一種有效的組合導航容錯濾波技術研究
2016-07-22 11:21:11祝小平
西北工業大學學報 2016年3期
關鍵詞:故障診斷
耿 峰, 祝小平,周 洲
1. 西安導航技術研究所,陜西西安710068; 2. 西北工業大學第365 研究所,陜西西安7100723. 西北工業大學航空學院,陜西西安710072
?
一種有效的組合導航容錯濾波技術研究
耿 峰1,2, 祝小平2,周 洲3
1. 西安導航技術研究所,陜西西安710068; 2. 西北工業大學第365 研究所,陜西西安7100723. 西北工業大學航空學院,陜西西安710072
摘要:為解決INS/多天線GNSS/MHS/DNS組合導航系統,一個或多個傳感器的導航信息出現錯誤,導致整個組合導航系統定位精度嚴重下降甚至無法定位的問題,提出一種多模式聯邦高斯和粒子容錯濾波技術,提高組合導航系統的魯棒性。該濾波技術基于無重置聯邦濾波結構,考慮到組合系統的非線性非高斯特性,局部濾波采用高斯和粒子濾波算法,以提高濾波精度,同時利用粒子似然函數方法,進行局部濾波器故障檢測并隔離,進而,根據檢測與隔離結果,進行全局濾波模式切換與全局最優估計,最終得到精確可靠的導航信息。仿真分析結果表明,多模式聯邦高斯和粒子容錯濾波技術是有效的,在多個子系統出現故障情況下,組合導航系統仍能提供精確的導航信息。
關鍵詞:導航;組合;容錯;故障診斷;傳感器
當前,越來越多的導航傳感器應用到了航空、航天、船舶等領域中,這也使得基于多傳感器的組合導航系統愈加完善。不過伴隨而來的是,組合導航系統的復雜性也隨之大為增加,這對系統的可靠性帶來了巨大考驗,特別是面對航空、航天、領域傳感器所處的惡劣工作環境。實際應用中,個別傳感器或子系統難免發生故障,而傳感器或子系統的故障往往會將錯誤的信號或測量信息帶入整個組合導航系統,從而導致系統的信息可靠性和精度大幅下降,嚴重情況下甚至會導致整個系統提供的信息失效、不可用。因此,非常有必要開展組合導航容錯系統相關技術研究,以保證系統測量精度的同時提高其可靠性。
組合導航系統多采用冗余的傳感器配置方案(諸如陀螺、加速度計)以及采用多種輔助導航系統(如GNSS、CNS、DNS、GNS、BPNS等),為容錯設計提供了硬件基礎。在組合導航系統信息融合研究方面,目前主要有集中式濾波、分散濾波、級聯式濾波以及聯邦濾波等4種比較成熟的融合技術,其中,聯邦濾波技術[1-2]克服了集中濾波技術計算量大、容錯性能差的不足,具有算法復雜程度低,容錯性和可靠性好,設計簡單靈活,便于工程實現等突出特點。
