基于Hough森林的多特征快速行人檢測
2016-07-19 02:07:22谷靈康周鳴爭
計算機應用與軟件 2016年6期
谷靈康 周鳴爭
(安徽工程大學計算機與信息學院計算機應用技術重點實驗室 安徽 蕪湖 241000)
?
基于Hough森林的多特征快速行人檢測
谷靈康周鳴爭
(安徽工程大學計算機與信息學院計算機應用技術重點實驗室安徽 蕪湖 241000)
摘要為了快速檢測行人,根據人體頭頂特性快速找出頭頂候選點,依此為基點利用邊緣檢測算法提取目標輪廓,將其作為待測區域;然后利用改進的顏色自相似特征、結合區域邊緣直方圖和一致模式特征,在Hough森林分類器上進行分類檢測。實驗結果表明,該算法在檢測正確率及速率方面都得到了提高,對于復雜動態場景、遮擋現象以及目標自身形變具有較強的魯棒性和較高的準確性,在多種行人數據集中測試取得良好的效果。
關鍵詞行人檢測像素點梯度方向局部顏色自相似特征區域邊緣直方圖局部二值模式Hough森林
0引言
行人檢測是智能視頻監控、機器視覺、車輛輔助駕駛等應用的第一步,吸引了大批研究者,取得了一定的研究成果[1]。但是由于行人的特殊性,場景的復雜多樣性,若想取得又快又準的檢測識別效果,還需要進一步的努力。如果想快速檢測行人,通常情況下是選用單一特征,這也是早期行人檢測所采用的方法,但是檢測效果不理想,不能有效檢測行人。為了準確檢測行人,近年來很多研究者提出多特征融合的方法,這樣固然能提高檢測的準確性,但是需要花費大量的時間,不能滿足行人檢測對實時性的要求。針對這些問題,本文根據人體特性提出一種快速且有效的行人檢測方法。
1算法思路
因行人全身包含的信息很多,所以目前的行人檢測方法大多是根據行人全身的特征來判斷的,但對于復雜場景,特別是有身體遮擋的情況下,要想獲得行人全身信息是不太可能的,但這種情況下,通常還能獲取行人的頭頂信息,本文依此頭頂點為基點,利用邊緣檢測算子獲取邊緣輪廓,將其作為候選目標,然后利用改進的邊緣方向直方圖方法提取區域邊緣直方圖特征。
另外對于行人,身體顏色具有一定的自相似性,衣服顏色以及膚色的相似度很高,且頭發的顏色和臉部的膚色不依賴于面部的細節特征,在表情變化、頭部偏轉等情況下仍能適用,具有相對的穩定性。而且人體顏色有別于大多數背景物體的顏色,因此為了提高檢測率對候選目標利用改進的顏色自相似算法進行特征提取。
