(2):34-38.
[10]曹付義, 周志立, 徐立友. 雙流傳動(dòng)履帶車輛方向盤操縱系統(tǒng)設(shè)計(jì)及仿真[J]. 河南科學(xué)大學(xué)學(xué)報(bào):自然科學(xué)版,2011,32(3):16-19.
Cao Fuyi,Zhou Zhili,Xu Liyou. Design and Simulation of Steering Wheel Control System of Tracked Vehicle of Double Flow Transmission[J]. Journal of Henan University of Science and Technology: Natural Science,2011,32(3):16-19.
[11]張明柱,周志立,徐立友,等. 拖拉機(jī)多段液壓機(jī)械無極變速器的動(dòng)力學(xué)建模及仿真[J]. 西安理工大學(xué)學(xué)報(bào),2006,22(3):269-273.
Zhang Mingzhu,Zhou Zhili,Xu Liyou,et al. Modeling and Simulation of the Multi-range Hydro-Mechanical Continuously Variable Transmission for Tractors[J]. Journal of Xi’an University of Technology,2006,22(3):269-273.
[12]曹付義, 周志立, 徐立友. 履帶車輛液壓機(jī)械差速轉(zhuǎn)向系統(tǒng)參數(shù)優(yōu)化[J]. 農(nóng)業(yè)工程學(xué)報(bào),2013,29(18):60-66.
Cao Fuyi,Zhou Zhili,Xu Liyou. Parameter Optimization of Hydro-mechanic Differential Turning System for Tracked Vehicle[J]. Transactions of the CSAE, 2013,29(18):60-66.
[13]徐立友.拖拉機(jī)液壓機(jī)械無級變速器特性研究[D]. 西安:西安理工大學(xué),2006.
[14]鄧曉亭. 混合動(dòng)力拖拉機(jī)動(dòng)力特性的研究[D]. 南京:南京農(nóng)業(yè)大學(xué),2012.
[15]趙研科. 基于起步工況的AMT拖拉機(jī)離合器結(jié)合規(guī)律研究[D]. 洛陽:河南科技大學(xué),2012.
[16]高輝松,朱思洪. 基于ADVISOR的電動(dòng)拖拉機(jī)驅(qū)動(dòng)系統(tǒng)仿真[J]. 機(jī)械設(shè)計(jì),2008,25(10):28-32.
Gao Huisong,Zhu Sihong. Simulation on Driving System of Electric Tractor Based on ADVISOR[J].Journal of Machine Design,2008,25(10):28-32.
[17]高輝松,張瑩,朱思洪. 基于ADVISOR的電動(dòng)拖拉機(jī)仿真系統(tǒng)開發(fā)與應(yīng)用[J]. 計(jì)算機(jī)仿真,2009,26(2):283-285.
Gao Huisong,Zhang Ying,Zhu Sihong. Development and Application of Electric Tractor Simulation System Based on ADVISOR[J].Computer Simulation,2009,26(2):283-285.
[18]孫強(qiáng),白書戰(zhàn),李國祥,等. 履帶式推土機(jī)動(dòng)力傳動(dòng)系統(tǒng)推土工況建模與仿真[J]. 農(nóng)業(yè)工程學(xué)報(bào),2012,28(7):57-61.
Sun Qiang,Bai Shuzhan,Li Guoxiang,et al. Modeling and Simulation of Power Transmission of Crawler Bulldozer[J]. Transactions of the CSAE,2012,28(7):57-61.
[19]王保華,羅永革. 基于CRUISE的汽車建模與仿真[J].湖北汽車工業(yè)學(xué)院學(xué)報(bào),2005,19(2):5-8.
Wang Baohua,Luo Yongge. Simulation and Modeling of Vehicle Based on CRUISE Software[J].Journal of Hubei Automotive Industries Institute,2005,19(2):5-8.
[20]賈鴻社,周志立,周政. 拖拉機(jī)機(jī)組系統(tǒng)研究現(xiàn)狀及展望[J]. 拖拉機(jī)與農(nóng)用運(yùn)輸車,2000(4):13-17.
Jia Hongshe, Zhou Zhili, Zhou Zheng. Study and Outlook of Tractor Unit Systems[J]. Tractor & Farm Transpoter, 2000(4): 13-17.
[21]周志立,方在華. 拖拉機(jī)機(jī)組牽引動(dòng)力學(xué)[M]. 北京:科學(xué)出版社,2010.
[22]徐立友,劉孟楠,周志立. 串聯(lián)式混合動(dòng)力拖拉機(jī)驅(qū)動(dòng)系設(shè)計(jì)[J]. 農(nóng)業(yè)工程學(xué)報(bào),2014,30(9):11-18.
Xu Liyou, Liu Mengnan, Zhou Zhili. Design of Drive System for Series Hybrid Electric Tractor[J]. Transactions of the CSAE, 2014, 30(9): 11-18.
(編輯蘇衛(wèi)國)
Establishment of Extended Range Electric Tractor and Its Rotary Cultivator’s Simulative Platforms
Liu Mengnan1Xu Liyou2Zhou Zhili2Liu Weiguo3
1.Xi’an University of Technology,Xi’an,710048 2.Henan University of Science and Technology,Luoyang,Henan,471003 3.Research Institution of Construction Machinery,China SINOMACH Heavy Industry Corporation,Luoyang,Henan,471009
Abstract:Aimed at the existing conditions that simulation methods of in the field of electric tractor research were non-universal, and the simulation platforms concerned with working units were without complete functions. YTO-500 tractor was selected as the research object, the structural project and the driving parameters of the electric tractor were designed, the simulative platform of extended range electric tractor was established based on CRUISE. By simulating tractive behaviors of the electric and the traditional tractor, and analyzing the surficial behavior and consumption of diesel as the tractor was on a cyclic slow working conditions, the resulting curves express that this platform can simulate tractor’s running conditions well. By researching the coupling relationship of torques among its power train, driving train and PTO(power take off), an equivalent model was taken out. Simulation platform of extended range electric tractor’s rotary cultivator was established. The simulation expresses that the speed of the working unit approximately maintains 3.65 km/h, the rotate speed of the rotary cultivator’s principal axis maintains 200 r/min, the simulation results correspond to the YTO 500 tractor’s experiments. By comparison, the speed increases by 14%, and the consumption of fuel decreases by 34.4%.
Key words:electric tractor; rotary cultivator; performance analysis;simulation platform
收稿日期:2015-04-07
基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(51375145);河南省科技攻關(guān)計(jì)劃資助項(xiàng)目(102102210165)
中圖分類號:S219.4
DOI:10.3969/j.issn.1004-132X.2016.03.024
作者簡介:劉孟楠,男,1990年生。西安理工大學(xué)機(jī)械與精密儀器工程學(xué)院博士研究生。主要研究方向?yàn)榈孛孳囕v電驅(qū)動(dòng)系統(tǒng)及機(jī)組優(yōu)化匹配。徐立友,男,1974年生。河南科技大學(xué)車輛與交通工程學(xué)院副院長、教授。周志立,男,1957年生。河南科技大學(xué)副校長、教授。劉衛(wèi)國,男,1962年生。國機(jī)重工建筑機(jī)械有限公司研究所工程師。
