基于生物免疫機制的無線傳感執行網絡協同方法
2016-07-19 02:07:21成國營
計算機應用與軟件 2016年6期
成國營 王 艷
(江南大學物聯網工程學院 江蘇 無錫 214122)
?
基于生物免疫機制的無線傳感執行網絡協同方法
成國營王艷
(江南大學物聯網工程學院江蘇 無錫 214122)
摘要以無線傳感執行網絡為對象,借鑒生物免疫機制,以能量高效、任務高效協作為目標,首先建立無線傳感執行網絡協同問題與生物免疫機制的類比模型,進而分別針對傳感器—執行器協同及執行器—執行器協同問題,提出基于生物免疫機制的傳感器—執行器自適應路由協同算法,及執行器—執行器任務協同算法,并給出算法執行流程。最后,通過仿真驗證了方法的有效性與優越性。仿真結果表明,采用所提出的協同方法, 不但優化了WSAN信息傳遞路徑, 而且降低了網絡能耗, 同時改善了能量均衡指標。
關鍵詞生物免疫協同自適應能量均衡
0引言
無線傳感執行網絡(WSAN)是最近提出的新型網絡模型。WSAN通過分布在各個區域內的傳感器節點感知、監測和采集事件信息,以多跳自組織的形式傳送到執行器節點。執行器節點根據接收到的信息作出相應的決策,然后作出相應的執行操作,從而實現傳感器節點、環境、執行器節點之間的實時動態的交互[1,2]。與無線傳感器網絡不同,執行器節點的加入導致網絡中節點的屬性、通信、任務分配更為復雜[3]。可見,在傳感器間、執行器間以及傳感器與執行器之間達成可靠、實時、低功耗的協作機制是WSAN必須解決的關鍵問題之一。
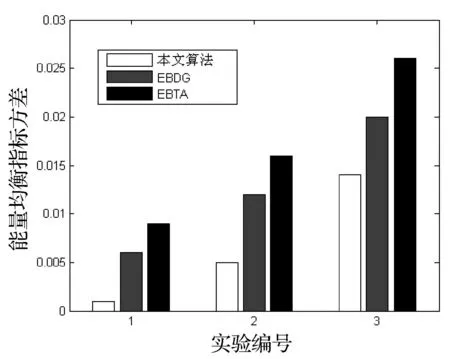
文獻[15]提出一種基于無線傳感網的多機器人任務分配算法。通過神經網絡算法,解決多機器人任務分配的隨機性約束模型問題,該算法復雜度高,而且會延長執行器節點的響應時間。文獻[16]提出了一種優化算法,將全網絡任務在簇頭上的分配問題建模成0-1非線性優化問題,以最大化所有簇頭的生命周期的權重之和為目標函數,但忽略了實時性。文獻[14]提出了一種啟發式實時任務分配算法EBDG,結合了通信和計算任務的映射和調度,但沒有考慮任務的執行順序。文獻[13]為一種基于能量平衡的任務分配算法EBTA,但只適用于單跳簇單元。
基于此, 本文針對WSAN中傳感器—執行器、執行器—執行器間的協作問題,在生物免疫系統協作機制的啟發下,以節能、網絡執行效率為設計目標,提出一種生物免疫啟發的WSAN協同方法。
1WSAN網絡模型
WSAN節點間協同的目的在于設計一種智能協作機制,使得多個簡單的傳感、執行節點可以相互間協調共同完成復雜的任務[4]。
WSAN正常工作的先決條件是有效協作,包括傳感器與傳感器、傳感器與執行器、執行器與執行器之間的協作。協作所面臨的問題:(1) 如何選擇發送節點和信息傳輸路徑,以確保該事件信息的感知快速而可靠地傳遞到目標執行器;(2) 如何選擇執行器來執行任務,確保按時完成任務[5]。WSAN網絡結構如圖1所示。