為了提高檢測準確性,僅提取顏色自相似特征還不夠,考慮到紋理是反映目標表面色度和亮度變化模式的視覺特征,因此需要選擇一種高效的紋理特征提取算法。
為了能夠提高檢測正確率而提取多種特征,但這樣就增加了維度,從而影響檢測速度。這就要求選擇學習速度快、分類能力強的分類器。隨機森林是一個包含多個決策樹的分類器、優點是學習速度很快,缺點是存在過擬合[2]。基于Hough森林的目標檢測是近期提出的一種新方法,重點考察圖像塊與目標中心的位置關系,在葉節點處增加計算,輸出成為在連續區域上的投票。Hough森林是在隨機森林框架上的一個擴展,繼承了隨機森林的優點并改進了其缺點[3]。根據以上思路,本文算法流程如圖1所示。
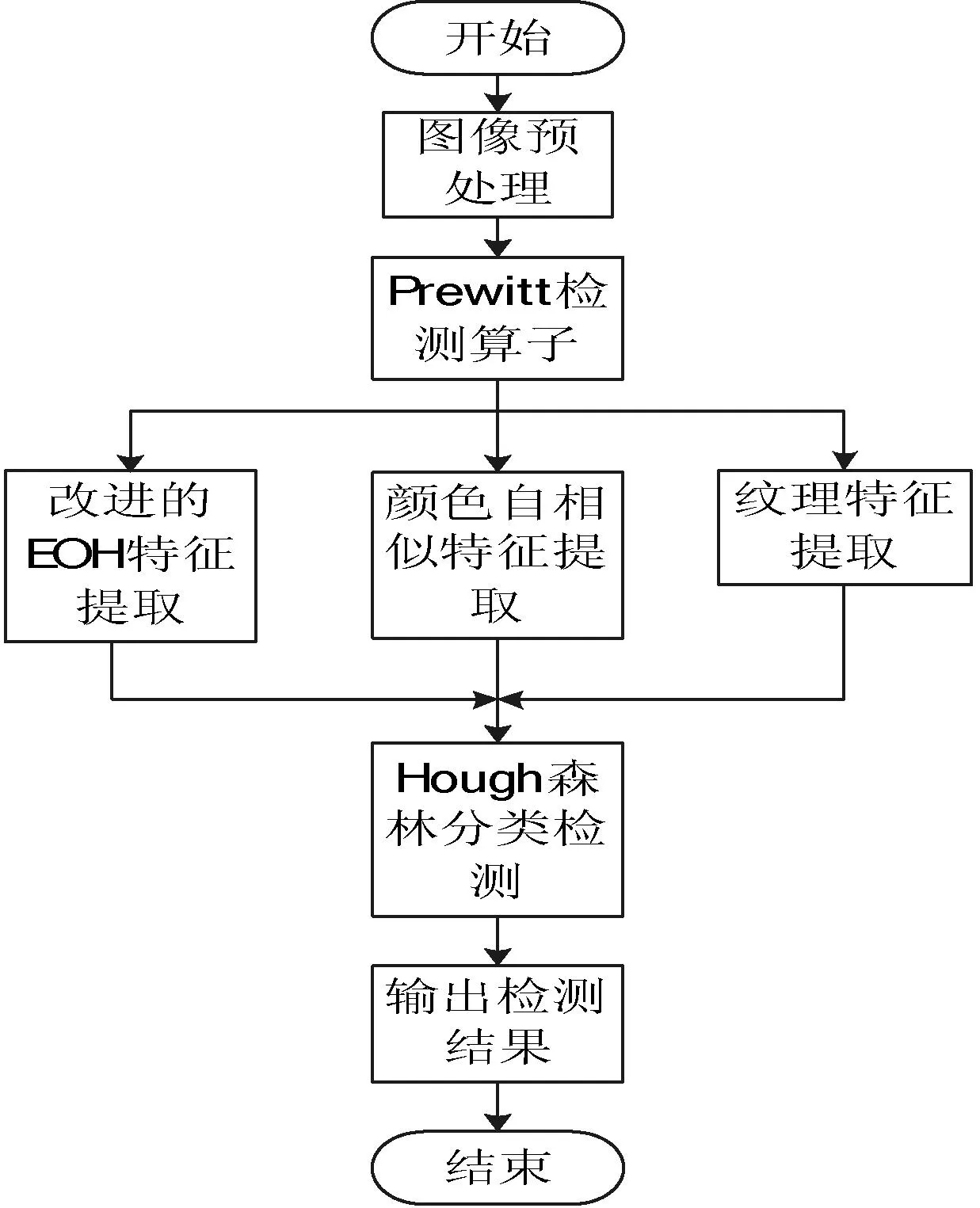
圖1 本文算法流程圖
2快速頭頂點確定方法
由于人的頭頂是橢圓形,且經過計算發現頭頂像素點的梯度方向值基本在90°左右[4]。本文利用頭頂像素點的梯度方向具有固定范圍這一特性在前景中找出頭頂候選點,根據該點快速確定人體輪廓域。
算法中像素點(x,y)的灰度值用H代替,G代表梯度幅值,α為梯度方向。采用一維中心算子[-1,0,1],可得到水平和垂直方向的梯度幅值分別為:
Gx(x,y)=H(x+1,y)-H(x-1,y)Gy(x,y)=H(x,y+1)-H(x,y-1)
(1)
則(x,y)像素點的梯度方向為:
(2)
通過計算及實驗測試,人體頭頂像素點梯度的切線方向在 90°左右,發型的不同對頭頂的形狀變化會有一定的影響,但是不大。
根據上述計算方法選取前景中梯度方向在規定范圍內的像素點作為頭頂候選點,然后依此點為基點,利用Prewitt檢測算子提取邊緣輪廓,且能去掉部分偽邊緣,對噪聲具有平滑作用。
3改進的EOH特征提取方法
邊緣方向直方圖(EOH)能較好體現圖像的邊緣和紋理特征,通過統計圖像邊緣像素的方向分布來描述圖像特征,其計算方法為:1) 對圖像進行邊緣算子運算;2) 計算各邊緣像素的梯度幅值和梯度方向,并判斷梯度方向所隸屬的直方圖子區間;3) 統計隸屬于直方圖各子區間的所有邊緣像素的梯度幅值和;4) 對所得的直方圖各子區間取值進行歸一化得到最終的邊緣方向直方圖[5]。
