變分模態(tài)分解在軸承故障診斷中的應(yīng)用
2016-07-25 07:06:00岳應(yīng)娟孫鋼蔡艷平劉長(zhǎng)江張世雄
軸承 2016年8期
岳應(yīng)娟,孫鋼,蔡艷平,劉長(zhǎng)江,張世雄
(第二炮兵工程學(xué)院,西安 710025)
軸承振動(dòng)信號(hào)具有非線性、非平穩(wěn)的特性,傳統(tǒng)的信號(hào)分析方法難以處理,經(jīng)驗(yàn)?zāi)B(tài)分解(Empirical Mode Decomposition,EMD)[1-5]能夠較好地處理此類信號(hào),但也存在端點(diǎn)效應(yīng)、包絡(luò)擬合及模態(tài)混疊等問題[6-9],仍需進(jìn)一步優(yōu)化。
變分模態(tài)分解(Variational Mode Decomposition,VMD)[10]是一種新的自適應(yīng)信號(hào)處理方法,其本質(zhì)上是多個(gè)自適應(yīng)維納濾波組,有著良好的噪聲魯棒性。VMD可實(shí)現(xiàn)信號(hào)頻域內(nèi)各個(gè)分量的自適應(yīng)剖分,有效克服EMD算法分解過程中的模態(tài)混疊及偽分量等不足,比EMD有更強(qiáng)的噪聲魯棒性及較小的端點(diǎn)效應(yīng)。因此,嘗試將VMD與譜峭度相結(jié)合,用于軸承故障信號(hào)的診斷。
1 變分模態(tài)分解算法
VMD通過迭代搜尋變分模型的最優(yōu)解來確定每個(gè)本征模態(tài)分量(Intrinsic Mode Function, IMF)的中心頻率和帶寬,實(shí)現(xiàn)信號(hào)頻域和各個(gè)IMF的自適應(yīng)剖分,是一種完全非遞歸的信號(hào)分解方法。
