機(jī)動(dòng)目標(biāo)的IMM擴(kuò)展卡爾曼濾波時(shí)間配準(zhǔn)算法
2016-07-25 02:38:22高穎韓宏帥武夢(mèng)潔王永庭
西北工業(yè)大學(xué)學(xué)報(bào) 2016年4期
高穎, 韓宏帥, 武夢(mèng)潔, 王永庭
(1.西北工業(yè)大學(xué) 航海學(xué)院, 陜西 西安 710072; 2.光電控制技術(shù)重點(diǎn)實(shí)驗(yàn)室, 河南 洛陽(yáng) 471009)
?
機(jī)動(dòng)目標(biāo)的IMM擴(kuò)展卡爾曼濾波時(shí)間配準(zhǔn)算法
高穎1,2, 韓宏帥1, 武夢(mèng)潔2, 王永庭2
(1.西北工業(yè)大學(xué) 航海學(xué)院, 陜西 西安710072; 2.光電控制技術(shù)重點(diǎn)實(shí)驗(yàn)室, 河南 洛陽(yáng)471009)
摘要:針對(duì)目前研究的時(shí)間配準(zhǔn)方法是在目標(biāo)運(yùn)動(dòng)模型已知的情況下進(jìn)行時(shí)間配準(zhǔn),難以保證目標(biāo)在復(fù)雜機(jī)動(dòng)情況下運(yùn)動(dòng)模型多變時(shí)的時(shí)間配準(zhǔn)精度。提出了機(jī)動(dòng)目標(biāo)的交互多模型擴(kuò)展卡爾曼濾波(IMM-EKF)時(shí)間配準(zhǔn)算法,該算法將交互多模型中的每個(gè)運(yùn)動(dòng)模型分別進(jìn)行擴(kuò)展卡爾曼濾波輸出同時(shí)根據(jù)濾波過(guò)程中得到的殘差計(jì)算每個(gè)模型的概率,根據(jù)模型概率和各模型濾波輸出得到時(shí)間配準(zhǔn)周期內(nèi)最后一個(gè)采樣點(diǎn)的測(cè)量數(shù)據(jù),利用該點(diǎn)的狀態(tài)和模型概率進(jìn)行外推就得到時(shí)間配準(zhǔn)周期和傳感器采樣周期不成整數(shù)比時(shí)配準(zhǔn)時(shí)刻的位置。通過(guò)仿真結(jié)果表明該算法能夠有效降低整體的時(shí)間配準(zhǔn)誤差。該算法提高了時(shí)間配準(zhǔn)的精度,為數(shù)據(jù)融合提供了良好的基礎(chǔ)。
關(guān)鍵詞:信息融合;交互多模型;擴(kuò)展卡爾曼濾波;時(shí)間配準(zhǔn)
在多傳感器信息融合系統(tǒng)中,綜合使用多個(gè)傳感器的觀測(cè)值,能夠更加有效地對(duì)目標(biāo)的位置和速度信息進(jìn)行精確估計(jì)[1]。由于傳感器的采樣頻率、傳感器測(cè)量誤差、采樣起始時(shí)間的不同以及數(shù)據(jù)鏈傳輸數(shù)據(jù)的時(shí)延不同,所以在進(jìn)行融合處理前必須將這些數(shù)據(jù)同步到相同的時(shí)刻上,即進(jìn)行時(shí)間配準(zhǔn)。時(shí)間配準(zhǔn)過(guò)程就是在已有數(shù)據(jù)基礎(chǔ)上產(chǎn)生配準(zhǔn)時(shí)刻的數(shù)據(jù)。若融合時(shí)直接使用未經(jīng)過(guò)時(shí)間配準(zhǔn)的數(shù)據(jù)進(jìn)行融合,可能會(huì)導(dǎo)致融合輸出的結(jié)果比單獨(dú)使用某一傳感器的數(shù)據(jù)還要差,因此,在多傳感器信息融合處理前必須考慮時(shí)間配準(zhǔn)問(wèn)題[2],對(duì)多傳感器探測(cè)數(shù)據(jù)進(jìn)行時(shí)間配準(zhǔn)處理精度直接關(guān)系到信息融合的最終效果。