由于傳統直方圖僅統計圖像像素取值的頻率分布,所以當兩幅圖像像素的頻率相同時,其無法進行區分。此時,雖然兩幅圖像像素取值的頻率分布相同,但直方圖各子區間對應區域的邊緣分布是有差別的。基于此,如果用各子區間的邊緣復雜度來度量各區間構成的區域的分散程度,即可以得到一組度量灰度直方圖各子區間內像素空間分布的數據。利用該組數據對直方圖的各子區間進行加權,便可得到一組新的直方圖,由邊緣復雜度得到的權值數據稱為該直方圖的空間權因子。如圖2所示。

圖2 原圖及2種算法檢測結果對比圖
設灰度直方圖第k個子區間內所有像素構成的區域的邊緣復雜度為φk。將歸一化后的數據記為(Ф1,…,Фk,…,Фn),則其為一組體現像素空間分布復雜度的加權直方圖數據.對于其第k個子區間的數值Фk。
(3)
式(3)表明,Фk的大小只與該區間對應區域的邊緣像素的總數К(Ek)有關,也即計算時只需要統計直方圖各子區間對應區域的邊緣像素的個數,因此該方法是一種基于區域邊緣統計的圖像特征描述方法。
區域邊緣像素的引入反映了圖像的結構信息,檢測結果與EOH相比如下圖所示,從另一個角度解釋了區域邊緣直方圖具有更強的圖像特征區分度的原因,能夠對圖像進行有效的區分。
4改進的顏色自相似特征及紋理特征提取
人的身體顏色具有一定的自相似性,如:人體衣服顏色以及兩臂顏色的相似度很高。基于此,Walk等[6]提出一種顏色相似度特征CSSF(ColorSelf-SimilarityFeature) ,用于行人檢測,有效提高了檢測精度,但其計算的是全局圖像中每兩個塊之間的相似性,計算量非常大,特征維數高,檢測速度較慢。文獻[7]對CSSF進行了改良,但該特征維度達到千萬級,仍然較高,難以滿足實際應用需要。本文結合輪廓特征,提出改進的顏色自相似特征。
4.1傳統的顏色自相似特征
傳統的顏色相似度特征基于矩形特征,對于矩形塊R1,其內部數值和為:
(4)
CSSF特征可由相鄰塊R1和R2數值和的比值得到:
F(R1,R2)=sumR1/sumR2
(5)
式中,R1和R2大小相等且位置不同(設矩形塊寬為w,高為h),該方法可以衡量矩形塊之間的相似度。比值越接近1,兩矩形塊越相似。為此,對F特征進行非線性轉換得到F′特征:
(6)
對于傳統CSSF特征當兩矩形塊相距較遠時,其光照情況可能相差較大,導致特征對非均勻光照敏感;而如果把矩形塊之間的距離限定得太小,又會增加計算量,導致特征空間維度過高。近些年有很多學者試圖對CSSF進行改良,如文獻[7-9],但特征維度仍然很高,勢必會影響檢測效率。基于此,本文對顏色相似特征進一步改進。
4.2改進的顏色自相似特征
為了降低特征維度又不至于導致對非均勻光照敏感,本文對矩形塊的高寬比及塊之間的距離進行約束。
對于分別以點(x1,y1)和(x2,y2)為左上角坐標的矩形塊R1和R2,當其滿足式(7)時,則計算這兩個塊之間的相似度。
(7)
其中δ為約束閾值,一般情況下取值為3。在實驗過程中可以根據檢測效果調整閾值和w及h的值;另外在實驗過程中還發現當高寬比(即h/w)為0.68黃金比例時,檢測效果最好(如圖3所示)。
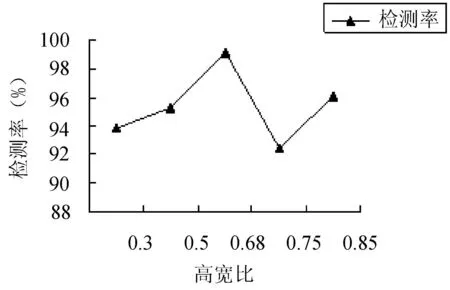
圖3 不同高寬比對應的檢測率
由于有了候選區域去除了背景信息且對矩形塊的高寬比及塊之間的距離進行了約束,相比于文獻[7]、文獻[8]和文獻[9],去除了大量冗余信息,其特征空間進一步降低。
4.3改進的旋轉不變性LBP紋理特征提取
LBP特征[10]是由Ojala等在1994年提出的一種高效的局部紋理特征提取算法。LBP特征能夠較好地反映像素點局部鄰域的空間分布模式,且該特征具有計算速度快的優點。基本的LBP算子的計算公式為:

(8)

5Hough森林檢測算法
5.1原理
Hough森 林[13],由一系列決策樹h(x,θk) ,k=1,2,…組成,森林中的每棵樹都是由一系列的葉節點和非葉節點形成的,節點是由隨機抽選的局部圖像塊來創建的。
Hough森林屬于機器學習中的監督學習,通過訓練,學會如何將局部的圖像塊特征與它們在Hough空間H?RH內的投票相映射:

(9)
表示圖像元素特征到概率Hough投票的映射模型:其中,τ為從輸入圖像空間y∈Ω?RD到特征(I1(y),I2(y),…,IF(y))∈RF的映射,每一個IF是一個特征向量子分量,F為總的特征維數;p(h|L(y))是Hough空間內Hough投票的分布。
