AOD爐濺渣護爐氮氣流量模糊自適應PID控制
2016-07-19 01:16:06徐成勝王宏志
長春工業大學學報 2016年3期
徐成勝, 邱 東, 王宏志
(1.長春工業大學 電氣與電子工程學院, 吉林 長春 130012;2.長春工業大學 計算機科學與工程學院, 吉林 長春 130012)
?
AOD爐濺渣護爐氮氣流量模糊自適應PID控制
徐成勝1,邱東1,王宏志2
(1.長春工業大學 電氣與電子工程學院, 吉林 長春130012;2.長春工業大學 計算機科學與工程學院, 吉林 長春130012)
摘要:針對AOD爐濺渣護爐氮氣流量控制系統中氮氣流量復雜變化、非線性、時變性等問題,研究了模糊規律并應用于PID控制器。MATLAB仿真結果表明,系統具有良好的動態、靜態性能。
關鍵詞:模糊自適應;PID; 流量控制
0引言
常規PID控制具有高可靠性、算法簡單、魯棒性好等特點,而且是最早發展起來并在工業控制中普遍使用的控制策略。常規PID參數整定比較復雜,對于線性系統還能有效的控制,但是對于非線性系統的控制卻表現不佳[1-3]。文中控制對象是AOD爐濺渣護爐中氮氣流量系統,在AOD爐濺渣護爐工藝中,利用氧槍高速射出的氮氣流對爐子底部留渣進行噴吹,濺起的爐渣分布在AOD的爐襯上,起到保護爐襯的作用。氮氣流量是由氣體流量閥門直接控制的,但是即使閥門開度相同,在很多時候氮氣流量的大小也不盡相同,因為其流量還與儲氣罐壓力(氮氣壓力)和溫度等外界因素密切相關。由此看來本系統是典型的非線性系統,所以常規的PID控制器不能達到系統對氮氣流量精度和穩定性的要求。系統采用模糊自適應PID控制器[4],其具體的控制原理如下:首先結合實際系統運行過程中的調節經驗制定模糊知識庫,根據模糊知識庫轉化成模糊規則;其次將模糊規則添加到PID控制中,實現PID控制器參數的在線調整。使用模糊自適應PID控制器對氮氣流量系統做到很好的控制,其控制精度及系統在遇到擾動時候的調節時間,還有動態、靜態性能都有很好的改善。
1AOD爐濺渣護爐工藝與氮氣流量控制
1.1AOD爐濺渣護爐工藝
AOD爐即氬氧精煉爐是在鐵合金生產領域中新興的一種生產工藝。濺渣護爐工藝是提高AOD爐爐齡的重要方法之一,其操作方法簡單,能耗低,生產過程安全已經被廣泛地應用在冶金行業中。具體操作方法是:在冶煉過程出鋼以后,首先在爐底預留一部分爐渣,必要時向其中加入相應的調渣劑,將爐渣調整到合適的粘度;其次將氧槍的高度調整到合適的位置,氧槍接到氮氣的氣源上,氮氣以高速射流的方式噴出,這時爐底的爐渣被高速的氮氣流濺起噴涂在AOD爐的內壁上[5]。當下次進行冶煉時,厚厚的濺渣層把爐襯和高溫鐵水隔離開來起到了保護爐襯、延長爐役的作用。
1.2氮氣流量控制原理