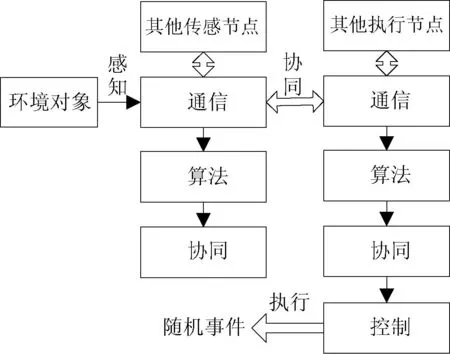
圖1 WSAN的網絡結構圖
1.1生物免疫系統協作機理
生物免疫系統是一個極其復雜的自適應調節系統。通過免疫細胞產生相應的抗體,用于識別和抵抗外部入侵的抗原,并保護人體免受入侵,同時對此類型的抗原進行記憶,當有類似的抗原再次入侵時,快速啟動“二次免疫反應”[6]。這種自適應免疫系統具有很強的記憶和學習功能,協作免疫機理中B細胞產生大量的抗原刺激后的抗體,其濃度由B細胞和抗原之間親和度的大小決定,所受刺激越強,親和度越高,抗體濃度就越高。其中一部分B細胞,以記憶細胞的形式將被長期保存下來[7],以便在下次遇到同樣的抗原時迅速進行二次免疫。
1.2生物免疫系統與WSAN協同之間的關系
從1.1節免疫系統作用機理可以看出,病毒入侵時,機體中的B細胞受到病原體刺激會產生一定濃度的抗體,其濃度由病原體與抗體的親和度、抗體與相似抗體間的親和度共同決定,當兩者綜合作用親和度之和超過某一閾值時,抗體被激活,消滅抗原。類推到免疫系統中可以發現,傳感節點到執行節點的路由選擇由相鄰節點間的剩余能量和間距決定的,當剩余能量和間距的綜合指標值滿足一定閾值時,傳感節點被選中傳遞事件信息;而在執行器與執行器的協同中,利用消耗能量與剩余能量之比建立目標函數,運用生物免疫算法來選擇最佳的任務執行方案。因此,生物免疫機制與WSAN協作機制之間可建立如表1所示的映射關系。
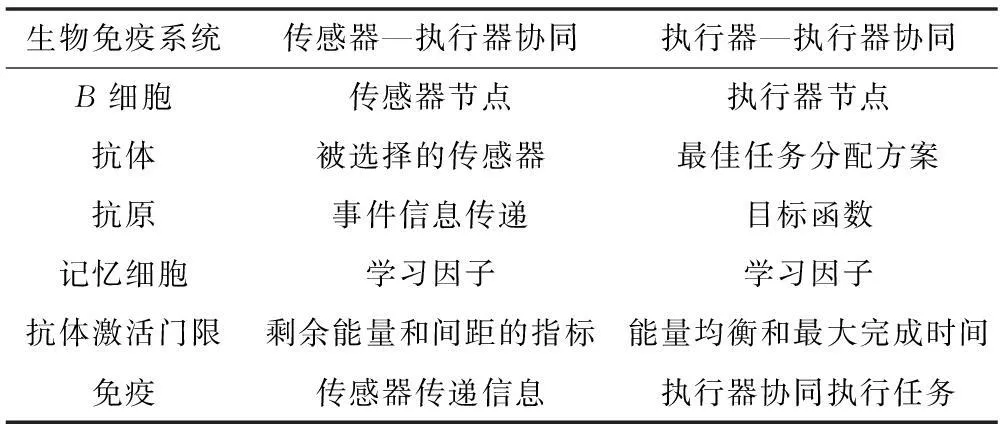
表1 生物免疫系統與WSAN協作機制之間的關系
2無線傳感執行網絡的協同方法
2.1傳感節點與執行節點間的路由協同
生物免疫系統中免疫響應就是通過抗原對抗體的刺激作用,產生大量的多樣性抗體,從中選擇最匹配去消滅抗原。于此類似,在一定約束條件下,確定從傳感器到執行器的路由時,也需選擇一條最佳路由。可見,兩者的最終目的是一致的。本文在以執行器節點為簇頭的分簇網絡結構環境下,研究了WSAN網絡中傳感器節點傳遞信息的概率問題,主要取決于該傳感器節點與上一跳節點的間距以及剩余能量的綜合指標。
2.1.1通信節點的選擇
定義1假設傳感節點的通信半徑為R,節點i與相鄰節點j之間的距離為d(i,j),則距離約束因子α為:
(1)
定義2設節點i的相鄰節點j在傳遞信息時所消耗的能量和初始能量分別為EC和E,則剩余能量約束因子β為:
(2)
定義P為傳感器節點被激活通信的概率,計算公式如下所示:
(3)
其中:Zα·β為下一跳節點j的剩余能量和間距的綜合指標,N為節點激活閾值,K為學習因子,Z為定常系數。