5.2收斂性研究
假設訓練集{(x,y)}是由隨機輸入向量x和輸出向量y分布所抽取出來的,那么對于給定的k個分類器的集合{h1(x),h2(x),…,hk(x)}可以定義間隔函數為式(1)。
mg(x,y)=kavI(hk=y)-maxj≠ykavI(hk(x)=j)
(10)
用投票和概率平均(表達式如下)得到測試的預測類標簽:
(11)
(12)
式中I(·)是示性函數,kav(·)為對k取平均值,ji為森林中的k棵決策樹的權重。類標簽由投票來決定,得票存在于決策樹的給定閾值范圍。可以導出泛化誤差:
Ep=Px,y(my(x,y)<0)
(13)
當森林中數目較大時,由樹結構和大數定律導出隨機向量趨向值如式(14):
Px,y(Pθ(h(x,θ)=y)=y-maxj≠yPθ(h(x,θ)=j)<0)
(14)
隨機森林邊緣函數:
(15)
決策樹的分類強度s為:
s=Ex,ymr(x,y)
(16)
設s≥0,根據Chebyshev不等式由式(15)、式(16) 得到泛化誤差:
(17)
其中Var(mr)形式如式(18):
(18)
而:
(19)
由式(17)~式(19)知,任意函數h,求其均值與方差,并趨近于方差上限,都有:
(20)
其中ρ是相關系數平均值。推導式(17)可知:
(21)
6仿真實驗及分析
6.1實驗數據集
拍攝包含多種場所(教學樓、停車場、道路,等)、多種天氣(晴天、雨天、霧天)等復雜情況下的行人視頻構成本文實驗樣本之一,該視頻庫部分場景背景如圖4所示。取部分視頻制作成正樣本(如圖5所示),共建正樣本4600個,其中2600個用來訓練,2 000個用來驗證,另外不含行人的背景圖稱為負樣本。
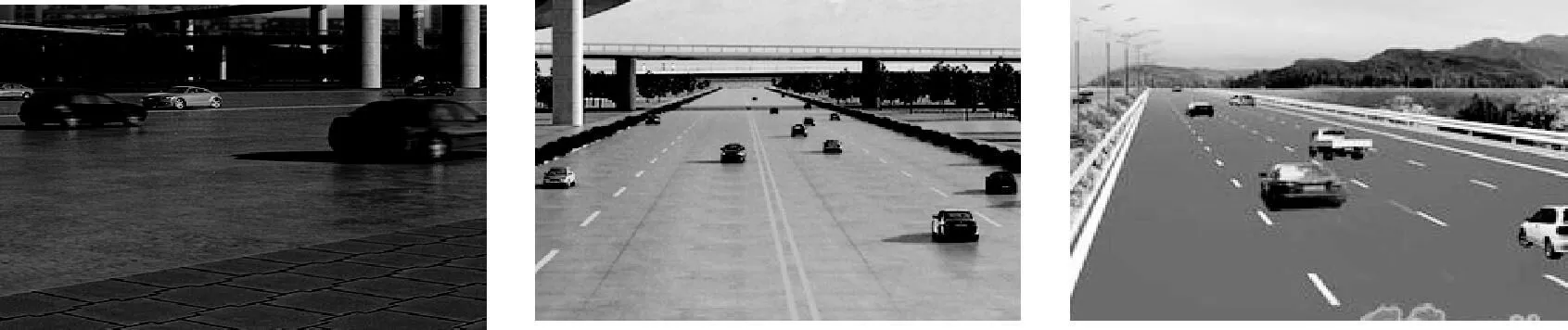
圖4 部分場景背景圖

圖5 部分正樣本
為了驗證本文所述算法檢測效果的通用性,在目前常用的行人數據集[14]中,引入2個國際上常用的數據集:INRIA行人數據集和NICTA行人數據集[15]。其中INRIA行人數據集是目前使用較多的靜態行人數據集,包含訓練和測試兩類,且每類均包含正樣本和負樣本。訓練集含有正樣本614張(包含2416個行人),負樣本1218張;測試集含有正樣本288張(包含1126個行人),負樣本453張。NICTA行人數據集是目前規模較大的靜態行人數據集,且已劃分好訓練集和測試集。