信號(hào)經(jīng)過VMD處理被分解成一系列IMF,每個(gè)IMF都可以表示為一個(gè)調(diào)幅-調(diào)頻uk(t)信號(hào),表達(dá)式為
uk(t)=Ak(t)cos(φk(t)) ,
(1)

為估算每個(gè)IMF的帶寬,可分3個(gè)步驟:1)通過 Hilbert 變換計(jì)算與每一個(gè)模態(tài)uk(t)相關(guān)的解析信號(hào);2)通過加入指數(shù)項(xiàng)調(diào)整各自估計(jì)的中心頻率,將uk(t)的頻譜變換到基帶上;3)對(duì)解調(diào)信號(hào)進(jìn)行 H1高斯平滑,估計(jì)帶寬。
假設(shè)信號(hào)經(jīng)VMD處理后分解為K個(gè)IMF,則變分約束模型為
(2)
式中:δ(t)為Dirac分布;*表示卷積;k=1,2,…,K;f為原始信號(hào)。
為求取變分約束模型的最優(yōu)解,引入二次罰函數(shù)項(xiàng)α和Lagrange乘子λ可得
L({uk},{ωk},λ)=
(3)
VMD采用乘法算子交替的方法求取上述變分約束模型,得到最優(yōu)解將信號(hào)分解成為K個(gè)窄帶IMF,其實(shí)現(xiàn)流程如下:
2)令n=n+1,執(zhí)行整個(gè)循環(huán)。
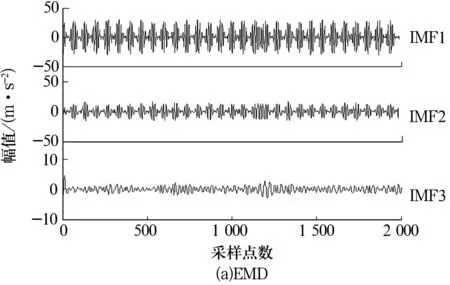
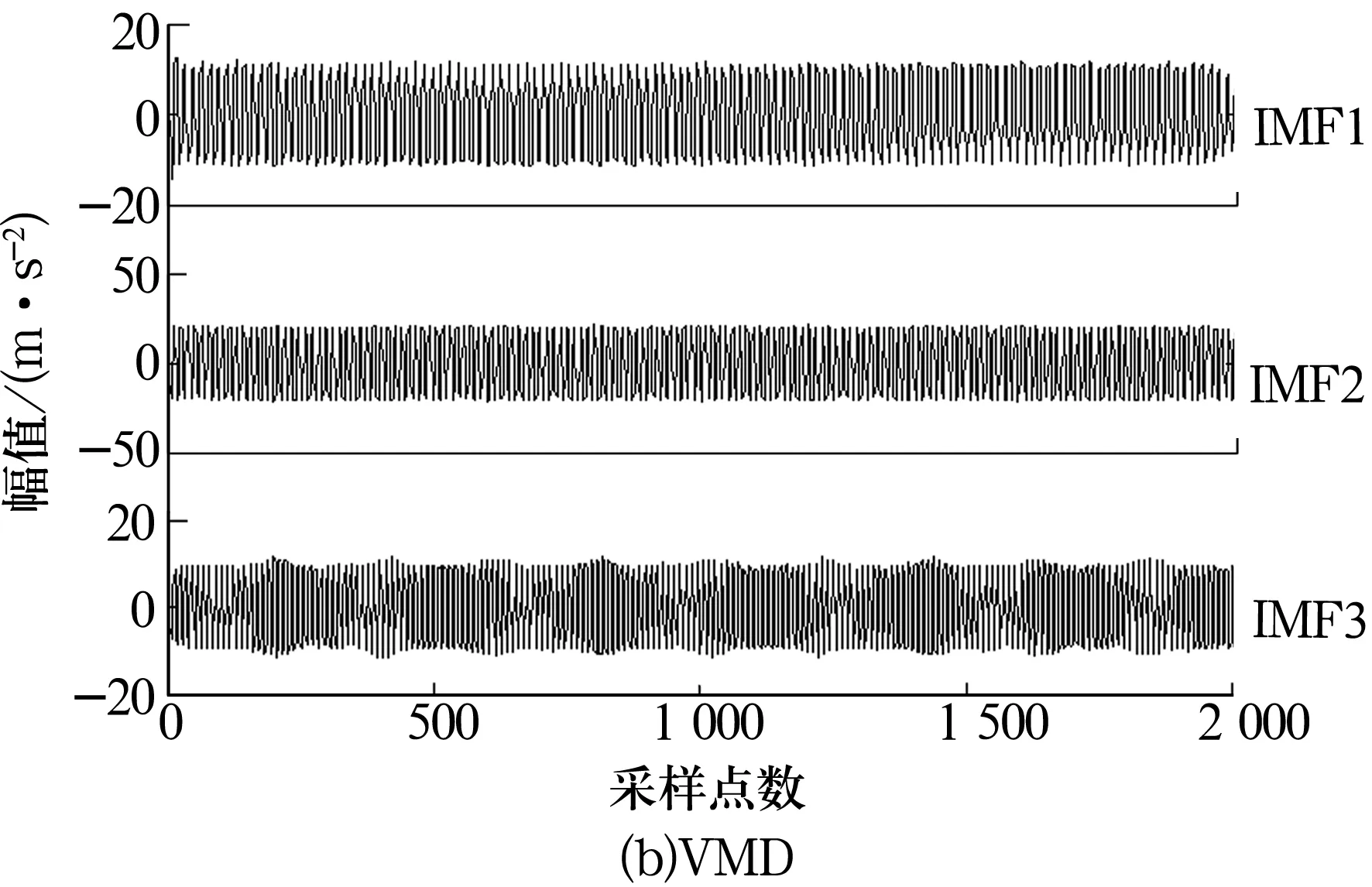
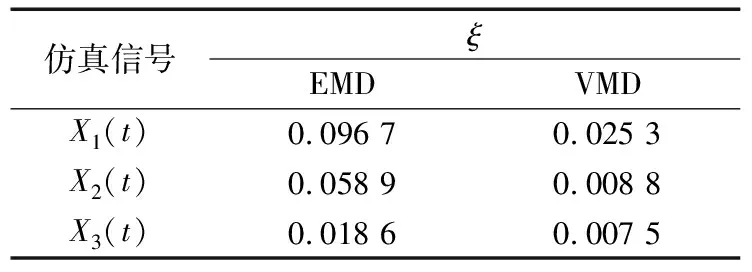
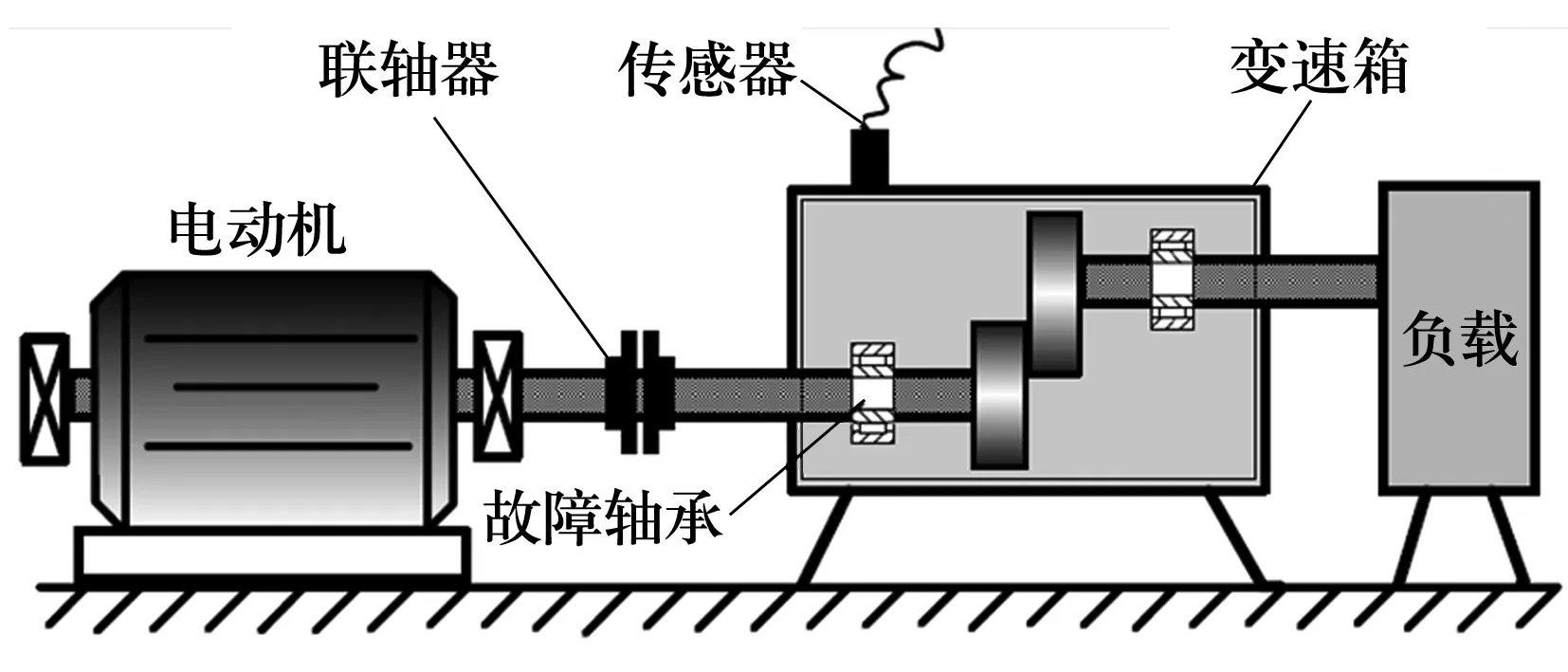
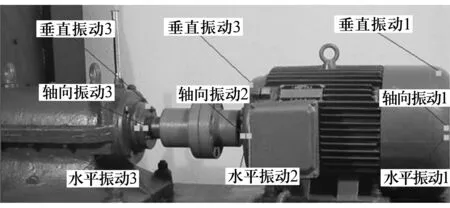
