三線陣衛星影像無控測圖立體模型選擇方法
2016-07-18 09:30:02謝國華
甘肅科技 2016年7期
謝國華
(61243部隊,新疆 烏魯木齊830006)
?
三線陣衛星影像無控測圖立體模型選擇方法
謝國華
(61243部隊,新疆 烏魯木齊830006)
摘要:三線陣衛星測繪系統能夠同時獲取前視、下視和后視三個視角影像,可兩兩組合成立體像對,為組建立體模型提供了多種選擇。為了選擇更合適的立體模型,本論述對單模型之間、單模型與區域網整體平差同名特征點及模型連接點的偏差進行了試驗分析。試驗表明:前后視立體像對測圖精度相對其他類別像對來講,整體偏差及模型間接邊偏差都較小,觀測盲區也較小,在不考慮視差對測圖人員影響的情況下,可優先選擇前后視立體模型測圖。
關鍵詞:三線陣衛星測繪;無控測圖;立體模型
1 概述
隨著遙感技術和空間技術的不斷發展,衛星攝影測量已經成為人類獲取地球空間信息的重要手段之一,在國民經濟和國防建設中發揮著重要作用。利用三線陣CCD立體測繪相機所獲取的立體影像及其姿態、軌道位置以及其他信息,可以在無地面控制點條件下測制地球等星球表面的地形圖[1],從而有效的減弱了在沙漠、海洋、境外等困難地區獲取地理信息對地面控制點的依賴。
在利用衛星影像進行測繪時,在保證衛星軌道定位精度、衛星姿態確定精度、時間同步精度和相機內方位元素的精度標定的前提下,所獲得的衛星影像及位置姿態數據為后工序作業提供保證。測繪衛星發射后,由于受外界因素的影響,使傳感器的內部結構產生細微的變化,直接影響內方位元素精度;在衛星定位過程中,星敏陀螺等測量設備的測量誤差也對最終的定位結果產生影響[2,3]。因此,為得到滿足精度要求的測繪成果,需要采用區域網平差方法來解算內外方位元素誤差,以消除其對衛星定位的影響[4]。同時,空中三角測量作為內業測圖的第一道工序,是測圖的數學基礎,也要保證其精度滿足相應的技術指標[5]。在完成空三作業后進行立體測圖時,三線陣立體測圖衛星能夠同時獲取同一區域三個不同視角的立體模型,由于不同立體模型視角不同,模型間同名點的位置及高程也不完全相同,選擇合適的立體模型不僅能夠減小觀測盲區,還能夠提高測繪成果的相對精度。本論述針對以上問題,以國產某型號三線陣立體測繪衛星系統同時獲取的某測區前視、后視、下視及同軌、異軌影像及系統參數為基礎資料,通過對比分析不同模型同名特征點坐標偏移量的試驗,提出了選擇立體模型測圖的方法。
2 方法與試驗
本研究試驗數據資料主要為國產某型號測繪衛星2014-04獲取并經過幾何和輻射校正的某高山區全色立體像對及其對應無控制點加密數據。地圖成圖采用2000中國大地坐標系和1985國家高程基準,比例尺為1:50000[6]。