組合導航系統的故障檢測與隔離(FDI)技術是一項專門技術。目前,針對基于聯邦卡爾曼濾波的組合導航系統,常用的故障檢測方法有狀態χ2檢測法和殘差χ2檢測法[3]。狀態χ2檢測法利用2個狀態估計的差異對組合系統的故障進行檢驗。該檢測法對于軟故障和硬故障都有較好的檢測效果,但計算量比較大。殘差χ2檢測法利用信息序列作為估計量對組合系統進行故障檢測。該檢測法具有計算量較小的優點。但對于軟故障,檢測效果不是很理想。
近年來,非線性非高斯系統的故障診斷問題也成為熱點問題。對非線性非高斯系統的故障檢測相對比較困難,目前,還沒有最優的解決方法。梁軍等研究了基于SIR粒子濾波狀態估計和殘差平滑的故障檢測算法對于非線性非高斯系統的故障檢測取得了較好的效果[4]。葛哲學等提出了序貫式故障診斷策略,采用負對數似然比方法監控系統的運行狀態,故障發生后利用狀態聯合估計器進行故障隔離。該方法能實時檢測診斷出非線性系統的故障,同時能抑制非高斯噪聲的影響[5]。
為了提高INS/多天線GNSS/MHS/DNS組合導航系統的容錯能力,本文提出了一種多模式聯邦高斯和粒子容錯濾波技術。該技術基于聯邦濾波架構,在局部濾波器設計中,針對組合導航系統測量動態模型具有非線性和非高斯的特點,采用高斯和粒子濾波算法。與其他傳統的濾波算法比較,高斯和粒子濾波能夠很好地解決非線性濾波問題,并且不需要要求測量噪聲必須服從高斯分布這樣的制約條件。針對非線性非高斯系統的故障檢測問題,采用基于粒子似然函數的故障檢測方法。另外,針對故障傳感器的不同,專門設計不同的傳感器組合濾波模式,根據故障檢測和隔離結果,選擇適合的濾波模式,將重構的局部濾波結果,進行全局濾波,最終得到全局最優估計。
1多模式聯邦容錯濾波結構
多模式聯邦容錯濾波器由一個公共參考傳感器和若干個子傳感器構成,每個子傳感器的輸出與公共參考傳感器的輸出一起作為子濾波器(局部濾波器)的量測量,而每個子濾波器的濾波運算是平行的和不相關的,通過子濾波器,可獲得系統狀態的局部最優估計,如果各子濾波器沒有發生故障,那么,這些局部最優估計隨后在主濾波器中進行融合得到最優全局估計,如果個別子濾波器發生故障,則采用相應的故障檢測方法,進行故障檢測與隔離,并觸發對應的濾波模式切換邏輯,進行模式切換,重構局部濾波結果,然后,送入主濾波器進行全局濾波,最終到容錯后的全局最優估計。多模式聯邦容錯濾波器結構如圖1所示:
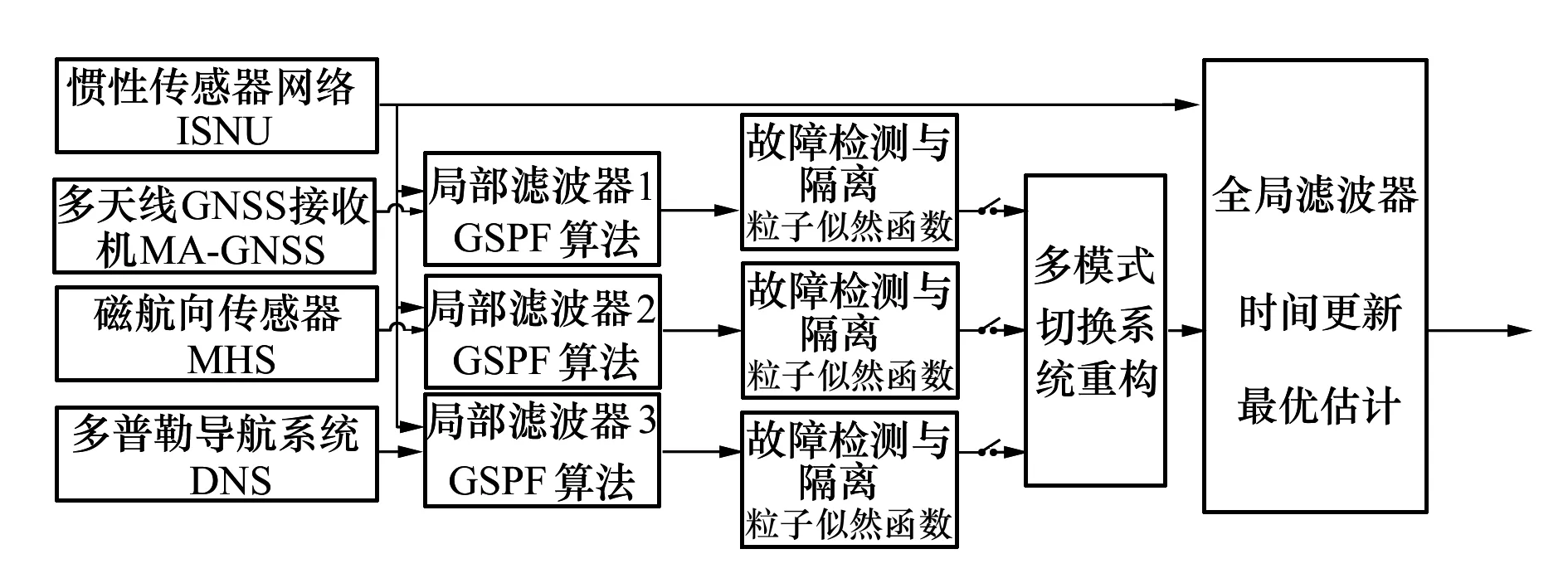
圖1 多模式聯邦容錯濾波器結構