當傳感器節點j的剩余能量和間距綜合指標Zα·β>N時,節點j被選為通信節點的概率較大。可以看出,只要α和β其中一項值為零,不論另一項的值有多高,被選中的概率都將為零,也就不能被選為下一跳節點,從而可以有效篩除那些距離近但剩余能量低的鄰居節點。在選擇通信節點過程中引入學習因子K, 用以記住或是遺忘事件,相當于免疫系統中的記憶細胞對抗原的“二次響應”。當綜合指標Zα·β>N時, 記住該事件, 變更節點j的學習因子為:
K=K-θ
(4)
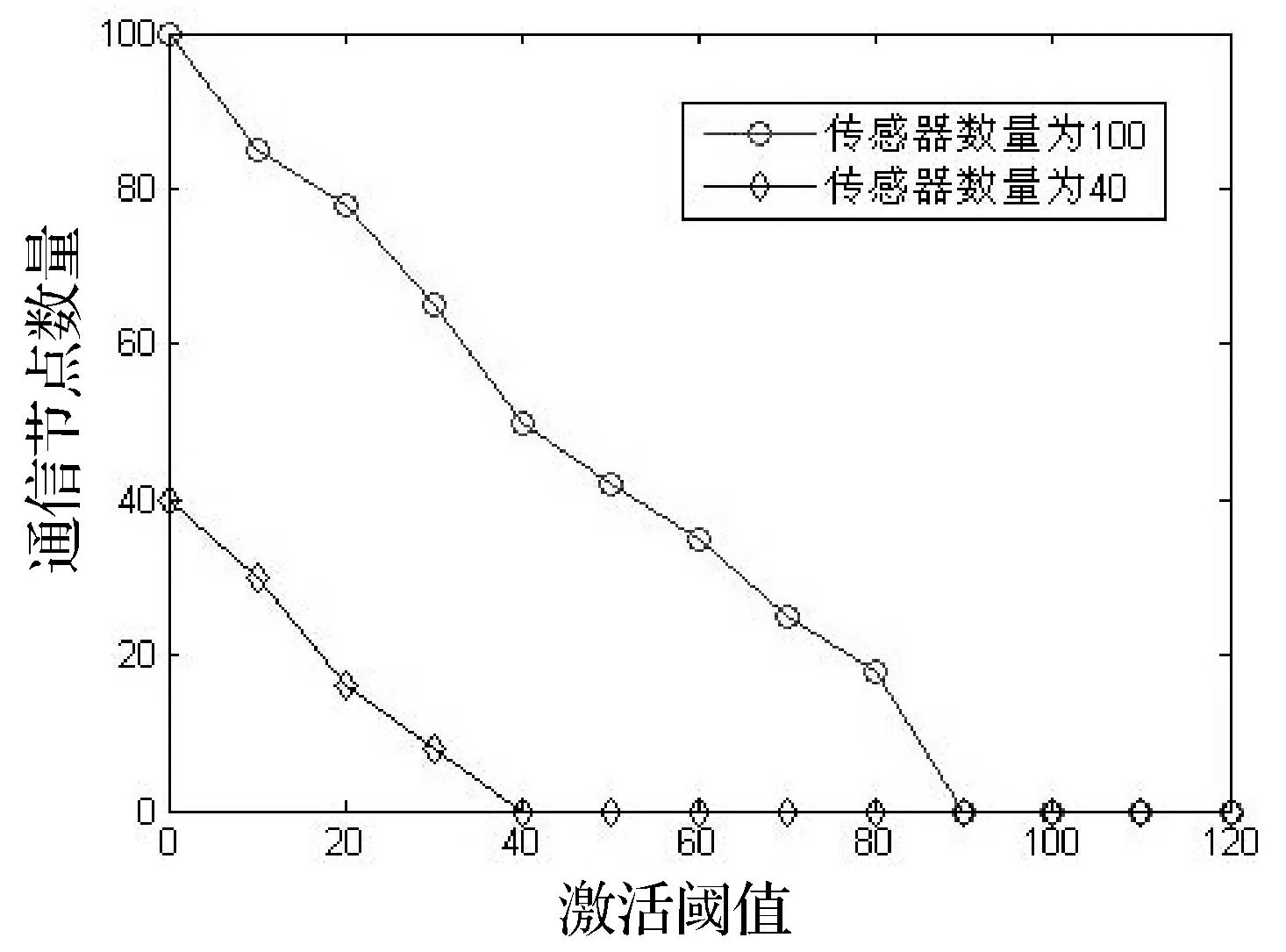
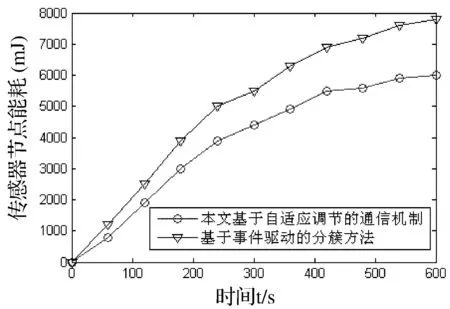
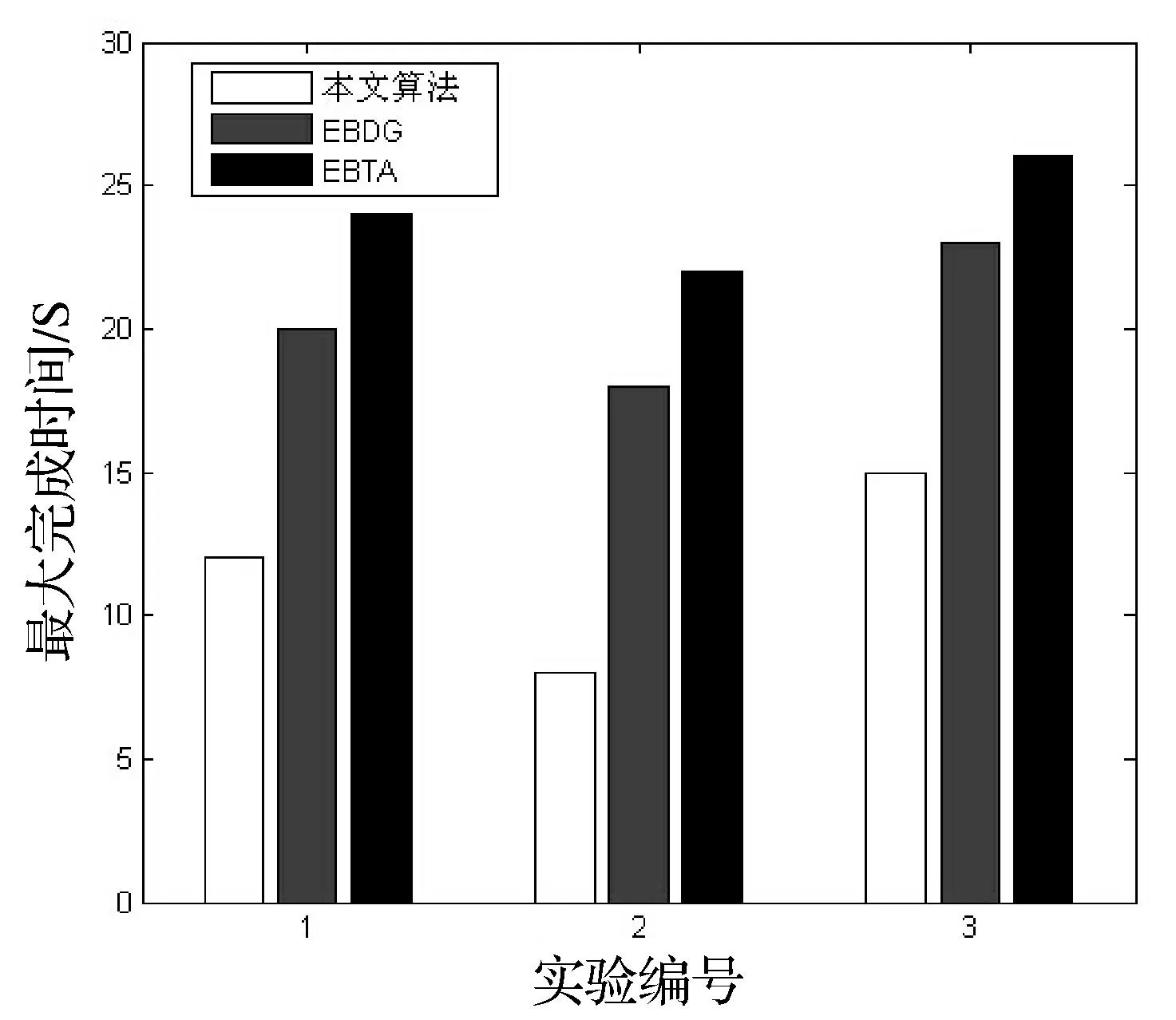
增大節點j被選為通信節點的概率:
當Zα·β K=K+θ (5) 減小節點j被選為通信節點的概率。 2.1.2協同節點數量的確定 上一節中討論了協同節點的選擇方法,P值大的節點被選中的可能性較大。但為了減少能耗,選中的傳感器節點不是每個都需要參加通信,確定傳感器節點數量就成了協同的一個關鍵問題。本文基于免疫系統中抗體濃度的自適應調節機制提出了通信節點數量的自適應調節方法。步驟如下: 步驟1在執行器節點設置一個閾值N用于判定節點是否被激活,其初始值盡可能小,使得網絡中傳感器節點盡可能都成為激活節點。 步驟2在執行器節點利用接收到的事件信息,計算出事件信息傳遞到執行器節點的誤差,計算公式如下[8]: (6) 步驟3將出始閾值增加ΔN,并將新的閾值廣播給網絡中每個節點,觀察D(X)的變化。若D(X)仍在約束范圍內,則減少傳感器節點的數量,說明以當前的抗體就能免疫抗原,繼續增加閾值。 步驟4隨著初始閾值N的繼續增加,滿足約束條件的傳感節點的數量逐漸減少。當達到步驟2中最大約束值時,停止增加初始閾值N,并將最后的N廣播給所有節點。 步驟5將N與節點親和度(Zα·β)進行比較,按照式(3)計算的概率來選擇通信節點。 2.2執行器節點與執行器節點間的任務協同 由表1的對應關系可知,B細胞受病原體刺激產生抗體來消滅抗原。同樣執行器接收到簇內傳感器傳遞的事件信息[9],也必須尋找最佳的任務分派方案來執行任務。基于此本文提出了一種利用生物免疫算法的任務分派方案。 2.2.1執行器—執行器任務協同模型 在以執行器節點為簇頭的分簇網絡結構中,當事件發生后,傳感器節點向本簇執行器節點發送信息。該執行器節點根據事件信息執行相應的任務,或協同其他執行器節點,共同完成任務。針對任務需要多個執行器節點執行問題,協同算法將事件分解為多個子任務,并從能量均衡和最大完成時間兩個性能指標方面,將任務分配問題抽象成多目標優化問題,并運用歸一化處理方法將之轉化為單目標優化問題。最終運行免疫算法得出最佳分配方案。 