基于主從架構的三維回轉工作臺測角儀控制系統設計
2016-07-26 10:13:18楊宇博
裝備制造技術 2016年4期
楊宇博
(天津市特種設備監督檢驗技術研究院,天津300192)
?
基于主從架構的三維回轉工作臺測角儀控制系統設計
楊宇博
(天津市特種設備監督檢驗技術研究院,天津300192)
摘要:三維回轉測角儀體積小,結構簡單,能夠自動化測量光楔的角度。設計了三維回轉測角儀控制系統,該系統采用工控機與單片機結合的主從架構:工控機負責主控任務,基于VC++設計界面,通過串口與單片機通信;利用單片機體積小、功耗低、易于開發的特點設計運動控制卡,實現裝置三維回轉測角儀的實時運動控制任務。該控制系統設計成本低,便于操控,為工作生產提供了便捷。
關鍵詞:三維回轉;測角儀;光楔;主從結構
光楔[1]是光學儀器中的重要光學元件,雙光楔有兩個具有一定楔角的光學平板玻璃組成,光線垂直入射光楔的前表面后經過一系列的折射,從后表面出射產生一定的偏向角。研究人員通過改變光楔的旋轉方向和轉速可以產生不同大小的偏向角,可以得到許多不同的掃描圖形,因而需要準確知道光楔的角度。光楔測角儀主要有一維和二維[2-3],以二維[4]結構型式居多,三維較少見,主要用作二維測量及分度裝置。市場上的三維回轉測量往往依賴手動調節的方式實現,這就造成了工作難度大并且精度難以保證,因此研究一種自動三維回轉測角儀具有重要意義,以能夠實現光楔角度自動測量,提高生產效率,降低勞動強度。
1 回轉工作臺
回轉工作臺是由三個回轉軸和三臺步進電機驅動的滾珠絲杠組成,如圖1所示。回轉工作臺為系統被控對象,用來放置光楔,控制系統的運動規劃都是圍繞其動作的。可將其從上到下分別命名A、B、C三軸,它們的自由度可以通過空間坐標軸來描述,建立坐標系,如圖2所示,以工作臺中心為原點,鉛錘方向為Z軸,垂直光屏方向為X軸;那么就知道了A軸繞X軸旋轉,同理可得B對應Y軸、C對應Z軸;可以通過運動控制卡來快速調節不同軸的旋轉運動的位移與方向讓鍺光楔的空間位置達到理想狀態,便于快速測量提高工作效率。

圖1 回轉工作臺

圖2 工作臺三軸運動方向簡化圖
2 準直儀
準直儀用來測量光楔角度,屬于角度測量部分,控制系統根據準直儀的測量結果進行運動規劃。AUTOMAT 1000系列雙軸光電自準直儀如圖3所示,采用光學自準直原理設計,結合半導體發光元件及線掃描CCD成像技術,通過內部嵌入式處理器進行高速實時信號處理,可同時對大范圍二維角度獨立進行精密測量;全系列AUTOMAT準直儀產品均采用了專利電子目鏡技術,去除了傳統目鏡瞄準結構,找準直觀且方便,配合專用激光找準附件,可進行最長達25 m的測量距離。它在本裝置中利用光學自準直原理來測平面度是否一致。

圖3 準直儀
3 三維回轉測角儀基本原理
該裝置運用光學反射原理和數控相結合,使測角實現自動化,便于工人的控制與精準測量。其三維測角原理:采用一束光經光楔,如圖4所示,表面1反射在光屏上的位置來調整鍺光楔的空間位置,此時設為基準點,然后通過調節回轉工作臺讓光經過鍺光楔的2表面反射后能與基準點重合,根據前后調節過程中步進電機轉角的大小與軸的位置來確定該鍺光楔的角度大小及測出該光楔的角度。