6.2實驗與結果分析
本文算法程序在Pentium(R)CPU987雙核1.5GHz, 64位Windows7系統,4GB內存的計算機上運行。
對于行人樣本圖如圖6所示。按照本文算法流程(如圖1所示)進行行人檢測,如圖7所示為實驗中部分行人檢測示意圖。

圖6 部分行人樣本圖 圖7 部分行人檢測結果示意圖
由于目前分類算法主要還是基于SVM和AdaBoost的,基于隨機森林和Hough森林的檢測是近期提出的新方法,故為了驗證本文算法將其與文獻[2]、文獻[7]、文獻[16]和文獻[17]、文獻[18]所述方法分別在自建數據集、INRIA、NICTA數據集上實驗后比較,實驗檢測率如圖8所示。

圖8 不同算法在多種數據集中的檢測率
由圖8可知,不同算法在各類行人數據集中的檢測效果相差較小。通過實驗可知本文所提算法平均檢測正確率(在三類數據集中正確檢測出的人體占整個視頻中人體的識別率)為99.07%;文獻[2]所述算法HOG+LBP+LAB+Houghforest平均檢測率為96.72%;文獻[7]所述算法CSSF+AdaBoost平均檢測率為98.16%;文獻[16]所述算法HOG+Harr+SVM平均檢測正確率為98.0%;文獻[17]所述算法HOG+IKSVM平均檢測正確率為97.65%;文獻[18]所述算法Randomforest+SVM平均檢測率為96.17%。在這幾類算法中,本文所述算法的檢測率較高,綜合這幾種算法在不同數據集的檢測率,進一步分析它們的誤檢率與漏檢率,實驗結果如圖9所示。
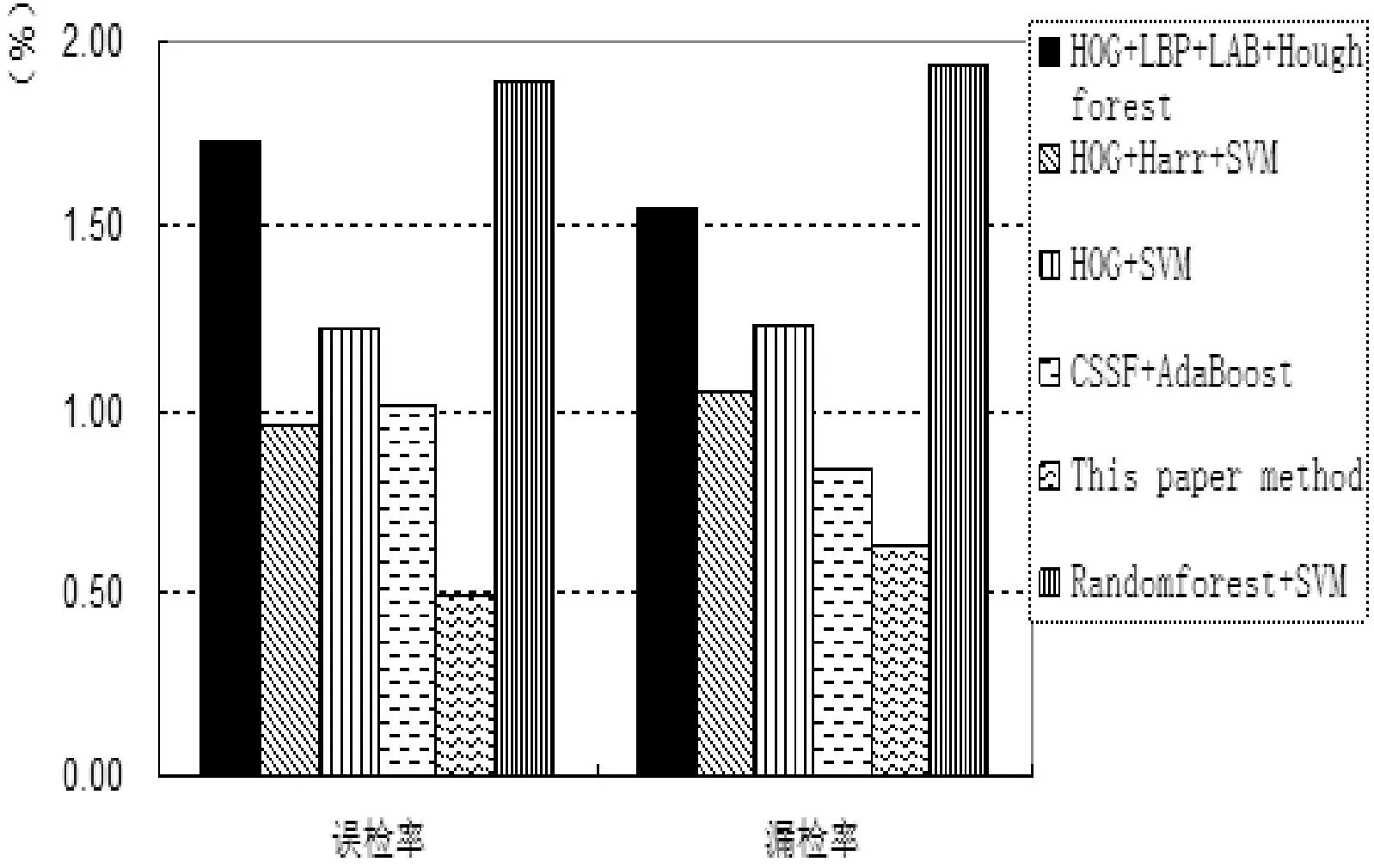
圖9 不同算法誤檢率和漏檢率比較
在檢測速率(對人體識別的平均速率)上,各算法也有較明顯的差別,如表1所示。文獻[2]所述算法HOG+LBP+LAB+Houghforest平均檢測速率較慢;文獻[16]所述算法HOG+Harr+SVM平均檢測正確率較高,誤檢率也較低,但是檢測的速率相對較慢;文獻[17]所述算法HOG+IKSVM平均檢測正確率相對較低,但是速率較快;文獻[7]所述算法CSSF+AdaBoost,由于特征空間仍為千萬級,所以檢測速率上也較慢;文獻[18]所述算法Randomforest+SVM檢測速率較快;而本文所述算法,花費時間相對較少。