目前常用的時(shí)間配準(zhǔn)方法主要包括內(nèi)插外推法、濾波方法、曲線擬合法、最小二乘法等,各算法都有其優(yōu)缺點(diǎn)。文獻(xiàn)[3]中的內(nèi)插外推法是一種較常用的方法,采用三點(diǎn)插值法或拉格朗日插值法,將配準(zhǔn)時(shí)刻定為插值點(diǎn),從而得到配準(zhǔn)時(shí)刻的數(shù)據(jù),實(shí)現(xiàn)時(shí)間配準(zhǔn),但是根據(jù)插值法的算法原理,為了保證較高的插值精度,插值數(shù)據(jù)應(yīng)處在插值區(qū)間中部,因此該算法用于事后處理效果較好,但無(wú)法滿(mǎn)足機(jī)動(dòng)目標(biāo)配準(zhǔn)的精確性要求。在解決時(shí)間配準(zhǔn)問(wèn)題時(shí),濾波的方法也被應(yīng)用時(shí)間配準(zhǔn)中,其中文獻(xiàn)[4]采用EKF算法對(duì)目標(biāo)進(jìn)行精確時(shí)間配準(zhǔn)是一種較好的時(shí)間配準(zhǔn)方法,但是該算法的濾波過(guò)程是在假設(shè)目標(biāo)運(yùn)動(dòng)模型為勻速直線運(yùn)動(dòng)模型、勻加速直線運(yùn)動(dòng)和勻速圓周運(yùn)動(dòng)單個(gè)運(yùn)動(dòng)模型的基礎(chǔ)之上進(jìn)行準(zhǔn)確時(shí)間配準(zhǔn)的,但是實(shí)際機(jī)動(dòng)目標(biāo)的運(yùn)動(dòng)模型未知且是復(fù)雜多變的,若運(yùn)動(dòng)模型失配,則該濾波算法的配準(zhǔn)精度急劇下降;文獻(xiàn)[5]采用UKF算法同時(shí)對(duì)時(shí)間和空間進(jìn)行配準(zhǔn),該方法不失為一次較好的嘗試,但其推導(dǎo)過(guò)程是基于目標(biāo)勻速運(yùn)動(dòng)的假設(shè),也是在模型已知的基礎(chǔ)上進(jìn)行時(shí)間配準(zhǔn),若運(yùn)動(dòng)模型失配,則時(shí)間配準(zhǔn)精度降低。文獻(xiàn)[6-7]中曲線擬合算法根據(jù)一段區(qū)間內(nèi)的采樣數(shù)據(jù),由最小二乘準(zhǔn)則擬合出一條以時(shí)間為變量的多項(xiàng)式曲線,從而得到配準(zhǔn)時(shí)刻的數(shù)據(jù),實(shí)現(xiàn)時(shí)間配準(zhǔn),但是當(dāng)配準(zhǔn)時(shí)刻在擬合曲線的端點(diǎn)處時(shí)存在發(fā)散現(xiàn)象,導(dǎo)致時(shí)間配準(zhǔn)的精度在端點(diǎn)處急劇下降,而且該算法同樣無(wú)法解決時(shí)間配準(zhǔn)的準(zhǔn)確性問(wèn)題。文獻(xiàn)[8]對(duì)曲線擬合的方法進(jìn)行了改進(jìn),提出了自適應(yīng)變長(zhǎng)滑窗曲線擬合時(shí)間配準(zhǔn)算法,該算法在大時(shí)延、目標(biāo)大機(jī)動(dòng)條件下仍然具有較好的可靠性,但是若傳感器的數(shù)據(jù)采樣周期和時(shí)間配準(zhǔn)周期相差不大時(shí),就無(wú)法采用該算法進(jìn)行時(shí)間配準(zhǔn),因此限制了此算法的應(yīng)用范圍。文獻(xiàn)[9]提出了多模型最小二乘算法,該算法解決了時(shí)間配準(zhǔn)周期與傳感器采樣周期比為非整數(shù)這一問(wèn)題,但是該算法也是在運(yùn)動(dòng)模型已知的情況下進(jìn)行外推得到配準(zhǔn)時(shí)刻的值,不適用于機(jī)動(dòng)或復(fù)雜運(yùn)動(dòng)模型時(shí)的時(shí)間配準(zhǔn)精度。