2.1三線陣影像內部同名點坐標比對
利用三線陣影像原始RPC參數,恢復立體模型。在42個模型的四角和中心位置分別選取1個特征點,共選取210個特征點。分別量測這些特征點在前后、前下、后下三個立體像對上的坐標,得到同一特征點在不同模型中的三組坐標,再對三組坐標的X、Y、Z值兩兩比對,得出三線陣影像內部立體像對同名點的偏差情況[7]。
假設前后視模型下測量值為真值,通過觀測,求得前后視和前下視各組同名特征點平均誤差在X、Y、Z方向的最大值分別為-5.17m、6.51m、-5.33m,各組特征點中誤差在X、Y、Z方向的最大值分別為10.44m、11.7m、8.75m。詳細統計情況見表1。

表1 前后視與前下視比較結果統計表 單位:個
假設前后視模型下測量值為真值,通過觀測,求得前后視和后下視各組同名特征點平均誤差在X、Y、Z方向的最大值分別為-5.32m、-5.22m、-5.04m,各組特征點中誤差在X、Y、Z方向的最大值分別為10.20m、11.38m、7.78m。詳細統計情況見表2。
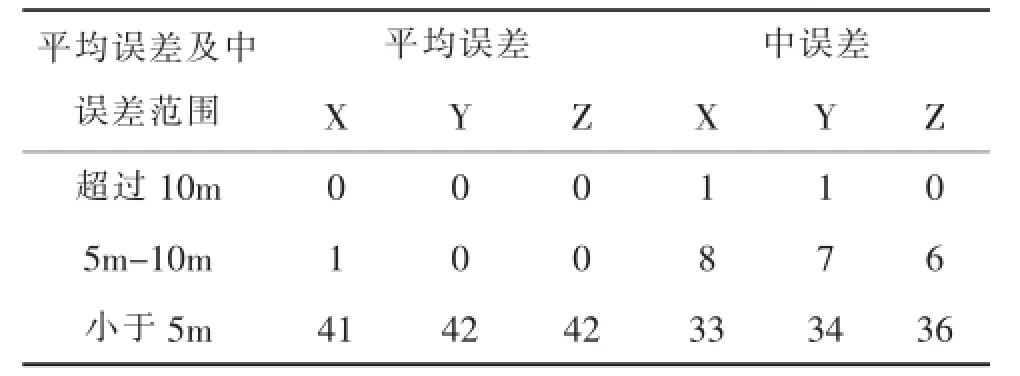
表2 前后視與后下視比較結果統計表 單位:個
假設前下視模型下測量值為真值,通過前下視與后下視比較,各組同名特征點平均誤差在X、Y、Z方向最大值分別為-10.45m、-6.38m、-7.14m,各組特征點中誤差在 X、Y、Z方向的最大值分別為12.10m、13.08m、8.76m。詳細統計情況見表3。
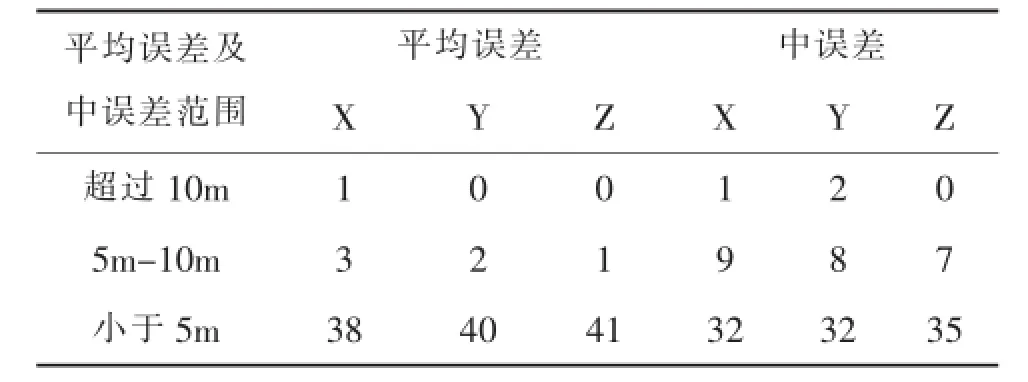
表3 前下視與后下視比較結果統計表 單位:個
2.2單模型與區域網整體平差后同名特征點坐標比對
以景為單位對三線陣影像單獨建立工程,創建立體模型。在42個模型的四角和中心位置分別選取1個特征點并量測這些特征點在前后視、下后視、前下視三種立體像對中的坐標,再分別與區域網整體平差后模型中同名特征點的坐標進行比對。
假設區域網整體平差值為真值,通過比對,前下視、后下視像對中均有2個特征點X值超過10m、1個特征點Y值超過10m,前后視像對中特征點坐標值均未超過10m。單模型特征點組平均誤差在X、Y、Z方向最大值分別為-11.29m、-15.54m、-13.81m,同名特征點組中誤差在X、Y、Z方向最大值分別為4.26m、3.35m,3.62m。單模型與區域網整體平差比對示例見表4。
2.3測區公共模型連接點坐標比對