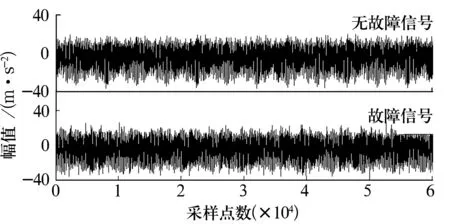
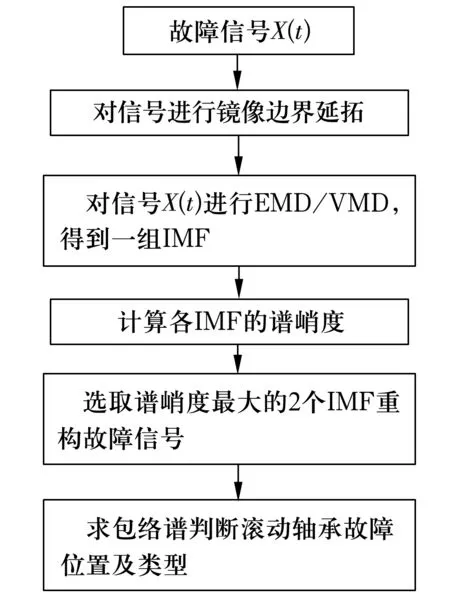
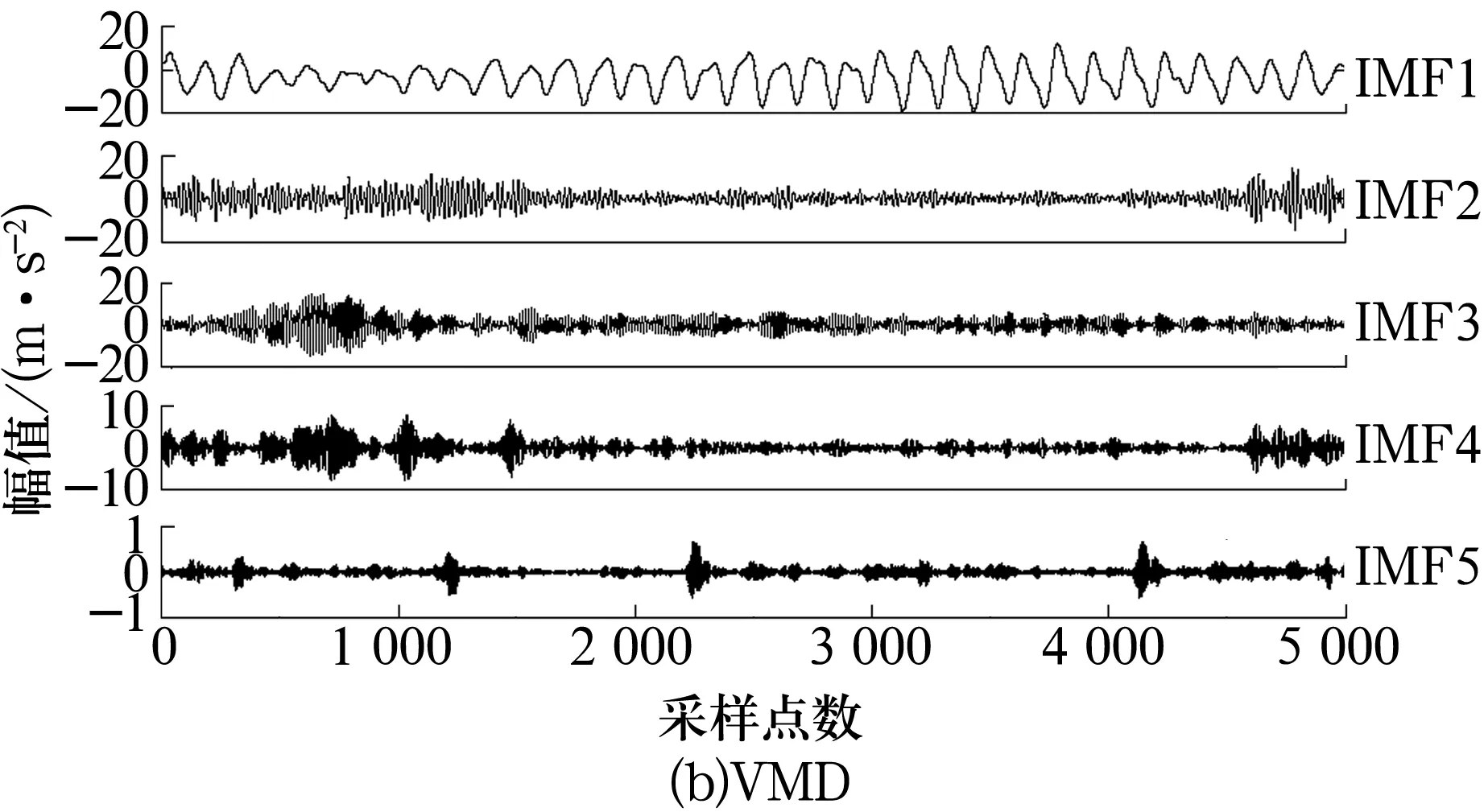
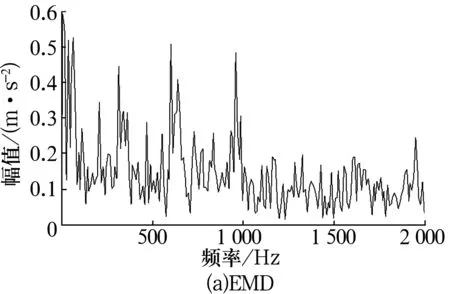
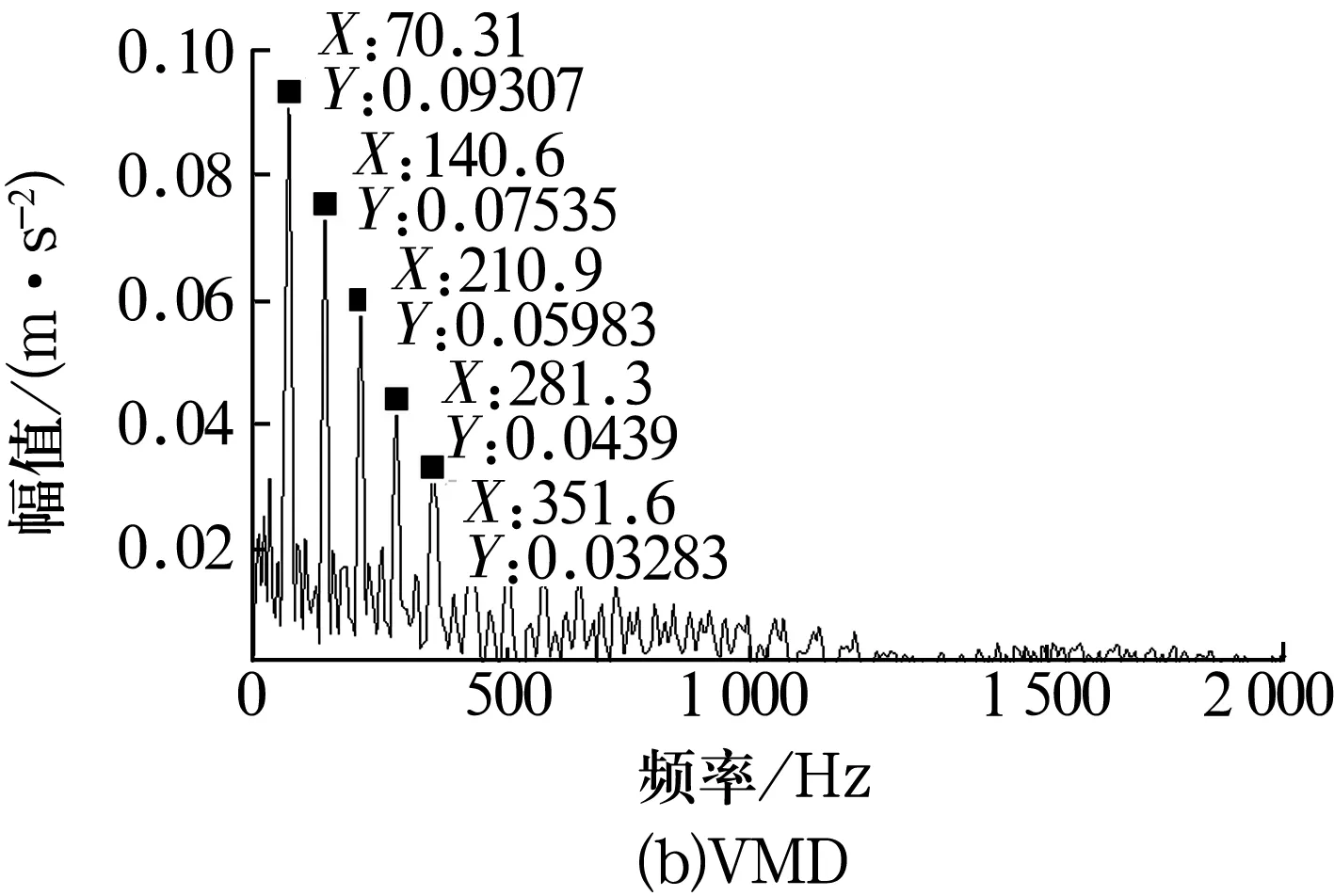
3)令k=0,k=k+1,當(dāng)k 4)令k=0,k=k+1,當(dāng)k 。(5) 5)更新λ為 (6) 使用MATLAB2011進(jìn)行仿真分析,為算法比對(duì)的合理性,降低端點(diǎn)效應(yīng)的影響,在EMD和VMD處理過程中均采用了鏡像延拓。VMD算法中的α取默認(rèn)值2 000;K的取值采用觀察中心頻率的方法確定[11]。 仿真信號(hào)采用多頻信號(hào)X1(t)和標(biāo)準(zhǔn)差為1的隨機(jī)噪聲信號(hào)疊加所得,表達(dá)式為 X1(t)=[1+cos(2π×30t)]×cos(2π×125t)+[1+cos(2π×30t)]×cos[2π×155t+cos(2π×5t)]+[1+cos(2π×30t)]×cos(2π×185t)。(7) 采樣處理后的仿真信號(hào)如圖1所示,分別采用EMD(分解過程中采用基于互信息的方法去除了偽分量)和VMD算法進(jìn)行處理,分解結(jié)果如圖2所示,分解后IMF的頻譜分析結(jié)果如圖3所示。 圖1 仿真信號(hào) 圖2 不同算法分解后的信號(hào) 圖3 分解后信號(hào)的頻譜圖 從圖3a中可以看出,IMF1中主要包含了155和185 Hz的頻率成分;IMF2中主要有125和155 Hz的頻率成分;IMF3則混合了65~95 Hz的頻率成分。