文獻(xiàn)[10]提出了基于機(jī)動(dòng)檢測(cè)的自適應(yīng)時(shí)間配準(zhǔn)算法,由于數(shù)據(jù)存在濾波誤差,自適應(yīng)算法的門(mén)限判斷并不能保證完全準(zhǔn)確切換為目標(biāo)當(dāng)前的運(yùn)動(dòng)模型,此外目標(biāo)機(jī)動(dòng)時(shí)濾波結(jié)果與真實(shí)值相比存在一定的滯后性,再加上自適應(yīng)算法需要對(duì)兩點(diǎn)數(shù)據(jù)進(jìn)行差分以計(jì)算目標(biāo)的加速度,這都給該配準(zhǔn)算法的實(shí)時(shí)切換帶來(lái)影響,進(jìn)而影響時(shí)間配準(zhǔn)的準(zhǔn)確性。在機(jī)動(dòng)目標(biāo)的跟蹤中,交互多模型等機(jī)動(dòng)跟蹤算法[11],實(shí)現(xiàn)對(duì)機(jī)動(dòng)目標(biāo)的穩(wěn)定跟蹤,文獻(xiàn)[12-13]把交互多模型運(yùn)用到機(jī)動(dòng)跟蹤算法中,由于使用了交互多模型算法,機(jī)動(dòng)目標(biāo)的跟蹤精度有了較大提高,這主要是因?yàn)榻换ザ嗄P退惴▽?duì)機(jī)動(dòng)目標(biāo)運(yùn)動(dòng)模型的精確估計(jì),所以利用交互多模型的方法來(lái)解決時(shí)間配準(zhǔn)過(guò)程中模型失配的問(wèn)題。
針對(duì)機(jī)動(dòng)目標(biāo)時(shí)間配準(zhǔn)中的運(yùn)動(dòng)模型失配導(dǎo)致配準(zhǔn)精度降低的問(wèn)題,根據(jù)交互多模型算法對(duì)機(jī)動(dòng)目標(biāo)運(yùn)動(dòng)模型的準(zhǔn)確估計(jì)和擴(kuò)展卡爾曼濾波在時(shí)間配準(zhǔn)上可濾除由于雷達(dá)傳感器引入的隨機(jī)噪聲,在交互多模型算法和擴(kuò)展卡爾曼濾波算法的基礎(chǔ)上提出了交互多模型擴(kuò)展卡爾曼濾波時(shí)間配準(zhǔn)算法,該算法中由多個(gè)運(yùn)動(dòng)模型組成,通過(guò)對(duì)多個(gè)運(yùn)動(dòng)模型進(jìn)行濾波并根據(jù)模型概率將這些濾波結(jié)果融合輸出,得到距配準(zhǔn)時(shí)刻最近采樣點(diǎn)的濾波輸出,然后根據(jù)該點(diǎn)狀態(tài)和該點(diǎn)到配準(zhǔn)時(shí)刻的時(shí)間間隔外推求解時(shí)間配準(zhǔn)周期和傳感器采樣周期不成整數(shù)比時(shí)時(shí)間配準(zhǔn)時(shí)刻的位置。
1基于IMM-EKF的時(shí)間配準(zhǔn)算法
1.1整數(shù)周期比條件下IMM-EKF時(shí)間配準(zhǔn)
交互式多模型算法利用模型的轉(zhuǎn)移和多個(gè)模型的組合對(duì)機(jī)動(dòng)目標(biāo)的狀態(tài)進(jìn)行估計(jì),通過(guò)選取或設(shè)計(jì)一個(gè)模型集來(lái)描述目標(biāo)系統(tǒng)的行為模式,其中每個(gè)模型與系統(tǒng)的一個(gè)特定模式相匹配;然后基于每一個(gè)模型的濾波器并行濾波,通過(guò)EKF濾除測(cè)量過(guò)程中的隨機(jī)誤差以此來(lái)提高測(cè)量數(shù)據(jù)的精度,利用每個(gè)濾波器輸出的殘差以及各模型的先驗(yàn)概率密度,得出當(dāng)前時(shí)刻與模型匹配的模型概率,系統(tǒng)最終的測(cè)量數(shù)據(jù)就是各模型濾波器輸出的概率加權(quán)融合。算法流程如圖1所示。

圖1 交互多模型算法流程