區域網整體平差完成后,在前后視、前下視、后下視3個類型像對上選取了210個連接點作為特征點,分別量取坐標值,與區域網整體平差后的模型進行比較,評判測區模型間接邊偏差情況。假設區域網整體平差模型特征點坐標值為真值,經檢測,測區公共模型連接點平均誤差在X、Y、Z方向最大值分別為6.88m、5.48m、8.40m,連接點中誤差在X、Y、Z方向最大值分別為10.87m、9.21m、12.43m。比對統計示例見表5。
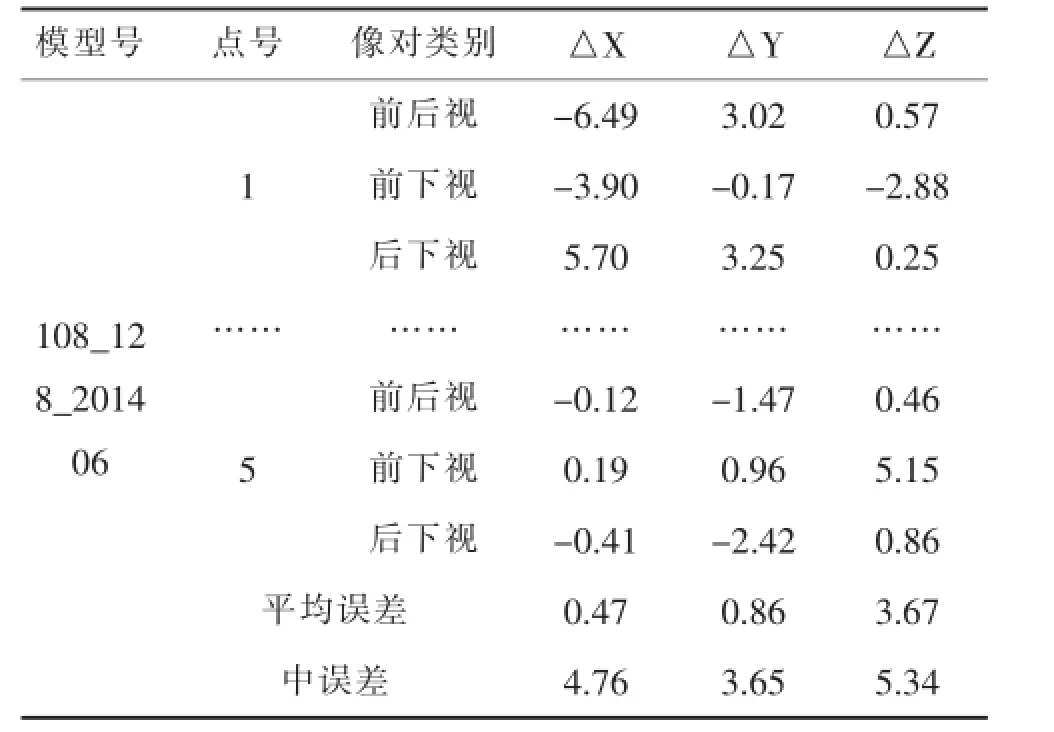
表4 單模型與區域網整體平差后比較結果統計表單位:m
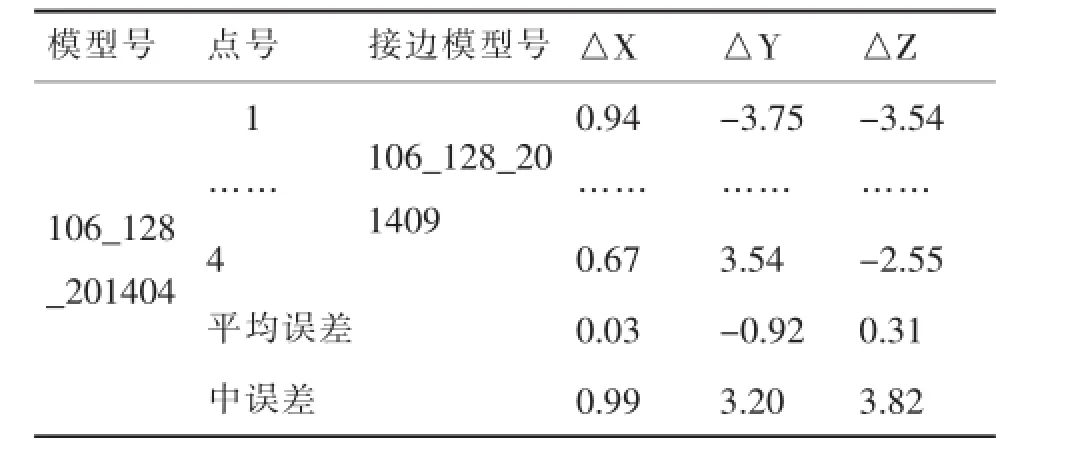
表5 公共模型特征點與前后視模型比較結果統計表 單位:m
3 結論
通過上述試驗初步認為,本試驗中原始三線陣影像內部精度基本一致,區域網整體平差后與原始立體模型精度一致,模型間接邊相對中誤差也滿足1:50000地形圖接邊要求。前后視立體像對測圖精度相對前下視、后下視像對來講,整體偏差及模型間接邊偏差都較小,同時能夠減小觀測盲區。因此在有多個立體像對可供使用的前提下,不考慮視差對測圖人員造成的影響,可優先選擇前后視立體模型測圖。利用衛星影像進行無控制測圖比較復雜,本論述只針對國產某型號三線陣衛星測繪系統對山地1:50000地形圖測繪進行了粗淺的試驗和數據分析,也沒有野外檢查點進行精度評估,為了得到可靠全面結論,還需對利用不同型號三線陣立體測繪衛星測繪不同困難類別、不同比例尺地形圖等做全面的試驗和評估。
參考文獻:
[1]胡莘,曹喜濱.三線陣立體測繪衛星的測繪精度分析[J].哈爾濱工業大學學報,2008,40(5)695-699.
[2]唐新明,周平,張過,等.資源三號測繪衛星傳感器校正產品生產方法研究[J].武漢大學學報:信息科學版,2014,39(3):287-294.
[3]王任享.三線陣CCD影像衛星攝影測量原理[M].北京,測繪出版社,2006.8.
[4]劉楚斌,張永生,范大昭,雷蓉.高分辨率三線陣衛星遙感影像的區域網平差算法與試驗[J].測繪科學技術學報,2015,32(5):89-93.
[5]高文革,范永杰,宋倩,等.空三加密在數字攝影測量中的精度分析[J].山東國土資源,2010,26(12):26-29,33.
[6]GBT12340-2008地形圖航空攝影測量內業規范 1: 250001:500001:100000[S].北京:測繪出版社,2008.
[7]GBT23236-2009數字航空攝影測量空中三角測量規范[S].北京:中國標準出版社,2009.
中圖分類號:P236