結(jié)果表明,對(duì)于多分量加噪合成仿真信號(hào),EMD算法的分解效果并不理想,模態(tài)混疊嚴(yán)重。這是由于一些微弱的信號(hào)和噪聲淹沒在待分解信號(hào)中, EMD在篩分過程中的3次樣條包絡(luò)擬合導(dǎo)致了分解偏差。微弱信號(hào)嵌入到強(qiáng)信號(hào)的絕大多數(shù)地方,EMD均能篩選并提取出,但當(dāng)微弱信號(hào)僅出現(xiàn)在強(qiáng)信號(hào)的最大斜率范圍上時(shí),微弱信號(hào)會(huì)以波內(nèi)頻率調(diào)制的形式出現(xiàn),并不產(chǎn)生額外的局部極值點(diǎn),EMD很難提取,進(jìn)而產(chǎn)生嚴(yán)重的模態(tài)混疊和偽分量。 從圖2b和圖3b可以看出, VMD不僅能有效去除偽分量,而且每個(gè)IMF均表現(xiàn)出某一尺度范圍的模態(tài),彼此之間沒有模態(tài)混疊現(xiàn)象,實(shí)現(xiàn)了對(duì)仿真信號(hào)的多尺度表征,分解效果好于EMD,且具有很好的噪聲魯棒性。 EMD和VMD算法的分解結(jié)果都是正交的,即分解后各IMF的能量之和等于分解前信號(hào)的能量。但EMD和VMD的分解結(jié)果都不同程度地存在端點(diǎn)效應(yīng),影響信號(hào)的分解精度,導(dǎo)致虛假分量的產(chǎn)生,致使分解后IMF的總能量發(fā)生變化。在此,通過分析信號(hào)分解前后能量值的變化對(duì)比端點(diǎn)效應(yīng)對(duì)EMD和VMD的影響[13]。 求取給定信號(hào)X(t)經(jīng)過EMD和VMD分解后產(chǎn)生的IMF分量的能量 (8) 式中:E為給定信號(hào)X(t)或分解后各IMF的能量;x(i)為信號(hào)序列;n為信號(hào)的采樣點(diǎn)數(shù)。 