HXJ135C海洋修井機吊裝和拖航設計
2016-06-28 16:08:30周洪軍杜漢文
天津科技 2016年6期
關鍵詞:方向
周洪軍,丁 輝,杜漢文
(中海油能源發展裝備技術有限公司 天津300452)
HXJ135C海洋修井機吊裝和拖航設計
周洪軍,丁 輝,杜漢文
(中海油能源發展裝備技術有限公司 天津300452)
海洋修井機建造完成后需要進行陸地組裝,并通過船舶運輸至相關海域開展吊裝作業。而海洋修井機各組件都是復雜的大型金屬鋼架結構,質量大且載荷分布不均勻,并安裝有各種機械設備,不能承受沖擊和碰撞,給吊裝和拖航造成較大困難。因此,在對海洋修井機進行海上運輸吊裝時,在復雜海況下的慣性力和其他環境載荷作用下,可能會對拖航、吊裝的安全性和設備造成影響。以HXJ135C海洋修井機為例,結合相關標準規范、力學理論等,利用有限元軟件,對碼頭吊裝、拖航進行方案設計,旨在為項目提供支持。
海洋修井機 吊裝 拖航 校核
0 引 言
目前,海洋修井機通常在陸地碼頭完成下底座、鉆臺上底座、井架的組裝后,再與其他附件吊裝至駁船進行加固,并運輸至指定平臺。海洋修井機各組件都是復雜的大型金屬鋼架結構,質量大且載荷分布不均,并安裝有各種機械設備,不能承受沖擊和碰撞。這給吊裝和拖航過程帶來了較大難度,需要根據各部件參數,制定合理規范的吊裝和拖航方案,以滿足工程實際要求。
HXJ135C海洋修井機組裝完成后3大件的外形尺寸和重量清單如表1所示。
利用結構基本載荷數據,結合相關力學理論和標準規范,對整體結構進行簡化分析,并對關鍵部位進行仿真校核,能夠得到與實際較符合的結果,縮短了整體建模分析的時間。
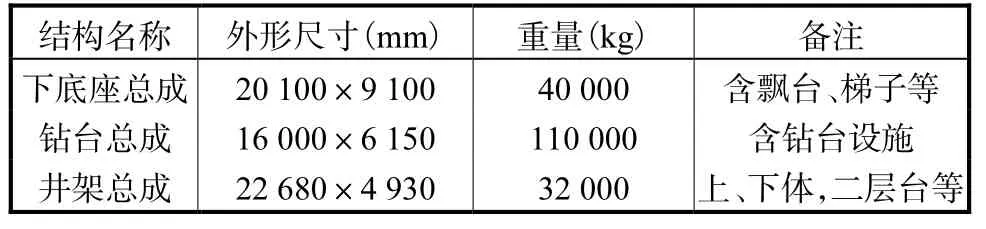
表1 海洋修井機3大件外形尺寸及重量清單Tab.1List of dimensions and weights of marine drilling rig’s three major components
1 吊裝方案設計
1.1 井架總成吊裝
HXJ135C海洋修井機選用HJJ13533C型井架,由井架上體、井架下體、二層臺等附件組成。組裝完成后,井架上體完全縮回并由鎖緊銷固定。4處吊耳的位置分別位于井架下體2根結構立柱上,查閱井架三維模型的重心位置,仍在井架框架內部,近似可認為在幾何形心位置,可利用井架本體吊點進行吊裝。
1.2 吊裝力學計算
3大件吊裝均選用四肢鋼絲繩(見圖1),鋼絲繩實際受力為:

Φ36.5×14,000,mm鋼絲繩的破斷拉力為:666.5,kN,鋼絲繩容許拉力:[1]