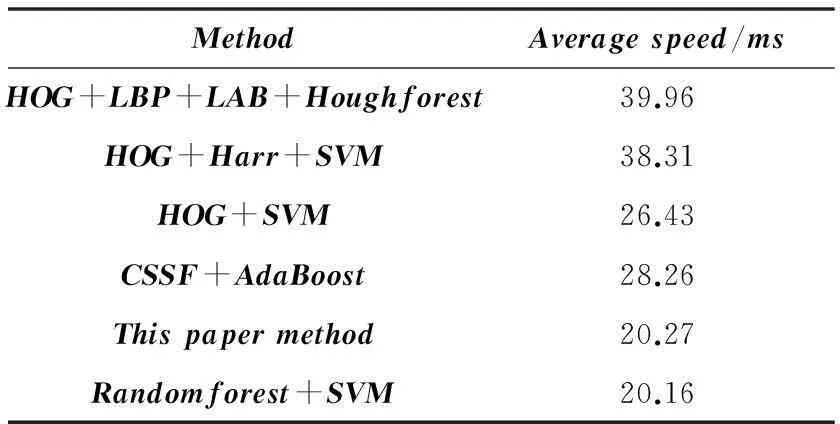
表1 不同算法檢測速率比較

7結語
參考文獻
[1]PedagadiS,OrwellJ,VelastinS,etal.Localfisherdiscriminantanalysisforpedestrianre-identification[C]//IEEEComputerSocietyConferenceonComputerVisionandPatternRecognition,Portland,USA,2013:3318-3325.
[2] 尤瑋,戴聲奎.基于多特征與改進霍夫森林的行人檢測方法[J].計算機工程與設計,2014,35(10):3538-3544.
[3]BarinovaO,LempitskyV,KholiP.Ondetectionofmultipleobjectinstancesusinghoughtransforms[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,2012,34(9):1773-1784.
[4] 欽爽,謝剛,饒欽,等.視頻中基于LW-PGD和SVM的頭肩部檢測[J].計算機應用研究,2014,31(3):949-952.
[5] 余旺盛,田孝華,侯志強.基于區域邊緣統計的圖像特征描述新方法[J].計算機學報,2014,37(6):1398-1410.
[6]WalkS,MajerN,SchindlerK,etal.Newfeaturesandinsightsforpedestriandetection[C]//CVPR2010:Proceedingsofthe2010IEEEConferenceonComputerVisionandPatterRecognition.Piscataway:IEEE,2010:1030-1037.