該算法假設(shè)配準(zhǔn)周期為T(mén),傳感器的采樣周期為τ,配準(zhǔn)周期與傳感器的采樣周期成整數(shù)比,所以T=nτ。
假定有r個(gè)模型
(1)
式中,Fi是由運(yùn)動(dòng)模型而確定的狀態(tài)轉(zhuǎn)移矩陣,wi(k)是均值為零、協(xié)方差矩陣為Q的白噪聲序列。
測(cè)量模型為

(2)
由圖1可知,IMM-EKF算法主要包括四個(gè)步驟:①輸入交互;②各模型擴(kuò)展卡爾曼濾波;③模型概率更新;④交互輸出。具體內(nèi)容如下:
1) 輸入交互
(3)
(4)
(5)
(6)
2) 各模型擴(kuò)展卡爾曼濾波
根據(jù)輸入交互及k時(shí)刻的量測(cè)數(shù)據(jù)Zk,對(duì)各個(gè)模型進(jìn)行擴(kuò)展卡爾曼濾波。
預(yù)測(cè):
(7)
卡爾曼濾波增益
(8)
狀態(tài)估計(jì)更新
(9)
狀態(tài)協(xié)方差陣更新
(10)
(11)
(12)
3) 模型概率更新
模型概率更新方程為
(13)
(14)
(15)
4) 交互輸出
(16)
1.2非整數(shù)周期比條件下IMM-EKF時(shí)間配準(zhǔn)
若配準(zhǔn)周期與傳感器的采樣周期比不是整數(shù)倍時(shí),即T=nτ+ε,其中,n是一個(gè)配準(zhǔn)周期內(nèi)的n個(gè)采樣點(diǎn),ε為一個(gè)配準(zhǔn)周期內(nèi)最后一個(gè)采樣點(diǎn)到配準(zhǔn)時(shí)刻的時(shí)間間隔。其具體情形如圖2所示。

圖2 非整數(shù)周期比條件下IMM-EKF時(shí)間配準(zhǔn)

(17)
(18)

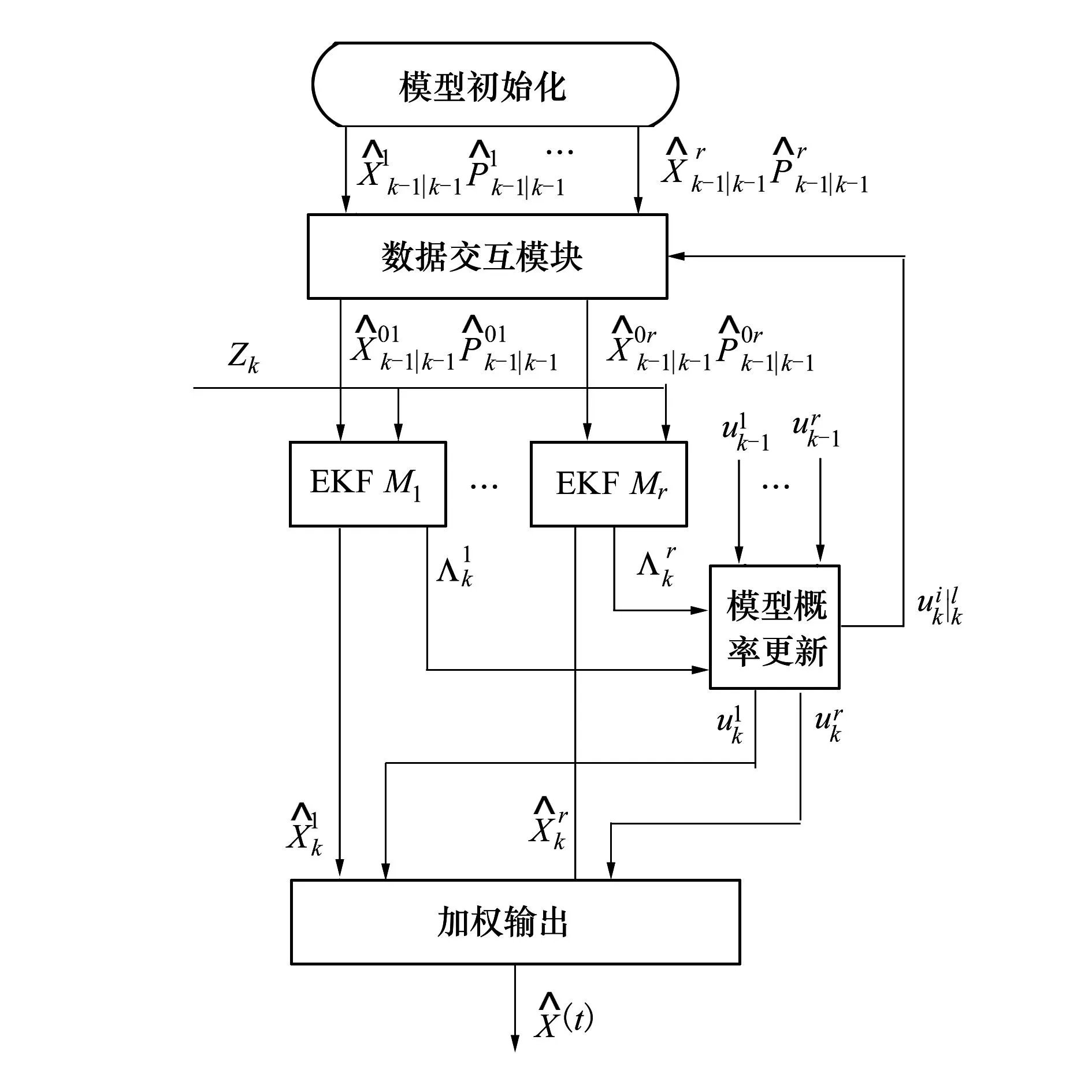
圖3 非整數(shù)周期比條件下配準(zhǔn)算法流程
2仿真結(jié)果和分析
為了驗(yàn)證本文所述算法的有效性,將該IMM-EKF算法和勻速(CA)、勻加速(CV)模型下的EKF算法進(jìn)行了一組仿真對(duì)比實(shí)驗(yàn), IMM-EKF算法中的模型為勻速和勻加速運(yùn)動(dòng)模型。仿真實(shí)驗(yàn)假設(shè)目標(biāo)在X-Y平面上做蛇形機(jī)動(dòng),初始位置為(200m,150m),仿真時(shí)間設(shè)為100s,機(jī)動(dòng)目標(biāo)的實(shí)際運(yùn)動(dòng)軌跡如圖4所示。

圖4 機(jī)動(dòng)目標(biāo)的運(yùn)動(dòng)軌跡
雷達(dá)的測(cè)距誤差為30m。假設(shè)雷達(dá)傳感器位于坐標(biāo)原點(diǎn),其中在交互多模型中,多模型由勻速(CA)、勻加速(CV)2個(gè)運(yùn)動(dòng)模型組成,這2個(gè)模型在IMM-EKF中對(duì)應(yīng)的狀態(tài)轉(zhuǎn)移矩陣F1、F2為:
(19)
(20)
在仿真實(shí)驗(yàn)中,蒙特卡洛仿真次數(shù)M為50次,以位置估計(jì)均方根誤差(RMSE)作為目標(biāo)跟蹤性能的比較依據(jù),表達(dá)式如下
(21)
(22)

1) 雷達(dá)傳感器采樣周期與時(shí)間配準(zhǔn)周期成整數(shù)比時(shí),當(dāng)雷達(dá)傳感器的采樣周期為0.15s,時(shí)間配準(zhǔn)周期為0.9s時(shí),CV、CA模型和IMM3種情況下的時(shí)間配準(zhǔn)仿真實(shí)驗(yàn)結(jié)果如圖4所示,在配準(zhǔn)時(shí)刻位置估計(jì)的均方根誤差均值如表1所示。

圖5 時(shí)間配準(zhǔn)算法性能比較

配準(zhǔn)方法時(shí)間配準(zhǔn)的均方根誤差均值/mX方向誤差Y方向誤差CV-EKF27.03626.016CA-EKF15.20815.904IMM-EKF7.8577.885
