基于彈體動(dòng)力學(xué)信息的速率陀螺濾波
2016-07-01 01:09:51陳紅英羅文田
飛行力學(xué) 2016年3期
陳紅英, 羅文田
(1.中國(guó)民用航空飛行學(xué)院 飛行技術(shù)學(xué)院, 四川 廣漢 618307;2.中國(guó)民用航空飛行學(xué)院 航空工程學(xué)院, 四川 廣漢 618307)
基于彈體動(dòng)力學(xué)信息的速率陀螺濾波
陳紅英1, 羅文田2
(1.中國(guó)民用航空飛行學(xué)院 飛行技術(shù)學(xué)院, 四川 廣漢 618307;2.中國(guó)民用航空飛行學(xué)院 航空工程學(xué)院, 四川 廣漢 618307)
摘要:針對(duì)使用低精度慣性器件的戰(zhàn)術(shù)制導(dǎo)武器中速率陀螺精度低、噪聲大的問(wèn)題,提出了一種基于彈體動(dòng)力學(xué)信息降低陀螺噪聲的方法。該方法通過(guò)將彈體姿態(tài)動(dòng)力學(xué)方程與擴(kuò)展卡爾曼濾波算法相結(jié)合來(lái)構(gòu)建濾波器,并在飛行過(guò)程中利用導(dǎo)彈的先驗(yàn)特征信息和實(shí)測(cè)的執(zhí)行機(jī)構(gòu)信息來(lái)實(shí)時(shí)校正陀螺的測(cè)量值;然后從理論上證明了所建立非線性濾波系統(tǒng)是局部可觀測(cè)和有效的。仿真結(jié)果表明,該濾波方法可以有效地抑制速率陀螺的測(cè)量誤差。
關(guān)鍵詞:速率陀螺; 彈體動(dòng)力學(xué); 擴(kuò)展卡爾曼濾波器; 局部可觀測(cè)性; 半實(shí)物仿真
0引言
速率陀螺是導(dǎo)彈姿態(tài)控制系統(tǒng)的基本測(cè)量裝置,對(duì)于小型戰(zhàn)術(shù)導(dǎo)彈,由于其作用對(duì)象、作用距離和成本等原因,越來(lái)越多地使用微機(jī)械電子系統(tǒng)(MEMS)陀螺。MEMS陀螺具有成本低、尺寸小、重量低等優(yōu)點(diǎn);但因其精度較低,且需要直接安裝在彈體上測(cè)量彈體的角速度而制約了其應(yīng)用。由于飛行過(guò)程中的動(dòng)態(tài)環(huán)境較為惡劣,使得陀螺的輸出信號(hào)有更大的噪聲,提取的角速度信息有很大誤差。針對(duì)這種情況,傳統(tǒng)的解決思路是對(duì)陀螺系統(tǒng)本身和其誤差機(jī)理建模分析,并設(shè)計(jì)相應(yīng)的降噪算法[1-2]。Koifman等[3]在20世紀(jì)90年代提出了利用飛行器動(dòng)力學(xué)模型輔助慣性導(dǎo)航系統(tǒng)工作的方法,并進(jìn)行了數(shù)學(xué)仿真驗(yàn)證。這是一種利用載體動(dòng)力學(xué)信息對(duì)傳感器誤差進(jìn)行修正的新思路。近年來(lái),將這種思路應(yīng)用于水下航行器和陸地航行器的算法也相應(yīng)提出[4-5]。對(duì)于氣動(dòng)參數(shù)等預(yù)知信息確定的導(dǎo)彈,可以建立描述其迎角、氣動(dòng)力矩、彈體轉(zhuǎn)動(dòng)角速度及執(zhí)行機(jī)構(gòu)信息等物理量之間關(guān)系的數(shù)學(xué)模型。
本文借鑒了利用載體信息的修正測(cè)量系統(tǒng)的思想,提出了一種通過(guò)彈體動(dòng)力學(xué)模型信息構(gòu)建卡爾曼濾波器,對(duì)飛行過(guò)程中的角速度測(cè)量值進(jìn)行快速實(shí)時(shí)校正的方法。