采用慣性傳感器網絡單元(ISNU)作為公共參考傳感器。ISNU是一種基于集束傳感器技術的冗余IMU系統,其能夠最有效地利用由多傳感器提供的冗余測量信息,具有很高的可靠性。例如,一種由3個單自由度加速度計和3個單自由度陀螺儀組成,其幾何結構為正十二面體結構的慣性傳感器網絡單元平均無故障時間為0.95λ-1(假設每個加速度計和陀螺儀的故障率均相同且大小恒定不變),與通常的含3個正交配置陀螺儀的IMU平均無故障時間的比值為2.86,可以看出該慣性傳感器網絡的可靠性大幅提高。
由于組合導航系統中存在一定的非線性環節,比如在 GNSS/慣性組合模式中,偽距觀測方程為非線性的,此外,測量噪聲還服從非高斯分布,是一典型的非線性非高斯系統,因此,傳統的聯邦卡爾曼濾波技術無法取得令人滿意的濾波精度。針對這一非線性非高斯系統,本文在聯邦濾波器局部濾波中,采用基于高斯和的粒子濾波技術,并且采用粒子似然函數方法進行傳感器子系統故障檢測。
2多模式聯邦高斯和粒子容錯濾波算法
2.1正規化濾波器測量方程[6]
2.1.1正規化位置和速度偏差方程
如果可得到多天線GNSS(MA-GNSS)接收機提供的導航狀態量,數據融合濾波器的正規化測量方程如下:
1) 位置偏差方程
(1)
2) 速度偏差方程
(2)

多普勒導航系統(DNS)是一種機載自治航位推算系統。多普勒雷達(DR)安裝在載體的正下方,通過測量從地面返回的雷達波束信號的多普勒頻移,能夠獲得載體相對于地面的速度矢量。多普勒導航方程如下
(3)

INS和多普勒雷達得到的速度之間的偏差方程正規化形式如下
(4)
2.1.2正規化姿態偏差方程
當MA-GNSS接收機和其它傳感器系統能夠提供載體的姿態信息時,姿態偏差方程的正規化形式如下
(5)
式中,θAided為由MA-GNSS或其它姿態測量系統提供的歐拉角,θINS為由INS提供的歐拉角,νAtt為姿態測量噪聲。Ttilt-θ為傾斜角到歐拉角的轉換矩陣,表示如下
(6)
對于磁航向傳感器(magneticheadingsensor,MHS)來說,其相應的測量方程如下
(7)
式中,bM為磁航向偏差量,νM為測量噪聲。bM可由一個隨機常量外加一階馬爾科夫過程表征。
2.2時間統一
確定分段時間間隔Ts。為避免分段時間間隔內無測量數據的情況出現,Ts不小于相應傳感器的最大采樣周期,故取Ts=Tmax。
劃分重疊區間TΔ,如下
(8)

(9)
二次型誤差函數為
(10)
求導得
(11)
(12)

2.3子濾波器濾波算法
組合導航系統的動態狀態空間模型(DSS)為非線性非高斯系統,其中,非線性主要體現觀測方程的非線性上,非高斯則主要是模型測量噪聲服從非高斯分布。為了取得滿意的濾波精度,在局部濾波中,采用高斯和粒子濾波算法。
高斯和粒子濾波算法[7-9]是一種非線性濾波算法,利用有限高斯密度的加權求和來近似非高斯概率密度,并利用粒子濾波中的粒子及其權值,最終求得各高斯密度的均值和方差的估計值。
