基于虛擬電子主軸的雙電機同步控制研究
2016-07-15 08:13:26王少軍
裝備制造技術 2016年3期
陳 凌,王少軍,范 維,盧 紅
(1.武漢理工大學機電工程學院,湖北 武漢430070;2.東南密蘇里州立大學,美國 開普吉拉多MO63701)
?
基于虛擬電子主軸的雙電機同步控制研究
陳凌1,王少軍2,范維1,盧紅1
(1.武漢理工大學機電工程學院,湖北 武漢430070;2.東南密蘇里州立大學,美國 開普吉拉多MO63701)
摘要:為了解決雙驅同步進給系統中雙電機的同步控制的問題,實現精確同步控制,提出虛擬電子主軸+改進的魯棒內環PID的雙電機同步控制方法。建立感應電機數學模型,分析雙電機同步控制的的基本控制策略,針對所選倍福運動控制系統建立虛擬電子主軸+改進的魯棒內環PID同步控制算法及參數整定,通過建立仿真模型,比較三種控制策略。對同步誤差和跟隨性能分析表明,采用虛擬電子主軸+改進的魯棒內環PID控制方法,具有響應速度快、抗干擾能力強、雙軸同步精度高等優點。
關鍵詞:雙電機驅動;同步控制;虛擬主軸控制;魯棒內環PID
隨著高端裝備制造業的不斷發展,工業領域中單臺電機配合絲杠和齒輪等傳動機構驅動的方案已經不能滿足現代制造業性能、質量的要求。近年來,采用雙電機與滾珠絲桿構成的雙電機同步進給系統,由于其較高的系統剛性、加工精準度、穩定性等優點,受到了廣泛應用。
雙電機同步控制作為控制技術中一個重要分支,不僅對單個控制電機的控制精度提出要求,也要求兩個軸之間的同步性協調控制。早期日本的Nakamura等針對兩自由度機械手位置同步問題,提出的“主從雙模同步控制”技術[1]。Lorenz提出的主從控制技術,有控制結構簡單,控制的形式多樣等優點[2]。Koren提出的交叉耦合控制[3],其作為一種改進的并聯結構形式,具有較好的軸間同步性能,在雙軸同步控制中應用廣泛。由于雙驅同步系統具有的復雜機械耦合關系,在運行過程中受到的擾動,負載變化等將會導致兩個電機運動的不同步,從而導致了系統的加工精度降低,甚至損壞工作臺。因此雙電機同步技術的研究具有重大的現實意義。本文圍繞雙電機同步進給系統,針對系統中雙電機同步的精度要求,提出虛擬電子主軸+改進的魯棒內環的雙驅同步控制方法,通過Matlab軟件進行模擬仿真,得到驗證。
1 感應電機的數學模型
考慮到低轉速和負載沖擊的場合中能夠滿足系統高精確度的要求,本文采用了永磁同步電機進行數學模型的建立[4],圖1所示
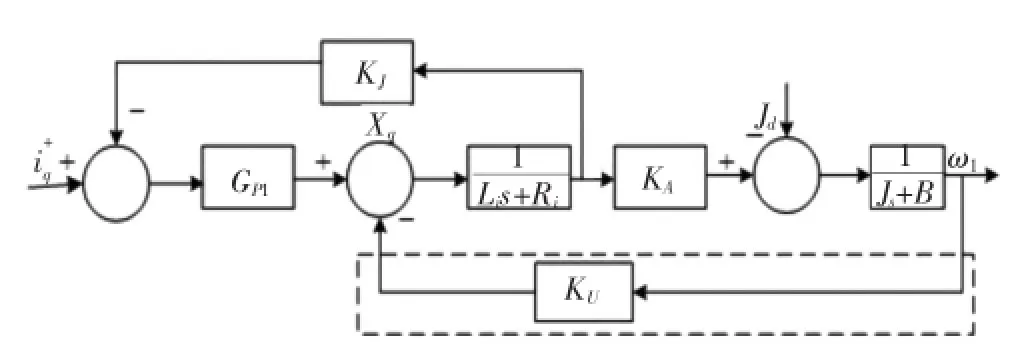
圖1 PMSM電機伺服框圖
以Xq為輸入,ω1為輸出時,電機傳遞函數G1(s)如下:

其中:
KA為轉矩系數;
KU為感應電動勢系數;
J1為轉子和負載總轉動慣量;
R1為dq坐標系上定子繞組電阻;
Li為電樞電感。
2 雙電機同步控制器設計
為了提高雙電機同步控制性能,需要提高單電機自身跟蹤精度,消減雙電機之間的進給位移同步誤差,對雙電機同步控制的策略和結構進行設計,目前同步控制策略主要有并聯同步、主從同步、交叉耦合和虛擬電子主軸同步控制策略幾種。