1動(dòng)力學(xué)濾波模型和濾波器的構(gòu)建
卡爾曼濾波器的工作原理是通過(guò)系統(tǒng)模型估計(jì)出當(dāng)前時(shí)刻的狀態(tài)量,并與實(shí)際的測(cè)量值來(lái)加權(quán)修正狀態(tài)量。因此卡爾曼濾波器效果的優(yōu)劣將主要取決于對(duì)目標(biāo)內(nèi)部狀態(tài)變化規(guī)律建模的真實(shí)程度。對(duì)于一般的近程戰(zhàn)術(shù)導(dǎo)彈,可以將彈體的姿態(tài)運(yùn)動(dòng)用剛體繞質(zhì)心轉(zhuǎn)動(dòng)的運(yùn)動(dòng)方程來(lái)描述。
1.1動(dòng)力學(xué)濾波模型
根據(jù)彈體動(dòng)力學(xué)方程[6],彈體三通道力矩與彈體三軸角速度存在如下關(guān)系:
(1)
對(duì)于三通道獨(dú)立的軸對(duì)稱導(dǎo)彈,在氣動(dòng)布局和外形參數(shù)給定的情況下,氣動(dòng)力矩M又可以表示為如下形式:
(2)
通常情況下速率陀螺捷聯(lián)彈體安裝,因此測(cè)量得到彈體系下的角速度ωb,根據(jù)彈體系和速度系的關(guān)系,并且考慮到飛行過(guò)程中迎角、側(cè)滑角和滾轉(zhuǎn)角為小量,經(jīng)推導(dǎo)可以得到關(guān)于迎角和側(cè)滑角的姿態(tài)動(dòng)力學(xué)方程:
(3)
(4)
式中:a34,a35,b34,b37為動(dòng)力系數(shù);fα(…),fβ(…)為推導(dǎo)過(guò)程中由于模型簡(jiǎn)化而導(dǎo)致的誤差量。
系統(tǒng)方程式(1)、式(3)和式(4)是一組非線性微分方程,因此無(wú)法使用標(biāo)準(zhǔn)卡爾曼濾波器進(jìn)行濾波。為此,本文采用了擴(kuò)展卡爾曼濾波(EKF)。該算法的思路是先進(jìn)行模型的局部線性化近似,再利用關(guān)于線性系統(tǒng)的卡爾曼濾波方法對(duì)非線性系統(tǒng)進(jìn)行濾波。EKF具有算法簡(jiǎn)單、計(jì)算量小等優(yōu)點(diǎn),是目前工程上應(yīng)用最廣泛的一種高斯非線性濾波算法。
1.2擴(kuò)展卡爾曼濾波器
根據(jù)上文建立的彈體動(dòng)力學(xué)模型,選取濾波系統(tǒng)狀態(tài)變量為:
式中:Mx0,My0,Mz0為由導(dǎo)彈氣動(dòng)外形不對(duì)稱和制造誤差產(chǎn)生的力矩,不會(huì)隨著飛行狀態(tài)變化而改變,故希望可以通過(guò)濾波器對(duì)其進(jìn)行估計(jì)。



(5)
其中:
式中:wωx,wωy,wωz為系統(tǒng)關(guān)于角速度方程建模的誤差量,主要由mz(…)等忽略的小力矩項(xiàng)和擬合的氣動(dòng)力矩參數(shù)與真實(shí)飛行過(guò)程中的偏差造成,這里將其作為白噪聲處理;wα,wβ分別為系統(tǒng)關(guān)于迎角和側(cè)滑角方程建模的誤差量,主要由fα(…),fβ(…)等在模型推導(dǎo)過(guò)程中進(jìn)行簡(jiǎn)化導(dǎo)致的偏差以及氣動(dòng)力偏差造成,在模型中同樣作為白噪聲處理。

(6)
其中:
(7)
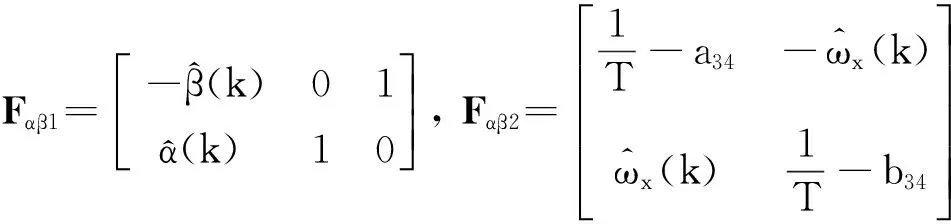
將原狀態(tài)方程(5)轉(zhuǎn)變?yōu)?