動態狀態空間模型描述如下
(13)
式中,un和νn為非高斯噪聲。到時刻n的信號和觀測量分別被記作x0:n和y0:n,x0:n={0,…,xn},y0:n={0,…,yn}。
2.3.1時間更新
假設n-1時刻,有先驗概率密度函數為
(14)

(15)
而條件轉移密度的高斯和分布形式如下
(16)
則,預測分布(預測密度函數)可描述為
(17)
由
(18)
可得到時間更新的預測密度函數為
(19)
定義i=j+(k-1)K,那么,j=1,…,G,k=1,…,K,i=1,…,GK。時間更新算法如下:


(20)
(21)
④對于j=1,…,G,k=1,…,K以及i=1,…,GK,其中,i=j+(k-1)K,根據下式更新權重。
(22)
2.3.2測量更新
假設n時刻,有預測分布
(23)
則,濾波分布可表示為
(24)
測量更新算法如下:
②對于j=1,…,M,i=1,…,GK,計算權重
(25)
③對于i=1,…,GK,估計每個高斯分布的均值和協方差
(26)
(27)
④對于i=1,…,GK,更新每個高斯分布的權重,并歸一化
(28)

2.4主濾波器濾波算法
主濾波器將各個子濾波器的局部估計值信息進行融合,得到全局的最優估計值和最優估計方差陣。
(29)
2.5故障檢測與隔離
針對子濾波器非線性動態特性,故障檢測采用基于粒子似然函數的故障檢測方法。即就是,當傳感器工作正常時,各粒子的似然函數均值較高,而當發生故障時,各粒子的似然函數均值較小,將粒子的似然函數平均值的對數和當作表征故障的殘差值,當該殘差值大于預設閾值時,則認為傳感器發生故障,反之,認為傳感器無故障。具體過程如下:
②求全部粒子的似然函數平均值Lni;
(30)
③求最近K個時刻內Lni的對數和dni;
(31)
④如果dni小于閾值,則判斷未發生故障,否則判斷發生故障。
若判斷出所有子系統無故障,則把濾波值送至主濾波器;若某個子系統故障,則對其隔離。
2.6多模式切換與系統重構
通過故障檢測與隔離,若某個子系統出現故障,則立即對其進行隔離,同時啟動模式切換邏輯,選擇對應的組合濾波模式,對系統進行重構,將重構后的局部濾波估計結果送入主濾波器進而得到最終的全局最優估計結果。切換模式如表1所示。
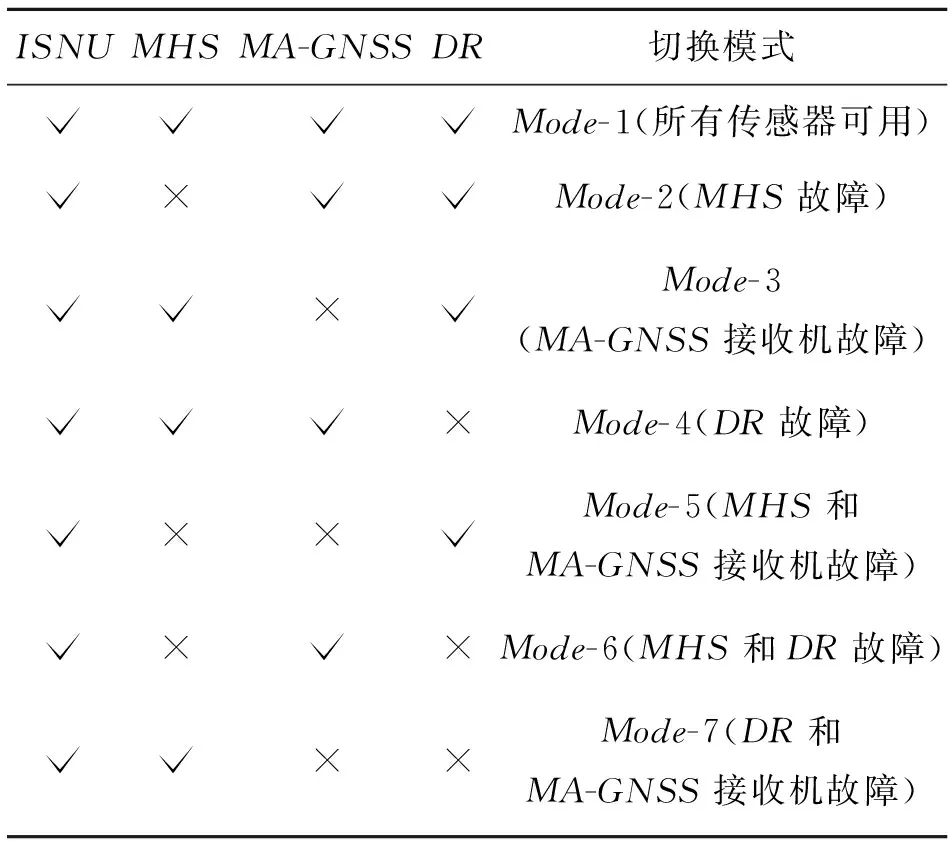
表1 可供切換的模式
3仿真驗證與分析
仿真時間取2 400s,子濾波器粒子濾波采樣樣本數為6 000,載體運行軌跡如圖2所示,由平飛、爬升和轉彎等狀態組成。載體初始位置為東經118°、北緯 32°、高度1 000m,初始速度為280m/s。