[7] 曾波波,王貴錦,林行剛.基于顏色自相似度特征的實時行人檢測[J].清華大學學報,2012,52(4):571-574.
[8] 饒欽,謝剛,欽爽.基于顏色自相似性和HOG特征的行人檢測[J].小型微型計算機系統,2014,35(11):2582-2585.
[9] 顧會建,陳俊周.基于改進顏色自相似特征的行人檢測方法[J].計算機應用,2014,34(7):2033-2035.
[10]OjalaT,PietikinenM,HarwoodD.PerformanceevaluationoftexturemeasureswithclassificationbasedonKullbackdiscriminationofdistributions[C]//Proceedingsofthe12thIAPRInternationalConferenceonPatternRecognition.Israel:IEEE,1994:582-585.
[11]SalbergAB,HardebergJY,JenssenR.Rotationinvariantimagedescriptionwithlocalbinarypatternhistogramfourierfeatures[C]//ISCIA2009Proceedings.Heidelberg:Springer,2009:61-70.
[12] 陳東岳,陳宗文,桑永嘉.基于多特征在線模板更新的魯棒目標跟蹤算法[J].哈爾濱工業大學學報,2014,46(7):87-94.
[13] 嚴明君,項俊,羅艷,等.基于SURF與Hough森林的人臉檢測研究[J].計算機科學,2014,41(7):301-305.
[14] 張春鳳,宋加濤,王萬良.行人檢測技術研究綜述[J].電視技術,2014,38(3):157-162.
[15]OverettG,PeterssonL,BrewerL,etal.Anewpedestriandatasetforsupervisedlearning[C]//Proc.2008IEEEIntelligentVehiclesSymposium.Eindhoven,Holland:IEEEPress,2008:373-378.
[16]HeFei,LiYali,WangShengjin,etal.ANovelHierarchicalFrameworkforHumanHead-ShoulderDetection[C]//ImageandSignalProcessing(CISP),Shanghai,China,Oct15-17,2011,3:1485-1489.
[17]SubhransuMaji,AleanderCBerg,JitendraMalik.EfficientClassificationforAdditiveKernelSVMs[J].PatternAnalysisandMachineIntelligence,2013,35(1):66-77.
[18] 習文星,湯心溢.基于隨機森林和支持向量機的快速行人檢測算法[J].計算機應用,2014,34(S2):283-285.
MULTI-FEATURE FAST PEDESTRIAN DETECTION ALGORITHMBASEDONHOUGHFOREST
Gu LingkangZhou Mingzheng
(Key Laboratory of Computer Application Technology,College of Computer and Information,Anhui Polytechnic University,Wuhu 241000,Anhui,China)
AbstractIn order to quickly detect pedestrians, we first rapidly found out the candidates of the top of the head according to the characteristics of human head tops, and according to this base point we extracted the object contour by using edge detection algorithm and took it as the area to be tested. Secondly, by using the improved colour self-similarity character and combining the region edge histogram and uniform pattern characters, we conducted the classification and detection on Hough forest classifier. Experimental results showed that, the algorithm proposed in this paper gained the improvement in both the detection accuracy and speed, and had stronger robustness and higher accuracy against the cluttered dynamic background, occlusion and the deformation of the object itself. In many pedestrian datasets tests it achieved good results as well.
KeywordsPedestrian detectionPixel gradient directionLocal colour self-similarity characterRegion edge histogramLocal binary patternsHough forest
收稿日期:2015-01-14。國家自然科學基金項目(61300170);安徽省自然科學基金項目(1308085MF95);安徽省級自然科學研究項目(TSKJ2014B11)。谷靈康,講師,主研領域:行人檢測,計算機視覺。周鳴爭,教授。
中圖分類號TP391.4
文獻標識碼A
DOI:10.3969/j.issn.1000-386x.2016.06.036
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54