(8)

(9)
其中:
式中:V(k)為角速度的測(cè)量噪聲。則原系統(tǒng)在濾波狀態(tài)值處線性化為式(8)和式(9)的形式,這時(shí)即可以用標(biāo)準(zhǔn)卡爾曼濾波方程進(jìn)行濾波計(jì)算。
2系統(tǒng)可觀測(cè)性分析
對(duì)于線性系統(tǒng)的可觀測(cè)性分析方法很多,如奇異值分解法、分段定常理論(PWCS)等。而對(duì)于非線性系統(tǒng)的可觀測(cè)性分析,現(xiàn)有的方法主要分為兩類:一類是將非線性系統(tǒng)化為線性系統(tǒng)后,再利用線性系統(tǒng)可觀測(cè)性分析方法;另一類是利用非線性系統(tǒng)的局部可觀測(cè)性理論[7-9]。本文采用局部可觀測(cè)性理論對(duì)濾波系統(tǒng)進(jìn)行分析。
2.1局部可觀測(cè)性判據(jù)
考慮如下非線性系統(tǒng):
(10)
式中:X∈Rn為系統(tǒng)的n維狀態(tài)向量;Z∈Rm為系統(tǒng)的m維觀測(cè)量;f(X),h(X)分別為系統(tǒng)的狀態(tài)方程和觀測(cè)方程。
非線性系統(tǒng)的可觀測(cè)性理論基于如下定義:
h沿f的各階李導(dǎo)數(shù)為:
(11)
式中:k=1,2,…,n-1。同時(shí)定義:
(12)
記系統(tǒng)∑的觀測(cè)矩陣為:
(13)
如果rank(Q(X0))=n,那么稱系統(tǒng)在X0點(diǎn)滿足可觀測(cè)性秩條件。
引理1:如果系統(tǒng)∑在X0點(diǎn)滿足可觀測(cè)性秩條件,那么系統(tǒng)在X0點(diǎn)局部弱可觀。
引理2:如果系統(tǒng)∑在定義區(qū)間內(nèi)的每個(gè)點(diǎn)X滿足可觀測(cè)性秩條件,那么系統(tǒng)局部弱可觀測(cè)。
下面利用可觀測(cè)性秩判據(jù)分析濾波系統(tǒng)的可觀測(cè)性。
2.2局部可觀測(cè)性分析
對(duì)于軸對(duì)稱導(dǎo)彈,y軸轉(zhuǎn)動(dòng)慣量與z軸轉(zhuǎn)動(dòng)慣量幾乎相等,即Jy-Jz≈0;并且導(dǎo)彈對(duì)于x軸的轉(zhuǎn)動(dòng)慣量Jx?Jy,Jz,即(Jy-Jx)/Jz≈1。
基于上述假設(shè),對(duì)推導(dǎo)過(guò)程進(jìn)行簡(jiǎn)化,去除影響較小的項(xiàng),得觀測(cè)方程系統(tǒng)的李導(dǎo)數(shù)為:
(14)
其中:
則得系統(tǒng)的觀測(cè)矩陣為:
(15)

3半實(shí)物仿真分析
為了進(jìn)一步驗(yàn)證彈體動(dòng)力學(xué)信息濾波算法的有效性,利用某短程制導(dǎo)導(dǎo)彈半實(shí)物仿真樣機(jī)進(jìn)行仿真試驗(yàn)。動(dòng)力學(xué)參數(shù)采用彈體真實(shí)參數(shù):質(zhì)量m=9.5kg,參考長(zhǎng)度L=1.2m,參考面積S=0.013 3m2;轉(zhuǎn)動(dòng)慣量為Ix=0.038kg·m2,Iy=0.881kg·m2,Iz=0.882kg·m2;初始飛行速度Ma=0.7。
試驗(yàn)彈道采用程控彈道,通過(guò)轉(zhuǎn)臺(tái)模擬飛行器做繞三軸擺動(dòng)的飛行動(dòng)作。濾波系統(tǒng)通過(guò)彈上計(jì)算機(jī)對(duì)速率陀螺數(shù)據(jù)進(jìn)行實(shí)時(shí)修正。仿真結(jié)果如圖1~圖4所示,陀螺測(cè)量值誤差和濾波誤差的均值和均方差統(tǒng)計(jì)如表1所示。
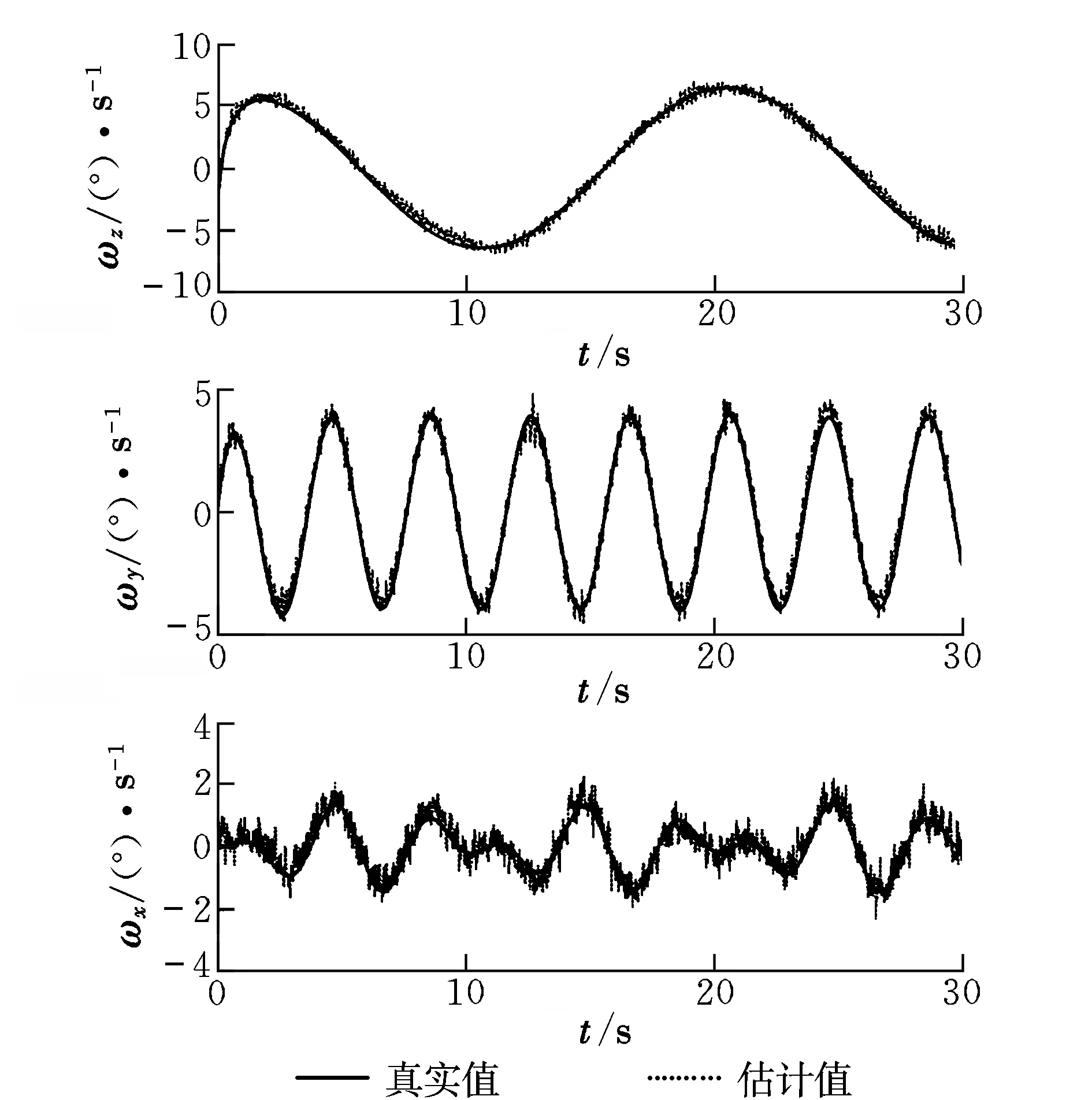