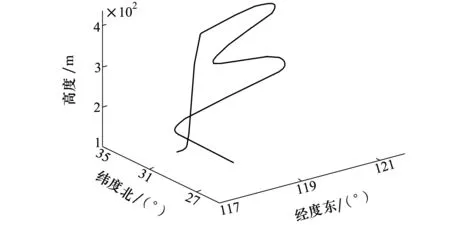
圖2 載體運行軌跡
INS/MA-GNSS/MHS/DNS組合導航系統仿真參數設置如表2所示。ISNU輸出頻率為50Hz,MA-GNSS接收機輸出頻率為5Hz、MHS和DR輸出頻率均為1Hz。
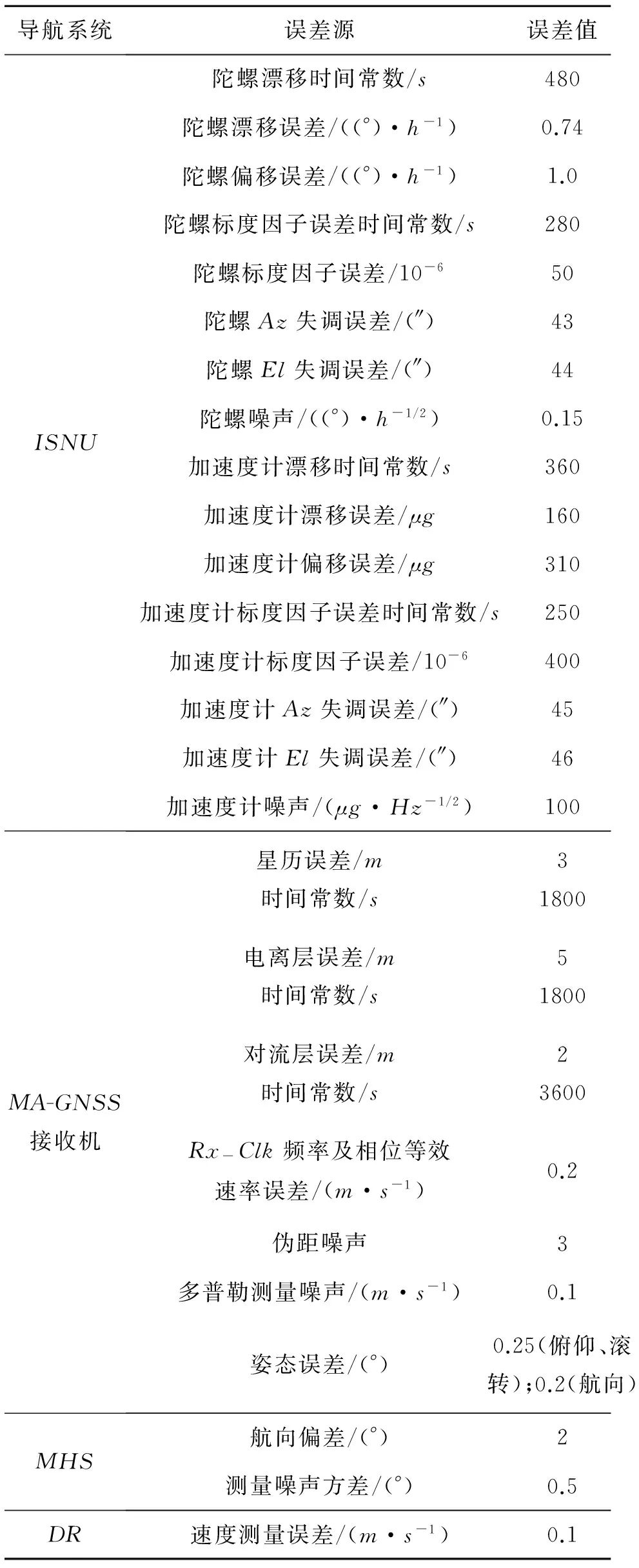
表2 組合導航系統仿真參數設置
上述所有誤差參數的動力學模型為由隨機常數過程、隨機游動過程以及一階非高斯馬爾可夫隨機過程組成的聯合隨機過程。
在仿真中,設置2種類型的故障分別為突變故障(硬故障)和慢變故障(軟故障)。突變故障設置為階躍型常值偏置,慢變故障設置為斜坡信號或拋物線信號,各子系統的故障設置如表3所示。
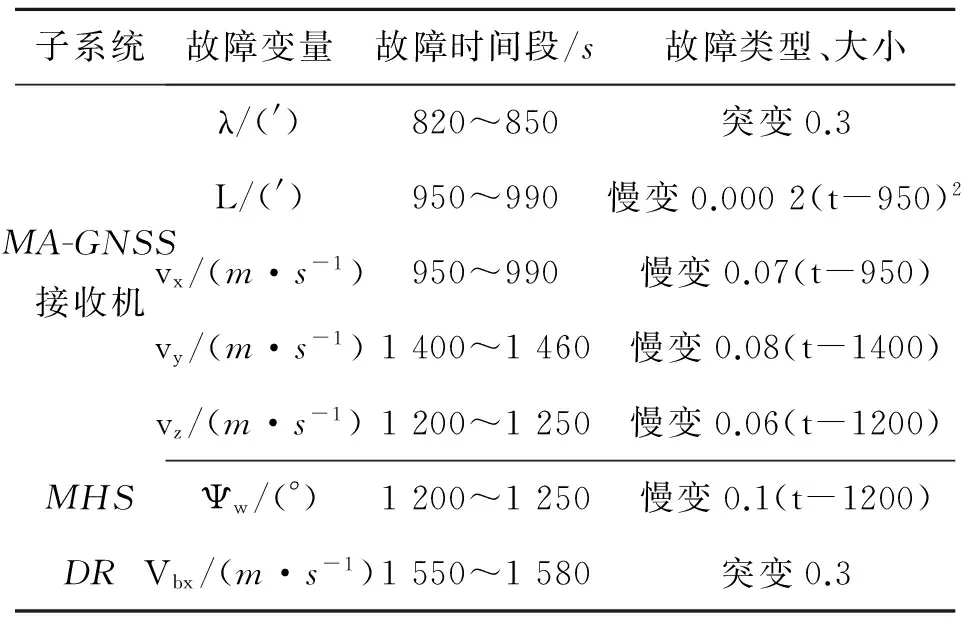
表3 各子系統的故障設置
主濾波器濾波結果如圖3~圖5所示。各子系統無故障、各子系統發生故障(見表3)但不進行故障檢測隔離以及各子系統發生故障并進行故障檢測隔離與重構等3種情況下,全局濾波誤差統計結果見表4。
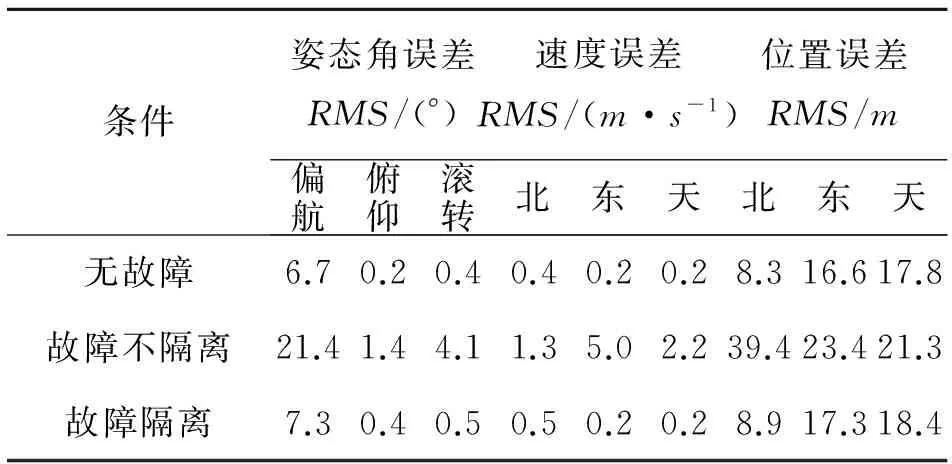
表4 全局濾波誤差統計結果
從仿真結果可以看出,各子系統無故障時,全局濾波具有較高的精度,證明對于非線性非高斯系統,高斯和粒子濾波算法擁有很好的濾波性能;當各子系統發生如表3所示故障時,不進行故障的檢測與隔離,全局濾波精度大幅下降,而引入粒子濾波似然函數故障檢測方法進行故障檢測、隔離以及重構后,主濾波器濾波精度與子系統無故障時的濾波精度相當,證明粒子濾波似然函數故障檢測方法是有效的。
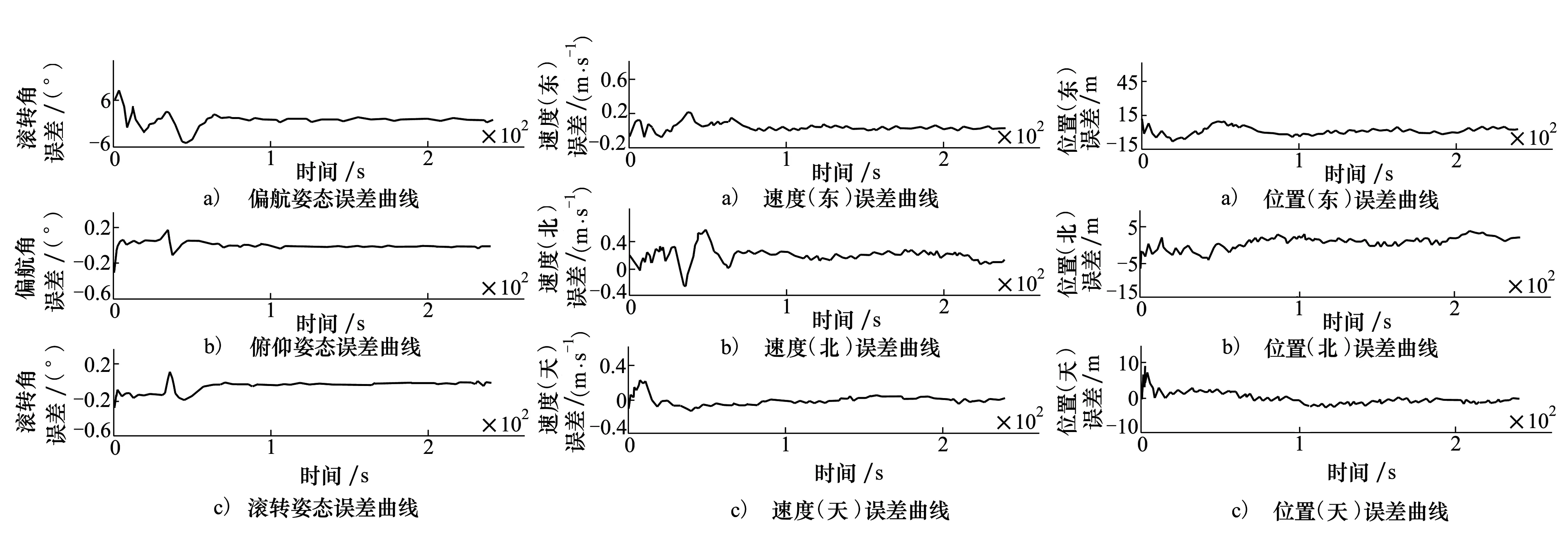
圖3 主濾波器全局最優估計(姿態誤差) 圖4 主濾波器全局最優估計(速度誤差) 圖5 主濾波器全局最優估計(位置誤差)
4結論
針對INS/多天線GNSS/MHS/DNS組合導航系統中,一個或多個傳感器導航信息出現錯誤,導致整個組合導航系統定位精度嚴重下降甚至無法定位的問題,本文提出了一種多模式聯邦高斯和粒子容錯濾波技術。針對組合導航系統測量動態模型具有非線性和非高斯的特點,局部濾波采用了高斯和粒子濾波算法。與其他傳統的濾波算法比較,高斯和粒子濾波能夠很好地解決非線性濾波問題,并且不需要要求測量噪聲必須服從高斯分布這樣的制約條件。考慮到組合系統的非線性非高斯特性,現有的基于卡爾曼濾波器的故障檢測方法已不再適用,針對這一問題,采用了基于粒子似然函數的故障檢測方法。