2.2.2執行器—執行器任務協同相關定義和假設 事件由多個子任務組成,這些子任務可由網絡中的多個執行器協同完成,有利于減小事件多發地區的節點執行壓力,降低能量消耗,保證執行的實時性,使得網絡能耗趨于均衡,延長網絡生命周期。對結構相同的執行器有如下假設和定義: 假設1一事件有n個執行步驟,在m個執行節點上執行,在此過程中每個步驟的執行順序已知。 定義3執行一個突發事件的步驟包括通信、處理數據、動作執行等,其能耗和執行時間可知,稱該步驟為一個任務執行單元,簡稱任務子單元,記為ti,一個任務t=t1∪t2∪…∪t3。 2.2.3任務完成時間 設ti,j為任務i在執行器節點j上的執行時間,T(ji,k)為任務j的第i個子任務在執行器節點k上的執行完成時間。無線傳感執行網絡中一個子任務的執行時間有兩部分組成:數據處理時間tp,數據采集與執行時間tc,得到: ti,j=tc+tp (7) 每個任務在各執行器節點上的完成時間可表達如下: T(j1,1)=tj1,1 (8) T(ji,1)=T(ji-1,1)+tji,1xji,1i=2,3,…,n (9) T(j1,k)=T(j1,k-1)+tj1,kxj1,kk=2,3,…,m (10) 其中xji,k=1表示執行器節點k被選中執行子任務ji,反之則表示沒被選中。式(9)表示1號執行器節點執行子任務ji的完成時間等于子任務ji的執行時間加上執行子任務ji-1的完成時間。由此推出: T(ji,k)=max{T(ji-1,k),T(ji,k-1)}+tji,kxji,k (11) 式(11)表示執行器節點k執行子任務ji的條件是子任務ji在上一個執行器節點k-1的子任務已經完成同時執行器k也完成上一個子任務ji-1,則推出最大完成時間為: Tmax=T(jn,m) (12) 要求任務在最短的時間內完成,必須減少任務最大完成時間Tmax,由此得到的其目標函數為: minf1=minTmax (13) 2.2.4能量均衡指數 在任務分配的過程中,不僅需要考慮最大完成時間,同時也必須兼顧能耗均衡指標,延長網絡壽命。設Et為單位時間內執行器執行任務所需耗能,則執行器節點k執行任務所需的能耗為: (14) 同時必須考慮到執行器節點剩余能量的約束,每個執行器節點的剩余能量一方面要完成所有子任務,同時還要將執行結果傳給下一執行器節點。根據文獻[10]提出的發射硬件能耗模型,發送到下一節點和接收能耗為: Es=(λrω+μ)l (15) Er=μl (16) 其中λrω為傳輸的發射功率;μ發射電路能耗系數;ω為信道衰減倍數;r為執行器節點通信距離;l為幀長。則一個執行器節點k執行所有子任務的總能耗為: (17) 通過上述描述建立如下目標函數: (18) 式(18)為整個網絡的執行器能量均衡目標函數,比值越小表示剩余能量多的執行器節點執行任務越多。 