由圖5和表1當(dāng)雷達(dá)傳感器的采樣周期和時(shí)間配準(zhǔn)周期成整數(shù)比,IMM-EKF時(shí)間配準(zhǔn)算法明顯優(yōu)于單個(gè)CV、CA模型的時(shí)間配準(zhǔn)精度,表明IMM-EKF時(shí)間配準(zhǔn)算法的時(shí)間配準(zhǔn)精度優(yōu)于單模型下的時(shí)間配準(zhǔn)精度。
2) 雷達(dá)傳感器采樣周期與時(shí)間配準(zhǔn)周期不成整數(shù)比時(shí),以上仿真參數(shù)不變,雷達(dá)傳感器的采樣周期為0.15 s,時(shí)間配準(zhǔn)周期為1 s時(shí),CV、CA模型和IMM 3種情況下的時(shí)間配準(zhǔn)仿真實(shí)驗(yàn)結(jié)果如圖6所示,在配準(zhǔn)時(shí)刻位置估計(jì)的均方根誤差均值如表2所示。

圖6 時(shí)間配準(zhǔn)算法性能比較

配準(zhǔn)方法時(shí)間配準(zhǔn)的均方根誤差均值/mX方向誤差Y方向誤差CV-EKF24.12224.237CA-EKF11.32512.904IMM-EKF5.7435.858
從圖6及表2中的仿真結(jié)果可以看出:IMM-EKF的時(shí)間配準(zhǔn)精度優(yōu)于單個(gè)CV、CA模型下的EKF時(shí)間配準(zhǔn)精度。單個(gè)CV、CA模型下的EKF時(shí)間配準(zhǔn)算法在對(duì)機(jī)動(dòng)目標(biāo)進(jìn)行時(shí)間配準(zhǔn)是由于運(yùn)動(dòng)模型失配,導(dǎo)致配準(zhǔn)誤差逐增大,所以單個(gè)運(yùn)動(dòng)模型下的EKF時(shí)間配準(zhǔn)算法無(wú)法保證目標(biāo)在復(fù)雜機(jī)動(dòng)條件時(shí)間配準(zhǔn)的精度。而IMM-EKF時(shí)間配準(zhǔn)算法由于其利用了交互多模型算法,將每個(gè)模型與對(duì)應(yīng)的濾波器進(jìn)行濾波輸出并根據(jù)殘差計(jì)算每個(gè)模型的概率從而能夠精確估計(jì)距配準(zhǔn)時(shí)刻最近采樣點(diǎn)的狀態(tài),然后就能正確外推出配準(zhǔn)時(shí)刻的位置,從而提高了時(shí)間配準(zhǔn)算法的精度。
3結(jié)論
針對(duì)傳統(tǒng)時(shí)間配準(zhǔn)算法在運(yùn)動(dòng)模型失配時(shí)配準(zhǔn)精度下降問(wèn)題,將交互多模型(IMM)算法和擴(kuò)展卡爾曼濾波相結(jié)合,提出了交互多模型擴(kuò)展卡爾曼濾波(IMM-EKF)時(shí)間配準(zhǔn)算法,通過(guò)仿真驗(yàn)證該算法明顯優(yōu)于傳統(tǒng)單模型的擴(kuò)展卡爾曼濾波(EKF),解決了機(jī)動(dòng)目標(biāo)時(shí)間配準(zhǔn)過(guò)程中的模型失配問(wèn)題。另外,將單模型擴(kuò)展卡爾曼濾波擴(kuò)展到多模型,解決了復(fù)雜機(jī)動(dòng)目標(biāo)的時(shí)間配準(zhǔn)問(wèn)題,提高時(shí)間配準(zhǔn)的精度。所以該算法能夠根據(jù)傳感器的觀測(cè)值精確估計(jì)機(jī)動(dòng)目標(biāo)在配準(zhǔn)時(shí)刻運(yùn)動(dòng)的位置,具有廣泛的實(shí)用價(jià)值。
參考文獻(xiàn):
[1]胡國(guó)平,張守宏. 多傳感器協(xié)同探測(cè)目標(biāo)的分類(lèi)識(shí)別研究[J]. 西安電子科技大學(xué)學(xué)報(bào),2009,36(3):443-447