比較各IMF能量總和與給定信號(hào)能量值之間的偏差,得到評(píng)價(jià)指標(biāo)為 (9) 式中:Ex為給定信號(hào)的能量;Ep為第p個(gè)IMF的能量;K為IMF總數(shù),包括分解的殘余項(xiàng)。 由定義可知,ξ越大,分解后的能量泄漏就越大,端點(diǎn)效應(yīng)越強(qiáng)。ξ=0表示端點(diǎn)效應(yīng)對(duì)分解結(jié)果幾乎沒有影響。構(gòu)造仿真信號(hào)為 X2(t)=sin(2π×3t)+0.3sin(2π×11t)+ 0.8sin(2π×25t)+sin(2π×40t)+0.6cos(2π×100t), (10) X3(t)=[1+0.5cos(2π×4t)]×cos[2π×100t +2cos(2π×5t)]+[1+sin(2π×5t)]×sin[2π× 50t+0.5cos(2π×5t)]。 (11) 分別對(duì)3個(gè)仿真信號(hào)進(jìn)行分析,采用EMD和VMD處理時(shí)不進(jìn)行鏡像延拓,且分解時(shí)不去除偽分量,分解后求取的ξ見表1。由表可知,VMD的能量泄漏小,端點(diǎn)效應(yīng)不明顯,結(jié)果優(yōu)于EMD算法。 表1 能量泄漏評(píng)價(jià)指標(biāo) 依據(jù)實(shí)測(cè)軸承振動(dòng)信號(hào),進(jìn)一步對(duì)比分析EMD與VMD算法的分解結(jié)果。采用某變速箱軸承內(nèi)圈故障振動(dòng)信號(hào),故障軸承型號(hào)為KOYO 1205,鋼球數(shù)Z=12,鋼球直徑Dw=7.12 mm,接觸角α=0,球組節(jié)圓直徑Dpw=38.5 mm,變速箱運(yùn)行時(shí)軸的轉(zhuǎn)速約為600 r/min(fr=10 Hz),計(jì)算得內(nèi)圈故障特征頻率為71.1 Hz。 