圖4 光楔形狀
根據上述的原理,設計主從式架構控制系統,其硬件構成如圖5所示,采用工控機與單片機結合的主從架構:工控機負責主控任務,基于VC++設計界面,通過具有光電隔離功能的USB轉RS232串口模塊與運動控制卡通信;利用單片機體積小、功耗低、易于開發的特點設計運動控制卡,實現裝置三維回轉測角儀的實時運動控制任務。
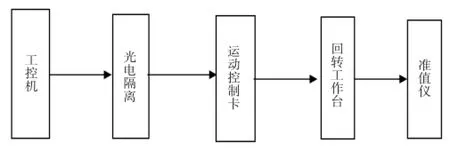
圖5 硬件構成圖
基于STM32系列STM32F103VCT6單片機設計了4軸脈沖型運動控制卡。主要功能有:8路光耦輸入;4路步進電機輸出控制(4路方向控制、4路脈沖輸出);2路繼電器輸出;RS232串口通信,可實現與工控機的通信。
4 軟件設計
基于VC++設計操作界面如圖6所示,該操作界面簡潔﹑便于操控,左邊的二維面板將準直儀分成了四個象限,這樣我們能較為直觀地觀看到光點所處的位置,便于我們來進行左邊的操作。而右邊分成的四個部分:數據采集、參數設置、轉臺手動控制和停止等操作按鈕。數據采集和參數設置則是準直儀的調控過程,轉臺手動控制則是便于人為的操控,跳過機械的緩慢性調節有利于提高工作效率。
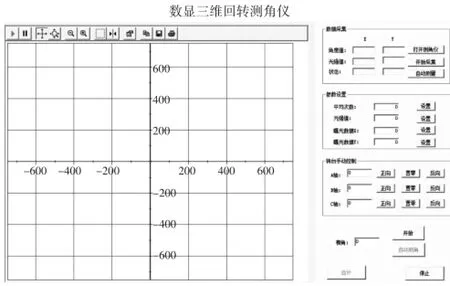
圖6 操作界面
本裝置是采用工作臺的B軸的回轉角度來計算鍺光楔的角度;A、C軸的控制是來調整光楔的空間位置以便測量,因為手動調節的效率低且準確率低。測角流程圖如圖7所示,直觀詳細描述了測角的過程,根據前后兩次的B軸回轉的角度的差值即為所測的角度值。實際測試表明,該系統能夠完成光楔角度測量。
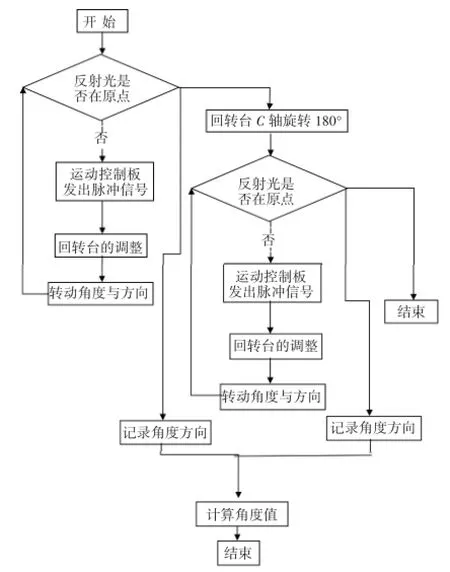
圖8 測角流程圖
5 結束語
本文利用單片機體積小、功耗低、易于開發的特點設計運動控制卡,實現裝置三維回轉測角儀的實時運動控制任務。該主從架構控制系統成本低,便于操控,為工作生產提供了便捷,小巧占地空間小,自動測量角度。因此,它可以應用于光楔的角度測量,提高生產效率。
參考文獻:
[1]鄭垠波,巴榮聲,袁靜,等.90°石英旋光片和光楔在聚焦光束近場質量測量中的應用[J].科學技術與工程,2014,14 (9):127-130.
[2]謝啟華,李衛升,黃云.激光陀螺測角儀測角誤差來源研究[J].激光技術,2012,36(2):174-178.
[3]魏曉蓉.精密雙軸位置轉臺設計[D].成都:電子科技大學,2008.
[4]吳武峰.精密獨立回轉雙工作臺的研究設計[D].重慶:重慶理工大學,2015.
中圖分類號:TP23
文獻標識碼:A
文章編號:1672-545X(2016)04-0074-03
收稿日期:2016-01-03
作者簡介:楊宇博(1986-),男,天津人,工學士學位,助理工程師,研究方向:機械制造及自動化方向。
Design of the Control System of the Angle Measuring Instrument based on the Principal and Subordinate Structure
YANG Yu-bo
(Tianjin Special Equipment Supervision and Inspection Institute,Tianjin 300192,China)
Abstract:Three-dimensional rotation goniometer is small size and simple structure,which can measure optical wedge angle automated.In this paper the goniometer digitized and automated control system was designed.The system uses IPC and MCU combination of master-slave architecture:industrial PC is responsible for control tasks,based on VC++interface design,through the serial communication with the microcontroller;the use of singlechip,small size,power consumption is low,easy to develop the characteristics of motion control card design,three-dimensional real-time motion control tasks means rotating goniometer.The control system is designed for low cost,easy to control,to provide a convenient for the work produced.
Key words:three-dimensional rotation;goniometer;optical wedge;master-slave architecture