Hu Guoping, Zhang Shouhong. Study of Target Recognition Based on Multi-Sensor Cooperating with Exploration[J]. Journal of Xidian University, 2009, 36(3): 443-447 (in Chinese)
[2]Hernandez M, Benavoli A, Graziano A, et al. Performance Measures and MHT for Tracking Move-Stop-Move Targets with MTI Sensors[J]. IEEE Trans on Aerospace and Electronic Systems, 2011, 47(2): 996-1025
[3]王寶樹(shù), 李芳社. 基于數(shù)據(jù)融合技術(shù)的多目標(biāo)跟蹤算法研究[J]. 西安電子科技大學(xué)學(xué)報(bào),1998,25(3): 269-272
Wang Baoshu, Li Fangshe. Multi Target Tracking Algorithm Base on Data Fusion[J]. Journal of Xidian University,1998, 25(3): 269-272 (in Chinese)
[4]施立濤. 多傳感器信息融合中的時(shí)間配準(zhǔn)技術(shù)研究[D]. 長(zhǎng)沙: 國(guó)防科技大學(xué),2010
Shi Litao. Study on Time Registration Technology for Multi-Sensor Information Fusion[D]. Changsha, National University of Defense Technology, 2010 (in Chinese)
[5]Li W, Leung H, Zhou Yifeng. Space-Time Registration of Radar and ESM Using Unscented Kalman Filter[J]. IEEE Trans on Aerospace and Electronic System, 2004, 40(3): 824-836
[6]潘自凱,董文鋒,王正國(guó). 基于曲線擬合的PRS/IRS時(shí)間對(duì)準(zhǔn)方法研究[J]. 空軍雷達(dá)學(xué)院學(xué)報(bào),2011,25(5): 343-346
Pan Zikai, Dong Wenfeng, Wang Zhengguo. Study on PRS/IRS Time Registration Based on Curve Fitting[J]. Journal of Air Force Radar Academy, 2011, 25(5): 343-346 (in Chinese)
[7]梁凱, 潘泉, 宋國(guó)民,等. 基于曲線擬合的多傳感器時(shí)間對(duì)準(zhǔn)方法研究[J]. 火力與指揮控制, 2006,31(12): 51-53
Liang Kai, Pan Quan, Song Guoming, et al. The Study of Multi-Sensor Time Registration Method Based on Curve Fitting[J]. Fire Control and Command Control, 2006, 31(12): 51-53 (in Chinese)
[8]雍霄駒,方洋旺,高翔,楊鵬飛. 自適應(yīng)變長(zhǎng)滑窗曲線擬合時(shí)間配準(zhǔn)算法[J]. 西安電子科技大學(xué)學(xué)報(bào), 2014, 41(3): 209-213