2.2.5利用生物免疫算法選擇最佳執行方案 在上述兩個性能指標優化問題中,不一定存在絕對的最優解,但肯定存在有效解。將這兩個目標優化問題轉換為單目標優化問題,先分別求出問題中兩個目標函數的最優值。然后讓每個目標盡量接近各自的最優值,以獲得多目標問題的最優解。 設目標函數為f=(f1,f2),評價函數為u(f),由此推出: u(f)=‖f-f*‖ (19) 式(19)為目標值f與理想值f*之間的歐式距離,其值越小表示問題的最優解越好。運行步驟如下: 步驟2比較最優解x1、x2是否相等,如果相等則得到最終最優解,算法終止,否則繼續步驟3。 步驟3隨機產生權值η1、η2,求解多目標優化問題。 3仿真 對本文提出的基于生物免疫機制的協同方法研究,假設在50m×50m的監測區域,隨機部署100個傳感器節點,在監測邊緣區域放置10個執行器節點,事件發生區域是在以中心位置(50,50)為圓心,半徑為5m的圓形區域[11]。仿真實驗參數如表2所示。 表2 仿真參數 續表2 如圖2所示,節點被激活成為通信節點的數量隨著激活閾值的增加而減少。由于節點與事件地點及其他節點的位置都是固定的,相應的能耗和距離的綜合指標也就一定,通過自適應調節閾值把個體指標更高的節點挑選出來。 圖2 激活閾值與通信節點數的關系 通過圖3可以看出,事件信息在執行節點的誤差都會隨著通信節點數的增大而逐漸減少,之后會收斂于一個穩定的值。此后誤差也不會受通信節點數量行影響。因此,最先收斂的點對應的節點數即為最少通信節點數量。這樣在保證通信質量的基礎上,降低了網絡能耗。 圖3 通信節點數量與誤差D(X)的關系 圖4為本文中提出的基于自適應調節的通信機制與文獻[5]中提出的傳感器節點協作的分簇算法在節能效果上的對比。文獻[5]中方法在傳感器節點到執行器節點之間形成數據聚合樹的過程中,激活的節點數量較多,節點能耗明顯增加,由圖4可以看出, 本文提出的協同方法在節能上效果更優。 圖4 兩種方法的能耗效果對比 本文選取了文獻[12]中的實驗1、實驗2、實驗3三個測試算例進行比較,對應的任務數量分別是7、12、16;分成的子任務數量分別為25、32、58。 由圖5、圖6可知,將本文算法與算法EBTA[13]和EBDG[14]進行比較。EBTA是一種基于能量平衡的任務分配算法,但只適用于單跳簇單元;EBDG是一種啟發式實時任務分配算法,結合了通信和計算任務的映射和調度,但沒有考慮任務的執行順序。與之相比,通過本文的算法優化處理,協調各執行器節點執行任務的順序,減少了各任務在執行器節點上執行的最大完成時間。圖6表明,本文算法考慮執行器節點能量均衡指數,使得剩余能量越多的執行器節點執行能耗更大的子任務,網絡能耗更加均衡,生命周期延長。 