虛擬主軸控制法基本原理是通過在主動軸與從動軸之間代入一個耦合力矩模塊,任何一個從動軸的運動狀態的變化都會通過虛擬扭轉力矩反饋到主軸控制器的前端通道上,從而影響其他軸的運行,使得系統具有良好的同步性[5]。虛擬電子主軸同步控制方式在同步性和越階響應上要優于并聯同步控制方式,與主從同步控制策略相比較,實軸滯后小[6],且系統抗干擾能力和魯棒性強于交叉耦合同步控制方式。
通過單軸改進的魯棒內環PID控制器的控制結構,結合虛擬電子主軸同步控制策略,在雙電機同步控制器Kd的基礎上,增加虛擬電子主軸模型,可以在保證單電機的跟蹤精度和響應特性的同時,提高雙電機同步控制的穩態和動態性能。單軸魯棒內環PID控制器Ks是提高單電機控制跟隨性能和響應特性的關鍵,對電機驅動的干擾信號進行抑制。對于本文所搭建雙驅同步控制系統,在驅動控制水平對伺服電機進行運動控制,永磁同步電機與絲杠系統構成的是二階伺服電機系統,單電機控制器的設計要求是在高阻特性的基礎上對低頻干擾進行抑制。最終設計的虛擬電子主軸+改進的魯棒內環PID的雙驅同步控制方法結構圖2所示。
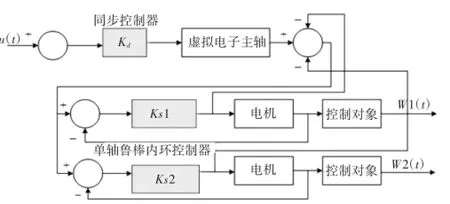
圖2 雙電機虛擬電子主軸同步控制方式結構
3 雙電機同步控制建模仿真
采用本文設計的控制方式對該雙電機同步控制系統數學模型進行雙電機同步控制建模,其Simulink模型及階躍響應仿真結果如圖3所示。
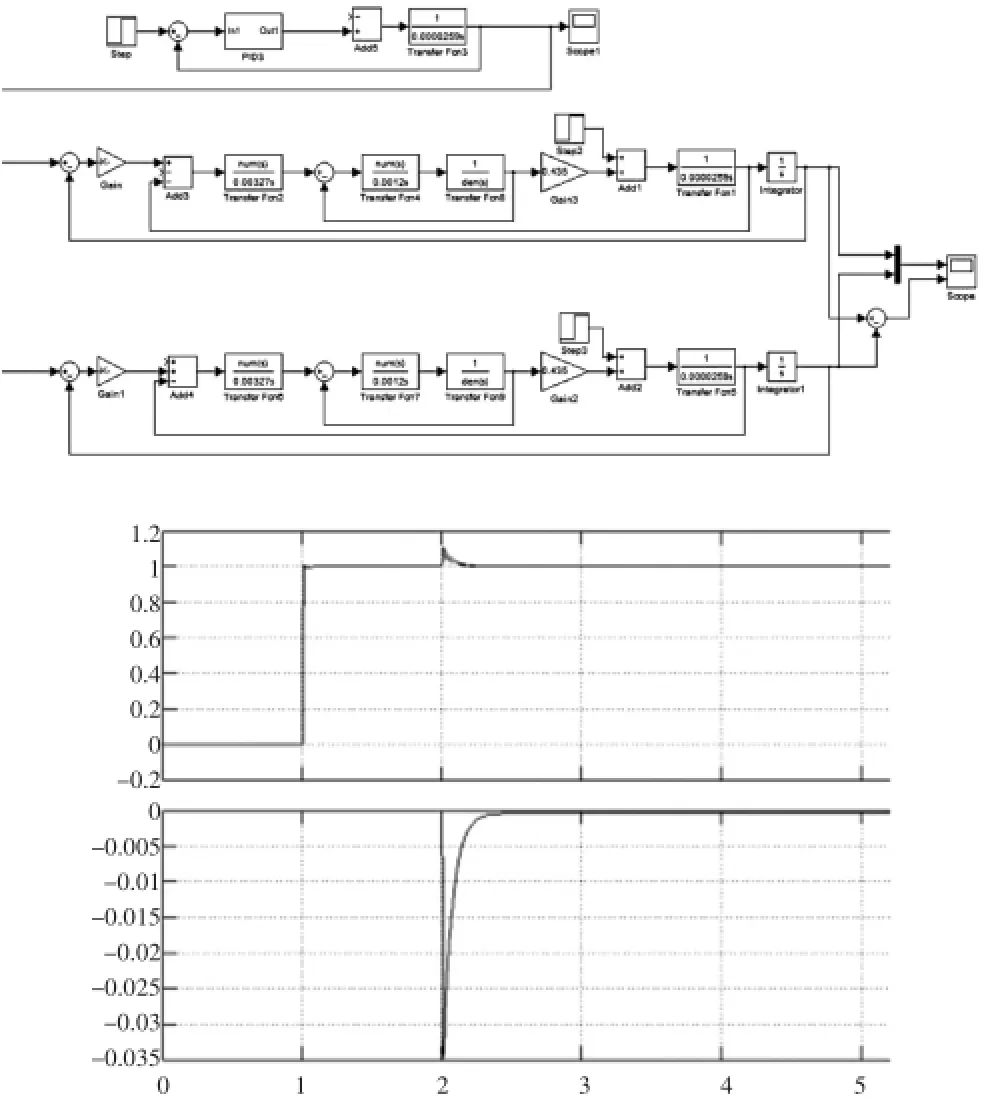
圖3 虛擬電子主軸+改進魯棒內環PID仿真模型階躍響應仿真結果
為了驗證本文提出采用虛擬電子主軸+改進的魯棒內環PID的控制方法在雙電機同步控制系統中的響應速度快、抗干擾能力強、雙軸同步精度高等優點,基于上文所建立永磁同步電機數學模型,結合虛擬電子主軸、并聯、主從三種同步控制策略與PID控制進行雙電機同步控制建模仿真,對比三種控制策略和算法在階躍響應下的超調量和響應時間,采用干擾信號模擬負載擾動,分析三種控制策略和算法的抗干擾能力,以此驗證所提出虛擬電子主軸+改進的魯棒內環PID控制的跟蹤精度和同步性能。
通過對比主從同步控制系統的階躍響應仿真結果如表1所列,可以看出采用虛擬電子主軸+改進的魯棒內環PID控制超調量小,在主從軸之間產生不同干擾時,主從同步控制中從軸的位置跟蹤相比主軸有了明顯的滯后,而虛擬電子主軸控制策略雙軸響應速度更快。而并聯同步控制系統的階躍響應仿真結果表明在雙軸產生不同干擾時,雙軸之間由于沒有任何聯系,同步誤差較大,而虛擬電子主軸+改進的魯棒內環PID控制位置跟蹤精度更高,同步性能好。
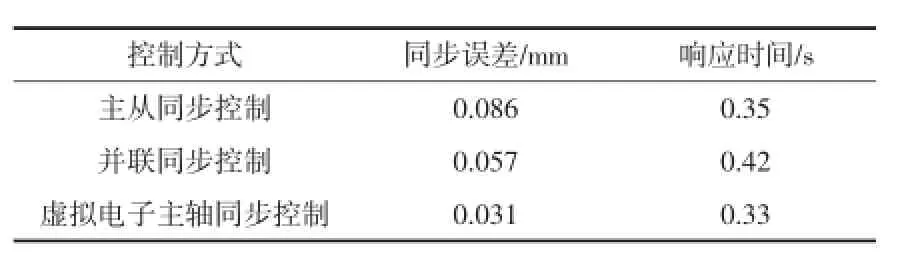
表1 三種控制方式仿真結果
4 結束語