Yong Xiaoju, Fang Yangwang, Gao Xiang, Yang Pengfei. Time Registration Using the Curve Fitting Algorithm of the Adaptive Changed Length Moving Window[J]. Journal of Xidian University, 2014, 41(3): 209-213 (in Chinese)
[9]雍霄駒,方洋旺,高翔,張磊,封普文. 用于多源信息中制導(dǎo)的MM-LS時(shí)間配準(zhǔn)算法[J]. 西安電子科技大學(xué)學(xué)報(bào),2014,41(4):166-172
Yong Xiaoju, Fang Yangwang, Gao Xiang, Zhang Lei, Feng Puwen. MM-LS Time Registration Algorithm in Middle Guidance Using Multi-sensor Information[J]. Journal of Xidian University, 2014, 41(4): 166-172 (in Chinese)
[10] 董凱,關(guān)欣,劉瑜,何友. 基于機(jī)動(dòng)檢測(cè)的自適應(yīng)實(shí)時(shí)時(shí)間配準(zhǔn)算法[J]. 雷達(dá)科學(xué)與技術(shù),2014,12(2):86-90
Dong Kai, Guan Xin, Liu Yu, He You. Adaptive Real-Time Registration Algorithm Based on Target Maneuver Detection[J]. Radar Science and Technology, 2014, 12(2): 86-90 (in Chinese)
[11] Chang Dahchung, Fang Mengwei. Bearing-Only Maneuvering Mobile Tracking With Nonlinear Filtering Algorithms in Wireless Sensor Networks[J]. IEEE Trans on Systems Journal, 2014, 8(1): 160-170
[12] 李世忠,王國(guó)宏,吳巍,蘇少濤. 雷達(dá)間歇工作下的雷達(dá)/紅外復(fù)合制導(dǎo)跟蹤[J]. 紅外與激光工程,2012,41(6): 1405-1410
Li Guozhong, Wang Guohong, Wu Wei, Su Shaotao. Radar and Infaraed Sensor Compound Guidance with Radar Under Intermittent-Working State[J]. Infrared and Laser Engineering, 2012, 41(6): 1405-1410 (in Chinese)
[13] 張俊根,姬紅兵. IMM迭代擴(kuò)展卡爾曼粒子濾波跟蹤算法[J]. 電子與信息學(xué)報(bào),2010,32(5):1116-1120
Zhang Jungen, Ji Hongbing. IMM Iterated Extended Kalman Particle Filter Based Target Tracking[J]. Journal of Electronics & Information Technology, 2010, 32(5): 1116-1120 (in Chinese)
IMM Extended Kalman Filter Time Registration Algorithm Based on Maneuvering Target