利用電火花在軸承內(nèi)圈溝道設(shè)置面積約3.58 mm2的點(diǎn)蝕,變速箱裝置簡(jiǎn)圖如圖4所示,通過B&K3560數(shù)據(jù)采集儀采樣,傳感器布置如圖5所示,數(shù)據(jù)長(zhǎng)度為65 536,選用變速箱軸承座的垂直振動(dòng)信號(hào)(圖5中垂直振動(dòng)傳感器采集的信號(hào))作為故障診斷的研究對(duì)象。 圖4 變速箱裝置簡(jiǎn)圖 圖5 傳感器布置圖 實(shí)測(cè)振動(dòng)信號(hào)的時(shí)域波形如圖6所示,從圖中可以看出,正常信號(hào)波形與內(nèi)圈故障信號(hào)波形類似,很難直接分辨軸承是否存在故障。 圖6 實(shí)測(cè)信號(hào)時(shí)域波形 截取信號(hào)前5 000個(gè)采樣點(diǎn)的數(shù)據(jù)作為研究對(duì)象。為增強(qiáng)故障脈沖信號(hào),減小噪聲干擾,采用基于譜峭度和EMD/VMD的方法進(jìn)行故障信號(hào)的預(yù)處理并進(jìn)行故障診斷的分析對(duì)比。 在實(shí)測(cè)振動(dòng)信號(hào)中,往往包含著故障信號(hào)及強(qiáng)烈的加性噪聲。由譜峭度的定義[14]可知,在信噪比很高的頻率處,譜峭度值大;而在噪聲強(qiáng)烈的頻率處,譜峭度值趨于0。因此,可以通過譜峭度對(duì)IMF進(jìn)行篩選,尋找出包含故障信號(hào)的頻帶。計(jì)算故障信號(hào)經(jīng)EMD或VMD算法分解后各IMF的譜峭度Ki(f),對(duì)Ki(f)進(jìn)行歸一化處理,令 (12) 式中:λi為歸一化信息值,0≤λi≤1。