本文基于倍福運動控制系統,采用了虛擬電子主軸+改進的魯棒內環PID同步控制方法,通過建立模型以及仿真實驗,將虛擬電子主軸+改進的魯棒內環PID同步控制方法與主從同步控制和并聯同步控制進行比較分析。仿真結果表明采用虛擬電子主軸+改進的魯棒內環PID同步控制具有穩態精度好、受干擾動態性好、魯棒性強等優勢。
參考文獻:
[1]Nakamura M,Yamanaka S.Dual Mode Synchronous Positioning with Switching of Master Slave Axes by Using a Torque Signal for Contour Control of Articulated Robot Arms[J].Electrical Engi neering in Japan,Vol.138,NO.2,2002 Translated from Denki Gakkai Ronbunshi,Vol.121-C,NO.1,January2001,pp.82.89.
[2]R.D.Lorenz and P.B.Schlnidt,“Synehronized Motion Control for process Automation”[C].IEEE Conference on Industry Appli cations Soeiety Annual Meeting,PP.1693-1698vol.2,l-5 Oct. 1989.
[3]Koren Y,Cross-coupled biaxial computer control for manu faeturing systems[J].ASME,Journal of Dynamic Systems,Measurement and Control,1980,102(4):265-272.
[4]李琳.數控機床交流伺服控制系統的設計與仿真[D].宜昌:三峽大學碩士學位論文,2006.
[5]李曉明.基于虛軸法的高速液壓同步控制策略研究[J].液壓與氣動,2008,(11):33-36.
[6]肖亮亮.基于虛軸法的多軸同步運動控制系統設計[D].杭州:浙江理工大學碩士學位論文,2010.
Research on Dual-Motor Synchronous Control based on Electronic Virtual Line-shafting
CHEN Ling1,WANG Shao-jun2,FAN Wei1,LU Hong1
(1.School of Mechanical and Electrical Engineering,Wuhan University of Technology,Wuhan 430070,China;2.Southeast Missouri State University,Cape Girardeau MO 63701,USA)