Gao Ying1,2, Han Hongshuai1, Wu Mengjie2, Wang Yongting2
1.School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China 2.Science and Technology on Electro-Optic Control Laboratory, Luoyang 471009, China
Abstract:Now time registration process is researched at the situation of the target model known. In fact, it is difficult to make ensure accuracy of the time registration when sports model of the maneuvering target are always varied and not known previously. This paper presents an algorithm on IMM extended Kalman filter (IMM-EKF) time registration based on maneuvering target. In the algorithm, each motion model were output by extended kalman filter while residues obtain by the filtering process differential probability to calculate for each model, and use the model probability and output of each model to calculate last sample point state estimation, then use the point of state and probabilistic models to extrapolate to obtain the registration time position when ratio between the period of time registration and the period sensor sampling is not an integer. The simulation results show that the algorithm can effectively reduce the overall time of registration error. The algorithm improves the accuracy of the registration period for data fusion provides a good foundation.
Keywords:data fusion, extended Kalman filters, information fusion, IMM, EKF, time registration
收稿日期:2016-03-03
基金項(xiàng)目:光電控制技術(shù)重點(diǎn)實(shí)驗(yàn)室與航空科學(xué)基金(20145153027)資助
作者簡(jiǎn)介:高穎(1965—),西北工業(yè)大學(xué)副教授,主要從事虛擬現(xiàn)實(shí)及數(shù)據(jù)融合研究。
中圖分類(lèi)號(hào):TN95.3
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1000-2758(2016)04-0621-06