圖5 三種算法最大完成時間對比 圖6 三種算法能量均衡指數對比 4結語 本文基于生物免疫系統協作機理對無線傳感執行網絡的協作機制進行了研究和探討。針對傳感器與執行器的有效協調,研究了一種以自適應的方式調節通信節點數量的通信路由,并引入了學習因子;針對執行器與執行器的任務協同,在以能量均衡指數和最大完成時間為性能指標的情況下,利用生物免疫算法得到最佳的任務分配方案。經過仿真實驗也證實了其高效性。 參考文獻 [1] 陳延軍,潘泉,梁彥等.基于信息量的分布式協同自組織算法[J].控制理論與應用,2011,28(10):1391-1398. [2]XuM,LeungH.AJointFusion,Powerallocationanddelayoptimizationapproachforwirelesssensornetworks[J].SensorsJournal,IEEE,2011,11(3):737-744. [3]CaiZ,RenX,HaoG,etal.Surveyonwirelesssensorandactornetwork[C]//IntelligentControlandAutomation(WCICA),2011 9thWorldCongresson.IEEE,2011:788-793. [4] 李欣,李若瓊,董海鷹.基于仿生群體協同的集群智能控制研究[J].電氣自動化,2006,28(4):3-5. [5] 張麗,劉有源,鄧瑩,等.無線傳感執行網絡中協作機制的研究[J].交通信息與安全,2007,25(1):2-3. [6]TimmisJ,EdmondsCA.Acommentonopt-aiNet:Animmunenetworkalgorithmforoptimization[J].GeneticandEvolutionaryComputation,2004,3102:308-317. [7]AtakanB,AkanOB.ImmuneSystembaseddistributednodeandrateselectioninWirelessSensorNetworks[C]//Bio-inspiredModelsofNetwork,InformationandComputingSystems,2006:1-8. [8] 陳擁軍,袁慎芳,吳鍵,等.基于免疫系統的無線傳感器網絡性能優化[J].系統工程與電子技術,2010(5):1065-1069. [9] 易軍,李太福,石為人.無線傳感器/執行器網絡SA協作分簇算法[J].