Abstract:In order to solve the problems of dual-motor asynchrony in dual-drive synchronization feed system,and achieve precise synchronization control,The method of electronic virtual line-shafting+improved Robust internal loop PID for Dual-Motor Synchronous Control is proposed in this paper.Established the mathematical model of motor,discussed the dual-drive basic synchronization control strategies.Constructed the electronic virtual lineshafting+improved Robust internal loop PID synchronous control algorithm and parameter setting based on Beckhoff motion control system selected in the paper.By the established of simulation models,compared three kinds of synchronous control method.Analyzed the synchronous error and following performance indicated that the method of electronic virtual line-shafting+improved Robust internal loop PID have the advantages of faster response speed,stonger Anti-interference,higher synchronization precision.
Key words:dual-motor;synchronous control;electronic virtual line-shafting;Robust internal loop PID
中圖分類號:TP275
文獻標識碼:A
文章編號:1672-545X(2016)03-0009-03
收稿日期:2015-12-26
基金項目:湖北省自然科學基金(編號:2014CFB184),武漢市科技攻關計劃(編號:No2014 01010101010010),中央高校基本科研業務費專項資金資助(編號:NO.2014-zy-066)。
作者簡介:陳凌(1989-),男,福建寧德人,在讀碩士研究生,研究方向:先進制造工藝與裝備;王少軍(1957-),男,博士,博士生導師,美國東南密蘇里州立大學工業與工程技術系任教;范維(1987-),男,湖北荊州人,博士,研究方向:數字制造科學。盧紅(1965-),女,湖北黃岡人,博士,教授,博士生導師,研究方向:先進制造工藝與裝備。