圖1 角速度真實(shí)值和濾波估計(jì)值Fig.1 Truth value and estimated value of angular rate
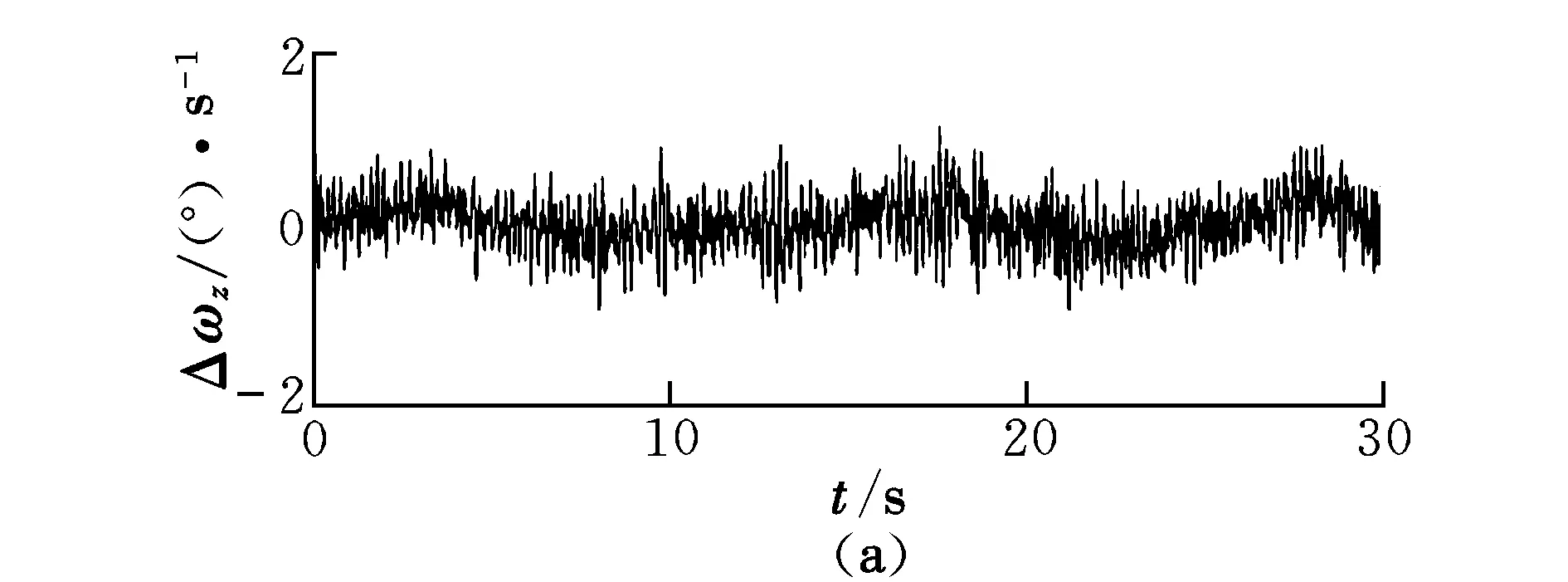
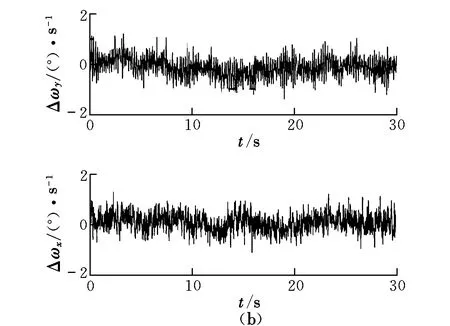
圖2 角速度濾波誤差Fig.2 Filtering error of angular rate
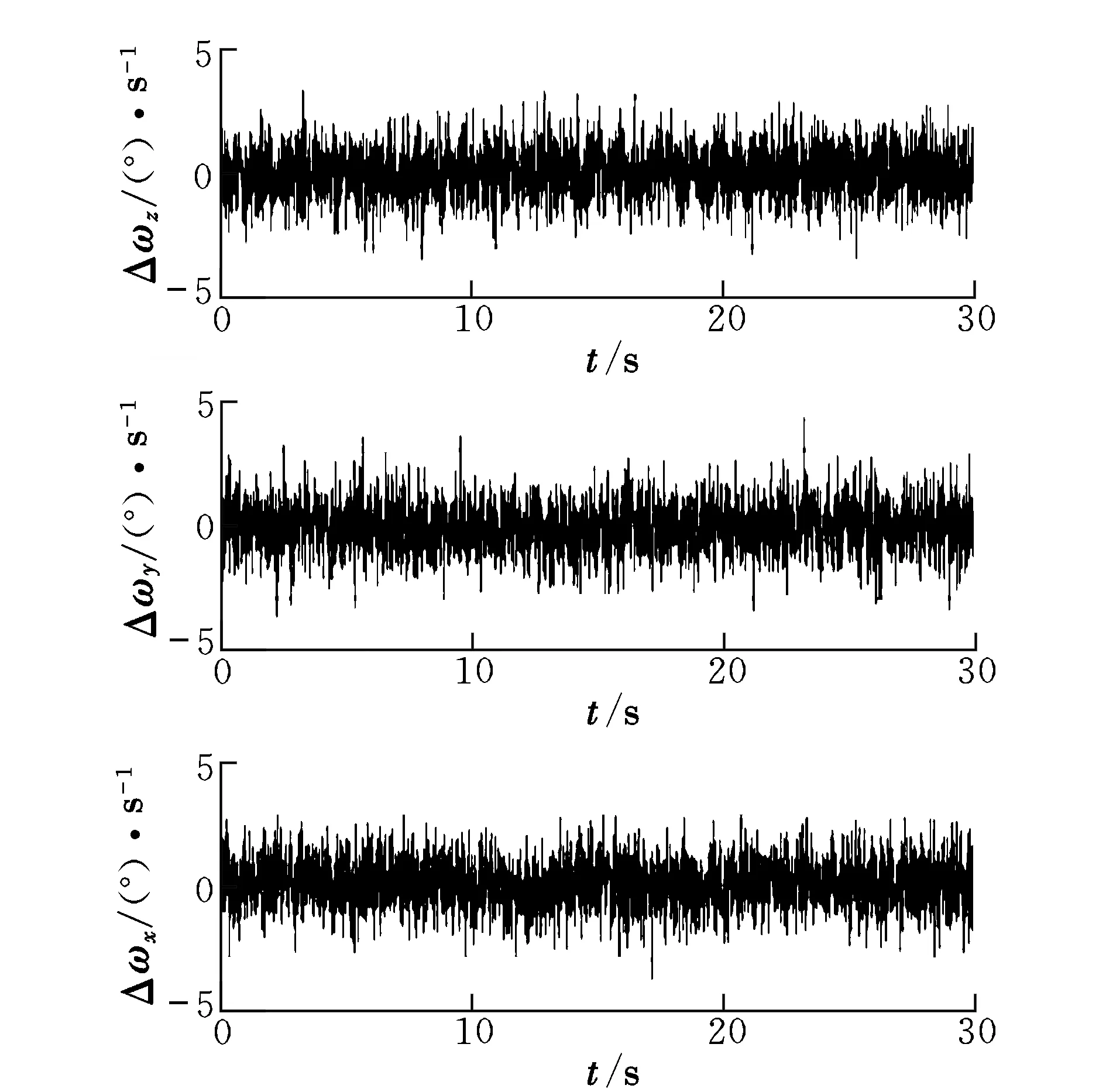
圖3 角速度測(cè)量誤差Fig.3 Measurement error of angular rate
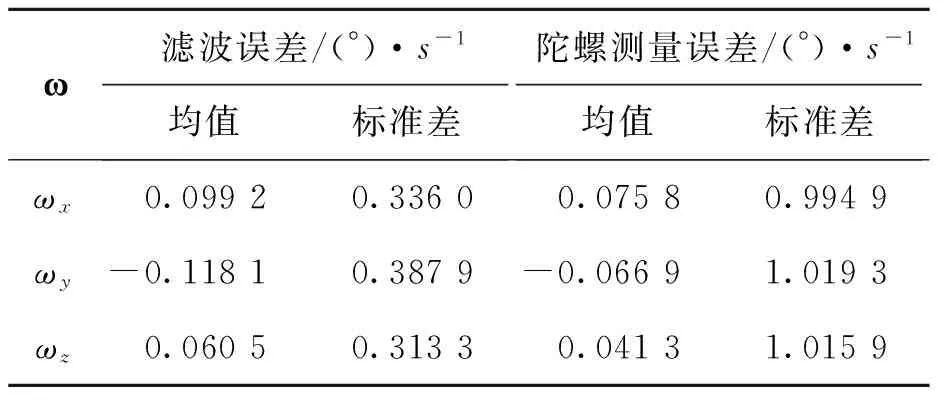
ω濾波誤差/(°)·s-1均值標(biāo)準(zhǔn)差陀螺測(cè)量誤差/(°)·s-1均值標(biāo)準(zhǔn)差ωx0.09920.33600.07580.9949ωy-0.1181 0.3879-0.0669 1.0193ωz0.06050.31330.04131.0159
由圖1可以看出,濾波估計(jì)值可以準(zhǔn)確地跟蹤真實(shí)狀態(tài)。從圖2~圖3和表1可以看出,應(yīng)用動(dòng)力學(xué)輔助濾波后,三軸角速度的誤差均方差減小到原始測(cè)量誤差均方差的30%左右,誤差均值略有增大。這表明引入動(dòng)力學(xué)濾波系統(tǒng)后對(duì)陀螺的噪聲產(chǎn)生了明顯的抑制效果。
從圖4中可以看出,濾波過(guò)程中迎角和側(cè)滑角的估計(jì)誤差非常小,則該濾波器同樣可以用來(lái)估計(jì)迎角和側(cè)滑角。
4結(jié)束語(yǔ)
針對(duì)低精度的速率陀螺,本文設(shè)計(jì)了一種通過(guò)使用彈體姿態(tài)動(dòng)力學(xué)模型和非線性濾波卡爾曼濾波器對(duì)陀螺數(shù)據(jù)進(jìn)行修正的方法。通過(guò)半實(shí)物仿真測(cè)試表明,該方法可以非常有效地減小陀螺的高頻測(cè)量噪聲,具有一定的工程應(yīng)用價(jià)值。基于動(dòng)力學(xué)信息的卡爾曼濾波器在一定程度上可以看成是時(shí)間常數(shù)自適應(yīng)調(diào)節(jié)的低通濾波器,相比于傳統(tǒng)的一階低通濾波器,具有相位延遲小的明顯優(yōu)勢(shì)。
參考文獻(xiàn):
[1]蒙濤,王昊,李輝,等.MEMS陀螺誤差建模與濾波方法
[J].系統(tǒng)工程與電子技術(shù),2009,31(8):1944-1948.