此外,針對不同的故障傳感器,專門設計了不同的組合濾波模式,根據故障檢測和隔離結果,選擇適合的濾波模式,重構局部濾波結果,并在主濾波器中,進行全局濾波,最終獲得全局最優估計。通過仿真分析,結果表明本文提出的多模式聯邦高斯和粒子容錯濾波技術是有效可行的。采用該技術,在各傳感器子系統相繼出現故障的情況下,INS/多天線GNSS/MHS/DNS組合導航系統仍然能夠給出較高精度的導航信息。
參考文獻:
[1]MaierA,KieselS,TrommerGF.PerformanceAnalysisofFederatedFilterforSAR/TRN/GPS/INSIntegration[J].GyroscopyandNavigation, 2011, 2(4): 293-300
[2]KazeronniM,KhayatianA.AMWPCA-BasedFaultDetectioninFederatednoResetModeFilter[C]∥Proceedingsof2012 20thIranianConferenceonElectricalEngineering,Piscataway,NY:IEEE, 2012:851-856
[3]趙琳, 班鏡超. 組合導航聯邦濾波故障檢測技術研究[J]. 遙測遙控, 2014, 35(2): 9-13
ZhaoLin,BanJingchao.FederatedFilterFaultDetectionTechnologyResearchforIntegratedNavigation[J].JournalofTelemetry,TrackingandCommand, 2014, 35(2): 9-13 (inChinese)
[4]梁軍,喬立巖,彭喜元. 基于SIR粒子濾波狀態估計和殘差平滑的故障檢測算法[J]. 電子學報,2007, 35(12A): 32-38
LiangJun,QiaoLiyan,PengXiyuan.FaultDetectionBasedonSIRStateEstimationandSmoothedResidual[J].ActaElectronicaSinica, 2007, 35(12A): 32-38 (inChinese)
[5]葛哲學,楊擁民,胡政,等. 非高斯噪聲下基于Unscented粒子濾波器的非線性系統故障診斷方法[J]. 兵工學報,2007, 28(3): 332-335
GeZhexue,YangYongmin,HuZheng,etal.UnscentedParticleFilter-BasedFaultDiagnosisofNon-LinearSystemwithNon-GaussianNoises[J].ActaArmamentarii, 2007, 28(3): 332-335 (inChinese)