式中:a為鋼絲繩之間載荷不均勻系數,6×19鋼絲繩取0.85;為鋼絲繩的鋼絲破斷拉力總和(kN); K為鋼絲繩使用安全系數。
由上述可知,2P>1P,鋼絲繩型號完全能夠滿足使用要求,卸扣采用額定載荷為21,t的高強度卸扣,銷軸直徑為39,mm。
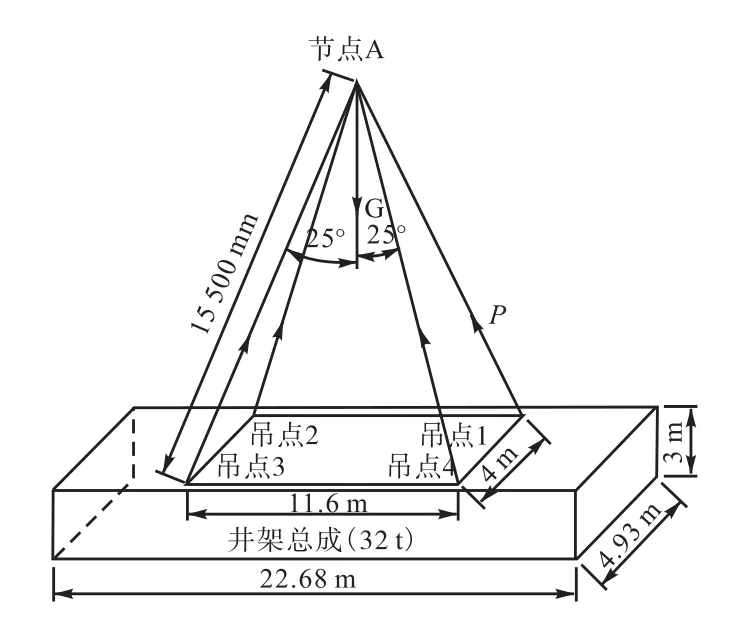
圖1 井架總成吊裝受力分析Fig.1 Force analysis of derrick assembly hoisting
1.3 吊耳強度校核
選取吊點2計算校核結構強度。吊耳處受力最大為127.3,kN,吊耳材質為Q345B(δ30,mm),索具長度為14,m,吊裝角度為63.63 °。利用CAD自帶有限元功能模擬得到圖2所示結果。[2]
根據受力分析可知:吊耳處承受的最大力為115.16,MPa。Q345B(δ=30,mm)屈服強度為325,MPa,低于材料的屈服應力。因此,井架的吊耳強度滿足吊裝要求。
安全系數為:

運用此方法可確定鉆臺總成、下底座總成的吊裝鋼絲繩及卸扣規格型號(見表2)。

圖2 吊耳處應力分布圖Fig.2 Stress distribution in hanging ear

表2 下底座/鉆臺總成吊裝索具卸扣選型Tab.2Parameters of hoisting gear shackles on bottom base & drilling floor assemblies
2 拖航方案設計
2.1 慣性力概述
修井機在陸地建造完后,大多采用駁船固定運輸至指定平臺。在運輸過程中,結構件會隨著駁船在波浪作用下產生運動。船體的運動形式有:橫蕩、縱蕩、升沉、橫搖、縱搖、平搖。前3種形式的運動為船體的平動,后3種運動形式為船體沿本身運動中心的轉動。這些運動均會產生加速度,從而使其裝載的結構物產生與加速度相反的慣性力。根據剛體平動和轉動理論,慣性力等于平動慣性力、轉動切向慣性力在坐標軸分量、轉動法向慣性力沿坐標軸的分量之和。[3]
2.2 設計參數
HXJ135C海洋修井機使用“ZR1501”號駁船完成拖航,具體參數為:船長120,m,船寬30.5,m,船深7.6,m,排水量3,636,t。
2.3 拖航風載
拖航分析中應選取重現期為10年、持續時間3,s的平均風速,并且按照《API RP 2A-WSD海上固定平臺規劃、設計和建造的推薦作法——荷載和抗力系數設計法》中的規定計算模塊鉆機所受風力(見表3)。
風速:Vw:31.1,m/s
形狀系數:Cs:1.0
高度系數:Ch:1.32
根據API Spec 4F,建筑物高于水平面大約0~15,m,Ch=1.2,高度每增加15,m,高度系數增加10%。
風載計算公式:

2.4 結構分析
2.4.1 拖航工況
HXJ135C海洋修井機共分為3大模塊,運輸時固定在ZR1501駁船甲板上,擺放位置如圖3所示;運輸時由于縱搖和橫搖,3大模塊存在滑移和傾覆的可能性,固定時應該從阻止模塊從X方向和Y方向滑移和傾覆兩種可能性上考慮。泥漿泵和泥漿泵動力橇為整體設備,尺寸和噸位較小,因此不對其進行計算分析,只針對3大模塊進行計算分析。
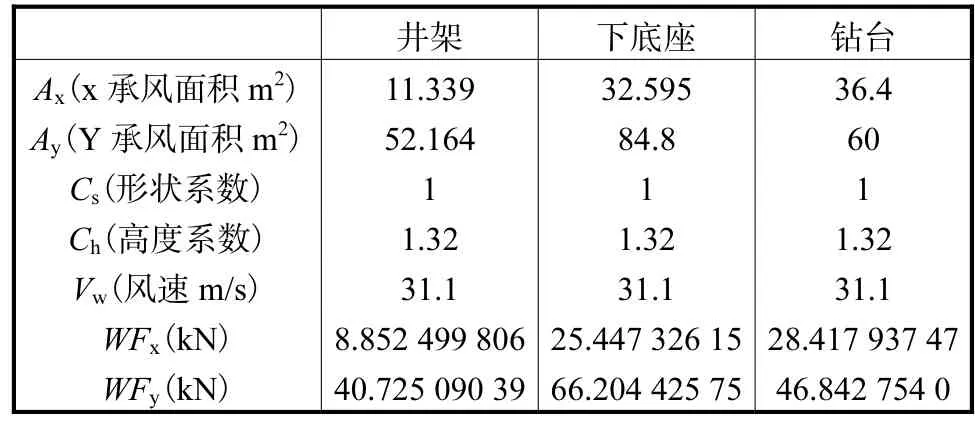
表3 筑物高于水平面Tab.3Wind load calculation results of three major components of workover rig

圖3 駁船擺放圖Fig.3 Layout of the barge
2.4.2 橫搖和縱搖中心
以駁船拖航時的橫搖和縱搖中心為坐標原點,根據拖航示意圖,可計算得到修井機各模塊重心相對拖航時縱搖橫搖中心的三坐標及搖擺半徑如表4所示:

表4 以橫搖和縱搖中心為原點的相關參數Tab.4 Parameters of center of gravities of the three major components of workover rig
2.4.3 駁船拖運時參數
風載方向示意圖如圖4所示,參數見表5:
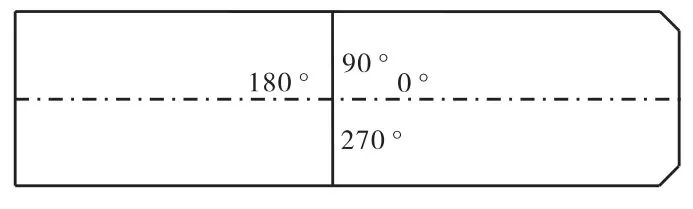
圖4 風載方向示意圖Fig.4 Sketch map of wind directions
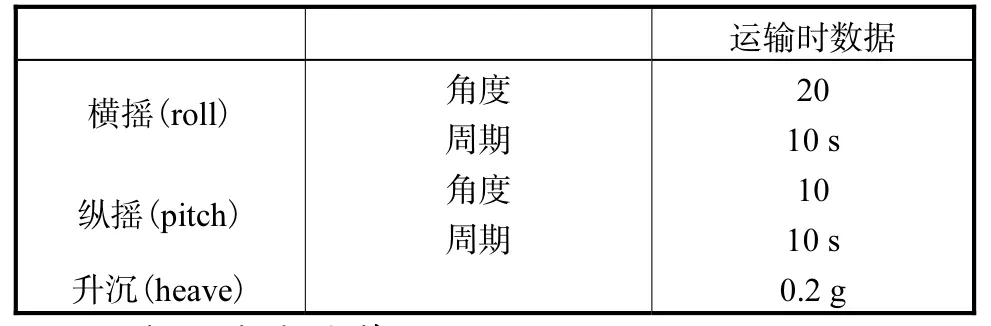
表5 拖運時參數Tab.5Towing parameters of the three major components of workover rig
2.4.4 角加速度計算
橫搖角度(roll):Ar=20deg ;周期:Tr=10sec
縱搖角度(pitch):Ap=10deg ;周期:Tp=10sec
升沉加速度:ah=0.2g
重力加速度:W=1.0g
2.4.5 拖航力的計算
根據拖航工況,縱搖和橫搖產生的力計算如下,計算公式及其符號如下:
2.4.5.1 橫搖產生橫向的力(Y方向)
重力加速度Y方向分量:FTRrs=W×sin(Ar)
橫搖加速度Y方向分量:FTRrd=W×εr×Rr/g
升沉加速度Y方向分量:

2.4.5.2 縱搖產生的橫向力(X方向)
升沉加速度X方向分量:

橫搖產生的橫向力計算結果如表6所示(Y向):

表6 橫搖產生的橫向力計算結果(Y向)Tab.6 Calculation results of transverse force(Y direction)
縱搖產生的縱向力計算結果如表7所示(X向):

表7 搖產生的縱向力計算結果(X向)Tab.7 Calculation results of longitudinal force(X direction)
根據拖航工況,考慮橫搖(R)、縱搖(P)、升沉(H)的各種工況組合,共分為8種工況,即:+R+H,-R+H, +R-H,-R-H,+P+H,-P+H,+P-H,-P-H。風載選取最惡劣工況,[4]具體計算數據如表8、表9所示:

表8 拖航工況組合(a)Tab.8 Towing condition combination (a)

表9 拖航工況組合(b)Tab.9 Towing condition combination (b)
2.4.6 3大模塊重量
根據現場3大模塊各部件重量清單,總重量如表10所示:

表10 修井機3大件重量清單Tab.10 List of weights of the three major components of workover rig
2.4.7 加固方案及受力分析
3大模塊通過定位塊和鋼絲繩固定在甲板上,根據拖航工況及安裝方案,運輸過程中存在滑移和傾覆的可能,因此固定方案采用定位塊限制滑移,鋼絲繩拉緊3個模塊防止傾覆的措施。
根據修井機拖航方案及上述計算可知,拖航時作用于3大模塊的力簡化為風力、橫搖、縱搖及模塊自身的重力;其中和Y方向的慣性力及風力遠大于X方向的力,且修井機左右加固撐相同;因此,滑移校核只要分析計算橫搖-升沉時Y方向一側受力即可;由于3大模塊屬長方形模塊,長邊沿X軸方向布置,X方向所受的風力及慣性力遠小于Y方向,因此只需校核Y方向不傾覆,X方向也是安全的。
2.6 抗傾覆校核
按照支撐位置和模塊重心位置,井架模塊可簡化為長方形模塊,長×寬×高為:22,680×4,930×2,300,重量估重為32,000,kg,固定方案模型簡化如圖5所示:
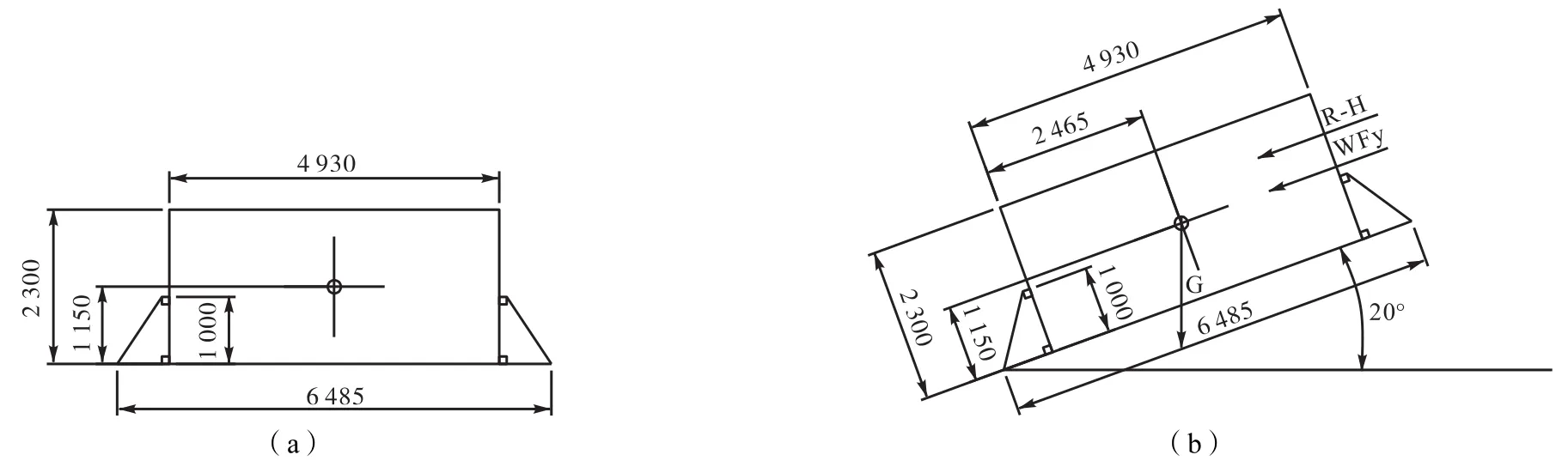
圖5 井架撬塊簡化模型及分析Fig.5 Simplified model and analysis of derrick skid block
2.6.1 滑移校核
選取R-H慣性力,270 °風載的外加力,計算如下:
2.6.1.1 重力在滑移方向分力
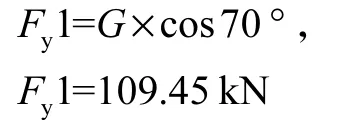
慣性力在滑移方向作用力為:
2.6.1.1 滑移方向作用力
井架限位及固定時,單邊設置4個定位塊7,1個定位塊8,并分析主要承受剪切力。
剪切應力取安全[σ]0.6倍
2.6.2 傾覆計算
由于在外力的作用下有傾覆的趨勢,選取外力R-H,風載為270 °校核,如果在此位置不傾覆,則井架不存在傾覆的危險:
傾覆力矩:

重力分量的反力矩:
根據此法,可確定下底座總成、鉆臺總成慣性力,進一步校核在各種組合海況下,構件傾覆的可能性。經計算,均滿足標準規范要求。
3 結 語
根據結構件特點,結合整體受力分析和吊耳有限元計算,確定了最佳的吊裝方案。拖航設計結合環境條件和橫搖、縱搖、升沉所產生的慣性力影響,分析整體傾覆可能,保證拖航方案的科學有效性。
HXJ135C海洋修井機吊裝和拖航方案的確定為施工提供科學依據,按照此法圓滿完成吊裝和拖航任務,該海洋修井機已順利就位并安裝使用,得到業主的認可。■
[1] 張曉軍. 井口管匯橇塊整體吊裝方案設計[J]. 石油礦場機械,2004,33(2):53-55.
[2] 劉鴻文. 材料力學[M]. 北京:高等教育出版社,2004.
[3] 哈爾濱工業大學理論力學教研室. 理論力學[M]. 北京:高等教育出版社,2009.
[4] 王寧,徐田甜. 西江23-1油田平臺模塊海上吊裝優化設計[J]. 石油礦場機械,2007,36(8):26-30.
Design of Hoisting and Towing of HXJ135C Marine Workover Rig
ZHOU Hongjun,DING Hui,DU Hanwen
(CNOOC EnerTech Equipment Technology Co.,Ltd.,Tianjin 300452,China)
After the completion of the construction of marine workover rig,land assembly work is required,and the lifting operation will be carried out in designated sea area by ship transportation.As most components of marine workover rig machine have a large and complex steel frame structure,which features large deaload and uneven load distribution,and the rig machine is affixed with a variety of machineries and equipment,it is unable to bear impact and collision.As a result,its lifting and towing process is very difficult.Therefore,during the transportation and lifting of marine workover rig,the safety of towing and lifting of the machine and the machine itself may be affected by inertial force and other environmental loads when under complicated sea conditions.This paper takes HXJ135C marine workover rig as an example,designs a terminal lifting and towing scheme on the basis of relevant standards and mechanical theory by using finite element software,aiming to provide support for the project.
marine workover rig;hoisting;towing;check
TE935
A
1006-8945(2016)06-0070-05
2016-05-20
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50