利用信噪比高譜峭度值大的特點(diǎn),將λi作為評(píng)判故障信號(hào)頻帶存在的指標(biāo),并設(shè)置故障頻帶分量的判斷閾值為δ,如果λi>δ,則認(rèn)為該IMF為故障頻帶分量,否則予以剔除。基于譜峭度和EMD/VMD故障診斷算法流程如圖7所示。 圖7 基于譜峭度和EMD/VMD的包絡(luò)譜故障診斷流程圖 分別使用EMD和VMD算法對(duì)軸承內(nèi)圈故障信號(hào)進(jìn)行分解,結(jié)果如圖8所示。從圖中可以看出,分解結(jié)果非常復(fù)雜,很難分辨出具體的故障特征,分別計(jì)算各IMF的譜峭度值并歸一化處理,結(jié)果見表2。 設(shè)定閾值δ為0.8,選取EMD算法分解后的IMF2,IMF3和VMD算法分解后的IMF4,IMF5分別進(jìn)行故障信號(hào)重構(gòu),并對(duì)重構(gòu)后信號(hào)進(jìn)行包絡(luò)譜分析,結(jié)果如圖9所示。 從圖9a可以看出,EMD算法分解重構(gòu)后信號(hào)的解調(diào)效果欠佳,雖能觀察到70 Hz及部分倍頻,但軸承內(nèi)圈故障信號(hào)的調(diào)制特征沒有解調(diào)出來,仍存在一定的模態(tài)混疊現(xiàn)象。 而從圖9b可以看出,經(jīng)VMD算法分解重構(gòu)后信號(hào)的包絡(luò)譜中有明顯的規(guī)律性沖擊成分,由于損傷點(diǎn)隨內(nèi)圈轉(zhuǎn)動(dòng)不斷變化,在70.3 Hz及倍頻 圖8 內(nèi)圈故障信號(hào)的分解結(jié)果 表2 各IMF的譜峭度值歸一化結(jié)果 處(140.6,210.9,281.3 Hz等)有幅值逐漸下降的譜線,并且各倍頻處的兩邊有對(duì)稱的調(diào)制譜線。