華中科技大學學報:自然科學版,2011(12):89-93. [10]RappaportT.Wirelesscommunicationprinciplesandpractice[M].2nded.London:PrenticeHallPTR,2002. [11]ChenJM,ChengP,YangX,etal.Distributedcollaborativecontrolforindustrialautomationwithwirelesssensorandactuatornet-works[J].IEEETransactionsonIndustrialElectronics,2010,57(12):4219-4230. [12]XiaW,WuZ.Aneffectivehybridoptimizationapproachformulti-objectiveflexiblejob-shopschedulingproblems[J].Computers&IndustrialEngineering,2005,48(2):409-425. [13]YuY,PrasannaVK.Energy-BalancedTaskAllocationforCollaborativeProcessinginWirelessSensorNetworks[J].MobileNetworksandApplications,2005,10(1-2):115-131. [14]ZengZ,LiuA,LiD,etal.AhighlyefficientDAGtaskschedulingalgorithmforWirelessSensorNetworks[C]//The9thInternationalConferenceforYoungComputerScientists.Hunan:IEEE,2008:570-575. [15]XueHan.Bio-inspiredstochasticchance-constrainedmulti-robottaskallocationusingWSN[C]//IEEEIntJointConfonNeuralNetworks.HongKong:IEEEPress,2008:721-726. [16]YounisM,AkkayaK,KunjithapathamA.Optimizationoftaskallocationinacluster-basedsensornetwork[C]//the8thIEEEIntSymposiumonComputersandCommunication.Netherlands:IEEEComputerPress,2003:329-334. A COLLABORATIVE METHOD BASED ON BIOLOGICAL IMMUNE MECHANISM FORWIRELESSSENSORANDACTUATORNETWORK Cheng GuoyingWang Yan (Internet of Things,Jiangnan University,Wuxi 214122,Jiangsu,China) AbstractTaking the wireless sensor and actuator networks as the object, the biological immune mechanism as the reference, and the energy efficiency and efficient task collaboration as the purpose, in this paper we first build the analogy model of the wireless sensor and actuator networks problem in contrast with biological immune mechanism, then further present the biological immune mechanism-based adaptive sensor-actuator routing collaboration algorithm for the collaborations of sensor-actuator and actuator-actuator problems respectively, as well as give the implementation process of the algorithm. Finally the effectiveness and advantage of the proposed method are validated through simulation. Simulation results show that to employ the collaboration method proposed can optimise the information transmission path in WSAN, and can reduce networks energy cost as well, besides, the energy equilibrium index is improved too. KeywordsImmune systemCollaborationAdaptiveEnergy equilibrium 收稿日期:2014-12-03。國家高技術研究發展計劃項目(2014AA 041505);江蘇省產學研前瞻性項目(BY2013015-15)。成國營,碩士生,主研領域:無線傳感執行網絡的協同控制。王艷,副教授。 中圖分類號TP273 文獻標識碼A DOI:10.3969/j.issn.1000-386x.2016.06.030