[2]李杰,曲云,劉俊,等.模平方小波閾值在MEMS陀螺信號(hào)降噪中的應(yīng)用[J].中國(guó)慣性技術(shù)學(xué)報(bào),2008,16(2):236-239.
[3]KoifmanM,BarItzhackIY.Inertialnavigationsystemaidedbyaircraftdynamics[J].IEEETransactionsonControlSystemsTechnology,1999,7(4):487-493.
[4]MorgadoM,OliveiraP,SilvestreC,etal.EmbeddedvehicledynamicsaidingforUSBL/INSunderwaternavigationsystem[J].IEEETransactionsonControlSystemsTechnology,2014,22(1):322-330.
[5]WangJH,GaoY.Landvehicledynamics-aidedinertialnavigation[J].IEEETransactionsonAerospaceandElectronicSystems,2010,46(4):1638-1652.
[6]李新國(guó),方群.有翼導(dǎo)彈飛行動(dòng)力學(xué)[M].西安:西北工業(yè)大學(xué)出版社,2008:9-18.
[7]HermannR,KrenerAJ.Nonlinearcontrolabilityandobservability[J].IEEETransactionsonAutomaticControl,1977,22(5):728-740.
[8]常曉華,崔平遠(yuǎn),崔祜濤.一種深空自主導(dǎo)航系統(tǒng)可觀測(cè)性分析方法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2010,42(11):1681-1685.
[9]PereraLDL,MelkumyanA,NettletonE.OnthelinearandnonlinearobservabilityanalysisoftheSLAMproblem[C]//IEEEInternationalConferenceonMechatronics.Malaga,Spain:IEEE,2009:279-284.
(編輯:李怡)
Filtering of rate gyroscope based on missile dynamics information
CHEN Hong-ying1, LUO Wen-tian2
(1.Flight Technology College, CAFUC, Guanghan 618307, China;2.Aeronautical Engineering College, CAFUC, Guanghan 618307, China)
Abstract:For the low accuracy and high noise problem of the rate gyroscope of tactical guidance weapon’s using the low precision inertial component, a denoising method based on missile dynamics information was presented. The method combined missile attitude dynamics equation with extended Kalman filter algorithm to build the filter. The gyroscope’s output were corrected in real-time by the data of prior information of missile and measured information of actuator during flight. The nonlinear filtering system is proved to be local observable and efficient. Simulation results show that the method could reduce the measure error of the rate gyroscope effectively.
Key words:rate gyroscope;missile dynamics;extended Kalman filter;local observables;semi-physical simulation
收稿日期:2015-11-11;
修訂日期:2016-01-15; 網(wǎng)絡(luò)出版時(shí)間:2016-02-29 16:37
作者簡(jiǎn)介:陳紅英(1976-),女,四川德陽(yáng)人,副教授,研究方向?yàn)轱w行力學(xué)與飛行仿真。
中圖分類號(hào):TJ765
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1002-0853(2016)03-0053-05