對于氣體流量的控制有兩種比較常見的方法:一種是改變氣體在管道的壓力;另一種通過對管道的橫流面積的改變來實現[6]。在本系統中采取第二種方法。橫流面的改變通過閥門的開度來控制,閥門的開度又和控制器電壓和電流有關系。具體控制原理如圖1所示。

圖1 氮氣流量控制原理
2常規PID控制器
2.1常規PID控制器原理
常規PID控制器控制規律如下:
(1)
式中:e(k)----系統偏差;
ec(k)----系統偏差率;
Kp----比例系數,能夠提升系統調節精度,加快響應速度;
Ki----積分系數,能夠使系統的穩態誤差減小;
Kd----微分系數,能夠使系統的動態性能得到改善。
2.2常規PID控制原理圖
常規PID控制原理圖如圖2所示。

圖2常規PID控制原理圖
為了追求更好的控制效果,人們從未停止對控制器的研究開發,但是由于PID控制器結構簡單,參數整定法理論成熟、設計穩定、使用方便、適用對象廣等優點,而且在工程應用中積累了大量的經驗,所以在控制系統中仍然應用廣泛。
3模糊自適應PID控制器
模糊自適應PID控制器利用模糊控制規則對常規PID參數進行在線修改,其輸入量是誤差e和誤差變化ec,輸出量是經過整定的PID控制器參數。針對不同的干擾得到不同的參數整定值。整定后的參數能夠很好地控制系統,靜態性能和動態性能也得到相應的提高。控制原理如圖3所示。

圖3控制原理圖
3個參數的確定主要分以下幾步:
1)通過采用Ziegler-Nichols參數預整法得到初值kp、ki、kd[2]。
2)隨著系統的運行,流量向設定值逼近,此時根據圖2中的模糊推理和參數修正得出比例系數、積分系數、微分系數的變化量Δkp、Δkd、Δki,從而計算3個參數修正后的值。
(2)
4模糊自適應PID控制器設計
4.1模糊語言變量和隸屬度函數
系統采用二維模糊控制器,在模糊PID調節過程中,氮氣流量能夠迅速達到設定值,系統動態穩定性也表現的很好。該氮氣流量控制系統的輸入量分別為e和ec,輸出量為3個控制參數,分別為Kp、Ki、Kd的整定值。根據不同工況調整PID控制器的控制參數,這樣實現較為容易,控制效果也能達標。
e基本論域為[-200,200],ec的基本論域為[ -50,50],e和ec的模糊子集為E/EC={NB,NS,ZO,PS,PB},分別代表負大,負小,零,正小,正大。e和ec量化論域設置為[-4,+4],采用三角形函數作為隸屬度函數[2]。
輸出變量Kp的基本論域為[0,5],Ki的基本論域為[0,1],Kd的基本論域為[0,10]。對應選取Kp、Ki、Kd的模糊子集為KP/KI/KD={NB,NS,ZO,PS,PB},量化論域也設置為[-4,+4],隸屬度函數采用三角函數。
4.2建立模糊控制規則和求模糊控制規則表
在氮氣流量控制系統中,根據控制參數Kp、Ki、Kd對系統輸出特性的影響情況,得到在不同的e和ec時,參數的自整定原則,從而可以制定出5×5×3=75條模糊控制規則,采用IF-THEN的形式如下:
IFE=NBandEC=NBTHENKP=PB
IFE=NBandEC=NBTHENKI=NB
…
IFE=PBandEC=PBTHENKD=PS
根據這些模糊控制規則建立模糊控制規則表,得到Kp、Ki、Kd,3個參數分別整定的模糊控制表見表1。
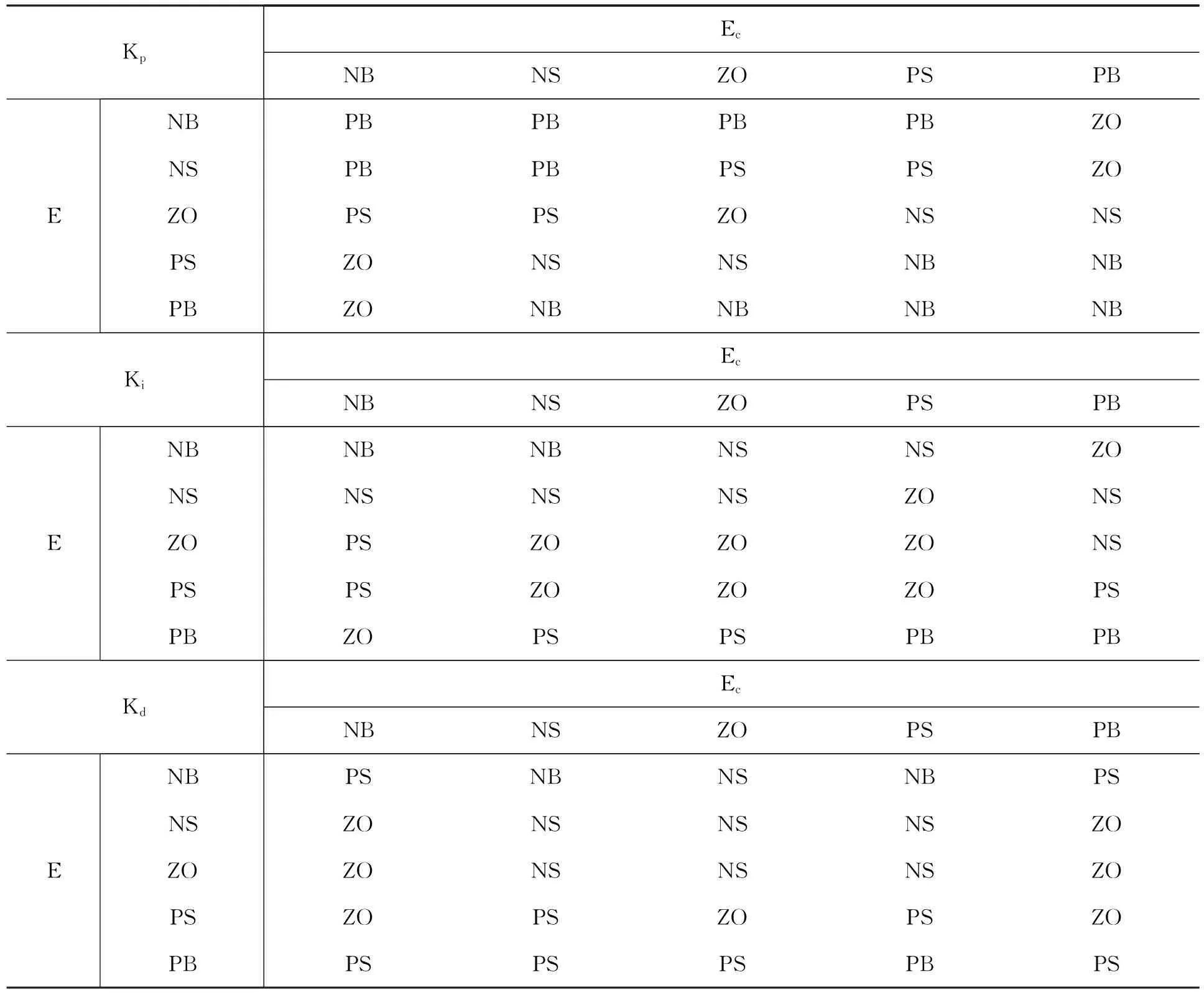
表1 模糊控制表
4.3解模糊
把語言表達的模糊量轉化成精確的調整量就是解模糊,其輸出值的確定依據模糊子集的隸屬度計算結果。先根據某個時刻的e、ec值和隸屬度函數曲線得到它們的隸屬度,再依據模糊控制規則進行推理計算得出Kp、Ki、Kd各語言值對應隸屬度,最后一步是采用重心法精確計算出Kp、Ki、Kd的改變量Δkp、Δki、Δkd,代入式(2)得到kp、ki、kd的精確調整值[7]。
5系統仿真與分析
采用MATLAB中的Sumlink仿真工具及模糊控制工具箱(Fuzzy Contorl Toolbox)進行仿真分析。系統的傳遞函數可表示如下:
(3)
式中:Kv----調節閥的流量特性常數;
Tv----調節閥的時間系數。
根據該系統的特性Kv取14.8,Tv取4s。時間系數τ取2s,代入式(3):
(4)
首先采用Ziegler-Nichols參數整定法在線設計常規PID控制器,這樣能保證PID閉環控制系統穩定。然后根據模糊控制規則,在線調整控制參數。
常規PID控制器參數為:
Kp=1.49,Ki=0.018,Kd=0.5。
模糊自適應PID中,初始的PID參數為:
Kp=1.49,Ki=0.018,Kd=0.5。
仿真原理如圖4所示。

圖4系統仿真原理圖
系統仿真圖如圖5所示。
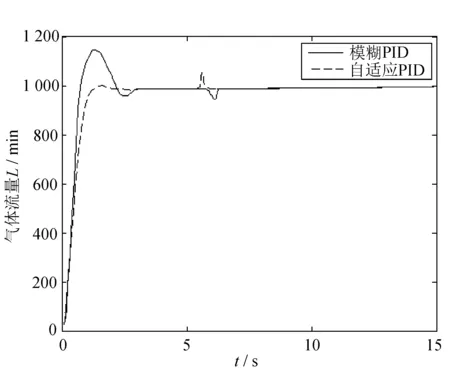
圖5 系統仿真圖
從圖中可以看出,模糊PID和自適應PID響應曲線對比結果,模糊自適應PID控制器相對于常規PID控制器有很好的非線性逼近能力和自調整性能。模糊自適應PID控制是在常規PID控制上增加了Kp、Ki、Kd的在線調整,經過調整后的比例、積分、微分系數對系統響應速度明顯加快,超調顯著減小。當外界因素對系統產生干擾時,本系統能迅速對PID參數進行在線調整,抑制突發的系統干擾。模糊自適應PID控制器相比常規PID控制器穩態誤差更小,響應速度更快。
6結語
智能控制系統在AOD爐冶煉鋼過程中特別是在濺渣護爐氮氣流量控制子系統中發揮著至關重要的作用。文中所提出的模糊自適應PID控制是在原有的普通PID控制算法的基礎上增加了模糊控制算法,大大提高了系統對濺渣護爐過程中氮氣流量的控制速度和精度,對AOD爐冶煉過程有非常重要的作用。目前,基于模糊自適應PID控制實現的氮氣流量控制系統已經在濺渣護爐控制系統中成功應用[8]。
參考文獻:
[1]劉金坤.先進PID控制Matlab仿真[M].北京:電子工業出版社,2004.
[2]黃文梅,楊勇,熊桂林,等.系統仿真分析與設計Matlab語言工程應用[M].長沙:國防科技大學出版社,2001.
[3]King P J, Mandani E M. The application of Fuzzy control systems to industrial processes[J]. Automatica,1977,13(3):235-242.
[4]于歡歡,許紅巖,張洋,等.模糊控制在AOD爐冶煉鉻鐵合金噴濺系統中的應用[J].長春工業大學學報:自然科學版,2011,32(1):1-6.
[5]鄭沛然,煉鋼學[M].北京:冶金工業出版社,1994.
[6]馮濤,柴蒼修.基于模糊PID的傳熱性能測試系統流量控制研究[J].自動化儀表,2004(12):61-64.
[7]徐南平.鋼鐵冶金實驗技術及研究方法[M].北京:冶金工業出版社,1995.
[8]張浩.精煉爐底吹氬智能控制系統的研究[D].西安:西安理工大學,2002.
AdaptiveFuzzyPIDcontrolfornitrogenflowinAODslagsplashing
XUChengsheng1,QIUDong1,WANGHongzhi2
(1.SchoolofElectrical&ElectronicEngineering,ChangchunUniversityofTechnology,Changchun130012,China;2.SchoolofComputerScience&Engineering,ChangchunUniversityofTechnology,Changchun130012,China)
Abstract:Forthefeaturessuchasnon-linear,time-variedofnitrogenflowrateinAODslagsplashingsystem,anadaptivefuzzyPIDcontrollerisstudied.SimulationresultsinMATLABshowthatthesystemshowsthegooddynamicandstaticperformance.
Keywords:Fuzzyadaptive;PID;flowcontrol.
收稿日期:2016-01-25
基金項目:長春市科技局重大科技攻關項目(2013264)
作者簡介:徐成勝(1988-),男,漢族,河南信陽人,長春工業大學碩士研究生,主要從事冶金過程控制方向研究,E-mail:991923712@qq.com.
DOI:10.15923/j.cnki.cn22-1382/t.2016.3.10
中圖分類號:TP273.2
文獻標志碼:A
文章編號:1674-1374(2016)03-0256-05