[6]HuaminJia.DataFusionMethodologiesforMultisensorAircraftNavigationSystems[D].CranfieldUniversity, 2004
[7]KotechaJH,DjuricPM.GaussianSumParticleFiltering[J].IEEETransonSignalProcessing, 2003, 51(10): 2602-2612
[8]LyudmilaMihaylova,AndreasHegyi,AmadouGning,etal.ParallelizedParticleandGaussianSumParticleFiltersforLarge-ScaleFreewayTrafficSystems[J].IEEETransonIntelligentTransportationSystems, 2012, 13(1): 36-48
[9]PedrosaP,DinisR,NunesF,etal.PhaseNoiseEstimationforM-QAMConstellationsUsingGaussianSumParticleFiltering[C]∥IEEE79thVehicularTechnologyConference(VTCSpring), 2014:1-5
收稿日期:2015-10-27
作者簡介:耿峰(1977—),西安導航技術研究所高級工程師,主要從事導航、制導與控制的研究。
中圖分類號:V249
文獻標志碼:A
文章編號:1000-2758(2016)03-0449-07
Research on an Effective Integrated Navigation Failure-Tolerance Filtering Technology
Geng Feng1,2, Zhu Xiaoping2, Zhou Zhou3
1.Xi′an Research Institute of Navigation Technology, Xi′an 710068, China 2.365thResearch Institute, Northwestern Polytechnical University, Xi′an 710072, China 3.College of Aeronautics, Northwestern Polytechnical University, Xi′an 710072, China
Abstract:For an INS/multi-antenna GNSS/MHS/DNS integrated navigation system, the navigation information errors of one or more sensors may cause the positioning accuracy of the entire integrated navigation system in serious decline, and even could not make the system work as usual. In order to solve this problem, a multi-mode federated Gaussian sum particle fault-tolerant filtering technology is proposed. It adopts a no reset federated filter framework, and in the locally filtering, a Gaussian sum particle filter algorithm is utilized to improve the precision of filtering for nonlinear and non Gaussian system, meanwhile, a particle likelihood function failure detection algorithm is used to detect and isolate failure sensors. The simulation studies presented here show that the proposed multi-mode federated Gaussian sum particle fault-tolerant filtering technology is feasible, and the designed multi-mode integrated navigation filter can achieve sufficient reliability and accuracy.
Keywords:navigation, integration, fault tolerance, fault detection, sensors
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00