雖然與理論計(jì)算的內(nèi)圈故障特征頻率(71.1 Hz)存在一定差值,但也要考慮鋼球在旋轉(zhuǎn)過程中并非是純滾動(dòng),而且軸承存在幾何誤差和裝配誤差等因素,因此,可認(rèn)為VMD算法處理后信號(hào)的包絡(luò)譜圖呈現(xiàn)出了典型的軸承內(nèi)圈故障特征,從而判定軸承存在內(nèi)圈故障。同理,對(duì)軸承外圈及鋼球故障進(jìn)行分析,也取得了很好的效果。 圖9 重構(gòu)信號(hào)的包絡(luò)譜圖 VMD和EMD算法均可對(duì)信號(hào)進(jìn)行不同尺度的表征,但VMD算法避免了模態(tài)混疊以及偽分量的產(chǎn)生,能較好地在不同尺度下表征原信號(hào),且在噪聲魯棒性和避免端點(diǎn)效應(yīng)方面均優(yōu)于EMD算法。將VMD和EMD分別與譜峭度相結(jié)合,對(duì)實(shí)測(cè)軸承振動(dòng)信號(hào)的故障診斷結(jié)果表明,VMD算法的包絡(luò)譜能更好地反映故障頻段的變化及軸承故障的包絡(luò)譜特征。
2 仿真分析
2.1 仿真信號(hào)的分解對(duì)比


2.2 端點(diǎn)效應(yīng)的影響
3 基于譜峭度和VMD算法的包絡(luò)譜故障診斷方法
3.1 試驗(yàn)條件
3.2 診斷流程
3.3 對(duì)比分析


4 結(jié)束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42電子制作(2018年11期)2018-08-04 03:25:42汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39